
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
How Do V2V and V2I Messages Affect the Performance of Driving Smart Vehicles?
1 Department of Information Engineering, Florence University, Florence, Italy
2 Department of Computer Engineering, College of Computer and Information Sciences, Majmaah University, Majmaah, Saudi Arabia
* Corresponding Author: Abdullah Alsaleh. Email:
Computer Systems Science and Engineering 2023, 47(2), 2313-2336. https://doi.org/10.32604/csse.2023.039682
Received 10 February 2023; Accepted 09 May 2023; Issue published 28 July 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Intelligent transportation systems (ITSs) are becoming increasingly popular as they support efficient coordinated transport. ITSs aim to improve the safety, efficiency and reliability of road transportation through integrated approaches to the exchange of relevant information. Mobile ad-hoc networks (MANETs) and vehicle ad-hoc networks (VANETs) are integral components of ITS. The VANET is composed of interconnected vehicles with sensitivity capabilities to exchange traffic, positioning, weather and emergency information. One of the main challenges in VANET is the reliable and timely dissemination of information between vehicular nodes to improve decision-making processes. This paper illustrates challenges in VANET and reviews possible solutions to improve road safety control and management using V2V and V2I communications. This paper also summarizes existing rules-based and optimized-based solutions, including reducing the effect of mixed environments, obstacles, malfunctions and short wireless ranges on transportation efficiency and reducing false messages that cause unintended vehicle actions and unreliable transportation systems. Additionally, an event simulation algorithm was designed to maximize the benefits of exchangeable messages among vehicles. Furthermore, simulated VANET environments were developed to demonstrate how the algorithm can be used for transformable messages. Experimental results show that coupling of both V2V and V2I messages yielded better results in terms of end-to-end delay and average time. Future research directions were highlighted to be taken into account in the development of ITS and intelligent routing mechanisms.Keywords
Transport systems across the globe reel from challenges caused by pollution, traffic congestion, poor infrastructure, and low vehicle safety, which exposes both vehicles and pedestrians [1]. These challenges lead to extreme inefficiencies, which cause significant economic losses. However, the effectiveness of the transport sector can be improved by implementing intelligent transportation systems (ITSs). These systems apply sensor technologies and infrastructure to vehicles to collect and process data and make decisions based on this information [2]. Technology can help reduce delays, which increase transport time and energy consumption, leading to high demand for fossil fuels. According to [2], ITSs are autonomous and can be installed in vehicles driven by drivers who are unfamiliar with technology. The data collected from these systems are processed and used in various applications, such as generating maps and vehicle tracking.
Road accidents may occur due to human unawareness (such as driver ignorance, lack of supervision and driver divergence) and human decision errors (such as excessive speed, delayed reactions, and wrong judgment of safety distance). Reducing road accidents and continuously optimizing the transportation system requires the urgent provision of a vehicle communications network, enabling vehicles to communicate with road infrastructure and share data between them.
Traffic accidents are common worldwide and result in prolonged traffic snarls. Smart vehicles are safer owing to technological advancements in ITS. Vehicular ad hoc networks (VANETs) can provide various services, such as driving assistance, safety applications, traffic control, collision avoidance and entertainment. Conversely, several challenges may arise, including vehicles’ high mobility, infrastructure dependency, topology changes, and intermittent network connectivity. VANET turns vehicles into wireless routers enabling them to communicate with each other and also transmit their data to the cloud [3]. These routers allow inter-vehicle communications and the concept of the Internet of Vehicles (IoV), which incorporates both vehicular networking and intelligence [4]. IoV is an intelligent system that connects vehicles to public networks through mobile networks. These vehicles communicate with each other and send continuous data that can alert drivers when accidents occur, as well as enable drivers to avoid collisions by analyzing the traffic on a busy road. Thus, by sharing information about infrastructure and vehicles, users can guide vehicles efficiently avoiding congested areas and traffic accidents.
Intelligent vehicles can communicate with each other in vehicle-to-vehicle communication (V2V) or with the infrastructure in vehicle-to-infrastructure (V2I) communication. V2V systems use radio technologies to transmit data between vehicles. These systems aim to provide accident prevention data to drivers with minimum latency for active safety [5]. Through these systems, drivers receive information that is beyond their line of sight, which helps them respond accordingly. V2V systems transmit periodic and event-driven messages. The former refers to status updates that provide details, such as the speed and location of a vehicle. However, event-driven messages are sent when an incident occurs, such as an airbag deployment [6]. Collision warning systems are also part of V2V intelligent systems that collect data and send warning messages on detecting a potential event that might lead to an accident. However, they are effective only if other vehicle drivers respond promptly upon receiving them immediately.
Conversely, vehicle-to-infrastructure communication occurs between onboard sensors and the infrastructure. Vehicles communicate with roadside units (RSUs) that act as access points for the network [7]. According to [8], V2I communication can be used to control traffic lights by sending information about the location and speed of the vehicle. The same idea is shared in [9], where traffic lights change depending on the proximity of vehicles to a junction. In addition to traffic control, V2I systems send warning messages as part of automatic incident detection (AID) functionalities [10]. These messages are broadcasted when there is an incident on a certain route enabling the drivers to take necessary precautions.
To develop innovative ITS and find the best solutions for limitations and challenges, it is essential to precisely analyze the existing methods. This paper provides a comprehensive study of various methods and paradigms that have been used to improve vehicular communications. In addition, V2V and V2I events simulation algorithms are presented. This paper is organized as follows. Section 2 describes previous work related to VANET and ITS. Section 3 details challenges in coordination problems in VANET. Section 4 discusses rule-based and optimized-based solutions for coordination problems in VANET. Section 5 presents the proposed flexible coordination strategy and algorithms. Section 6 presents the evaluation and discussion. Section 7 concludes this work and proposes future research directions.
A study by [11] indicated that about 60% of traffic accidents could be avoided if drivers received warning messages a few seconds before the accident. Governments, researchers, and the car manufacturing industry use VANETs in the ITS infrastructure [12] argued that VANETS are a subset of MANETS since vehicles play the role of mobile nodes. They are effective since they cover an area, utilize direct V2V wireless communication, have low latency, and require little power to operate [12]. In this setup, each vehicle acts as a router, a packet sender, and a receiver. This allows them to send and receive messages from other vehicles and RSUs along highways. On the other hand, reference [13] sought to expand current VANETS by incorporating cognitive radio (CR) technology to form a CR-VANET. The authors claim that the increase in vehicular applications in cities will overcrowd the 75 MHz that the Federal Communications Commission allocates for ITS and the 30 MHz spectrum allocated by the European Telecommunications Standards Institute (ETSI). The use of CR will improve communication by maximizing spectrum utilization. Cognitive radio allows transceivers to detect channels that are used and those that are available [14]. In this way, a transceiver can intelligently avoid occupied channels and communicate with the available ones.
In [15], the authors introduced a hybrid architecture that combines V2I and V2V communication. This hybrid allows vehicles to communicate with the infrastructure in either a single- or a multi-hop fashion. When the vehicle is far from an RSU, it can route data over the Internet to link to the nearest unit or vehicle. In this way, vehicles on highways with poor network coverage can still communicate with RSUs and other vehicles. Regardless of the infrastructure used, authors in [16] argued that the main challenge facing VANETs is the lack of a fixed infrastructure since vehicles rely on each other to provide the network. Another challenge is the high mobility and the large number of vehicles [17]. These networks have to adapt quickly to rapid position changes as vehicles speed along highways.
The rapid movement of vehicles in a VANET renders MANET routing protocols useless. Furthermore, the assumption that mobile nodes can maintain end-to-end connectivity does not apply in vehicular communication, as nodes between the source and destination may not function [18]. This requires the use of routing protocols that are unique to vehicular communication. Topology-based protocols collect information about the available links within a network before forwarding a packet from the source to the destination. Broadcast-based protocols flood the network with packets, and all nodes receive them [19]. This protocol is used to send emergency warnings that must be received by all vehicles. Cluster-based protocols group vehicles based on characteristics such as direction and velocity. Vehicles in a given cluster can communicate with each other by sending packets to the destination node. Geo-cast-based protocols create zones by subdividing the geographical land. Vehicles communicate using the zone of relevance, which reduces congestion and overhead [20]. Position-based protocols use the geographical location of a vehicle when sending packets. This protocol relies on the global positioning system (GPS) for route discovery.
Authors in [21] proposed a deep learning-based intelligent garbage detection system using an Unmanned Aerial Vehicle. They aimed to provide a low-cost, accurate, and easy-to-use solution for handling the garbage effectively and used different performance evaluation metrics such as precision, recall, F1-score, and accuracy. They achieved better performance for automatic solid waste detection with 94% accuracy. In [22], the authors presented a comprehensive review of artificial intelligence techniques that are currently being explored in the area of VANETs and discuss the strengths and weaknesses of this area. Additionally, authors in [23] analyzed various techniques used for parameter tuning for Optimization Link State Routing Protocol and illustrated the gap between these techniques. Authors in [24] designed an algorithm that helps drones define an automated path to reach their destination. They aimed to increase efficiency and provide high performance to carry out a more complex task at a greater speed.
Despite the importance of deploying ITS, there are fundamental challenges that companies creating them face. According to [25], sustainable ITS requires the seamless integration of multiple emerging technologies. Interconnected vehicles, the Internet of Things (IoT), and cloud computing are some of the emerging technologies used to integrate intelligent transport systems. In addition, these systems interface with sensor networks that transmit data between roadside units and onboard units. Combining all these technologies to form one intelligent system is a challenge for the institutions that deploy them. In addition, reference [26] stated that companies and researchers are under pressure to create novel infotainment applications that are efficient, safer, sustainable and affordable. These networks have to be flexible and autonomous, and wireless technologies meet these demands. However, reference [26] believed that innovations in software-defined networking, 5G networks, and heterogeneous networks are emerging technologies that can solve networking problems that might curtail the adoption of ITS infrastructure globally. However, the deployment of them globally is a challenge, and it will require infrastructural investments to deploy sensors and RSUs.
Another potential challenge that could hinder the efficiency of ITS is interoperability [25]. Data must be shared between multiple agencies that operate under different internal and external regulations. Vehicle manufacturers such as Tesla and Mercedes have invested heavily in intelligent vehicles that have self-driving capabilities. The sensors on these vehicles collect data and transmit it to cloud systems controlled by these companies. On the other hand, government institutions operate RSUs that control traffic lights, generate broadcasts when there is an incident and roadside sensors that monitor traffic statistics [26]. The effective operation of intelligent transport systems requires that data be shared between different agencies. However, internal and external wrangles and policies can affect the flow of data and reduce the effectiveness of these systems.
Cloudlets are used in a cloud computing infrastructure to form a 3-tier hierarchy for mobile computing. Mobile nodes have limited computing power, and they need to offload computations to the cloud. Cloudlets act as an intermediary between mobile devices and the cloud [27]. The V2V and V2I systems require cloudlets since they have to collect, process, and make decisions using data from other vehicles and the infrastructure. Due to their limited computing capabilities, they require a smart environment that can offload complex computations to the cloud to improve the speed and quality of service of these systems [27]. Furthermore, V2V and V2I are part of IoT that contains intelligent embedded systems that apply analytics to support real-time decision-making. In this setup, cloudlets play a crucial role in combining distributed ITS to solve large-scale computational problems and allow mobile vehicle systems to execute resource-intensive computations. Vehicles play the role of thin clients that rely on trusted cloudlets to provide a cluster of computers that can dynamically analyze the data collected by various sensors. Vehicles can access cloudlets using wireless technologies that have been deployed inside them and access points around cities. Wi-Fi and LAN technologies provide the infrastructure needed to access cloudlets and perform computations.
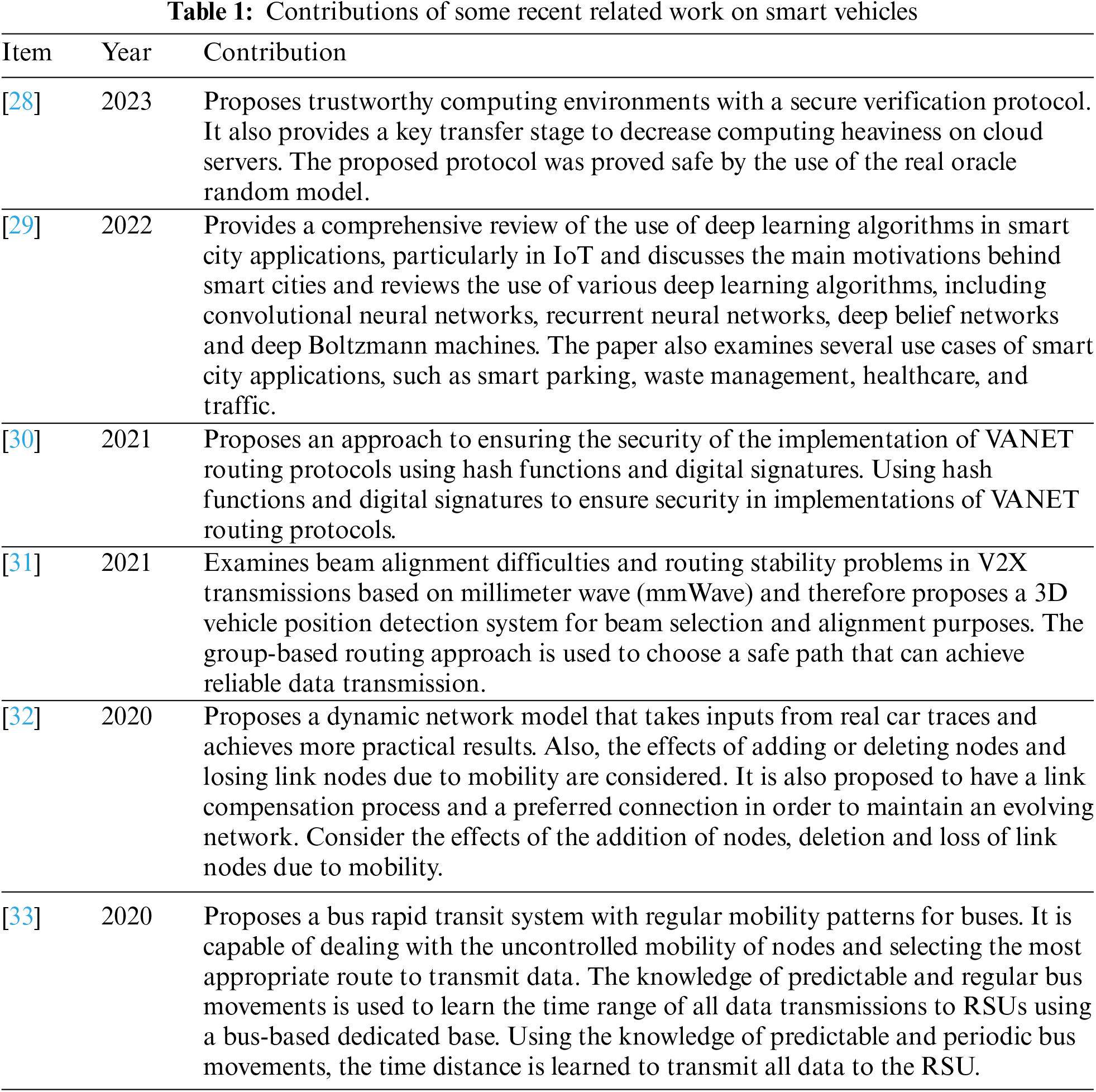
Although the issue of improving vehicular communication has been thoroughly studied and solutions have already been available, many recent studies focus on the application of artificial intelligence and machine learning technologies to study the communication environment and improve decision-making processes. Thus, the exploration and comparison of these works are interesting to better understand the dimensions of the problem. These studies have strengths and limitations that must be identified appropriately to improve the overall performance of the network and to strengthen the future design of intelligent vehicle driving capabilities. Table 1 highlights the contributions of some recent related work on smart vehicles.
3 Challenges in Vehicular Coordination in VANET
This work contributes to the fulfillment of Sustainable Development Goals- SDG-, mainly: Goal 11: Make cities inclusive, safe, resilient and sustainable, for instance, 11.2 by 2030, provide access to safe, affordable, accessible and sustainable transport systems for all. Controlling ordinary vehicles is a major challenge for transport administrators globally. According to [34], traffic congestion and collisions mainly occur because of a lack of proper management of modern transport, dependence on private vehicles, and decreasing street capacity. Poor control leads to traffic congestion, which increases energy consumption and loss of revenue with prolonged travel time. In addition, [35] argues that overreliance on human decisions causes transport systems to suffer from the shortcomings, such as slow human reaction times. However, intelligent vehicles can solve this problem by relying on technology to support the decision-making process. Smart vehicles contain sensors and cameras that gather and share heterogeneous data as they cruise along the street [36]. These vehicles use location-aware algorithms to transmit this data to nearby vehicles and infrastructure. Hence, ITS is an information-centric system that shares real-time data with RSUs and other vehicles along the way.
According to [37], smart vehicles collect data that can optimize traffic flow. As vehicles move along the roads, they compute route calculations based on the data they receive from the infrastructure and other vehicles and use these results to select dynamic routes. In our setup, vehicle1, vehicle2, and the ambulance select their routes depending on the information that they receive from the infrastructure and other vehicles. The main importance of these simulations is to demonstrate that V2I and V2V communications automate the control of traffic because vehicles can dynamically calculate the best routes depending on the incidents that occur on highways. The data can be processed centrally or onboard the vehicles and transmitted to other vehicles. In V2I, data are processed in a cloudlet and transmitted to other vehicles using the same route. Therefore, the ambulance gets to its destination within a short time because the infrastructure has already alerted other drivers of the accident.
Vehicles using ITS utilize V2V and V2I approaches to send data. In this scenario, vehicle1, vehicle2, and ambulance1 can communicate between themselves and with the infrastructure. This type of communication is important because it overcomes line-of-sight constraints [38]. These systems use radio and wireless communication to extend the driving support as drivers move from one point to another. This communication increases road safety and improves the efficiency of transport systems. Furthermore, location-based communication improves parking management, driving convenience, and enables the transmission of real-time traffic conditions that allow drivers to regulate their driving speed accordingly [39]. Therefore, vehicle1 and vehicle2 can reduce their speeds as they approach the accident scene or change the route together. Furthermore, ambulance1 can have a clear route, as other vehicles avoid the accident area. Further, efficient end-to-end communication is facilitated by cloudlets that have sufficient resources for data processing and maintaining connections with other vehicles [40]. V2V messages are transmitted over a short distance, which increases their timely reception helping drivers take the necessary actions immediately.
Despite improved communication, these systems suffer data latency when uploading data to the cloud [40]. V2I communication sends data to systems such as RSUs and traffic lights so that they can respond appropriately. However, the increased distance introduces delays compared with V2V communication. In addition, emergency messages are part of the periodic communication that is broadcast in the entire network. Therefore, the ambulance responding to the accident and the vehicles passing through roadwork would have to transmit this information to the infrastructure and other vehicles. Broadcast storms are a major problem in high-density areas where several cars transmit packets simultaneously [41]. In this scenario, the ambulance and vehicles would alert other motorists about the accident, rescue operations, and roadwork and help save time, but there would be delays if the roads were congested and every vehicle broadcasts these messages.
Intelligent transport systems rely on sensors installed on roads and inside vehicles. Wireless sensor networks provide a low-cost and reliable method for collecting data and distributing it to other vehicles and infrastructure [42]. Traditionally, drivers observe incidents on the road and transmit this information to other drivers using physical signals. In severe cases, transport authorities transmit messages on display panels located along highways to warn drivers of potential dangers along the way. However, the use of sensors provides a robust communication network that uses wireless networks. In addition, mobile sensor networks have self-organizing capabilities, and nodes can transmit data without relying on an underlying infrastructure [42]. In our scenarios, vehicle1, vehicle2, and ambulance1 can use onboard sensors and transmit this data to other vehicles and roadside units using a wireless network. As other vehicles reach the area, they are added to the network automatically as they become receivers and transmitters.
Intrusive sensors such as inductive loops and piezoelectric cables are fixed on road surfaces for the detection of passing vehicles [43]. Despite their high costs and disruptions during road repairs, they are highly accurate in detecting vehicles. However, non-intrusive sensors such as lasers, radar, and microwave sensors can monitor multiple lanes and cover different zones [43]. They can provide the speed as well as the type of vehicles passing through these areas. In our setup, the drivers of the ambulance and vehicles passing through the accident and roadwork sites can access information on the type of vehicles they might encounter when non-intrusive sensors are used. In addition, drivers moving at high speeds are instructed to slow down when approaching these areas. These sensors can also collect data over a wide geographical area [44,45]. Thus, the same system can transmit data about the accident and roadwork to vehicles that are miles away. These sensors solve the problem of learning about incidents when drivers are near the incident location.
4 Solving the Coordination Problems
Many researchers have presented various solutions in the context of automated vehicles. Although these solutions resulted in differences in focus and techniques, they can be classified into two groups: rule-based and optimization-based.
Rule-based wireless sensor networks have been deployed in various environments because they can be programmed on demand [46]. The rules are used to provide the desired behavior, such as the expected communication content, time of broadcast, and specific responses. Reference [47] proposed a rule-based decision support system (RB-DSS) used in determining the safest solutions to route Hazmat transport teams. The rules are determined based on the severity and frequency of accidents. This information helps formulate multiple scenarios to create a decision tree that facilitates expert decision-making. In this system, the researchers collect accident data and use it to create rules depending on the frequency and severity. Transport systems can use neural networks to generate safe routes by creating if-then rules formulated from the available data. The sensor networks can provide real-time data that can be fed to these neural networks to provide lane-changing information and routing.
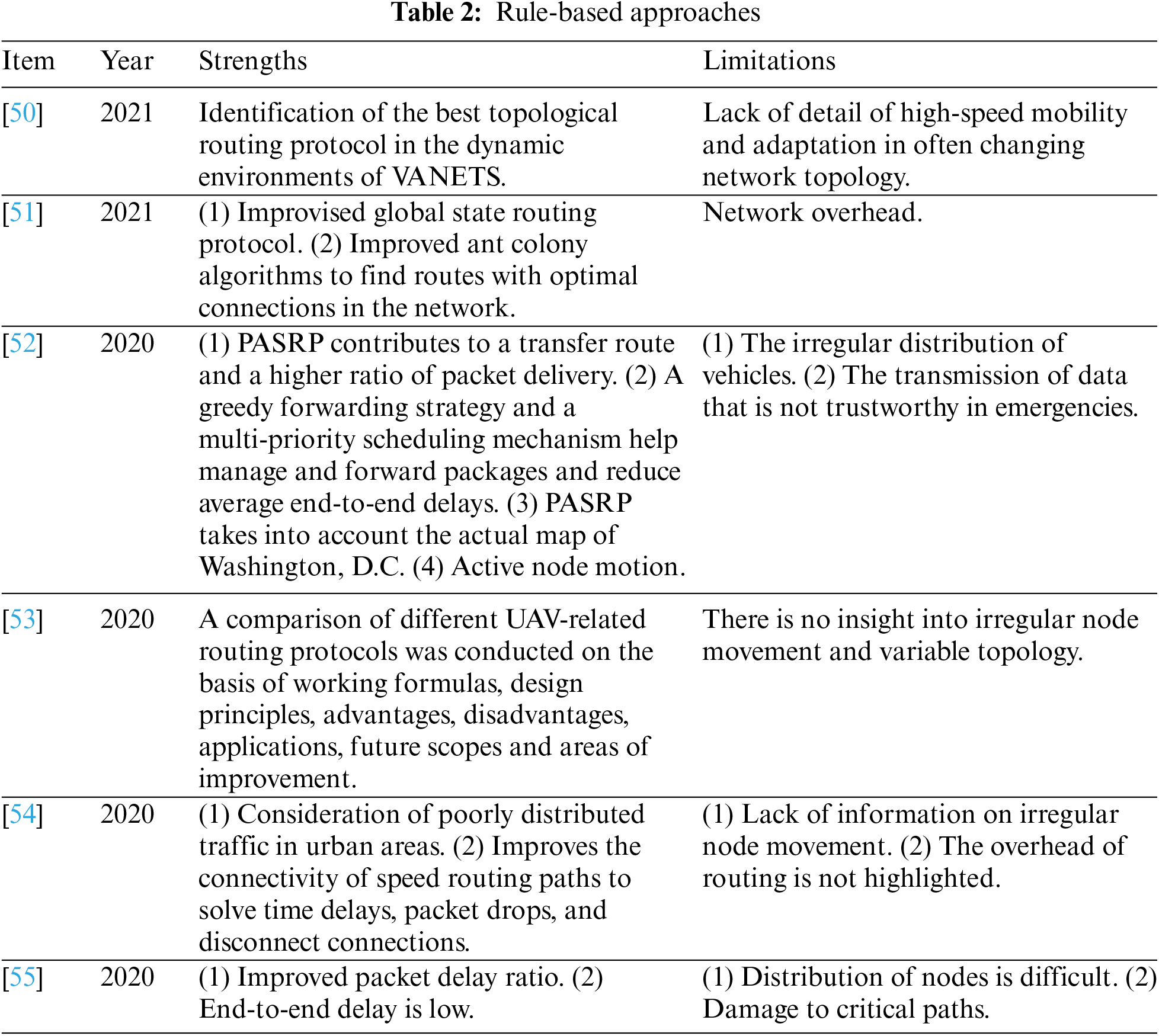
In addition, reference [48] claimed that rule-based systems can also operate on expert knowledge and can have single or multiple data inputs and outputs. These systems use Boolean logic, probabilistic logic, and fuzzy logic to generate and update these rules [48]. In transport, rule-based systems can aggregate data from multiple sensors and use them to predict traffic demand and congestion times. In this way, vehicles can generate routes and communicate with each other depending on the rules guiding traffic in certain areas. Further, reference [49] argued that rule-based systems can reduce human error when driving. Accidents occur due to distraction, obstruction, poor judgment, and lack of action. These conditions can be implemented into rule-based systems that can compute accident and near-accident scenarios that result from human errors and their contributing factors. These systems can then generate rules that optimize the driving process by alerting drivers when obstructions, bends, busy junctions and reckless driving are detected. Table 2 illustrates the strengths and limitations of recent rule-based approaches.
4.2 Optimization-Based Systems
Transport in urban areas experiences complex control problems owing to the high vehicle density. In [56], the challenges of controlling traffic can be solved using bi-level optimization-based systems. In this setup, the flow of traffic can be controlled by minimizing the number of vehicles queuing up at traffic lights. The system calculates the optimal level using traffic lights, the duration of the light cycle, and the offset of the green color in the neighboring traffic lights. Accordingly, the system can determine the optimal time to change the lights and reduce the number of vehicles queuing. In addition, reference [57] proposed an optimal scheduling system that uses real-time GPS data to determine the travel time among clusters. These systems can be used to manage transport buses that operate at different times. The vehicle turnover can be optimized by collecting data on travel ties, station layovers, headways, and operating costs to create an optimal schedule.
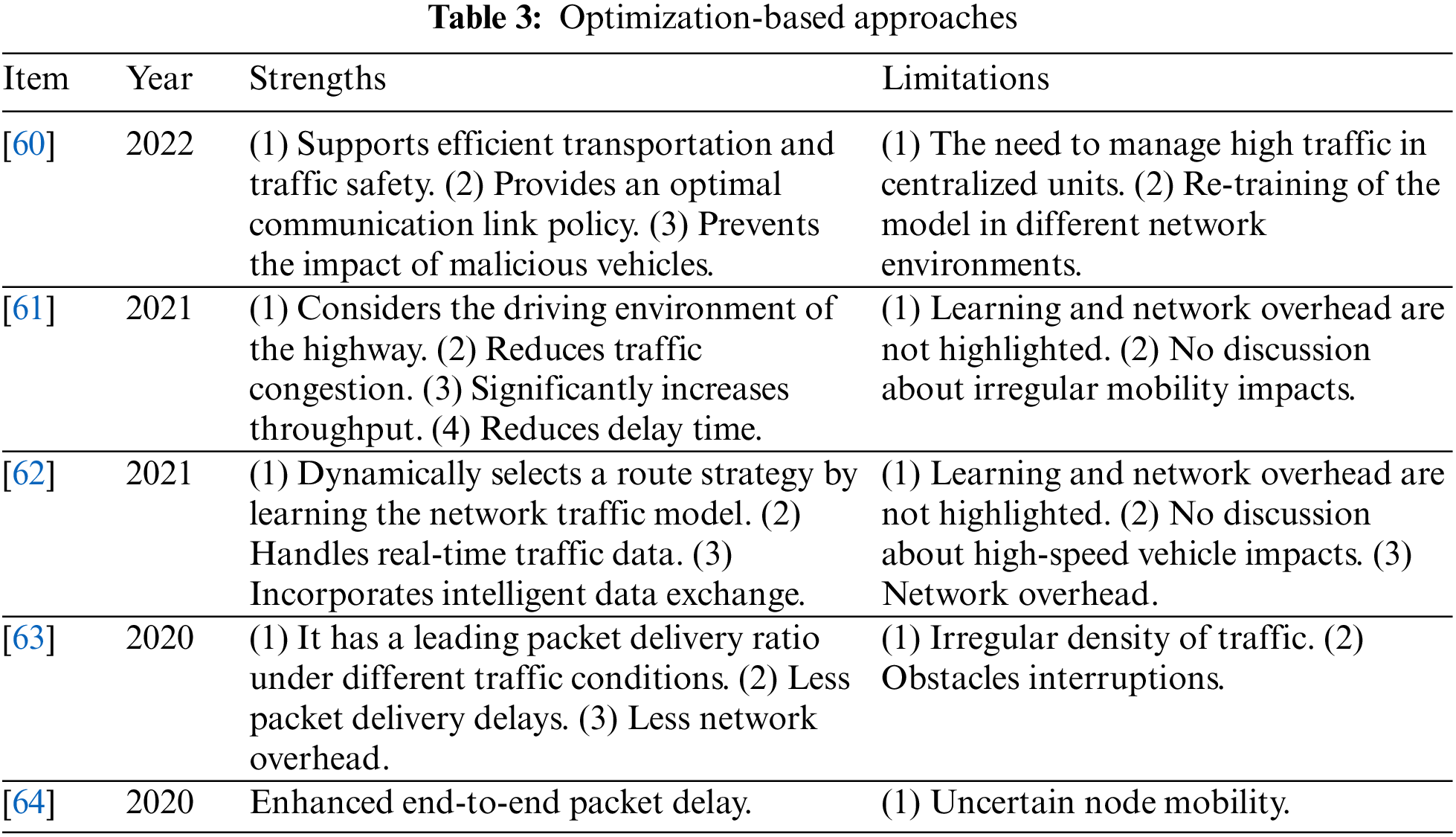
In urban areas, traffic congestion occurs in different patterns depending on the time of the day. Reference [58] proposed segmenting urban areas into clusters that create heterogeneous networks that can be used to predict congestion patterns. Real-time traffic control systems can be optimized by continuously altering the size of clusters as the number of vehicles increases. Optimal traffic flow also depends on the placement of ITS equipment along highways. According to [59], equipment such as closed-circuit videos must be optimally placed to maximize their coverage area. Due to budget constraints, ITS equipment must be placed in such a way that every area is fully covered, and these devices can collect data that are needed for controlling traffic. Therefore, networks deployed to collect data and help control traffic should be optimally distributed to increase their coverage and avoid blind spots that can affect the coordination of vehicles along highways. Optimal placement is particularly important in urban areas where tall buildings can hinder visibility and signal transmission. Table 3 shows the strengths and limitations of recent optimization-based approaches.
5 Flexible Coordination Strategy for Vehicles
The simulation used vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication strategies. In the V2V strategy, vehicles are expected to collect data and transmit them to neighboring cars. Hence, vehicle1 would detect the accident and roadwork and send this information to vehicle2 and the ambulance to alert the drivers of the incidents on the road. The vehicles were also transmitted to other nodes (vehicles) along the highways. In V2V communication, vehicles rely on onboard sensors to collect this data and send it to other vehicles. Therefore, there was no need for cloudlets to process data because of the simplicity of the information picked and relayed by these sensors. This type of communication was facilitated by sensors and wireless transceivers attached to the vehicles. However, this information is only available to vehicles within a small radius because the transmission does not use large area networks (LANs) to communicate with nodes over long distances.
The simulation also used V2I communication, where sensors on vehicles send data to roadside units, traffic lights, cloudlets, and other systems in the infrastructure. V2I communication extends the broadcast for these messages because it extends the transmission range of an individual vehicle. Therefore, the vehicles and ambulances used in the simulation could communicate with other nodes over long distances by relaying the messages through the infrastructure. V2I was also used to detect the speed and type of vehicles and warn them to adjust as they approached the accident scene. On-board equipment collects the information and transfers it to RSUs, which then relay it to other vehicles using wireless networks to other nodes. The RSU also prioritized these messages by broadcasting accident warnings over roadwork information. The intelligence system can prioritize sending important messages over other forms of communication.
5.1 Coordination Design for Vehicles
Based on the ITS station reference design, communication between the neighboring vehicles was achieved through V2V messaging, and the information was relayed and stored in the local dynamic map (LDM), as proposed by various researchers [65,66]. LDM was specified within the facilities layer and provided common features shared by numerous applications for different tasks, as defined. The LDM is crucial in this simulation because it supports different ITS applications by obtaining information on vehicles compromising traffic, including but not limited to dynamic data, such as roadside units, traffic conditions, vehicles, and the presence of obstructions or accidents.
V2V messaging updates the LDM data that enable neighboring connected test vehicles to be aware of each other’s presence, especially when they are out of sight, due to a spiraling road or obstruction. Fig. 1 illustrates an example in which the LDM relays accurate information to vehicles approaching an intersection. In Fig. 1, the layer beneath indicates the physical space where roads, pedestrians, and vehicles are located, while a parallel upper layer was designed to represent the cyberspace containing networked computers computing, storing, and maintaining data ready to be shared and exchanged by other vehicles to ensure an efficient public transport system, although this was at a simulation level. Within the ITS station structure, the digital data received as Comparative Awareness Messages (CAMs) through the V2V communication model are relayed to the LDM, where it is stored. The process of transmitting information from a vehicle to an LDM is termed V2I.

Figure 1: V2V and LDM messaging LDM messaging represent vehicle-to-infrastructure communication [66]. Vehicle 1 was alerted through the driver assistance alerting system of other vehicles on the other side of the building. If the LDM sends accurate data or information that the vehicle is moving in the collision course with a vehicle at an intersection or a vehicle with an accident, it has to stop
All the scenarios assured that cyber-physical systems were working as intended, that V2V messages were successfully transmitted to the target vehicles, and that the makeshift LDM was kept updated about the environment. However, in the real physical world, physical space information is not always correctly projected into cyberspace. The physical projection issues involved in cyberspace using V2V include the following:
All vehicles must be equipped with sender-side V2V features to detect vehicles using the V2V messaging protocol. In this respect, the penetration of V2V communication is essential for ensuring cooperative ITS. It is noteworthy that the US NHTSA conducted studies on the likelihood of enforcing regulations requiring all new light vehicles to be equipped with V2V devices [67]. Regardless of the level of this enforcement, older vehicles will still lack V2V devices, and in such a situation, there would be a mixed environment where legacy vehicles would operate along with V2V-enabled ones. Legacy vehicles will bring challenges in achieving an efficient transport system in terms of safety. Apart from legacy vehicles, it is important for cooperative ITS to consider bicycles and pedestrians, as they are not connected to V2V communication. Thus, it was assumed that V2V communication ignores non-V2V conscious nodes, and their presence is also not detected in cyberspace through V2I messaging. Consideration of non-V2V conscious nodes implies that V2V messaging systems can adapt to mixed environments, which would enable coexistence between non-conscious nodes and V2V-enabled vehicles.
5.1.2 Obstacles and Interference
V2V devices broadcast messaging over ITS-based media (760 MHz or ITS-5G) within a single-hop distance. Obstacles between nodes may interfere with V2V message delivery, which may include hills, bridges, buildings, tunnels, and heavy-load vehicles. In such a scenario, the target vehicles would not receive V2V messages and real-time physical information would not be accurately reflected in cyberspace. In Fig. 1, Vehicle 1, which is the V2V receiver, is not aware of the presence of other vehicles or does not have up-to-date information. Such a situation requires solutions to ensure that real-time information is delivered to the target vehicles.
V2V communication is limited to a certain distance because it uses wireless radio for the propagation of the right messages. The estimated range is between 500 m and 1 km while using ITS-5G in a perfect environment, but the range diminishes in out-of-sight scenarios.
The information is propagated to cyberspace in the form of V2V messages. Even when V2V systems use public key infrastructure, they are still susceptible to malfunctions of sender vehicles, as incorrect data, such as time, speed, and position, would be received by the target vehicles. The issue of malfunctioning is important o for detecting incorrect physical information in V2V communication exchange processes.
The identified issues of obstacle interference and mixed environments can be solved through the proposed V2V-enabled RSUs known as Proxy CAM, which complies with European Union V2V message standards. These standards are easily adapted to the US standards using BSM V2V message formats. With some modifications, the plan is a potential solution to other issues associated with failed V2V messaging.
Fig. 2 provides a typical design for a Proxy CAM system in which roadside sensors can detect a vehicle’s information, such as velocity, acceleration, and position. This information is sent to the system infrastructure server database, which in turn generates CAMS and broadcasts it to the V2V-enabled vehicles that store it in their respective LDMs. These can be shared with other vehicles to avoid possible collisions and prevent further damage in the event of an accident.

Figure 2: Proxy CAM design with three phases: Detection, sensor data to the database, and proxy CAM transmission
The RSUs can be designed to enable proxy V2V messaging and solve issues related to obstacle interference, mixed environments, and malicious messages. Fig. 3 shows the proposed proxy CAM RSU system. RSUs are installed at equidistant locations with each unit capable of detecting objects, such as bicycles, pedestrians, and vehicles in the target areas through sensors and wireless receivers. The real-time data of the objects are stored in a database for processing the data by making comparisons between the data in the sensor and the received data via V2V messaging. Upon completion of data processing, the RSU advertises the received proxy V2V information over ITS-enabled media and shares dynamic information (keeps on changing with time) with the target area. The dynamic information is then delivered through a remote proxy using a cellular network of the cloud infrastructure. The receiver V2V-enabled vehicle receives the information through a combination of remote and V2V messaging.
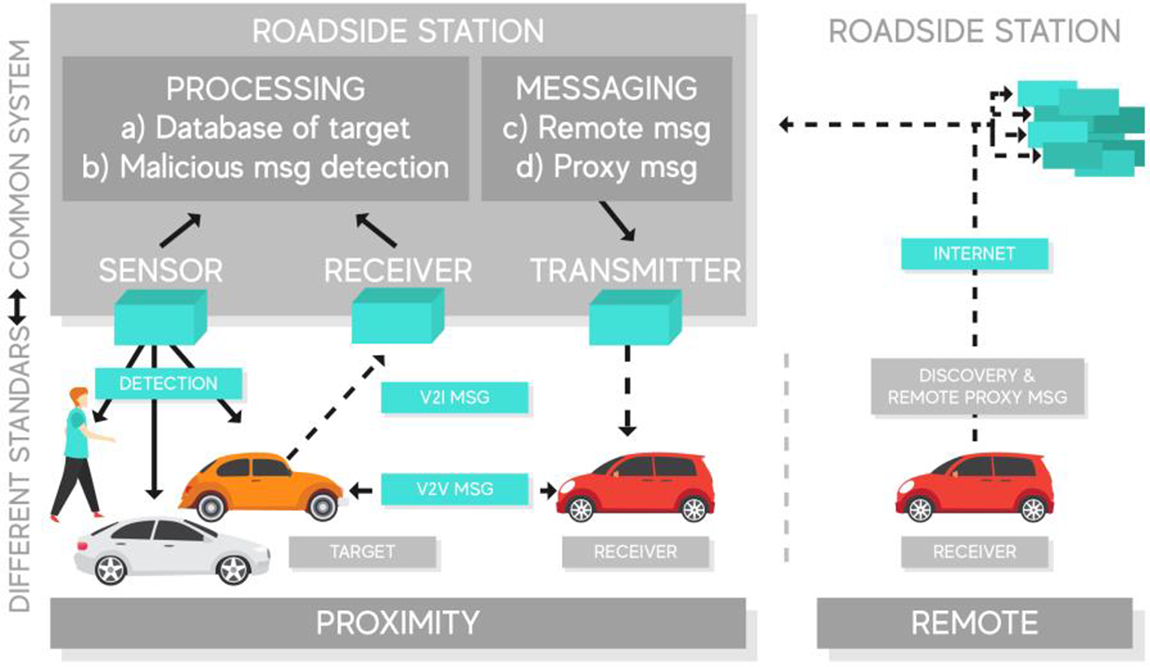
Figure 3: RSU proxy V2V messaging
The methodology for performing the simulation was designed to estimate the collision probability. The amount of time to collision [68] measures the seriousness of conflicting road events and the probability of collision from such a conflict. The lower the time to collision, the higher the collision probability. There were two proposed times for collision, TTC: crossing and rear-end collision. In this simulation case, considering the crossing collision, vehicles remain in their lane and are not allowed to make a turn. To better predict the time to collision, a transformed coefficient collision probability indicator (CPI) [68] was introduced to describe the likelihood of collision between two vehicles in the collision path. However, collisions involving three or more vehicles were not considered in this simulation. The collision probability can be estimated as:
From Eq. (1),
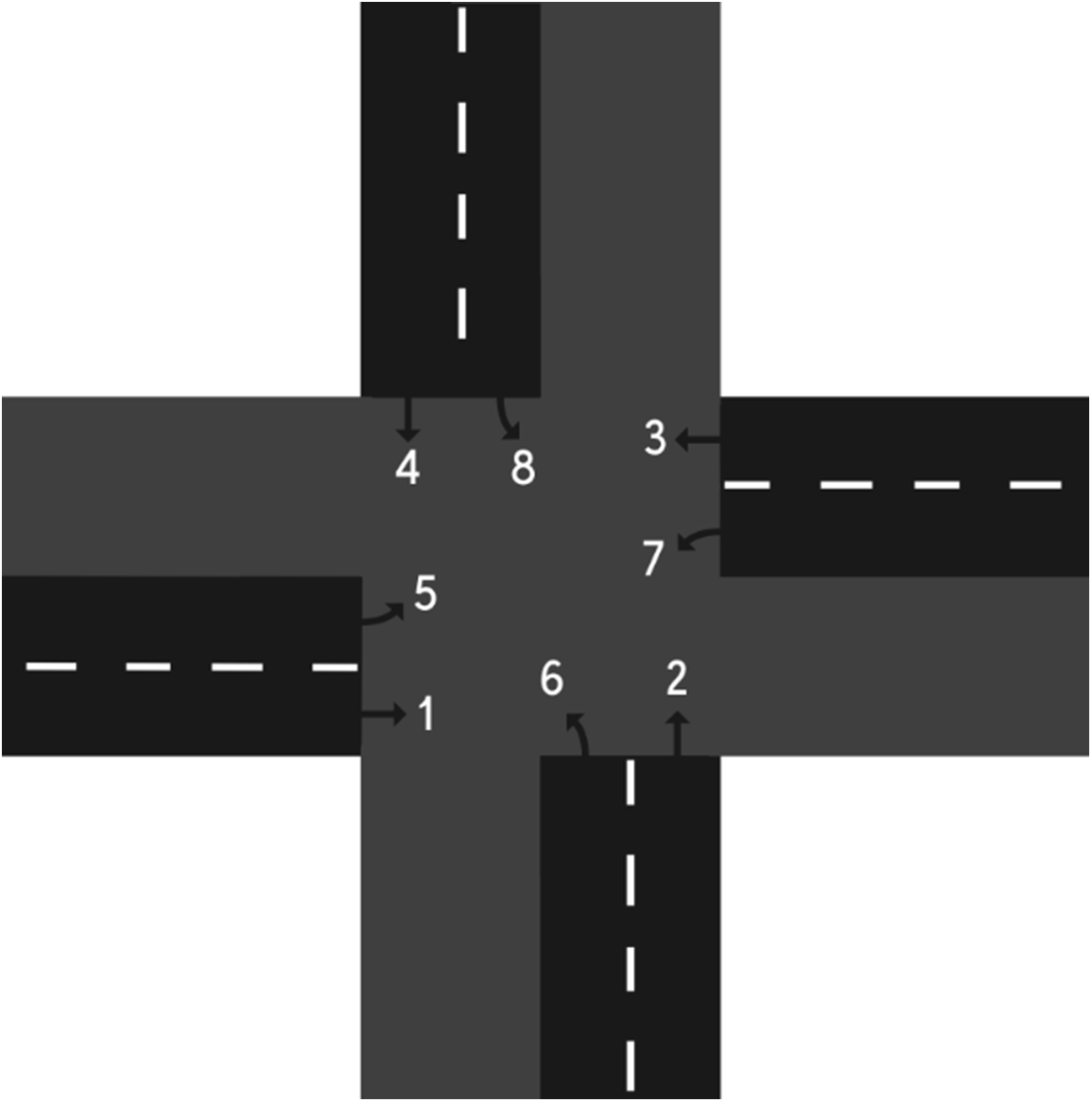
Figure 4: The phase intersection diagram
In the simulation, an enhanced estimation of vehicle collision probability at an intersection was proposed based on the collision probability algorithm developed by [69] through a probabilistic model for vehicle trajectories. The vehicle dynamics were expressed as the previous location (x, y), acceleration a, heading angle
Eqs. (3) and (4) can be described as follows: Original state conditions: current time and the trajectory of a vehicle are represented
Eqs. (5) and (6) can describe minimum headway as follows: the expression is created by two consecutive vehicles:
where:
i, j = phase number indices, p = total phase numbers, k, l = lane identifier, coll (Xm, Xn) = collision function, f (Xm, Xn) = trajectory probability, Nik, Njl = number of vehicles in lanes k and l, Li, Lj = a total number of lanes, R = radius of curvature of the vehicle’s trajectory, S = distance between vehicle i and vehicle i + 1 on the same lane at time
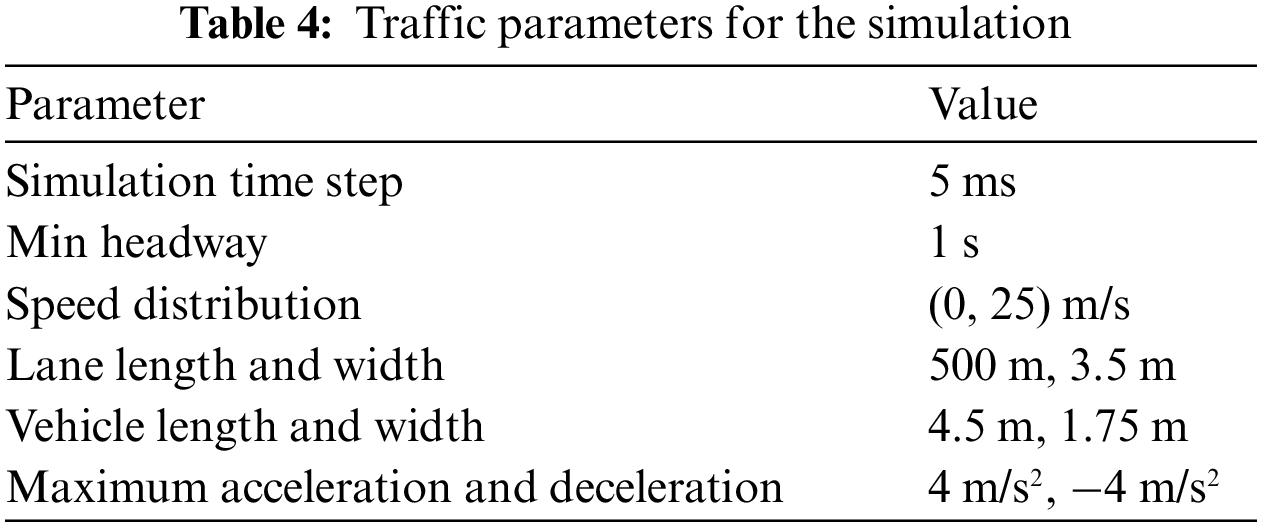
The simulation focused on a secluded urban intersection with just one lane in all four directions without an allowance for turning motions. The simulation validated and evaluated the feasibility of the proposed algorithm. It is noteworthy that the algorithm was originally tailored for general intersections with turning movements, multiple lanes, and roundabouts. The safety issues were communicated through a wireless dedicated short-range communication system using V2V and V2I messaging. The information gathered was sent to the MAC for computing the collision probability based on the received CAMs and BSMs transmitted by other vehicles. Table 4 presents the generated traffic simulation parameters.
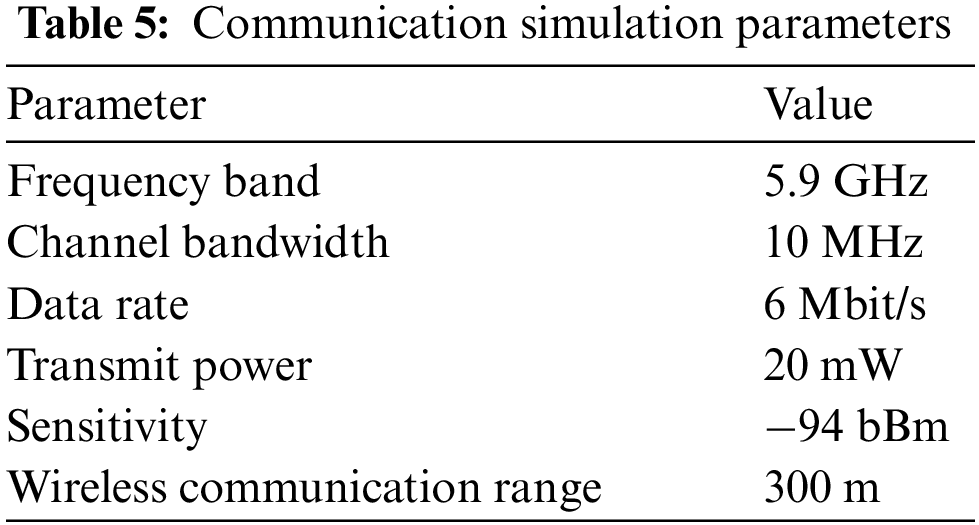
All vehicles in the simulation were equipped with a V2V messaging device for wireless communication with each other. V2V-enabled vehicles with communication range continuously monitor beaconing messages, generating dynamic information that was used to determine collision probability. As soon as a new V2V-enabled vehicle successfully received the beaconing message and answered it, the vehicle was registered as a mobile node and given a unique address for communicating with vehicles based on the IP-based VANET. Considering the presence of transmission delay, V2V-enabled vehicles had a relatively higher computational ability, performing a series of optimization processes to capture optimal acceleration rates, velocity, instantaneous location, and headway angle, as indicated in Table 5.
The simulation was carried out in two phases: the first phase involved V2V communication and the second involved the combination of V2V and V2I data transmission. In these two scenarios, a traffic accident occurred after the150 s of simulation, and the total simulation time was 1800 s. Figs. 5 and 6 illustrate the end-to-end delay data obtained from this simulation.
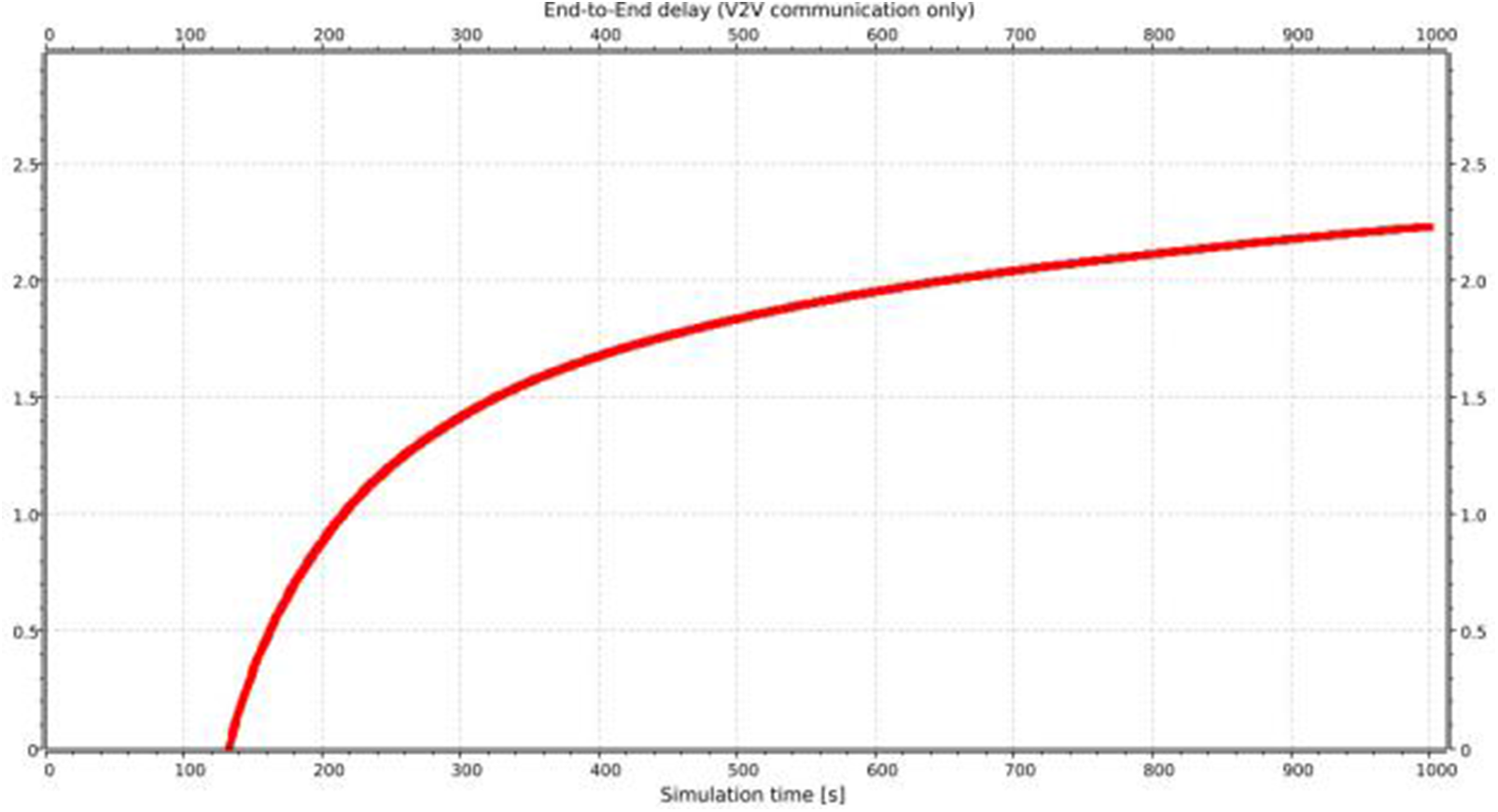
Figure 5: End-to-end delay for only V2V messaging
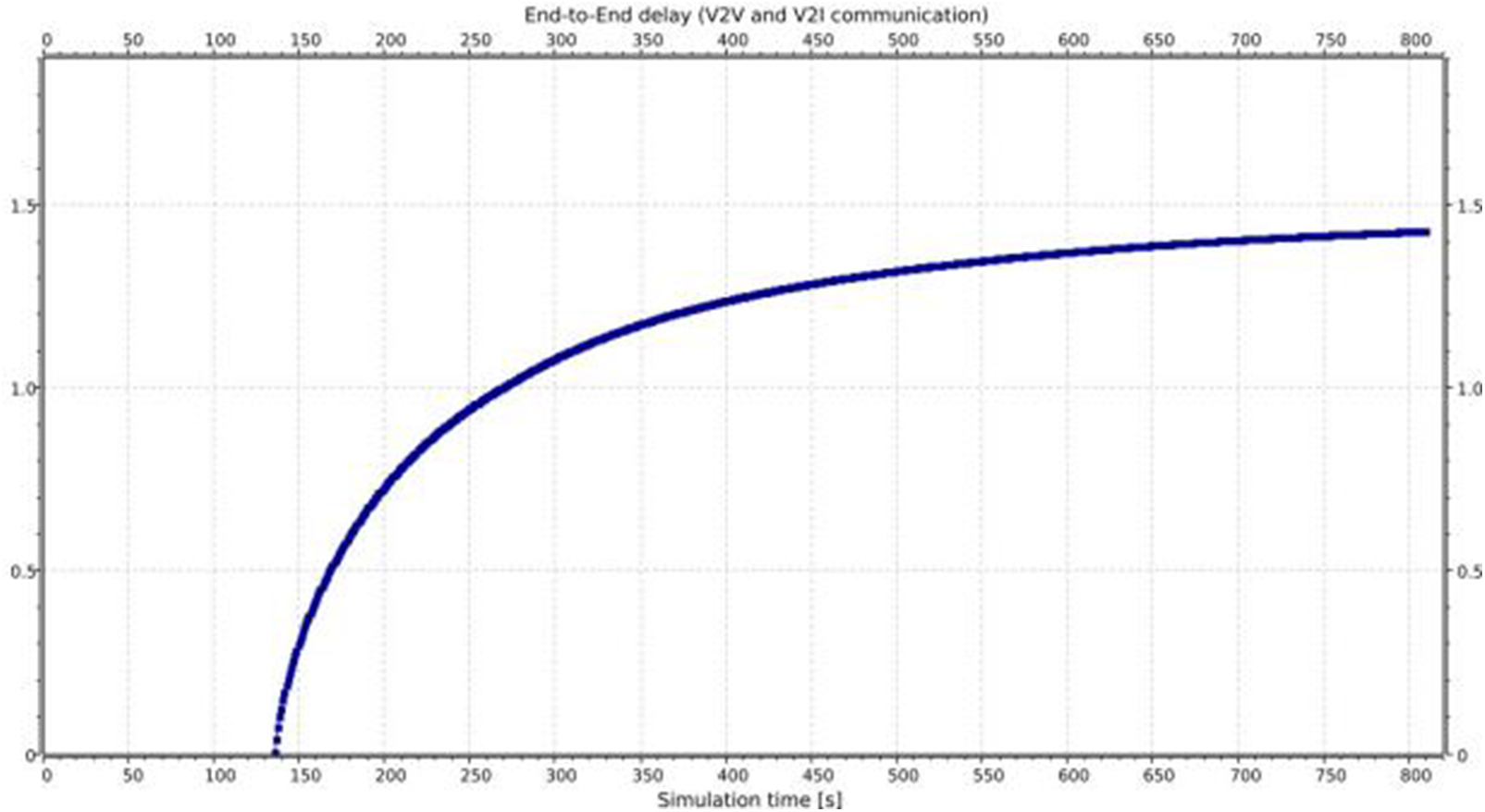
Figure 6: End-to-end delay for both V2V and V2I messaging
The simulation performance was evaluated using a software platform traffic simulator SUMO [70]. The simulation platform was developed to simulate and record the interactions and performance of arbitrary simulation trials for vehicle models passing through an RSU near the intersection involving just one lane from all four directions, to quickly prototype an efficient transport system using real-time data. The simulation platform was created using C++ and OpenGL, coupled with parallel computation Intel Thread Building Blocks designed on multi-core processors. The simulation platform is shown in Fig. 7. All simulation objects were modeled using hybrid simulation techniques, where differential equations and controller actions were used to describe the continuous and discrete behavioral elements of the simulation objects, respectively. The simulation platform has several user interfaces categorized into different multiple panes: visualization, object explorer, global parameter control, console, object parameter control, and state table. The visualization interface allowed the user to view the simulation conditions using 3D graphic models. For instance, if the user selects a vehicle object, they can see elaborate details such as location, speed, acceleration, and headway angle.
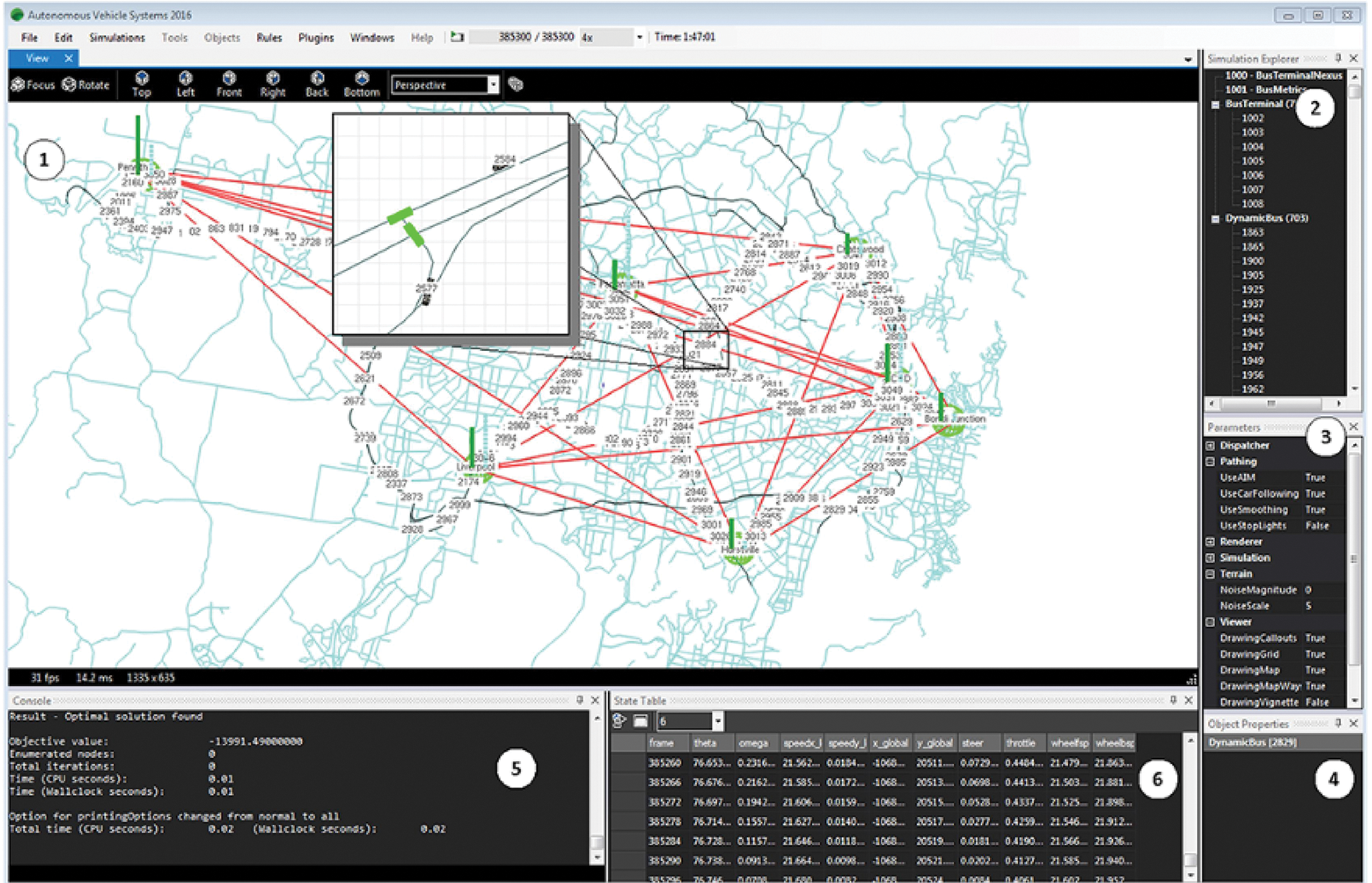
Figure 7: Simulation software with mapping tools for indicating the data captured in all RSUs and the output of the performance data based on traffic and communication baseline parameters
The object explorer allowed the user to select simulation objects that would be shown in the visualization pane. The global parameter control pane allows the user to change or modify global platform parameters for traffic and communication, dispatching collision probability, and redefining intersection negotiation rules. The console pane displays informational and debugging text and allows users to adjust simulation parameters in an interactive manner using a command line window. Finally, the state table pane was used to display the current and past simulation conditions for the selected vehicle objects: velocity, acceleration, location, heading angle, and probability of collision.
The simulation platform was coupled to the Network Simulator (ns2), which served as the wireless ad hoc network, which could be used in the physical world. ns2 is prevalent in the ad-hoc mobile network community, as it offers extensions that are up-to-date and accurate models [71]. The wireless interface of ns2 was tuned based on probabilistic radio wave transmission and the IEEE 802.11p draft. Although the focus of the implementation of the simulation was on these simulators, it is essential to state that the framework used in this case was not limited to special networks and road traffic simulators.
During the simulation run, the traffic simulator, which acted as a server, was first turned on. The traffic simulator provided two extra command-line parameters for operating it in the traffic control interface (TraCI)-server mode that allows to retrieve values of simulated objects and to manipulate their behavior “online”.
– penetration <float> defines the ratio of vehicles from 0 to 1, which has a radio interface. The default value is 1.
– port <int> activates the server ports on which the traffic simulator listens to the incoming connections. After the server port is set, the simulation step command triggers the simulation.
For ns2, the TCL script is used to set up the TraCI-Client, together with the configuration of the network scenario. Several codes instantiate a TraCI-client object that connects to a TraCI-Server. Through set-remotePort and set-remoteHost, there is a successful specification of the TraCI-Server connection. The connection is followed by a time interval created to call the simulation step, and the startSimStepHandler triggers the command.
For a one-hour transportation simulation with at least 850 vehicles, approximately 9 GB of compressed binary data was produced from 30 min of CPU time.
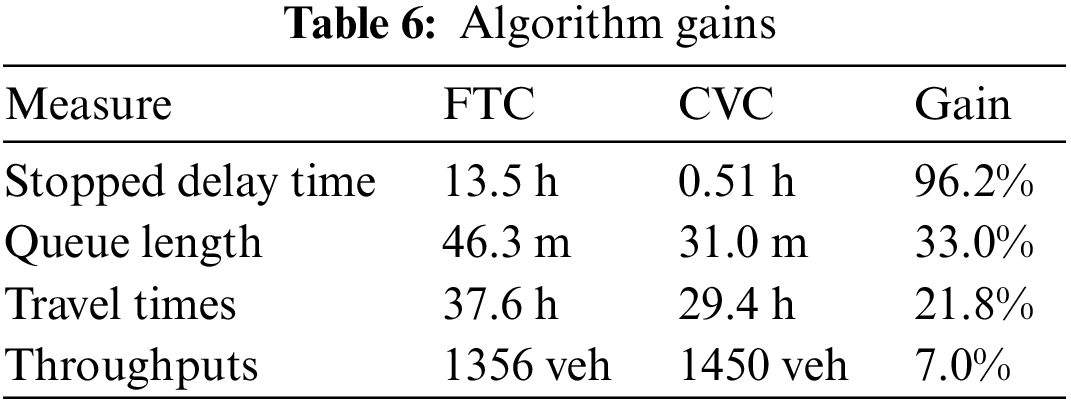
Table 6 summarizes the performance gains obtained using the proposed communication algorithms. The algorithms were able to substantially minimize the overall delay time and mean queue lengths, leading to 96.2% and 33% improvements, respectively. Additionally, the overall travel time was enhanced by 21.8%. Such a significant improvement may result in better intersection improvement and a reduced probability of collision. The number of vehicles passing through an intersection also increased by 7%. The algorithms helped to avoid collisions by alerting the vehicle to adjust the acceleration concerning other vehicles.
Traffic management can be significantly improved by incorporating advanced intelligent transportation systems that could provide various benefits to road transportation, including preventing and responding to accidents. In this regard, vehicular communications play a critical role in ensuring the reliable and timely delivery of messages. Vehicle routing becomes a challenging problem due to constant mobility, frequent changes in topology, intermittent network connectivity, and unbounded network size. Increasing the efficiency of coordination among transportation objects would help ensure that vehicles constantly interact with each other to report accrued events and make better decisions that increase transportation efficiency. This paper highlights VANET challenges and proposes an event simulation algorithm that improves the average time of road transportation trips. Optimal integration of V2V and V2I messages appears to yield better results in terms of end-to-end delay and information spread time than just using V2V or V2I messaging. Several areas need to be investigated to ensure safety in the transportation sectors, including the prediction of road conditions, weather forecasts, accident prevention, driving habits, and optimal route detection. To cope with different network conditions in VANET, the scaling and calculation complexity of routing mechanisms should be further investigated, especially in high-priority and emergency messages. This could lead to improving traffic flow on roads, especially traffic lights, roundabouts, intersections, etc. Designing mechanisms and approaches to integrate 5G and 6G features will improve network functions and performance, enabling more efficient coordination of vehicular nodes to maximize road transportation efficiency.
Acknowledgement: The author is very thankful to all associated personnel in any capacity that contributed to the purpose of this research.
Funding Statement: The author would like to thank the Deanship of Scientific Research at Majmaah University for supporting this work under Project Number No. R-2023-413.
Author Contributions: Study conception and design: Abdullah Alsaleh; data collection: Abdullah Alsaleh; analysis and interpretation of results: Abdullah Alsaleh; draft manuscript preparation: Abdullah Alsaleh. The author reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The datasets used and analyzed during the current study are available from the corresponding author upon reasonable request.
Conflicts of Interest: The author declares that he has no conflicts of interest to report on the present study.
References
1. G. Dimitrakopoulos and P. Demestichas, “Intelligent transportation systems,” IEEE Vehicular Technology Magazine, vol. 5, no. 1, pp. 77–84, 2010. https://doi.org/10.1109/MVT.2009.935537 [Google Scholar] [CrossRef]
2. A. D. Joseph, A. R. Beresford, J. Bacon, D. N. Cottingham, J. J. Davies et al., “Intelligent transportation systems,” IEEE Pervasive Computing, vol. 5, no. 4, pp. 63–67, 2006. https://doi.org/10.1109/MPRV.2006.77 [Google Scholar] [CrossRef]
3. A. Balasubramaniam, A. Paul, W. H. Hong, H. Seo and J. H. Kim, “Comparative analysis of intelligent transportation systems for sustainable environment in smart cities,” Sustainability, vol. 9, no. 7, pp. 1120, 2017. https://doi.org/10.3390/su9071120 [Google Scholar] [CrossRef]
4. F. Yang, S. Wang, J. Li, Z. Liu and Q. Sun, “An overview of internet of vehicles,” Communications China, vol. 11, pp. 1–15, 2014. https://doi.org/10.1109/CC.2014.6969789 [Google Scholar] [CrossRef]
5. M. Torrent-Moreno, J. Mittag, P. Santi and H. Hartenstein, “Vehicle-to-vehicle communication: Fair transmit power control for safety-critical information,” IEEE Transactions on Vehicular Technology, vol. 58, no. 7, pp. 3684–3703, 2009. https://doi.org/10.1109/TVT.2009.2017545 [Google Scholar] [CrossRef]
6. S. Biswas, R. Tatchikou and F. Dion, “Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety,” IEEE Communications Magazine, vol. 44, no. 1, pp. 74–82, 2006. https://doi.org/10.1109/MCOM.2006.1580935 [Google Scholar] [CrossRef]
7. A. Bohm and M. Jonsson, “Supporting real-time data traffic in safety-critical vehicle-to-infrastructure communication,” in 33rd IEEE Conf. on Local Computer Networks (LCN), Montreal, QC, Canada, pp. 614–621, 2008. https://doi.org/10.1109/LCN.2008.4664253 [Google Scholar] [CrossRef]
8. C. Cai, Y. Wang and G. Geers, “Adaptive traffic signal control using vehicle-to-infrastructure communication: A technical note,” in Proc. of the Second Int. Workshop on Computational Transportation Science, San Jose, CA, USA, pp. 43–47, 2010. https://doi.org/10.1145/1899441.1899453 [Google Scholar] [CrossRef]
9. C. N. Van Phu, N. Farhi, H. Haj-Salem and J. -P. Lebacque, “A vehicle-to-infrastructure communication based algorithm for urban traffic control,” in 5th IEEE Int. Conf. on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, pp. 651–656, 2017. https://doi.org/10.1109/MTITS.2017.8005594 [Google Scholar] [CrossRef]
10. M. Abuelela, S. Olariu and G. Yan, “Enhancing automatic incident detection techniques through vehicle to infrastructure communication,” in 11th Int. IEEE Conf. on Intelligent Transportation Systems, Beijing, China, pp. 447–452, 2008. https://doi.org/10.1109/ITSC.2008.4732687 [Google Scholar] [CrossRef]
11. F. Bai and H. Krishnan, “Reliability analysis of DSRC wireless communication for vehicle safety applications,” in IEEE Intelligent Transportation Systems Conf., Toronto, ON, Canada, pp. 355–362, 2006. https://doi.org/10.1109/ITSC.2006.1706767 [Google Scholar] [CrossRef]
12. E. C. Eze, S. Zhang and E. Liu, “Vehicular ad hoc networks (VANETsCurrent state, challenges, potentials and way forward,” in 20th Int. Conf. on Automation and Computing, Cranfield, UK, pp. 176–181, 2014. https://doi.org/10.1109/IConAC.2014.6935482 [Google Scholar] [CrossRef]
13. K. D. Singh, P. Rawat and J. M. Bonnin, “Cognitive radio for vehicular ad hoc networks (CR-VANETsApproaches and challenges,” EURASIP Journal on Wireless Communications and Networking, vol. 49, no. 1, pp. 1, 2014. https://doi.org/10.1186/1687-1499-2014-49 [Google Scholar] [CrossRef]
14. Z. Ahmed, K. H. Bilal and M. Alhassan, “Cognitive radio network review,” International Journal of Engineering, Applied and Management Sciences Paradigms, vol. 35, pp. 19–26, 2016. [Online]. Available: https://www.researchgate.net/publication/317090863_Cognitive_Radio_Network_Review [Google Scholar]
15. F. Cunha, L. Villas, A. Boukerche, G. Maia, A. Viana et al., “Data communication in VANETs: Protocols, applications and challenges,” Ad Hoc Networks, vol. 44, pp. 90–103, 2016. https://doi.org/10.1016/j.adhoc.2016.02.017 [Google Scholar] [CrossRef]
16. S. Yousefi, M. S. Mousavi and M. Fathy, “Vehicular ad hoc networks (VANETsChallenges and perspectives,” in 6th Int. Conf. on ITS Telecommunications, Chengdu, China, pp. 761–766, 2006. https://doi.org/10.1109/ITST.2006.289012 [Google Scholar] [CrossRef]
17. W. Liang, Z. Li, H. Zhang, S. Wang and R. Bie, “Vehicular ad hoc networks: Architectures, research issues, methodologies, challenges, and trends,” International Journal of Distributed Sensor Networks, vol. 11, no. 8, pp. 745303, 2015. https://doi.org/10.1155/2015/745303 [Google Scholar] [CrossRef]
18. S. N. Mohammad, M. J. Ashraf, S. Wasiq, S. Iqbal and N. Javaid, “Analysis and modeling of network connectivity in routing protocols for MANETs and VANETs,” in Eighth Int. Conf. on Broadband and Wireless Computing, Communication and Applications, Compiegne, France, pp. 528–533, 2013. https://doi.org/10.1109/BWCCA.2013.91 [Google Scholar] [CrossRef]
19. S. Singh and S. Agrawal, “VANET routing protocols: Issues and challenges,” in Recent Advances in Engineering and Computational Sciences (RAECS), Chandigarh, India, pp. 1–5, 2014. https://doi.org/10.1109/RAECS.2014.6799625 [Google Scholar] [CrossRef]
20. M. Sivasakthi and R. Suresh, “Research on vehicular ad hoc networks (VANETsAn overview,” International Journal of Applied Science and Engineering Research, vol. 2, no. 1, pp. 23–27, 2013. https://doi.org/10.6088/ijaser.020100003 [Google Scholar] [CrossRef]
21. V. Verma, D. Gupta, S. Gupta, M. Uppal, D. Anand et al., “A deep learning-based intelligent garbage detection system using an unmanned aerial vehicle,” Symmetry, vol. 14, no. 5, pp. 960, 2022. https://doi.org/10.3390/sym14050960 [Google Scholar] [CrossRef]
22. A. Mchergui, T. Moulahi and S. Zeadally, “Survey on artificial intelligence (AI) techniques for vehicular ad-hoc networks (VANETs),” Vehicular Communications, vol. 34, pp. 100403, 2022. https://doi.org/10.1016/j.vehcom.2021.100403 [Google Scholar] [CrossRef]
23. R. Chauhan, N. Goyal and R. Kumar, “A review on tuning of OLSR routing protocol in VANET,” International Journal of Aquatic Research and Education, vol. 2, pp. 2395–4396, 2016. [Online]. Available: https://www.researchgate.net/publication/304742278_A_Review_on_Tuning_Of_OLSR_Routing_Protocol_IN_VANET [Google Scholar]
24. A. Md, D. Agrawal, M. Mehta, A. Sivaraman, K. Tee et al., “Time optimization of unmanned aerial vehicles using an augmented path,” Future Internet, vol. 13, no. 12, pp. 308, 2021. https://doi.org/10.3390/fi13120308 [Google Scholar] [CrossRef]
25. J. A. Guerrero-ibanez, S. Zeadally and J. Contreras-Castillo, “Integration challenges of intelligent transportation systems with connected vehicle, cloud computing, and internet of things technologies,” IEEE Wireless Communications, vol. 22, no. 6, pp. 122–128, 2015. https://doi.org/10.1109/MWC.2015.7368833 [Google Scholar] [CrossRef]
26. F. Camacho, C. Cárdenas and D. Muñoz, “Emerging technologies and research challenges for intelligent transportation systems: 5G, HetNets, and SDN,” International Journal on Interactive Design and Manufacturing (IJIDeM), vol. 12, no. 1, pp. 327–335, 2018. https://doi.org/10.1007/s12008-017-0391-2 [Google Scholar] [CrossRef]
27. O. Kotevska, A. Lbath and S. Bouzefrane, “Toward a real-time framework in cloudlet-based architecture,” Tsinghua Science and Technology, vol. 21, no. 1, pp. 80–88, 2016. https://doi.org/10.1109/TST.2016.7399285 [Google Scholar] [CrossRef]
28. C. M. Chen, Z. Li, S. Kumari, G. Srivastava, K. Lakshmanna et al., “A provably secure key transfer protocol for the fog-enabled social internet of vehicles based on a confidential computing environment,” Vehicular Communications, vol. 39, pp. 100567, 2023. https://doi.org/10.1016/j.vehcom.2022.100567 [Google Scholar] [CrossRef]
29. V. Rajyalakshmi and K. Lakshmanna, “A review on smart city-IoT and deep learning algorithms, challenges,” International Journal of Engineering Systems Modelling and Simulation, vol. 13, no. 1, pp. 3–26, 2022. https://doi.org/10.1504/IJESMS.2022.122733 [Google Scholar] [CrossRef]
30. S. Kumar and V. Singh, “A review of digital signature and hash function based approach for secure routing in VANET,” in Proc. of the Int. Conf. on Artificial Intelligence and Smart Systems (ICAIS), pp. 1301–1305, 2021. https://doi.org/10.1109/ICAIS50930.2021.9395882 [Google Scholar] [CrossRef]
31. I. Rasheed, F. Hu, Y. K. Hong and B. Balasubramanian, “Intelligent vehicle network routing with adaptive 3D beam alignment for mmWave 5G-based V2X communications,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 5, pp. 2706–2718, 2021. https://doi.org/10.1109/TITS.2020.2973859 [Google Scholar] [CrossRef]
32. X. Qu, E. Liu, R. Wang and H. Ma, “Complex network analysis of VANET topology with realistic vehicular traces,” IEEE Transactions on Vehicular Technology, vol. 69, no. 4, pp. 4426–4438, 2020. https://doi.org/10.1109/TVT.2020.2976937 [Google Scholar] [CrossRef]
33. N. Chaib, O. S. Oubbati, M. L. Bensaad, A. Lakas, P. Lorenz et al., “BRT: Bus-based routing technique in urban vehicular networks,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 11, pp. 4550–4562, 2020. https://doi.org/10.1109/TITS.2019.2938871 [Google Scholar] [CrossRef]
34. F. Alrawi, “The importance of intelligent transport systems in the preservation of the environment and reduction of harmful gases,” Transportation Research Procedia, vol. 24, pp. 197–203, 2017. https://doi.org/10.1016/j.trpro.2017.05.108 [Google Scholar] [CrossRef]
35. P. Koopman and M. Wagner, “Challenges in autonomous vehicle testing and validation,” SAE International Journal of Transportation Safety, vol. 4, no. 1, pp. 15–24, 2016. https://doi.org/10.4271/2016-01-0128 [Google Scholar] [CrossRef]
36. J. A. Khan, Y. Ghamri-Doudane and A. El Masri, “Towards the ranking of important smart vehicles in VANETs—An information-centric approach,” in Int. Conf. on Protocol Engineering (ICPE) and Int. Conf. on New Technologies of Distributed Systems (NTDS), Paris, France, pp. 1–6, 2015. https://doi.org/10.1109/NOTERE.2015.7293502 [Google Scholar] [CrossRef]
37. J. Blau, “Smart cars need smart roads,” Research Technology Management, vol. 58, no. 5, pp. 4–6, 2015. http://www.jstor.org/stable/44134509 [Google Scholar]
38. P. Papadimitratos, A. D. La Fortelle, K. Evenssen, R. Brignolo and S. Cosenza, “Vehicular communication systems: Enabling technologies, applications, and future outlook on intelligent transportation,” IEEE Communications Magazine, vol. 47, no. 11, pp. 84–95, 2009. https://doi.org/10.1109/MCOM.2009.5307471 [Google Scholar] [CrossRef]
39. A. Festag, “Cooperative intelligent transport systems standards in Europe,” IEEE Communications Magazine, vol. 52, no. 12, pp. 166–172, 2014. https://doi.org/10.1109/MCOM.2014.6979970 [Google Scholar] [CrossRef]
40. R. Yu, Y. Zhang, S. Gjessing, W. Xia and K. Yang, “Toward cloud-based vehicular networks with efficient resource management,” IEEE Network, vol. 27, no. 5, pp. 48–55, 2013. https://doi.org/10.1109/MNET.2013.6616115 [Google Scholar] [CrossRef]
41. F. J. Martinez, C. K. Toh, J. C. Cano, C. T. Calafate and P. Manzoni, “Emergency services in future intelligent transportation systems based on vehicular communication networks,” IEEE Intelligent Transportation Systems Magazine, vol. 2, no. 2, pp. 6–20, 2010. https://doi.org/10.1109/MITS.2010.938166 [Google Scholar] [CrossRef]
42. K. Selvarajah, B. Arief, A. Tully and P. Blythe, “Deploying wireless sensor devices in intelligent transportation system applications,” Intelligent Transportation Systems, 2012. https://doi.org/10.5772/25993 [Google Scholar] [CrossRef]
43. M. Tubaishat, P. Zhuang, Q. Qi and Y. Shang, “Wireless sensor networks in intelligent transportation systems,” Wireless Communications and Mobile Computing, vol. 9, pp. 287–302, 2009. https://doi.org/10.1002/wcm.616 [Google Scholar] [CrossRef]
44. O. Karpis, “Wireless sensor networks in intelligent transportation systems,” International Journal of Modern Engineering Research (IJMER), vol. 3, no. 2, pp. 2249–6645, 2013. [Online]. Available: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=944de07f78154318b1f8adb2d12b0f6ede097d9e [Google Scholar]
45. P. Olatunbosun, “Wireless sensor networks for intelligent transport systems,” in Proc. of the 12th Research Seminar Series Workshop, Bradford, UK, vol. 10, 2013. [Online]. Available: https://bradscholars.brad.ac.uk/bitstream/handle/10454/5560/RSSProc_2013_final.pdf?sequence=1#page=86 [Google Scholar]
46. E. Magill and J. Blum, “Exploring conflicts in rule-based sensor networks,” Pervasive and Mobile Computing, vol. 27, pp. 133–154, 2016. https://doi.org/10.1016/j.pmcj.2015.08.005 [Google Scholar] [CrossRef]
47. R. Asadi and M. Ghatee, “A rule-based decision support system in intelligent Hazmat transportation system,” IEEE Transactions on Intelligent Transportation Systems, vol. 16, no. 5, pp. 2756–2764, 2015. https://doi.org/10.1109/TITS.2015.2420993 [Google Scholar] [CrossRef]
48. H. Liu, A. Gegov and F. Stahl, “Categorization and construction of rule based systems,” Communications in Computer and Information Science, vol. 459, 2014. https://doi.org/10.1007/978-3-319-11071-4_18 [Google Scholar] [CrossRef]
49. N. A. Stanton and P. M. Salmon, “Human error taxonomies applied to driving: A generic driver error taxonomy and its implications for intelligent transport systems,” Safety Science, vol. 47, no. 2, pp. 227–237, 2009. https://doi.org/10.1016/j.ssci.2008.03.006 [Google Scholar] [CrossRef]
50. M. Rajhi, H. Madkhali and I. Daghriri, “Comparison and analysis performance in topology-based routing protocols in vehicular ad-hoc network (VANET),” in Proc. of the IEEE 11th Annual Computing and Communication Workshop and Conf. (CCWC), pp. 1139–1146, 2021. https://doi.org/10.1109/CCWC51732.2021.9375830 [Google Scholar] [CrossRef]
51. K. Aravindhan, K. Periyakaruppan, K. Balaji, S. Banupriya, S. R. Sankari et al., “Experimental design of VANET routing using enhanced ant colony optimization technique,” in Proc. of the 7th Int. Conf. on Advanced Computing and Communication Systems (ICACCS), vol. 1, pp. 1515–1518, 2021. https://doi.org/10.1109/ICACCS51430.2021.9441969 [Google Scholar] [CrossRef]
52. H. Liu, T. Qiu, X. Zhou, C. Chen and N. Chen, “Parking-area-assisted spider-web routing protocol for emergency data in urban VANET,” IEEE Transactions on Vehicular Technology, vol. 69, no. 1, pp. 971–982, 2020. https://doi.org/10.1109/TVT.2019.2954159 [Google Scholar] [CrossRef]
53. R. A. Nazib and S. Moh, “Routing protocols for unmanned aerial vehicle-aided vehicular ad hoc networks: A survey,” IEEE Access, vol. 8, pp. 77535–77560, 2020. https://doi.org/10.1109/ACCESS.2020.2989790 [Google Scholar] [CrossRef]
54. S. Din, K. N. Qureshi, M. S. Afsar, J. J. P. C. Rodrigues, A. Ahmad et al., “Beaconless traffic-aware geographical routing protocol for intelligent transportation system,” IEEE Access, vol. 8, pp. 187671–187686, 2020. https://doi.org/10.1109/ACCESS.2020.3030982 [Google Scholar] [CrossRef]
55. C. Xu, Z. Xiong, X. Kong, G. Zhao and S. Yu, “A packet reception probability-based reliable routing protocol for 3D VANET,” IEEE Wireless Communications Letters, vol. 9, no. 4, pp. 495–498, 2020. https://doi.org/10.1109/LWC.2019.2960236 [Google Scholar] [CrossRef]
56. K. Stoilova, T. Stoilov and V. Ivanov, “Bi-level optimization as a tool for implementation of intelligent transportation systems,” Cybernetics and Information Technologies, vol. 17, no. 2, pp. 97–105, 2017. https://doi.org/10.1515/cait-2017-0019 [Google Scholar] [CrossRef]
57. Z. C. Xu, P. J. He, J. Teng and L. P. Liu, “Transit vehicles intelligent scheduling optimization based on the division of characteristic periods,” Procedia-Social and Behavioral Sciences, vol. 96, pp. 1502–1512, 2013. https://doi.org/10.1016/j.sbspro.2013.08.171 [Google Scholar] [CrossRef]
58. M. Saeedmanesh and N. Geroliminis, “Optimization-based clustering of traffic networks using distinct local components,” in IEEE 18th Int. Conf. on Intelligent Transportation Systems, Gran Canaria, Spain, pp. 2135–2140, 2015. https://doi.org/10.1109/ITSC.2015.345 [Google Scholar] [CrossRef]
59. S. Srinivas, N. H. Gartner, L. K. Jones, C. Stamatiadis and Y. Xie, “Development of an optimization-based decision support model (DSM) for instrumenting a state highway system, no. 16-1877,” 2016. [Online]. Available: https://trid.trb.org/view/1392680 [Google Scholar]
60. D. Zhang, F. R. Yu, R. Yang and L. Zhu, “Software-defined vehicular networks with trust management: A deep reinforcement learning approach,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 2, pp. 1400–1414, 2022. https://doi.org/10.1109/TITS.2020.3025684 [Google Scholar] [CrossRef]
61. K. Kandali, L. Bennis and H. Bennis, “A new hybrid routing protocol using a modified K-means clustering algorithm and continuous Hopfield network for VANET,” IEEE Access, vol. 9, pp. 47169–47183, 2021. https://doi.org/10.1109/ACCESS.2021.3068074 [Google Scholar] [CrossRef]
62. L. Zhao, W. Zhao, A. Hawbani, A. Y. Al-Dubai, G. Min et al., “Novel online sequential learning-based adaptive routing for edge software-defined vehicular networks,” IEEE Transactions on Wireless Communications, vol. 20, no. 5, pp. 2991–3004, 2021. https://doi.org/10.1109/TWC.2020.3046275 [Google Scholar] [CrossRef]
63. J. Wu, M. Fang, H. Li and X. Li, “RSU-assisted traffic-aware routing based on reinforcement learning for urban VANETs,” IEEE Access, vol. 8, pp. 5733–5748, 2020. https://doi.org/10.1109/ACCESS.2020.2963850 [Google Scholar] [CrossRef]
64. N. Kerkacha, N. HadjSaid, N. Chaib, A. Adnane and A. Ali-Pacha, “A delay sensitive bus-based routing technique for urban vehicular networks,” in Proc. of the 21st Int. Conf. on Communications, Control Systems and Signal Processing (CCSSP), pp. 36–40, 2020. https://doi.org/10.1109/CCSSP49278.2020.9151466 [Google Scholar] [CrossRef]
65. J. Collins, K. Olyai, H. Mkinsi and A. R. Jamond, “Intelligent transport systems–cooperative systems–definition of a global concept for local dynamic maps,” 2018. [Online]. Available: https://www.iso.org/standard/69433.html [Google Scholar]
66. ETSI EN 302 895 V1.1.1, “Intelligent transport systems (ITS); Vehicular communications; Basic set of applications; Local dynamic map (LDM),” 2014. [Online]. Available: EN 302 895-V1.1.1-Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Local Dynamic Map (LDM) (etsi.org) [Google Scholar]
67. J. Harding, G. Powell, R. Yoon, J. Fikentscher, C. Doyle et al., “Vehicle-to-vehicle communications: Readiness of V2V technology for application,” Washington, DC: National Highway Traffic Safety Administration report, U.S. Department of Transportation, National Highway Traffic Safety Administration, 2014. [Online]. Available: https://rosap.ntl.bts.gov/view/dot/27999 [Google Scholar]
68. J. Liu, B. Cai, Y. Wang and J. Wang, “A lane level positioning-based cooperative vehicle conflict resolution algorithm for unsignalized intersection collisions,” Computers & Electrical Engineering, vol. 39, no. 5, pp. 1381–1398, 2013. https://doi.org/10.1016/j.compeleceng.2013.04.011 [Google Scholar] [CrossRef]
69. S. Joerer, M. Segata, B. Bloessl, R. Lo Cigno, C. Sommer et al., “A vehicular networking perspective on estimating vehicle collision probability at intersections,” IEEE Transactions on Vehicular Technology, vol. 63, no. 4, pp. 1802–1812, 2014. https://doi.org/10.1109/TVT.2013.2287343 [Google Scholar] [CrossRef]
70. P. A. Lopez, M. Behrisch, L. B. Walz, J. Erdmann, Y. P. Flötteröd et al., “Microscopic traffic simulation using SUMO,” in 2018 21st Int. Conf. on Intelligent Transportation Systems (ITSC), Maui, HI, USA, pp. 2575–2582, 2018. https://doi.org/10.1109/ITSC.2018.8569938 [Google Scholar] [CrossRef]
71. M. Torrent-Moreno, “Inter-vehicle communications-achieving safety in a distributed wireless environment. Challenges, systems and protocols,” 2007. https://doi.org/10.5445/KSP/1000007058 [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools