
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Enhancing Vehicle Overtaking System via LoRa-Enabled Vehicular Communication Approach
Faculty of Information Science and Technology, Multimedia University, Melaka, 75450, Malaysia
* Corresponding Author: Siti Fatimah Abdul Razak. Email:
Computer Systems Science and Engineering 2025, 49, 239-258. https://doi.org/10.32604/csse.2024.056582
Received 25 July 2024; Accepted 12 September 2024; Issue published 10 January 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Vehicle overtaking poses significant risks and leads to injuries and losses on Malaysia’s roads. In most scenarios, insufficient and untimely information available to drivers for accessing road conditions and their surrounding environment is the primary factor that causes these incidents. To address these issues, a comprehensive system is required to provide real-time assistance to drivers. Building upon our previous research on a LoRa-based lane change decision-aid system, this study proposes an enhanced Vehicle Overtaking System (VOS). This system utilizes long-range (LoRa) communication for reliable real-time data exchange between vehicles (V2V) and the cloud (V2C). By providing drivers with critical information, including surrounding vehicle movements, through visual and audible warnings, the VOS aims to support vehicle overtaking decisions by calculating the safe distance between vehicles as per the Association of State Highway and Transportation Officials (AASHTO) guidelines. This study also examines the performance of LoRa communication strength and data transmission at various distances using a cloud monitoring tool or dashboard.Keywords
In the autonomous industry, there has been significant progress in developing different safety applications for vehicles to enhance the safety of road users by creating intelligent transportation systems. The safety applications can be classified into passive and active systems, and the purpose is to prevent or minimize traffic accidents, injuries, and losses on the road [1,2]. In Southeast Asia, Malaysia is one of the countries with a high incidence rate of road accidents. In 2019, there were 567,516 road accident cases reported which include 6167 fatal accidents. This number of road accidents is predicted to increase yearly [1]. A study by Mahat et al. [3] employed the analytical hierarchy process to analyse factors of road accidents in Malaysia including human behaviour, environmental and vehicle factors. Inappropriate vehicle overtaking or lane changing without signals is ranked in the top three human behavioural subfactors, after driving under the influence of drugs or alcohol and drowsiness.
The Internet of Things has significantly contributed to the advancements in the automotive industry. It offers immense strength and potential, presenting numerous opportunities by integrating innovative and interactive approaches in line with Industry 4.0 [4]. Although various communication techniques have been invented and implemented, such as Wireless Fidelity (WiFi), 4G, 5G, and more, none have comprehensive and reliable communication methods. WiFi only has a short communication range of a maximum of 700 m [5]. Mobile cellular networks like 4G, or 5G require cellular service in Malaysia and may not be available in remote areas or do not cover all road infrastructures [6] and are considered high power consumption [7]. Implementing those communication technologies is unsuitable in Malaysia as they require higher power consumption, and most Malaysian roads, especially highways, do not have power utilities. It will also reduce the lifespan of the automotive battery. To address these challenges, employing communication technology with low power consumption for safety applications may reduce maintenance and implementation costs. For instance, the Long Range (LoRa) communication technology has a wide communication range. LoRa can send small amounts of data frequently through low-powered long-distance transmission [8,9]. Several studies state that LoRa devices which only require small power consumption can communicate over a long distance of up to 15 km [4,9] and could transmit over 100 days using on-battery power [6,9,10]. For example, a study by Chou et al. [11] utilizes LoRa-based low-power wide-area network (LPWAN) technology for a vehicle diagnostic system that comprises a remote diagnostic system, a LoRa gateway, and a cloud platform. The system promptly transmits the abnormal events to the LoRa gateway using an Arduino and LoRa module. Therefore, LoRa can provide relevant contextual information to aid drivers in making decisions such as overtaking decisions in highway scenarios [4]. Moreover, implementing Vehicle-to-Vehicle (V2V) and Vehicle-to-Cloud (V2C) communication technologies by enabling vehicles or road infrastructure to communicate could be beneficial for automation in the transportation sector.
Additionally, overtaking another vehicle is considered one of the driver’s most complex activities. Vehicle overtaking requires the driver to evaluate whether there is enough distance between the surrounding vehicles before performing the overtake [12]. Many factors affect the decision process of the drivers when overtaking, including the visibility of the road, the vehicle positions, driver experience, driver behaviours, and traffic conditions. Therefore, a Vehicle Overtaking System (VOS) may assist the driver by providing context-aware recommendations based on the vehicle’s parameters. From the literature, previous studies focused on developing a vehicle overtaking system to alert drivers of overtaking intentions using various approaches (see Table 1). The approaches aim to enable drivers to respond and avoid accidents caused by unexpected events while ensuring smooth overtaking [13] using different communication technologies including WiFi, cellular, DSRC, etc.

There has been limited research focused on the integration of overtaking safety systems with remote vehicular and perceptual data including speed and position, which is delivered through vehicular communication [24]. Deng et al. [21] introduced a V2X-based collaborative collision avoidance system aimed at preventing vehicle collisions occurring in the opposite lane. The passing vehicle utilises V2V communications to ascertain its proximity to nearby vehicles and decides whether to perform an overtaking manoeuvre. This approach assumes that vehicles are within V2V communication range and allows a vehicle to overtake the vehicle in front of it. However, the authors do not specify the communication medium used, and the approach relies on shared perception. The authors extend their work in [22] by utilising the received signal strength to ascertain the distance between the host vehicle and the vehicles within the cellular communication range that has the highest likelihood of collision. An analysis is conducted on the capacity and interference characteristics based on V2X technology, utilising a Poisson point process. The simulation results demonstrate that the approach outperforms the classic Global Navigation Satellite Systems (GNSS)-based collision avoidance scheme.
In another study, the impact of awareness control approaches including the European Telecommunication Standards Institute (ETSI) dynamic message generation (DMG) [25], Inter-Vehicle Transmit Rate Control (IVTRC) [26], IVTRC based on tracking error threshold (IVTRC-Th) [27] and POSition-ACCuracy (POSACC) [28] in V2V-based overtaking applications within three moving vehicles on a two-lane straight road were assessed. The study found that vehicle dynamics and consistent cooperative awareness messages (CAM) gearbox rate improve the detection of dangerous overtaking manoeuvres. It is also reported that POSACC outperforms ETSI DMG and IVTRC in predicting the overtaking manoeuvres [23]. A theoretical model was introduced based on cooperative sensing and critical safety information sharing among connected vehicles. The risk assessment factor is determined by calculating the amount of time it takes for a vehicle to perform a lane change when overtaking. Overtaking decisions are recommended based on the calculated overtaking timing and speed within the driver’s line-of-sight and non-line-of-sight scenarios [18].
Furthermore, in the absence of vehicular communication technology, overtaking solutions have been developed using cameras, radar, and AI-based systems to detect lane lines, recognize traffic signs, and calculate the distance between vehicles [14,15]. However, implementing these approaches requires many local road datasets to accurately predict bending roads, signs with people, and vehicle detection to calculate the safety distance. This reliance on extensive datasets can present challenges in specific scenarios where the road infrastructure may not be adequately mapped or updated. By calculating the time to collision and overtaking time based on exchanged data, the system can facilitate safe overtaking decisions for drivers without violating traffic rules. Hence, communication-based approaches involve utilizing V2V and V2C were proposed to overcome this issue. Several previous studies allow the system to provide supplementary information (such as the view of the front vehicle or the distance between vehicles) to the driver [16] or require driver involvement in overtaking decisions [17]. Another similar approach is to transmit information such as the vehicle’s speed and position during the overtaking manoeuvre. By calculating the time to collision and overtaking time based on exchanged data, the system can make safe overtaking decisions for drivers without violating traffic rules [18–20].
Therefore, this study develops a vehicle overtaking system (VOS) by utilising LoRa for real-time data exchange between vehicles (V2V) and with the cloud (V2C). We extend our earlier study on the LoRa-based lane change assistance system [4] which focused on establishing communication between a host vehicle and an approaching vehicle. The study demonstrated that LoRa communication was successfully established and used to transmit the distance and speed data from the approaching vehicle to the host vehicle. However, no further evaluation was done on the performance of the LoRa communication. Hence, in this study, the proposed system incorporates V2V and V2C communication with the LoRa technology to provide more assistance for vehicle overtaking by comprehensively understanding the surroundings during an overtaking scenario. We calculated the safety distance for an overtaking scenario as the basis for the overtaking recommendation provided by the proposed system, either safe or not safe to overtake. Also, this study assessed the performance of LoRa communication in terms of signal strength and data transmission in a VOS context using a cloud dashboard. The following section presents the materials and methods implemented in this study, followed by the results and discussions. The final section concludes this study.
The design of the Vehicle Overtaking System (VOS) followed a conceptual design framework, as shown in Fig. 1. The vehicle nodes have sensors that measure distances between vehicles, enabling informed overtaking decisions for advising the drivers while performing overtaking. The vehicle node consists of two computational components: a microcontroller and a microcomputer.
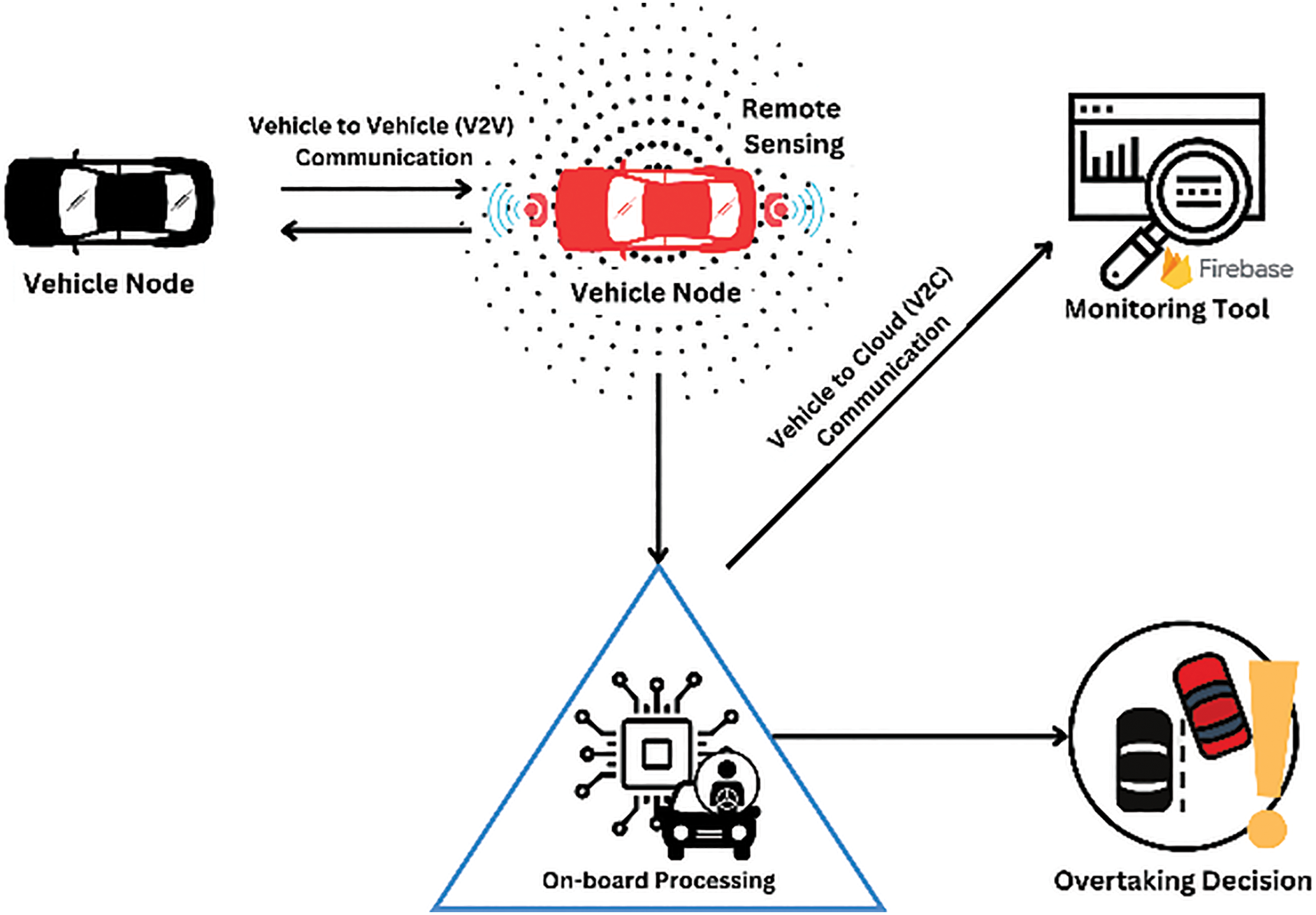
Figure 1: Conceptual framework
A microcontroller is responsible for collecting and transmitting data from various external modules, such as the GPS module, LoRa module, compass module and four ultrasonic sensors. In this study, the vehicle nodes are equipped with an Arduino Uno microcontroller board based on the ATmeha328 and integrated with a LoRa SX1278 module for V2V and V2C communication and a Grove SIM28 GPS module for precise coordination data. The vehicle node is equipped with four HC-SR04 ultrasonic sensors to measure the distance between vehicles from all directions. The microcomputer is responsible for storing and processing data, as well as making decisions based on the data. In this study, a Raspberry Pi Model B microcomputer can communicate with the microcontroller Serial communication through a Type A/B standard USB 2.0 cable to receive information from other vehicles via LoRa communication or self-information from the external modules. The vehicle node also uses LoRa communication to transmit its data to other vehicle nodes. The vehicle node can provide vehicle overtaking assistance by evaluating whether it is safe or not to overtake, depending on the data and the decision made by the microcomputer. Furthermore, the vehicle node is equipped with a Bluetooth HC-05 Module, which is connected to a microcomputer to send any processed information to the mobile application. Fig. 2 shows the flowchart of the vehicle node.

Figure 2: System flowchart
The main concept of the proposed VOS is to ensure that each vehicle maintains a safety distance (Dsafe) between others during the entire overtaking manoeuvres. The calculation of the Dsafe follows the guidelines outlined in the manual published by the Association of State Highway and Transportation Officials (AASHTO) [29]. In the guideline, Eq. (1) expresses how Dsafe is determined based on parameters such as decision sight distance. Each vehicle will send its Dsafe continuously together with the coordination information. V represents vehicle speed, while t denotes the driver’s manoeuvring time, accounting for situations where they need to maintain or reduce speed or come to a complete stop on urban roads, urban cores, rural towns, etc. In this study, t within 14.5 s is set as suggested by AASHTO to ensure appropriate safety distance across all road scenarios.
At the vehicle node, the VOS will be triggered when it detects activation of the turn signal. Once an overtaking intention is identified, the overtaking intention is transmitted to other surrounding vehicles to inform other drivers. Subsequently, the system will analyse each communicated vehicle’s position by setting its coordination as the origin. Through computation, both the cardinal directions and distances between vehicles can be determined (see Fig. 3).

Figure 3: Defined cardinal directions
The cardinal directions relativeθ are determined based on the bearing between the vehicle node using the equation shown in Eq. (2). In this equation, the ϕ1 and ϕ2 refer to the host vehicle latitude and the surrounding vehicle latitude. The
Furthermore, the process of the overtaking manoeuvre is demonstrated on a one-way two-line road where the cardinal directions of surrounding vehicles are calculated using Eq. (2). To generate the overtaking decision for the driver, vehicles involved in the overtaking process are filtered out based on their cardinal direction and distance from other vehicles. The filtering process identifies the closest vehicle from each direction. This process is illustrated in Fig. 4.
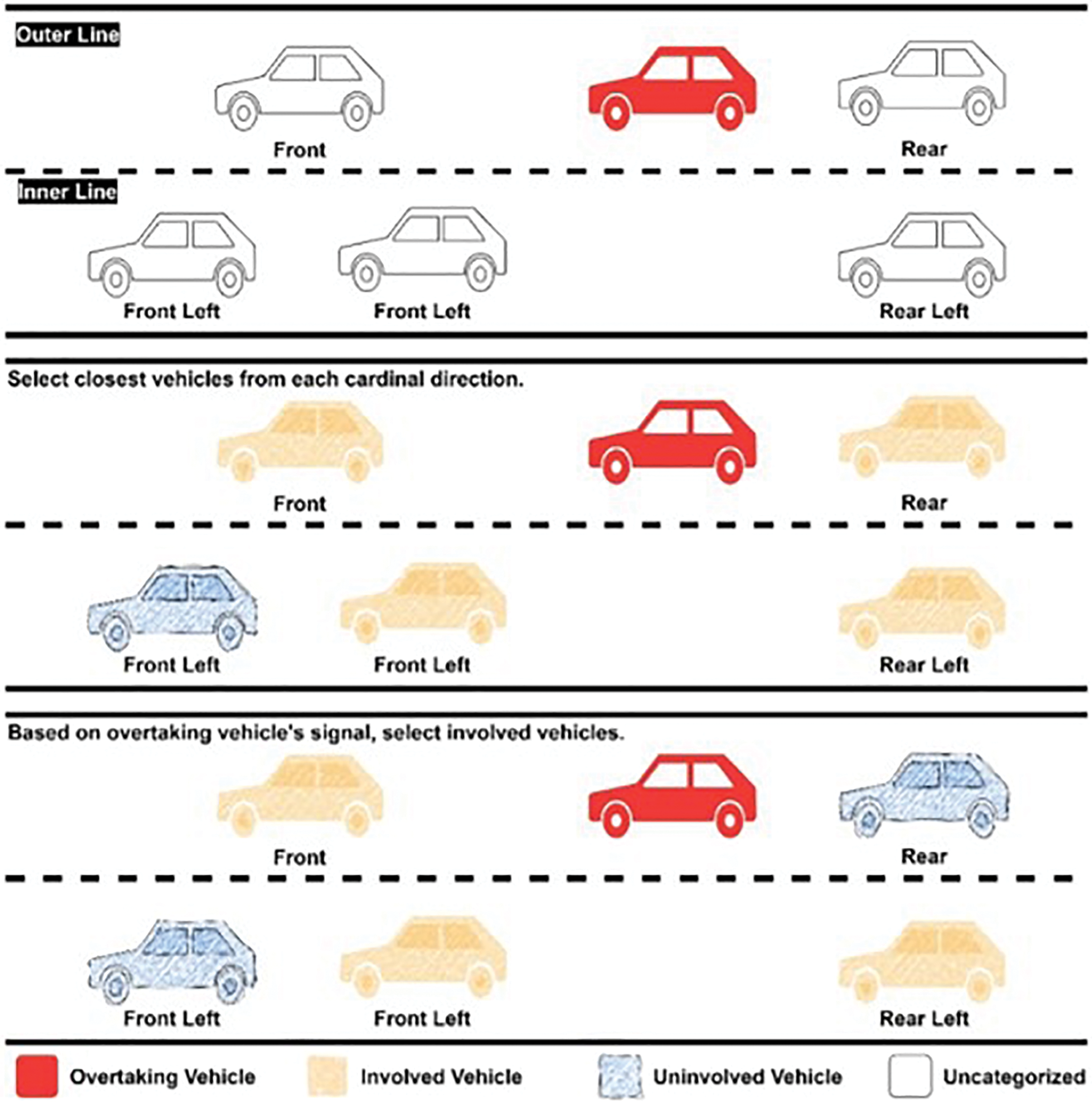
Figure 4: Filtering phase during the overtaking
The Haversine formula is used to calculate distances between vehicles with provided coordinates, as shown in Eq. (3). In this equation, the ϕ1 and ϕ2 refer to the host vehicle latitude and the surrounding vehicle latitude. The

Following the filtration stage, the system can determine whether overtaking is feasible by assessing the safety distance between each vehicle involved. This process is shown in Fig. 5, mirroring that of Fig. 4. The decision to initiate an overtake manoeuvre hinges on regularly comparing measured distances between vehicles (utilizing ultrasonic sensors) with the computed Dsafe value specific to each instance. After the overtaking decision is generated, the system will advise the driver while performing overtaking through the mobile application using Bluetooth communication.
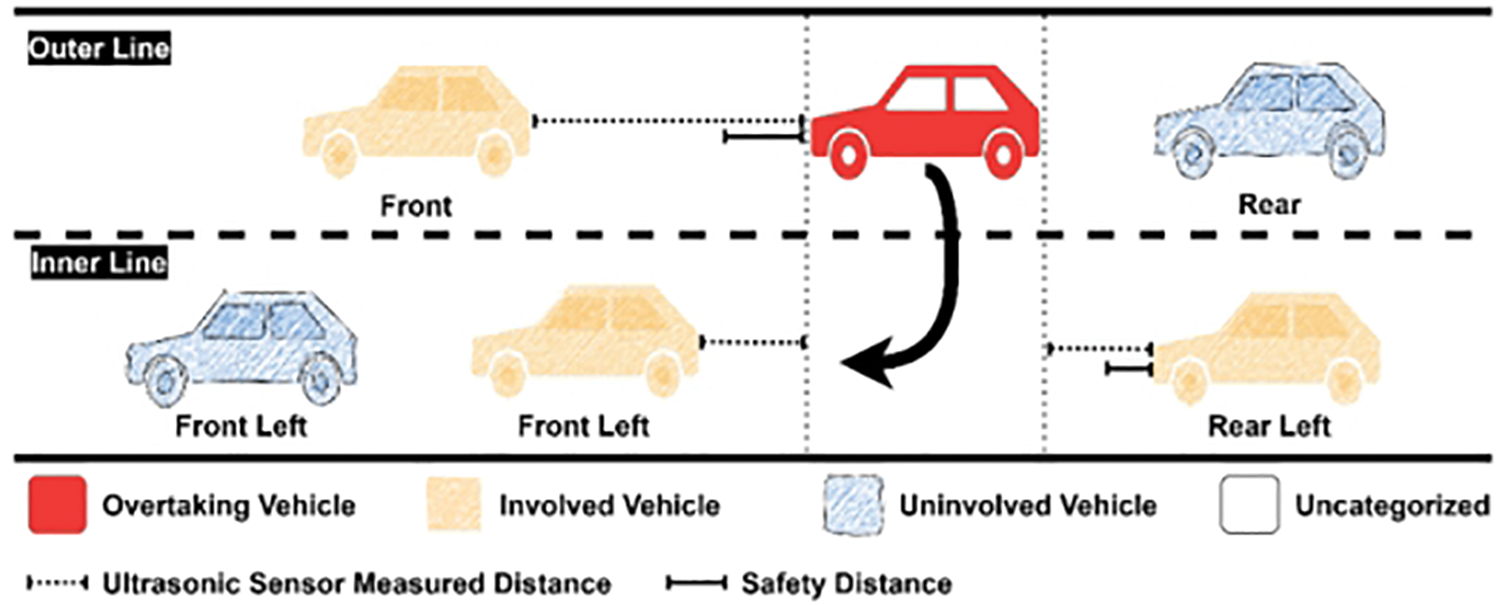
Figure 5: Overtaking scenario
In this study, a mobile application is developed for the driver to receive information from the vehicle node. It is written using Kotlin programming language, and it can be installed on any phone which has an Android version 5.0 (Lollipop) and above. The application is connected vehicle node through Bluetooth communication. Fig. 6 shows examples of the notification on the overtaking decision to the driver for three possible scenarios, i.e., (a) when it is safe to overtake, (b) when it is not safe to overtake another vehicle and (c) when there is a nearby vehicle overtaking another vehicle within the range of the host vehicle.
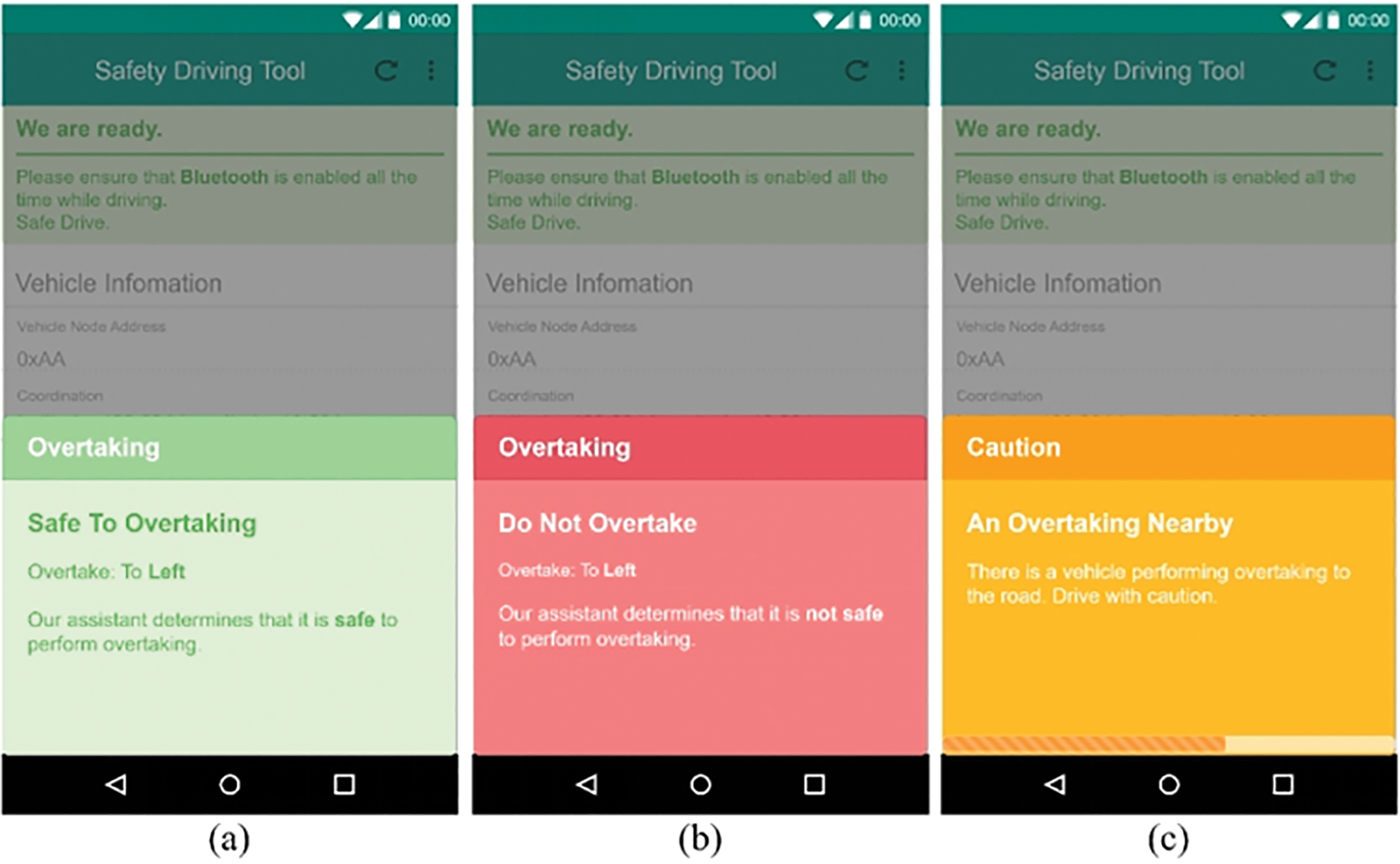
Figure 6: Examples of system notifications
Moreover, a cloud dashboard is also developed to monitor any process that occurred in the vehicle node in real time. The vehicle node will upload any interaction made to the Firebase’s Realtime database through Wireless Fidelity (WiFi) communication and display interactive dashboard. The first section of the dashboard on presents the connected vehicle real-time information as well as the information it received from other nodes, as shown in Fig. 7.
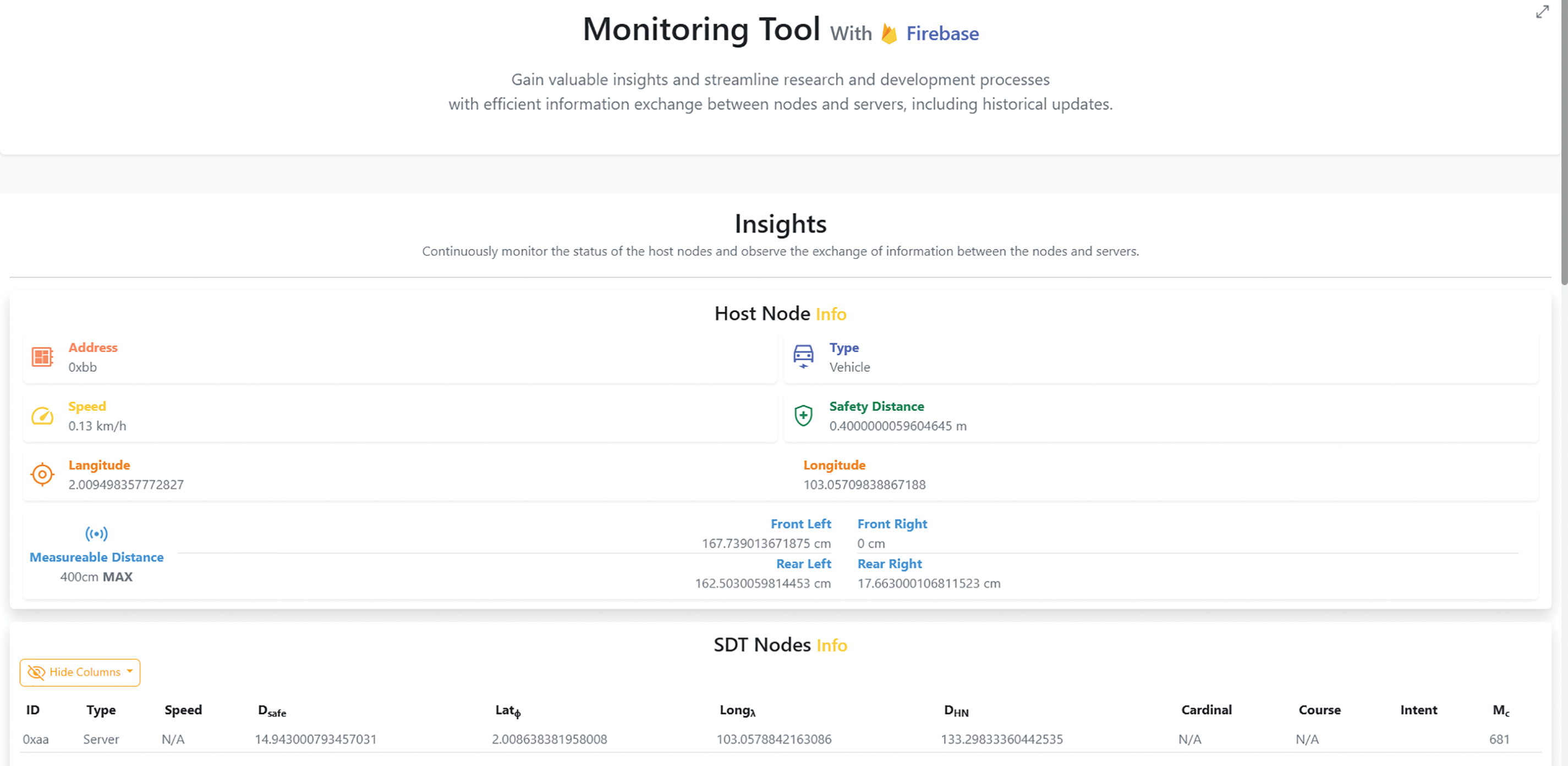
Figure 7: Real-time information display on dashboard
The dashboard is divided into three sections that display the connected vehicle status, the measured distance, and the historical updates of the sensors. It can monitor the LoRa transmission rate, update rate between the microcontroller and microcomputer, error information, and distance in meters. It can also show the monitored and safety distance in a graph. Additionally, it also includes a filtering feature to visualize the vehicle information based on the specific period. In addition, the dashboard also allows user to monitor the performance and reliability of the LoRa network between other nodes in terms of LoRa transmission, LoRa strength and LoRa packet lost duration. The LoRa transmission section shows the frequency, average, minimum, and maximum values of the data transmission time between the nodes. The LoRa Strength and LoRa Packet Lost Duration section shows the signal strength and the duration of packet loss for each node.
In V2V communication, to ensure that vehicle nodes can receive information that is reliable and accurate, it is important to standardize the data structure of the LoRa packet. Moreover, the vehicle coordination data is transmitted to the cloud dashboard via Vehicle to Cloud (V2C) communication using LoRa. Each packet is sent in little-endian format. Each packet for use contains 24 bytes of information and is based on a different type of node; the order of the data will be different. Tables 3 and 4 show the LoRa packet structure for the vehicle node and server node.


When the microcontroller receives a LoRa packet from a node via the LoRa module, it ensures the data is not corrupted by calculating the checksum and comparing it with the checksum retrieved from the packet. Once the data is extracted, several data are used to calculate other information, such as the distance between two nodes and the cardinal degree. Then, the data was encoded again, which was sent to the microcomputer based on data received from the vehicle node or server node, as shown in Tables 5 and 6. Additionally, the microcontroller is also responsible for collecting all the information from other external modules and encoding the information to send to the microcomputer, as shown in Table 7.



The LoRa transmission is analysed based on the strength and packet loss when vehicle nodes are at various distances, i.e., 50, 100, 150 and 200 m within 5 min. The varying distances represent various overtaking scenarios, ranging from relatively short-range to longer-range circumstances between the overtaking vehicle and the vehicle being overtaken. Using V2C communication, the data can be monitored on the cloud dashboard. The illustrations are shown in Figs. 8–15, respectively.
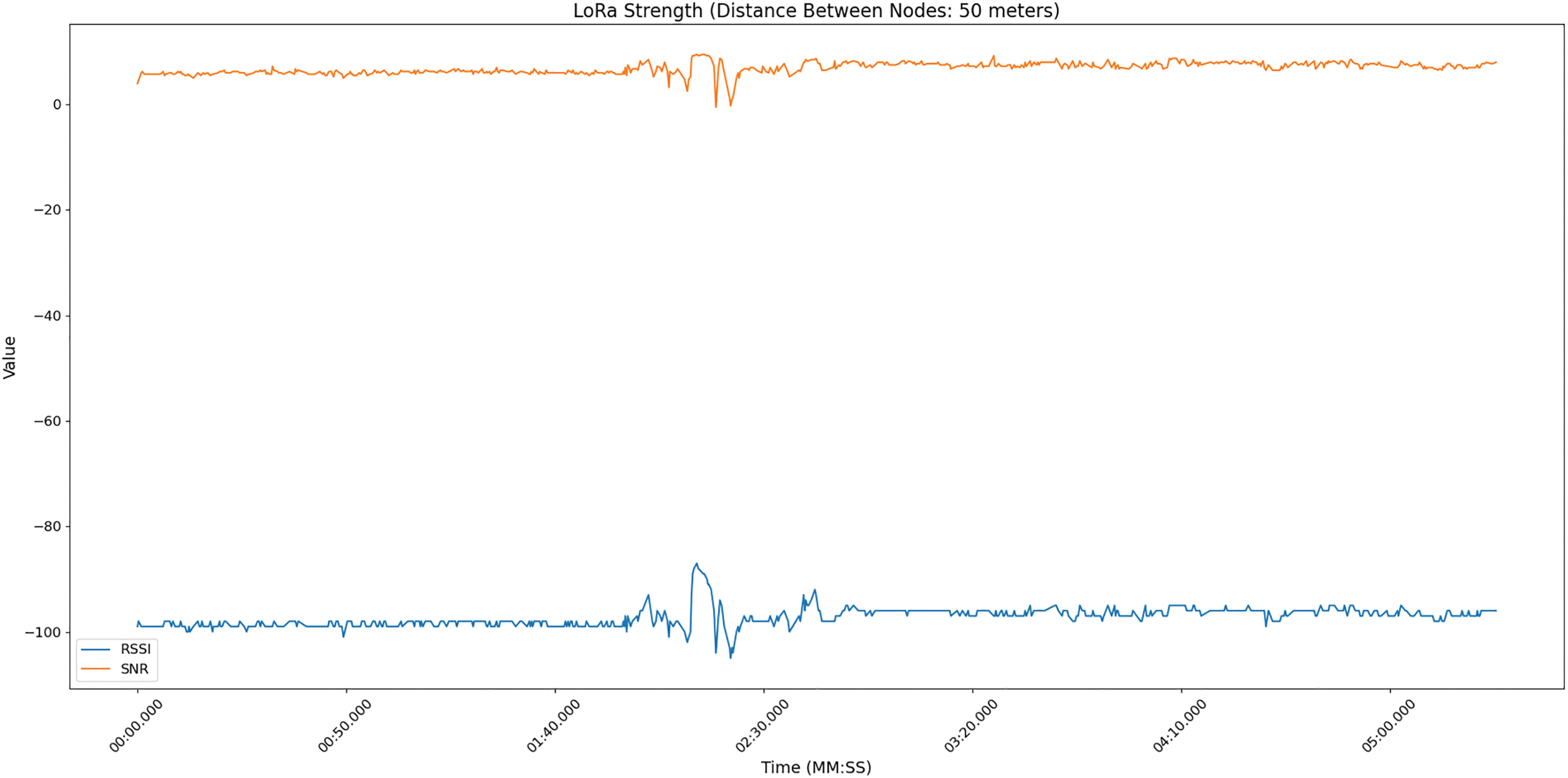
Figure 8: LoRa transmission: ~50 m
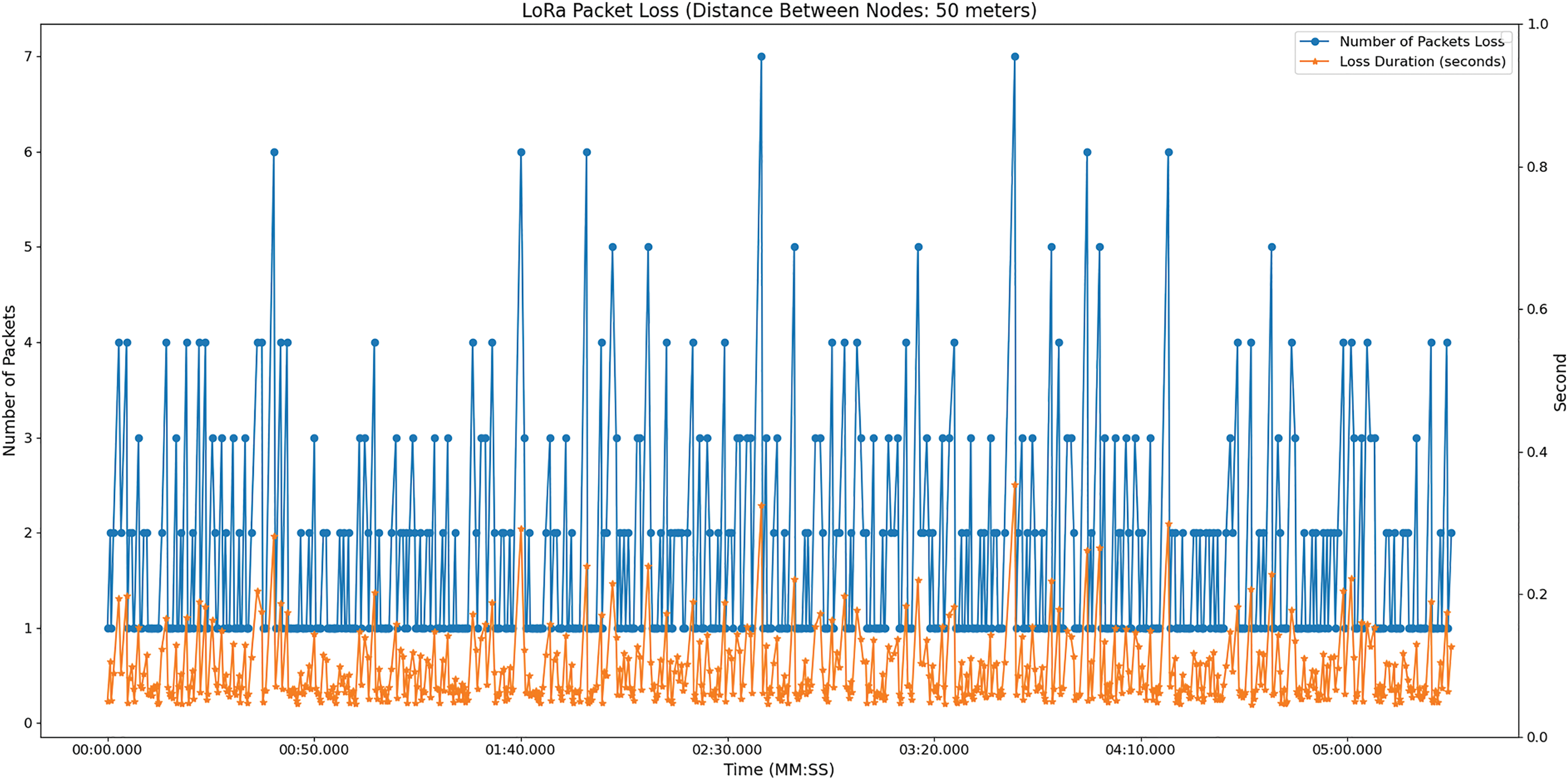
Figure 9: LoRa packet loss: ~50 m
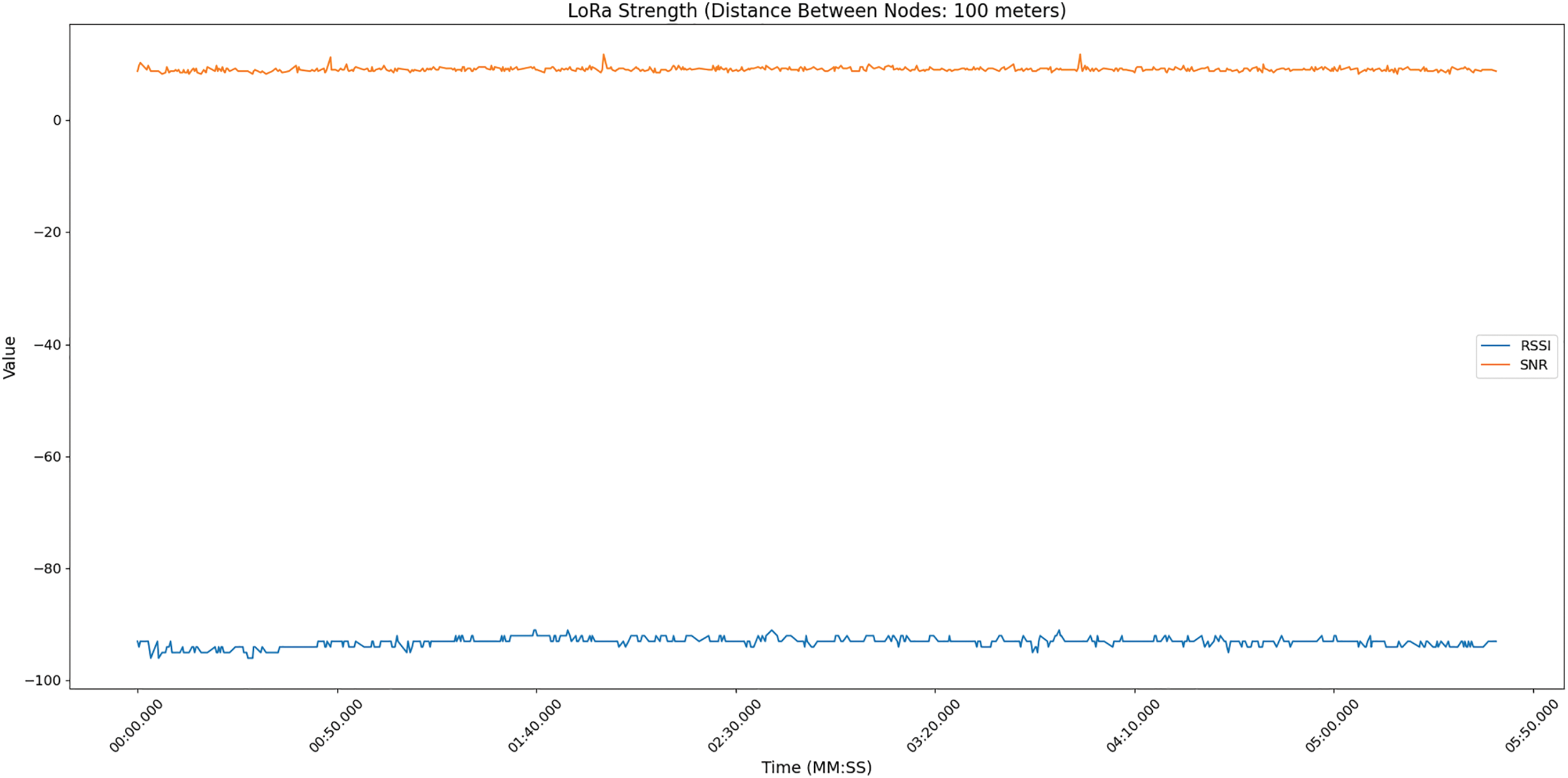
Figure 10: LoRa strength: ~100 m
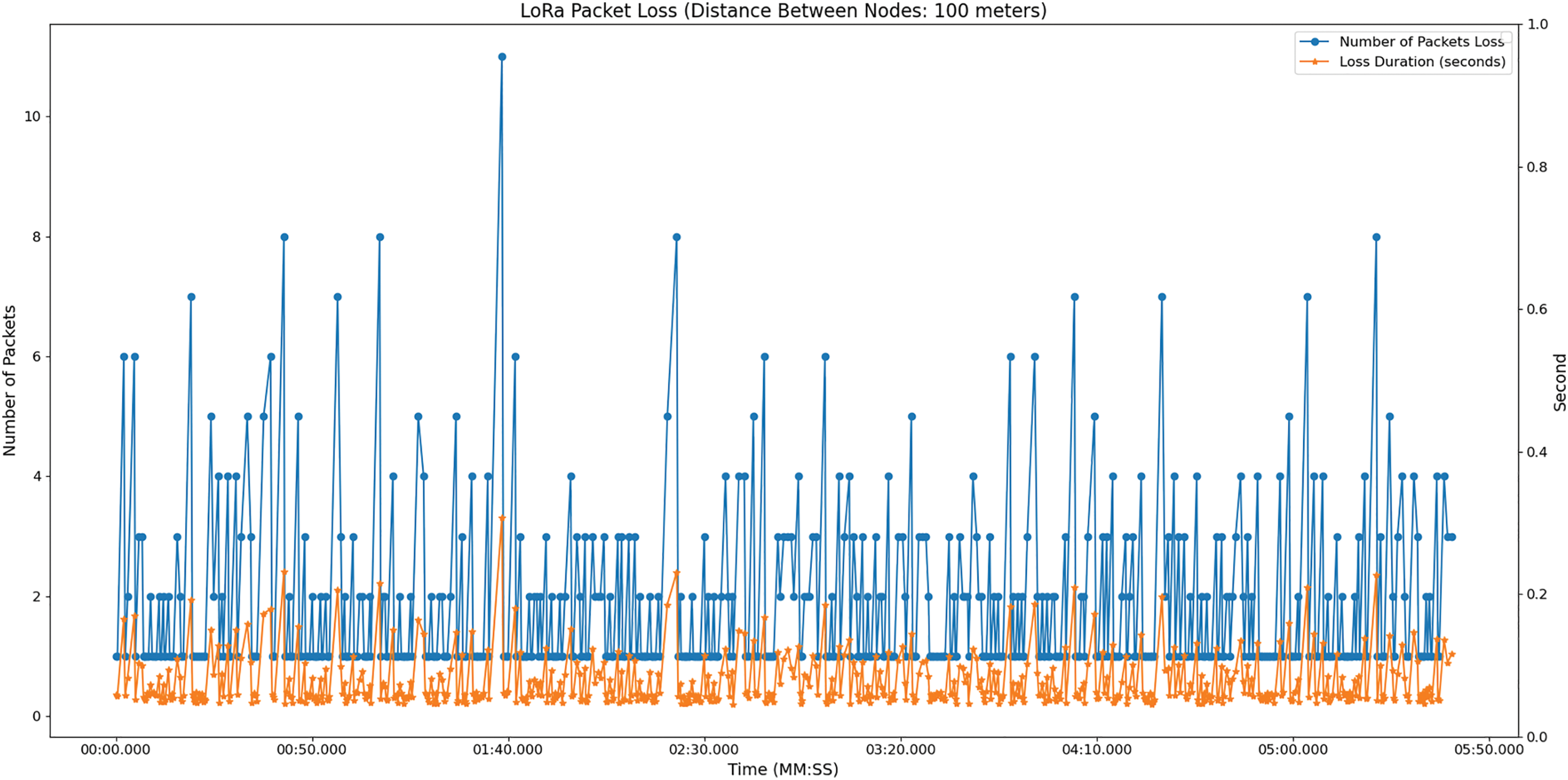
Figure 11: LoRa packet loss: ~100 m
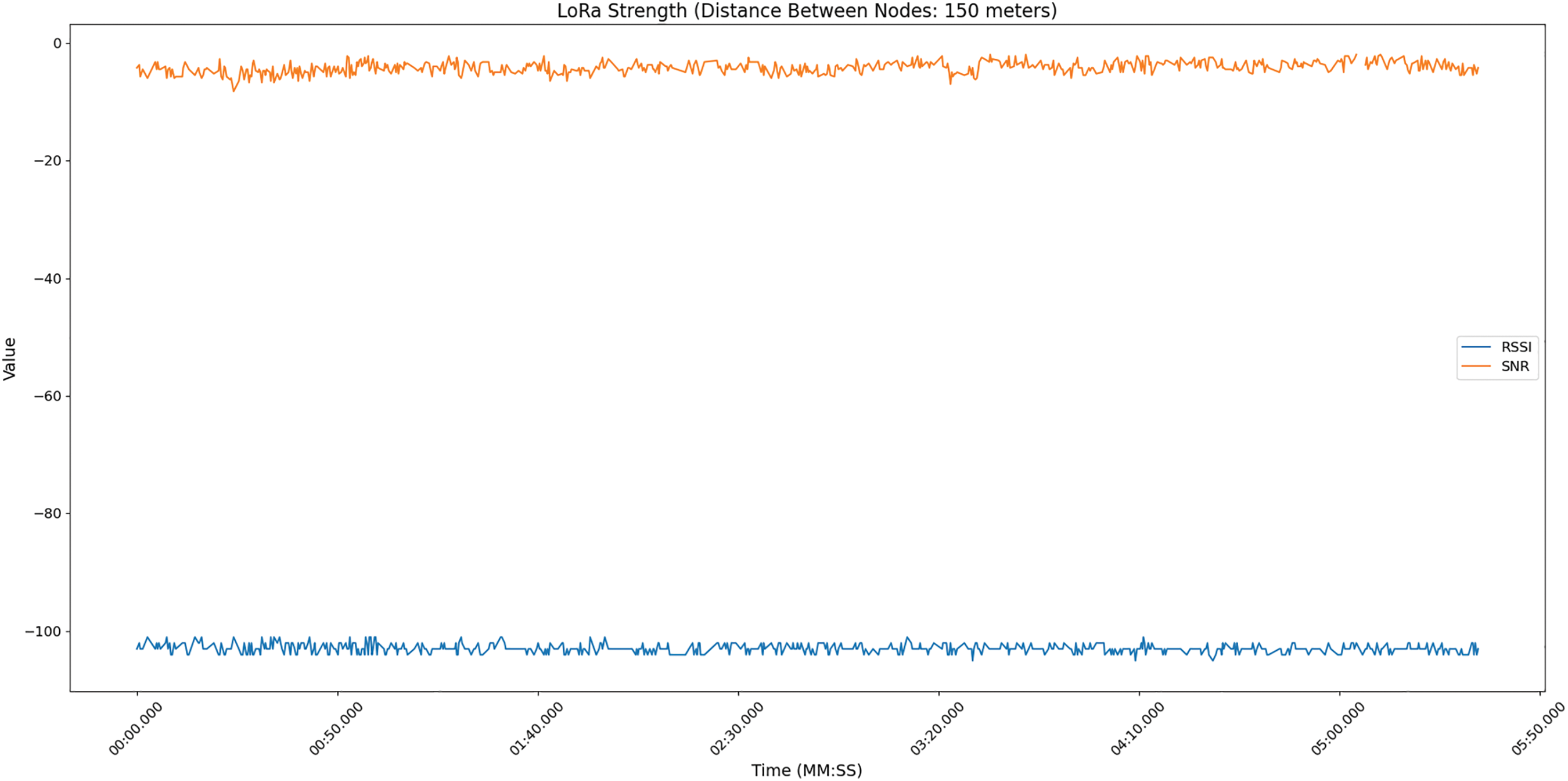
Figure 12: LoRa strength: ~150 m
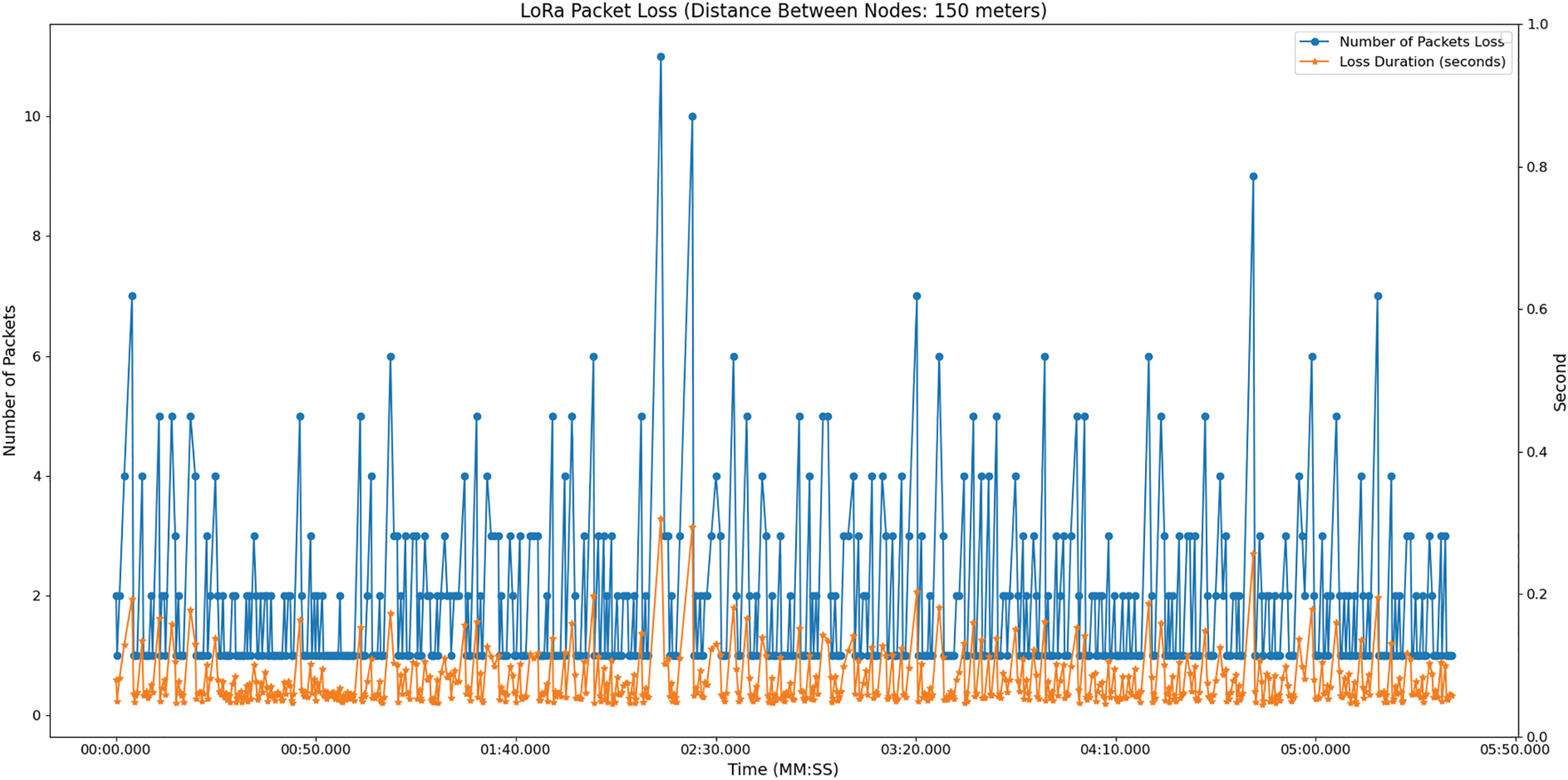
Figure 13: LoRa packet loss: ~150 m
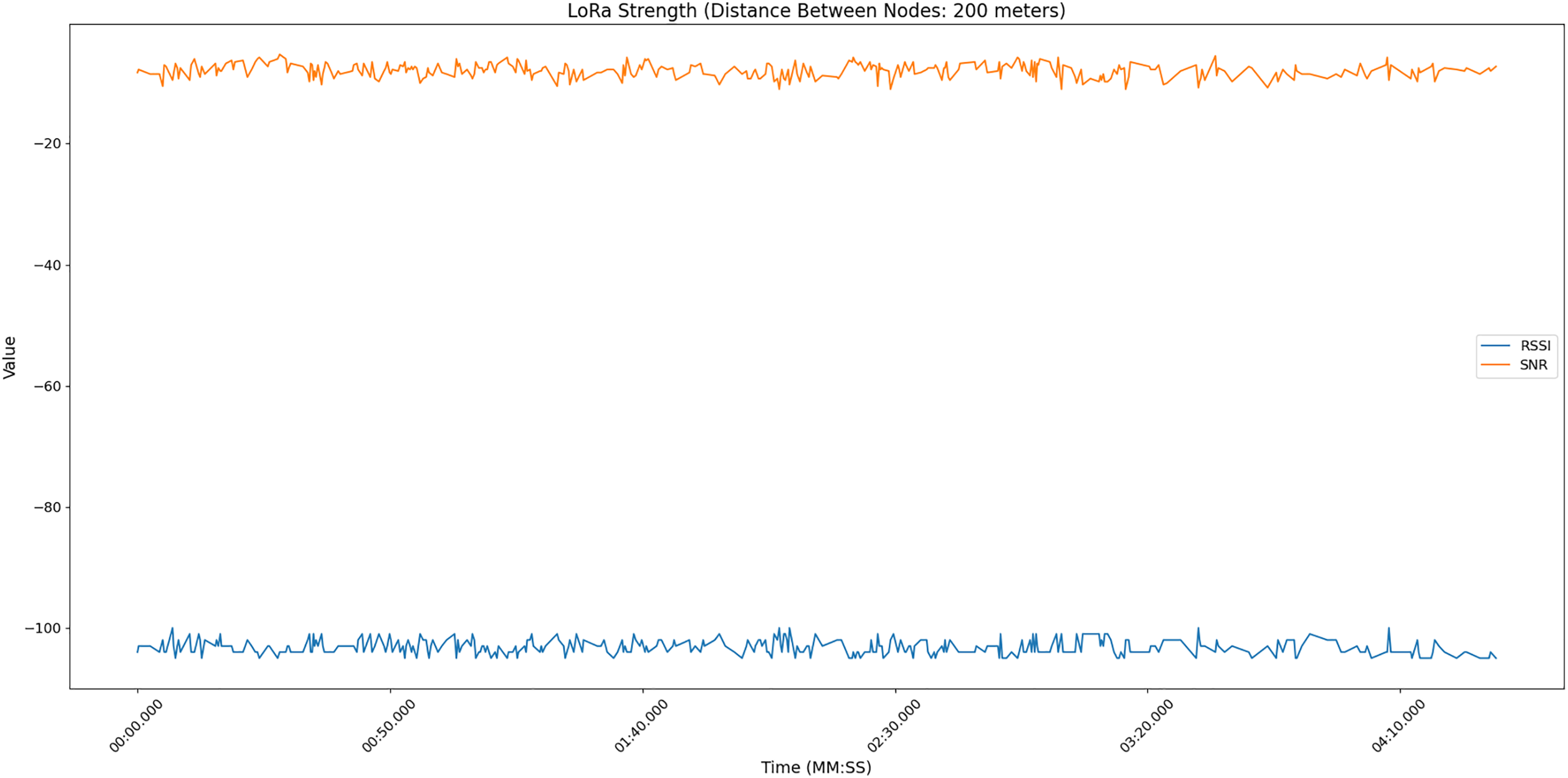
Figure 14: LoRa strength: ~200 m
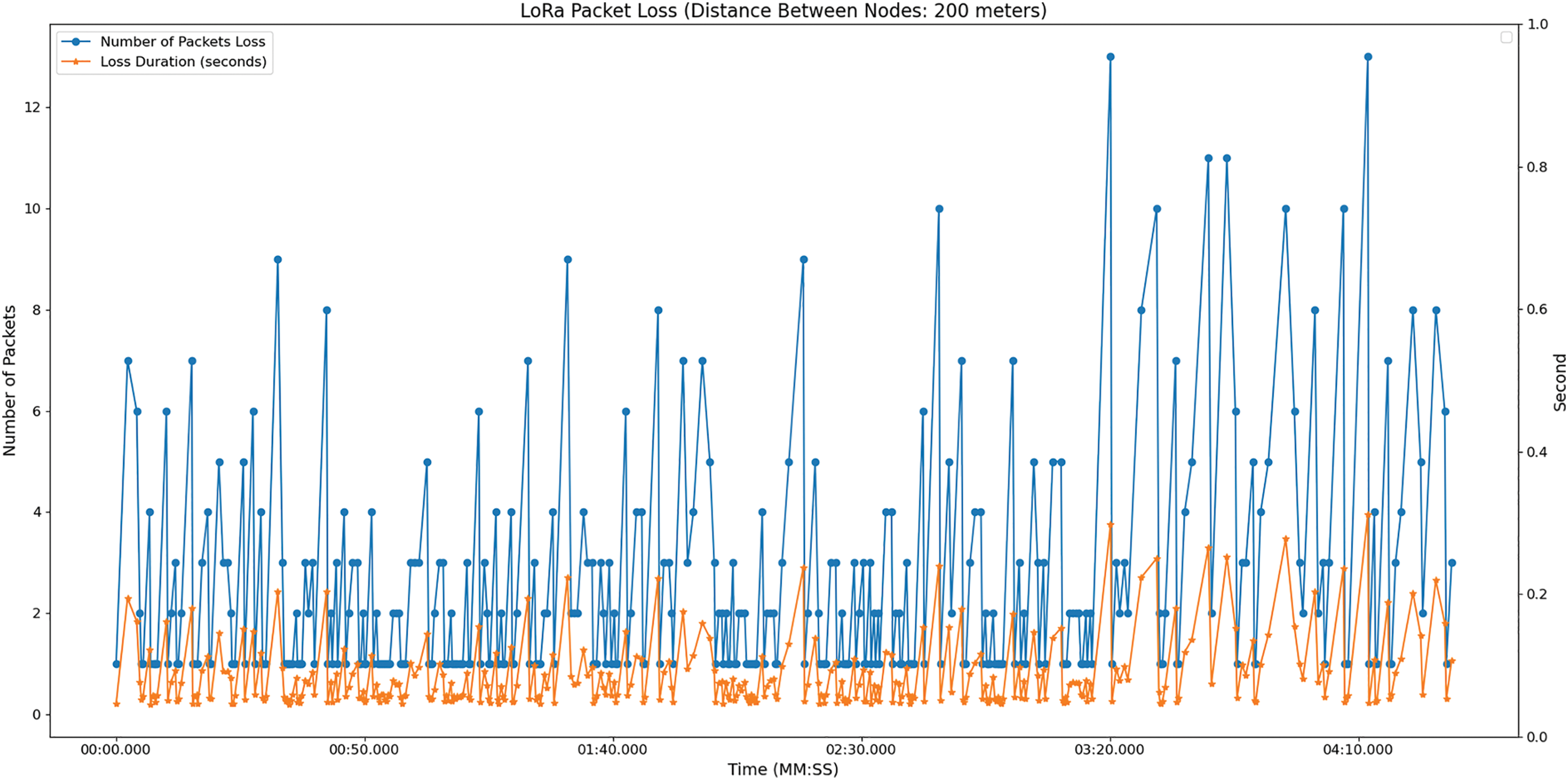
Figure 15: LoRa packet loss: ~200 m
The LoRa performance in this study is compiled and presented in Table 8. Based on the findings, as the distance between nodes expands, the average and minimum packet interarrival times demonstrate a tendency to increase, indicating that the time required for packets to go between nodes is prolonged. The time required for packet recovery similarly exhibits a rising pattern as the distance increases.

This suggests that as the distance between nodes increases, the duration needed to retrieve packets (perhaps due to transmission mistakes or losses) generally rises. The packet interarrival time refers to the duration it takes for packets to be transmitted from one vehicle to another, whereas the packet recovery time indicates the duration required to recover from any packet losses or mistakes. Reduced intervals between packet arrivals are advantageous for swift communication during overtaking, although decreased intervals for recovery are essential for ensuring communication dependability. At approximately 200 m, typically demonstrates larger intervals between packet arrivals and longer times for recovery compared to the shorter distance. This suggests possible difficulties in sustaining effective and dependable communication over extended distances, which is particularly important in situations where prompt and precise communication is crucial, such as overtaking circumstances. Obstacles in the environment may cause absorption or scattering of signals, while other devices or signal sources may have interfered with the transmission. As a result, transmission quality deteriorates over longer distances between nodes.
Besides, the Received Signal Strength Indicator (RSSI) values offer insights into the magnitude of the received signal between the vehicle nodes, while the Signal-to-Noise Ratio (SNR) values show the signal’s quality. When it comes to overtaking, it is preferable to have a greater RSSI and SNR to guarantee a robust and unambiguous communication connection. An optimal RSSI guarantees consistent communication between vehicle nodes, while a high SNR signifies a clear and reliable signal, enhancing the safety of overtaking manoeuvres. Therefore, modifying modulation methods, spreading factors, and transmission power can optimize LoRa settings which will lead to achieving a balance between RSSI and SNR. Shorter distances may allow for faster data rates, whereas longer distances may require lower spreading factors and higher transmission power to ensure reliable communication.
The implementation of the Vehicle Overtaking System (VOS) is aimed at addressing road safety concerns in Malaysia. The VOS assists drivers with overtaking by facilitating real-time information exchange between vehicles. The purpose of this system is to address the constraints of human drivers in accurately anticipating safe opportunities for overtaking, considering variables such as blind spots and weather conditions. The system comprises vehicle nodes that receive data from nearby vehicles, analyse it, and deliver pertinent and precise information that impacts the driver’s decision to perform an overtaking manoeuvre. To manage large volumes of data, each vehicle node is equipped with a Raspberry Pi Model B microcomputer connected to an Arduino Uno microcontroller.
Using both the Raspberry Pi and Arduino, the VOS processes real-time coordination data and calculates safety distances to provide recommended overtaking decisions, particularly in intentional overtaking scenarios. However, this study requires Vehicle-to-Vehicle (V2V) communication for the system to facilitate information exchange among vehicle nodes. When the drivers’ understanding of their surroundings is improved, they will be able to make well-informed decisions before overtaking another vehicle on the road. V2V technology diminishes reliance solely on human perception by establishing a networked system to enhance safety. The incorporation of vehicle-to-cloud (V2C) allows the LoRa performance to be monitored and validates our conceptual framework. The proposed system is responsive to provide notifications to the driver whether it is safe to overtake or not. This serves as a foundation for further experiments before conducting real-world testing to confirm the system’s effectiveness and identify the impact of different traffic and environmental conditions.
In future developments, the Lidar module is proposed to replace all the ultrasonic sensors on the vehicle node for wide measurement angle and measurement distance. Moreover, for more precise values, it is recommended to obtain the speed of the vehicle node from its existing hardware module rather than relying on a GPS module. For security and privacy concerns, apart from the AES-128 encryption equipped in the LoRa module, future work may consider other security features to safeguard the V2V and V2C communication from malicious attacks. Additionally, LED lights can be integrated into the side mirrors of the vehicle to reduce driving distraction. By leveraging the cloud dashboard, the collected data—encompassing driving behaviour—can be analysed to create a more personalized VOS system, develop a reckless driving detection system, and explore other applications.
Acknowledgement: Authors would like to thank the Centre for Intelligent Cloud Computing for the support and encouragement.
Funding Statement: This study is supported by the TM R&D grant (RDTC/221046).
Author Contributions: The authors confirm contribution to the paper as follows: study conception and design: Siti Fatimah Abdul Razak and Sumendra Yogarayan; data collection: Kwang Chee Seng; analysis and interpretation of results: Sumendra Yogarayan and Kwang Chee Seng; draft manuscript preparation: Siti Fatimah Abdul Razak and Kwang Chee Seng. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declares no conflicts of interest to report regarding the present study.
References
1. Ministry of Transport Malaysia, “Malaysia road safety plan 2022–2030,” 2022. Accessed: Feb. 05, 2023. [Online]. Available: https://www.mot.gov.my/en/Pages/Land/Safety%20and%20Security/MRSP%202022-2030%20(1022).pdf [Google Scholar]
2. F. R. Fauzi, S. P. Santosa, B. K. Hadi, and A. Jusuf, “Composite based lightweight structure design for crash and safety application,” in 2018 5th Int. Conf. Electr. Veh. Technol. (ICEVT), 2018, pp. 161–166. [Google Scholar]
3. N. Mahat, N. Jamil, and S. S. Raseli, “Analysing road accident triggers in Malaysia by using analytical hierarchy process,” GADING J. Sci. Technol., vol. 3, no. 2, pp. 118–125, 2020. [Google Scholar]
4. S. F. Abdul Razak, Y. R. Tee, S. Yogarayan, N. H. Kamis, and I. Yusof, “Lane change decision aid and warning system using LoRa-based vehicle-to-vehicle communication technology,” Bull. Electr. Eng. Inform., vol. 12, no. 4, pp. 2428–2437, Aug. 2023. doi: 10.11591/eei.v12i4.4662. [Google Scholar] [CrossRef]
5. S. Yogarayan, S. F. A. Razak, M. F. A. Abdullah, and F. O. W. Kwong, “Connected vehicle communication concept for flood level warning using low cost microcontroller,” in 2021 9th Int. Conf. Inf. Commun. Technol., ICoICT 2021, Institute of Electrical and Electronics Engineers Inc., Aug. 2021, pp. 423–428. doi: 10.1109/ICoICT52021.2021.9527432. [Google Scholar] [CrossRef]
6. K. K. Choo and A. Zourmand, “Fuzzy logic-based flood detection system using lora technology,” in 2020 16th IEEE Int. Coll. Signal Proc. Appl. (CSPA 2020), 2020, pp. 40–45. [Google Scholar]
7. G. A. Amagsila, M. E. Cabuhat, J. E. Tigbayan, E. Uy, and E. Ramirez, “A framework for mobile application of flood alert monitoring system for vehicle users using arduino device,” in 2017 IEEE Natl. Aerosp. Electron. Conf. (NAECON), 2017, pp. 1–6. [Google Scholar]
8. S. Devalal and A. Karthikeyan, “LoRa technology—An overview,” in Proc. 2nd Int. Conf. Electron., Commun. Aerosp. Technol., ICECA 2018, Institute of Electrical and Electronics Engineers Inc., Sep. 2018, pp. 284–290. doi: 10.1109/ICECA.2018.8474715. [Google Scholar] [CrossRef]
9. T. Groot and B. Dezfouli, “Flomosys: A flood monitoring system,” in 2020 IEEE Global Humanit. Technol. Conf., GHTC 2020, Institute of Electrical and Electronics Engineers Inc., Oct. 2020. doi: 10.1109/GHTC46280.2020.9342943. [Google Scholar] [CrossRef]
10. M. Ragnoli, G. Barile, A. Leoni, G. Ferri, and V. Stornelli, “An autonomous low-power LoRa-based flood-monitoring system,” J. Low Power Electron. Appl., vol. 10, no. 2, pp. 1–15, Jun. 2020. doi: 10.3390/jlpea10020015. [Google Scholar] [CrossRef]
11. Y. -S. Chou et al., “i-Car System: A LoRa-based low power wide area networks vehicle diagnostic system for driving safety,” in 2017 Int. Conf. Applied System Innovati. (ICASI), Sapporo, Japan, 2017, pp. 789–791, doi: 10.1109/ICASI.2017.7988549. [Google Scholar] [CrossRef]
12. M. K. A. Kamarudin et al., “Road traffic accident in Malaysia: Trends, selected underlying, determinants and status intervention,” Int. J. Eng. Technol., vol. 7, no. 4. 34, pp. 112–117, 2018. [Google Scholar]
13. X. Chen, D. Liu, G. Hua, and L. Mo, “A safety lane change method based on sensor date fusion designed for assistance driving,” in Proc. 2021 China Autom. Congr., CAC 2021, Institute of Electrical and Electronics Engineers Inc., 2021, pp. 5819–5823. doi: 10.1109/CAC53003.2021.9727469. [Google Scholar] [CrossRef]
14. M. Athree and A. Jayasiri, “Vision-based automatic warning system to prevent dangerous and illegal vehicle overtaking,” in Proc. Int. Res. Conf. Smart Comput. Syst. Eng., SCSE 2020, Institute of Electrical and Electronics Engineers Inc., Sep. 2020, pp. 25–30. doi: 10.1109/SCSE49731.2020.9313006. [Google Scholar] [CrossRef]
15. S. K. Perepu and P. Prasanna Kumar, “Safe overtaking using image processing and deep learning techniques,” in 2021 IEEE Int. Conf. Comput., ICOCO 2021, Institute of Electrical and Electronics Engineers Inc., 2021, pp. 55–60. doi: 10.1109/ICOCO53166.2021.9673539. [Google Scholar] [CrossRef]
16. A. M. Saji, A. V. Kumar, A. C. Joseph, and A. J. George, “Safe overtaking system using Raspberry Pi,” in 2019 2nd Int. Conf. Intell. Comput., Instrument. Control Technol. (ICICICT), 2019, pp. 1685–1689. [Google Scholar]
17. Abdul Rahim, P. K. Mallik, and V. A. S. Ponnapalli, “Fractal antenna design for overtaking on highways in 5G vehicular communication Ad-hoc networks environment,” Int. J. Eng Adv. Technol., vol. 9, no. 1S6, pp. 157–160, Dec. 2019. doi: 10.35940/ijeat.a1031.1291s619. [Google Scholar] [CrossRef]
18. G. Abdelkader and K. Elgazzar, “A novel lane overtaking approach for connected vehicles using cooperative perception,” in 7th IEEE World Forum Internet Things, WF-IoT 2021, Institute of Electrical and Electronics Engineers Inc., Jun. 2021, pp. 142–146. doi: 10.1109/WF-IoT51360.2021.9595955. [Google Scholar] [CrossRef]
19. H. S. Aldulaimi and B. B. Hamed, “Comforting and safer highway overtaking for lane change based on vehicles speed advisory,” in Proc. 2022 22nd Int. Conf. Computat. Sci. Appl., ICCSA 2022, Institute of Electrical and Electronics Engineers Inc., 2022, pp. 56–65. doi: 10.1109/ICCSA57511.2022.00019. [Google Scholar] [CrossRef]
20. H. S. Aldulaimi and B. Ben Hamed, “Smart and novel algorithm for highway overtaking classification,” in 2022 Int. Symp. Netw., Comput. Commun., ISNCC 2022, Institute of Electrical and Electronics Engineers Inc., 2022. doi: 10.1109/ISNCC55209.2022.9851707. [Google Scholar] [CrossRef]
21. R. Deng, B. Di, and L. Song, “Cooperative collision avoidance scheme design and analysis in V2X-based driving systems,” in 2018 IEEE Global Commun. Conf. (GLOBECOM), 2018, pp. 1–7. [Google Scholar]
22. R. Deng, B. Di, and L. Song, “Cooperative collision avoidance for overtaking maneuvers in cellular V2X-based autonomous driving,” IEEE Trans. Veh. Technol., vol. 68, no. 5, pp. 4434–4446, May 2019. doi: 10.1109/TVT.2019.2906509. [Google Scholar] [CrossRef]
23. S. Bolufe, C. A. Azurdia-Meza, S. Cespedes, and S. Montejo-Sanchez, “Impact of awareness control on V2V-based overtaking application in autonomous driving,” IEEE Commun. Lett., vol. 25, no. 4, pp. 1373–1377, Apr. 2021. doi: 10.1109/LCOMM.2020.3044734. [Google Scholar] [CrossRef]
24. C. Mo, Y. Li, and L. Zheng, “Simulation and analysis on overtaking safety assistance system based on vehicle-to-vehicle communication,” Autom. Innov., vol. 1, no. 2, pp. 158–166, Apr. 2018. doi: 10.1007/s42154-018-0017-9. [Google Scholar] [CrossRef]
25. ETSI, “EN 302 637-2—V1.3.2-intelligent transport systems (ITS); vehicular communications; basic set of applications; Part 2: Specification of cooperative awareness basic service,” 2014. Accessed: 16 Mar. 16, 2023. [Online]. Available: https://www.etsi.org/deliver/etsi_en/302600_302699/30263702/01.03.02_60/en_30263702v010302p.pdf [Google Scholar]
26. C. -L. Huang, Y. P. Fallah, R. Sengupta, and H. Krishnan, “Adaptive intervehicle communication control for cooperative safety systems,” IEEE Netw., vol. 24, no. 1, pp. 6–13, 2010. doi: 10.1109/MNET.2010.5395777. [Google Scholar] [CrossRef]
27. C. L. Huang, Y. P. Fallah, R. Sengupta, and H. Krishnan, “Intervehicle transmission rate control for cooperative active safety system,” IEEE Trans. Intell. Transp. Syst., vol. 12, no. 3, pp. 645–658, Sep. 2011. doi: 10.1109/TITS.2010.2070873. [Google Scholar] [CrossRef]
28. S. Bolufe, C. A. Azurdia-Meza, S. Cespedes, S. Montejo-Sanchez, R. D. Souza and E. M. G. Fernandez, “POSaCC: Position-accuracy based adaptive beaconing algorithm for cooperative vehicular safety systems,” IEEE Access, vol. 8, pp. 15484–15501, 2020. doi: 10.1109/ACCESS.2020.2967283. [Google Scholar] [CrossRef]
29. American Association of State Highway and Transportation Officials, A Policy on Geometric Design of Highways and Streets, 7th ed. Washington, DC, USA: American Association of State Highway and Transportation Officials, 2018. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools