
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Line Fault Detection of DC Distribution Networks Using the Artificial Neural Network
1 Country College of Mechanical and Electrical Engineering, Chizhou University, Chizhou, 247000, China
2 School of Electrical Engineering, Southeast University, Nanjing, 210096, China
3 College of Electronic and Information Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing, 211106, China
* Corresponding Author: Xunyou Zhang. Email:
Energy Engineering 2023, 120(7), 1667-1683. https://doi.org/10.32604/ee.2023.025186
Received 27 June 2022; Accepted 16 December 2022; Issue published 04 May 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
A DC distribution network is an effective solution for increasing renewable energy utilization with distinct benefits, such as high efficiency and easy control. However, a sudden increase in the current after the occurrence of faults in the network may adversely affect network stability. This study proposes an artificial neural network (ANN)-based fault detection and protection method for DC distribution networks. The ANN is applied to a classifier for different faults on the DC line. The backpropagation neural network is used to predict the line current, and the fault detection threshold is obtained on the basis of the difference between the predicted current and the actual current. The proposed method only uses local signals, with no requirement of a strict communication link. Simulation experiments are conducted for the proposed algorithm on a two-terminal DC distribution network modeled in the PSCAD/EMTDC and developed on the MATLAB platform. The results confirm that the proposed method can accurately detect and classify line faults within a few milliseconds and is not affected by fault locations, fault resistance, noise, and communication delay.Keywords
With the recent rapid growth of China’s economy and rapid industrial upgrading, development of power systems is faced with the dual challenges of a substantial increase in demand and the environmental protection concern. These challenges necessitate urgent improvement in the structure of the energy industry. Distributed power generation systems such as wind power and solar energy storage systems have received extensive research attention as an important form of renewable energy supply [1,2]. Moreover, energy systems based on advanced technologies such as microgrids, flexible power distribution systems, and smart grids have initiated advanced renewable energy utilization systems and innovative power generation systems. The current demands of power supply have brought about new power system challenges, such as efficient power distribution, power electronic system control, and system protection.
With the wide application of renewable energy, use of electric vehicles, demand responses, and development of the electricity market, the new power generation systems are continuously expanding their scale, which, in turn, is increasing the complexity and uncertainty of their operating state. Meanwhile, the security and stability of power systems face enormous challenges. The direct current (DC) distribution network has attracted significant attention in recent years because of its efficient and reliable power transmission capacity and environment-friendly renewable energy power generation. In addition, the widespread application of inverters facilitates the promotion of DC networks [3,4]. The following are the numerous challenges that the DC distribution network encounters concerning protection technology for its reliable operation:
1) Complicated structure, such as the AC/DC hybrid power network, strong DC and weak AC power networks;
2) Complex composition, increased use of renewable energy sources, energy storage systems, and power electronic equipment;
3) Increased uncertainty, including the uncertainty of renewable energy output and the uncertainty of load fluctuations;
4) Complex physical modeling;
5) Globalized impact of faults, such as multi-circuit DC transmission inversion and flow station lockdown, on the system.
The DC distribution network comprises several power electronic components. The rapidly increasing fault current due to the occurrence of a fault in the network can damage these components, resulting in a strong nonlinearity of the system. Therefore, fault detection should meet the protection requirements of high reliability and selectivity. Moreover, rapid fault identification is crucial to initiate the fault isolation procedure for preventing the fault from affecting the system equipment and components [5].
DC distribution networks are predominantly prone to pole-to-pole and pole-to-ground faults, which generate high current owing to the discharging of capacitors in the faulty DC line. Currently, the fault detection methods applied to DC distribution networks are divided into two categories: local measurement-based methods and communication-based methods. Particularly, local measurement-based protection methods include overcurrent protection [6] and current differential protection, whereas communication-based protection methods include differential protection [7,8]. Although the above methods provide useful solutions, some limitations exist, which need to be further improved [9,10]:
1) Although local measurement-based methods can provide rapid protection, the selectivity of local data cannot be guaranteed when the methods are applied to a two-terminal or multi-terminal network. In addition, in case of applying local measurement-based methods to multiple branches and multi-terminal networks, threshold setting of fault identification is difficult.
2) Although communication-based methods exhibit better selectivity owing to the interconnection of signals at two or more terminals, they are greatly affected by communication delay, noise, and other such factors and lack in providing rapid and sensitive protection.
With the development of computer technology, data-driven intelligent algorithms have found wide application in various industries. Because power generation system networks are complex, involving a large amount of data, they can benefit from the application of intelligent algorithms to realize effective solutions to their problems. Artificial intelligence for electric power systems is an innovative fusion of the relevant theories and technologies of artificial intelligence and the technologies and knowledge of electric power systems. Data-driven artificial intelligence solutions can be considered to overcome the aforementioned limitations of existing methods:
1) Based on panoramic global data and offline simulation data, a data-driven power system can be formed to rapidly determine the stability of the power network operation and identify the fault point and types;
2) The weak links in the power network operation process can be identified and the influencing factors can be traced;
3) Preventive control and emergency control measures can be directly formed by using operational data to manage the complex state of the power network operation.
Therefore, the application of artificial intelligence to constitute a fault identification scheme can realize a fault identification method that does not rely on system parameters but uses real-time fault current and voltage information, which is more convenient for threshold setting and to achieve real-time state detection of the system.
Currently, extensive research has been conducted on application of artificial neural networks (ANNs) for protection of power systems. Baghaee et al. [11] combined ANNs and the transient monitoring function to detect and identify faults in power systems. This approach limits the output current of the distributed energy unit and restores normal operation after the fault is cleared. Jayamaha et al. [12] used the ANN as the classifier to extract the temporal changes in the relative wavelet energy in the frequency band for constructing a feature vector of the classification, thereby providing a soft criterion for fault detection; the method was demonstrated to be fast and reliable for fault detection. Torres et al. [13] proposed an ANN-based multi-terminal DC system fault detection and location method, which could accurately detect and locate faults within a few milliseconds. Gao et al. [14] proposed a wavelet-packet-energy spectral positioning method in combination with a backpropagation (BP) neural network to overcome the limitations of a hybrid three-terminal DC transmission system, such as complex structures and difficult line fault locations. Maheshwari et al. [15] proposed a novel fault location method based on a wavelet-packet decomposition algorithm and a radial basis function neural network; they used the voltage and current components extracted by the wavelet packet as the input of the radial basis function. In a fault location process, ANNs can be used to train the model for improving the model accuracy and suppressing line position errors; however, this requires a complex sample set. ANNs comprise multiple processing units that can process information in a nonlinear and adaptive manner, simulating brain processing and memory information, and they have a significant application value for positioning and prediction. Although numerous ANN-based protection schemes have been proposed, the training time and algorithm complexity of the ANNs that have been applied pose certain constraints on the rapidity of protection. Therefore, practical engineering applications require a concise and simple algorithm that simultaneously ensures the speed and reliability of protection.
Based on the above analysis, this study researches on fault identification and location of DC distribution network systems using the ANN and proposes a fault detection method for DC distribution networks. This method extracts the fault current and uses it as the input of a BP neural network. Subsequently, for fault identification, the nonlinear fitting of the neural network obtains the difference between the predicted and actual values of current. Simulation results demonstrate that the proposed method can accurately and reliably identify faults and effectively overcome limitations of previous methods such as difficulty of identifying fault locations. The performance of the method is tested, and the effectiveness of the method in detecting and locating different types of faults is confirmed. In addition, it is verified that the method is not affected by changes in electrical parameters such as fault resistance and load.
In addition, a comparative study of similar techniques is performed considering different criteria. The main contributions of this study can be summarized as follows:
1) The main characteristics of current under fault occurrence and normal operation of DC distribution networks are analyzed and a fault detection method based on the ANN is proposed.
2) The proposed method overcomes the problems of traditional methods; that is, the problem of threshold setting faced by local measurement-based methods, and the strict data synchronization and noise immunity encountered by communication-based methods.
3) Compared with the traditional protection methods, the proposed method performs better in terms of speed of detection (less than 1 ms), accuracy (more than 98%), withstanding fault resistance (50 Ω), and robustness to noise (20 dB).
4) The method requires simple operation and implementation procedures and can be applied to fault detection for two-terminal and multi-terminal DC distribution networks.
The rest of the paper is organized as follows: Section 2 describes the DC model used to analyze the proposed scheme. In Section 3, fault detection requirements are determined, and the fault detection and location algorithm as well as the structure of the ANN used are established. Section 4 summarizes the test results and analyzes the performance of the proposed fault detection scheme. Finally, Section 5 concludes the paper.
2 Fault Characteristics of DC Distribution Network
We adopt the topological structure of a two-terminal ±10 kV DC distribution network, as shown in Fig. 1. The main protection object is the medium-voltage DC lines. We use a Δ/Yn-grounded transformer. Pole-to-ground and pole-to-pole faults are mainly considered in the DC line [16]. The overcurrent contributed by the AC grid and capacitor of the modular multilevel converter (MMC) adversely affects the DC distribution network safety during the occurrence of a fault. Thus, we primarily analyze the fault characteristics and investigate the protection strategy for faults on the DC line. The parameters of the MMC and DC lines are listed in Table 1.
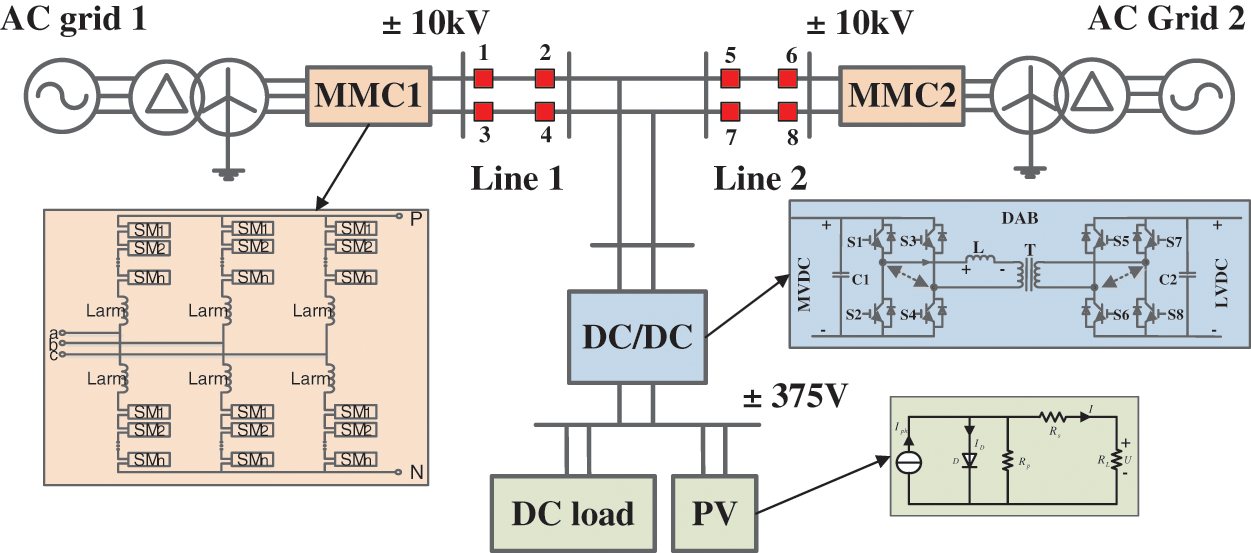
Figure 1: DC distribution network model
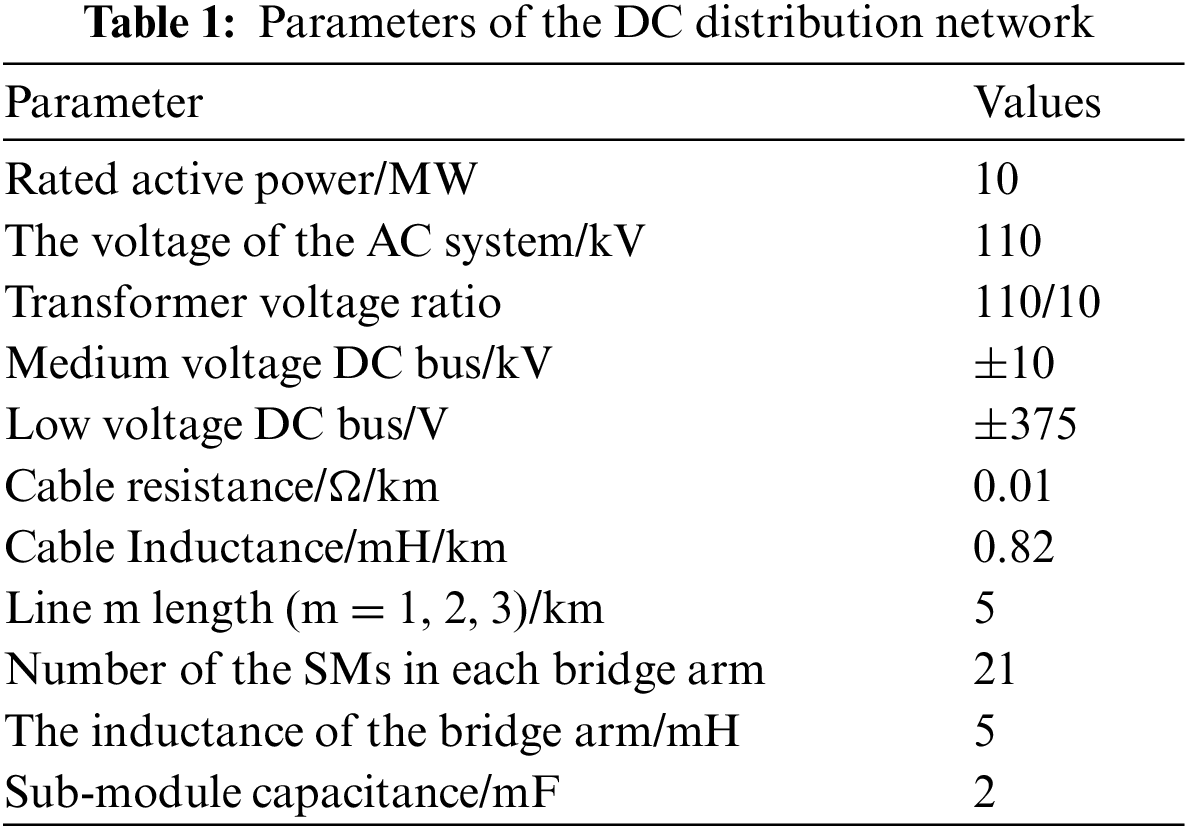
Fig. 2 shows the topology of a typical MMC. It consists of three phase units and a total of six bridge arms. Multiple power sub-modules (SM) and bridge arm inductors (Larm) are connected on the upper and lower bridge arms. When a pole-to-pole fault occurs on the DC line, the AC side injects a short-circuit current into the DC-side fault point through the SM diodes of each phase bridge arm. Moreover, the capacitor of each SM discharges to the fault point through an insulated gate bipolar transistor [17]. Before the converter is blocked, the fault current is mainly determined via the discharge current of the SM capacitor in the put-in state, and its equivalent discharge circuit is shown in Fig. 2.
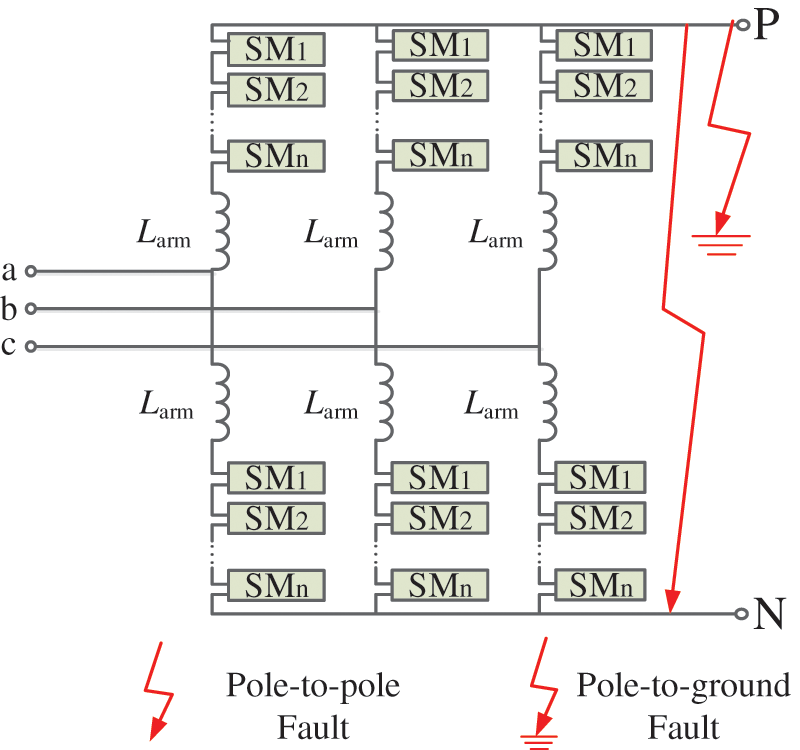
Figure 2: MMC topology and faults
The capacitance of the DC side is considerably higher than the distributed capacitance of the line, and the capacitance to the ground of the line can be ignored in distribution networks. Because the inter-electrode fault is generally metallic, and its line impedance is small, only the underdamping situation is discussed. Thus, the expressions for the DC-side fault current and the bridge-arm capacitor voltage are as follows:
where UC(0) and IL(0) are the capacitor voltage and current of the bridge arm at the time of the fault, respectively; R, L, and Ceq are the equivalent resistance, inductance, and capacitance, respectively, of the short-circuit loop.
Single pole-to-ground faults also commonly occur in DC distribution networks. Because the AC side of the system is grounded, the MMC DC side of the faulty pole at each terminal forms a loop through the fault point, earth, and the AC-side grounding point. The bridge-arm fault current has two sources: the DC component formed by the discharge of the SM capacitor and the three-phase short-circuit component injected by the AC system. The change in current after a fault is considered equivalent to a first-step response, and the fault current idc(t) can be calculated as
where idc(t) is the fault current at time t; R and Ls are the total resistance and total reactance of the loop, respectively.
Among the neural network models, the BP neural network is one of the most widely used formats in the industry domain to achieve function convergence, model identification, data compression, etc. [18]. A neural network consists of an input layer, a hidden layer, and an output layer [19]. The neuron system contains numerous neurons and has the advantages of self-adaptation and nonlinear mapping. In the process of fault detection and location using the proposed ANN-based method, the adopted neural network receives DC samples without any preprocessing. After sample training and verification, the effectiveness of the proposed method in protecting the DC system can be determined [20].
The feedforward neural network using the BP learning algorithm is generally referred to as the BP neural network. It is a widely used model in ANNs and has a complete theoretical system and learning mechanism. It stimulates the response process of human brain neurons to external environmental stimulus signals and establishes a multilayer perceptron model. The BP neural network is built on the basis of gradient descent and its working principle is based on the BP of errors through multiple iterations of learning to achieve the required target accuracy. In the process of applying ANNs, the BP neural network is one of the most widely used formats in the industry domain to achieve function convergence which are widely used in practical scenarios such as function approximation, data compression, and pattern detection.
A BP neural network uses nonlinear differentiable functions to train weights and performs fitting approximation to achieve nonlinear input-to-output mapping in any dimension. Single-layer neural networks can only be used to represent linearly separable functions. An excessive number of layers lead to overfitting. The fewer the hidden layer neurons, the more unfavorable is the BP neural network simulation effect. This study adopted a BP neural network with three layers: an input layer, a hidden layer, and an output layer. The transfer function of the hidden layer is symmetric tansig, while that of the output layer is trainable. The BP neural network is established using the neural network toolbox in MATLAB software. Fig. 3 shows the topological structure of the BP network model, which comprises the input layer, output layer, and more than one hidden layers. Neurons in each layer only have reachable paths with neurons in the immediate layer, while neurons in the same layer are not associated [21].
Figure 3: Structure of a typical BP neural network
In the BP neural network model, the input vector of the ith sample point of the input layer is set as xi = {x1, x2,…, xn} and the output as yk = {y1, y2,…, yn}.
The function of the middle layer is to convert the information received by the input layer into a solution with specific characteristics through internal self-learning and information processing. The middle layer, set as one layer and comprising the hidden nodes is connected to the previous layer via the weighted value Wij, and the next layer is connected via the threshold θij. The sigmoid function is used to achieve nonlinear mapping from the input unit to the output unit, and the activation function is expressed as
The output of the hidden layer is expressed as
where Wij is the network weight between the input layer node and the hidden layer node and θj is the threshold of the hidden layer.
The neural network prediction output is expressed as
where vji is the network weight between the hidden layer node and the output node and θk is the threshold of the output layer.
Then, the prediction error of the network model is
where tk is the target output.
The input layer node error δk is expressed as
The hidden layer node error δj’ is expressed as
where f′(x) is the derivative of f(x) and x is the expression.
When a fault occurs, the data collected in real-time are analyzed to determine the type and location of the fault, and then a tripping signal is sent to the corresponding circuit breaker. Each DC line has an ANN data analysis system, which is responsible for current data collection and fault detection. The proposed algorithm runs in a digital relay installed at the beginning of each DC line, related to a specific DC circuit breaker. The DC samples are collected and directly applied to the neural network for fault detection and location. To achieve a millisecond-level speed in detecting DC faults, a sampling rate of 20 kHz and a data window size of 1000 samples (50 ms) are selected as the optimal setting for the ANN input vector responsible for fault detection.
The BP neural network is verified by offline training. After data testing, if the network can reach a certain accuracy, this network can be considered feasible. Otherwise, the network requires to be initialized and trained again until the classification performance of the network meets the requirements. The BP neural network with a performance that meets the requirements can be integrated into distribution network protection to judge the current network operating status and the fault type and location after a fault occurs, and send the corresponding instructions to the corresponding protection circuit breaker to eliminate the fault.
The DC distribution network is modeled on the PSCAD/EMTDC platform to obtain its steady-state line current data, and the current for 1000 sampling points is predicted. The accuracy of the BP network is verified by predicting the current during the normal operation of the system. Fig. 4 shows the current output and predicted output waveforms obtained via neural network training. Fig. 5 shows the training performance; the optimal performance is obtained for a sampling number of 998 with a root means square error of 4.97 × 10−5; thus, this algorithm can be used for the protection of the power network system.
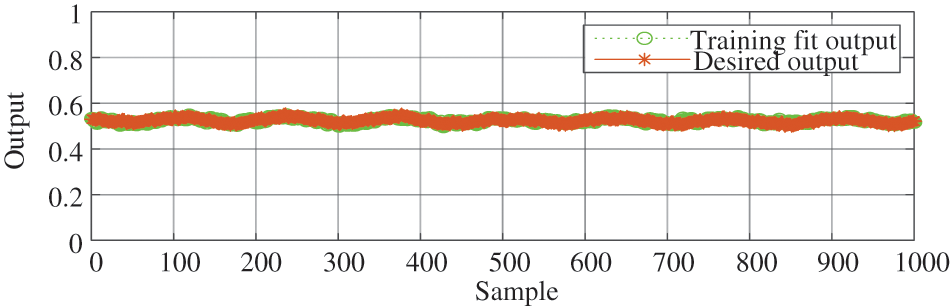
Figure 4: Training output of ANN
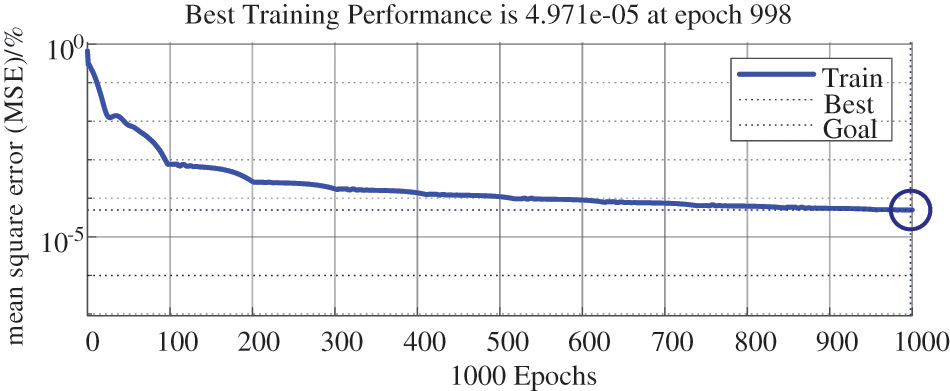
Figure 5: Best training performance
When a fault occurs, the line current increases rapidly, causing a sudden increase in the error between the predicted value of the neural network and the actual current value of the system, thereby exceeding the set threshold. Based on this feature, the collected current is input continuously to the network for training, considering certain communication and calculation errors. When the predicted mean absolute percentage error (MAPE) is greater than 100%, the protection signal is triggered to enable the action of circuit breakers at both terminals of the line, thereby isolating the fault; Fig. 6 shows the application diagram. The MAPE is calculated as follows:
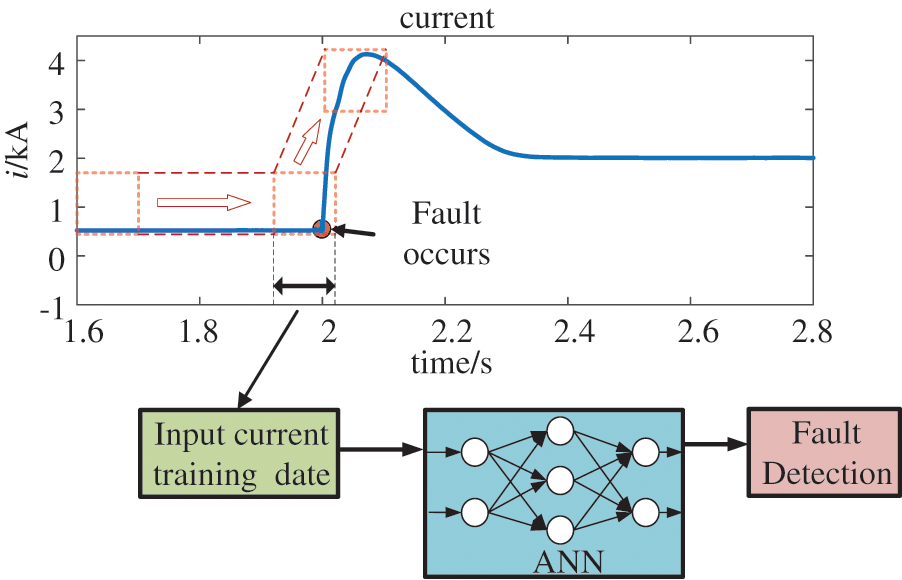
Figure 6: ANN application for fault detection
where Idesired is the real desired current value for the line, and Ipredict is the current predicted by the ANN.
The threshold selection is an open problem in such studies. In this study, the threshold is determined using the Otsu method [22] based on various simulation case studies and derived 100% using various simulation case studies. Notably, the selected threshold is constant for different DC networks and operation modes, and its behavior is almost similar in various cases. In order words, the threshold setting is not case sensitive, and it is not required to readjust for different DC networks or operation modes. The application of the selected threshold facilitates desirable results regarding accuracy and operation time.
The main types of faults in the DC distribution network, namely pole-to-pole and pole-to-ground faults, have both time and position uncertainties when they occur. Among these uncertainties, time uncertainty increases the protection system’s sensitivity and response to a fault, whereas position uncertainty requires the system to have the function of sending a trip signal to the circuit breaker of the faulty section. To improve the accuracy of the fault location, this study proposes a method for fault classification and location based on the predicted current obtained by the BP neural network algorithm. The concept of offline training and online diagnosis is adopted: when a fault occurs, it is analyzed using the real-time collected data, the type and location of the fault are judged, and a trip signal is sent to the corresponding circuit breaker. Fig. 7 shows the flow chart of the protection scheme.
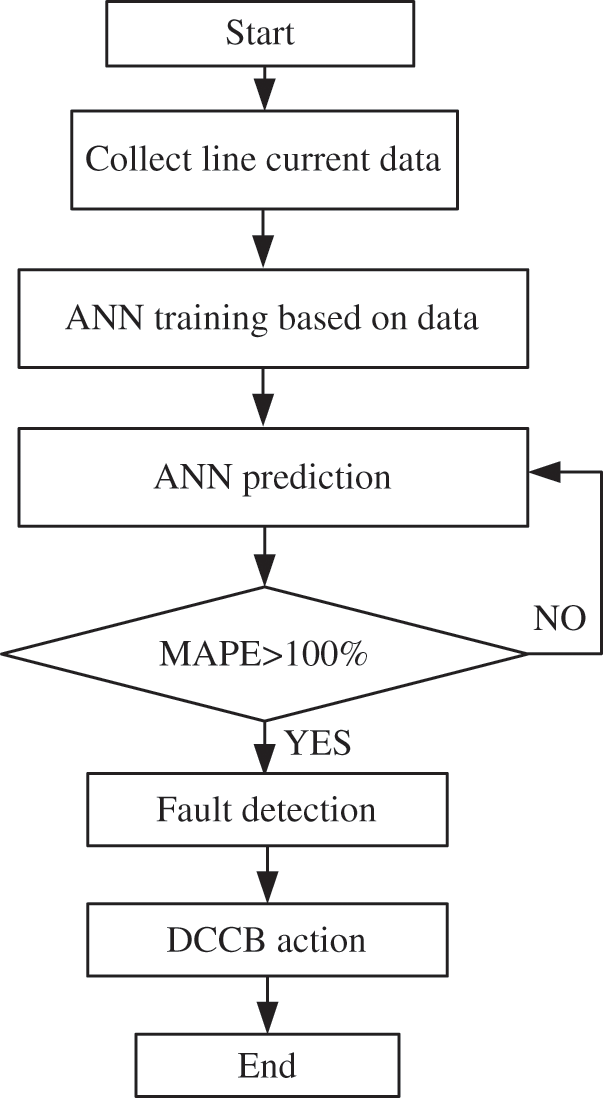
Figure 7: Flowchart of the proposed protection scheme
Based on the topology of the DC distribution network shown in Fig. 1, a simulation model was built on the PSCDAD/EMTDC platform. The DC cable was simulated using a Π-type equivalent circuit. A photovoltaic system on the low-voltage side was connected to the two active bridges through a booster circuit and then connected to a busbar on the medium-voltage side.
In the BP neural network simulation, different conditions and fault types were classified and expressed in terms of one-dimensional output current amplitudes. In the test, 1500 data sets were collected, of which 1000 were used as samples for neural network training and the remaining were used for testing. The two terminals of the line were set as terminal 1 and terminal 2, and the fault line and fault type were predicted on the basis of the current signals at both terminals. Further, the protection trigger signal was obtained according to the prediction MAPE of the current.
Fig. 8 shows the simulation results for the occurrence of a pole-to-ground fault on Line 1. The waveform indicates that after two sampling points of data (0.1 ms) from the point where the fault occurs, the protection signal was triggered, and the fault was cleared after 19 sampling points of data (9.5 ms). Because the steady-state current was used as the training sample, the predicted results obtained before the fault occurred were similar to the steady-state current. When the fault occurred, the fault current increased rapidly and only part of the training sample data changed abruptly; therefore, the predicted results were still close to the steady state data, causing a large deviation between the predicted and the desired values.
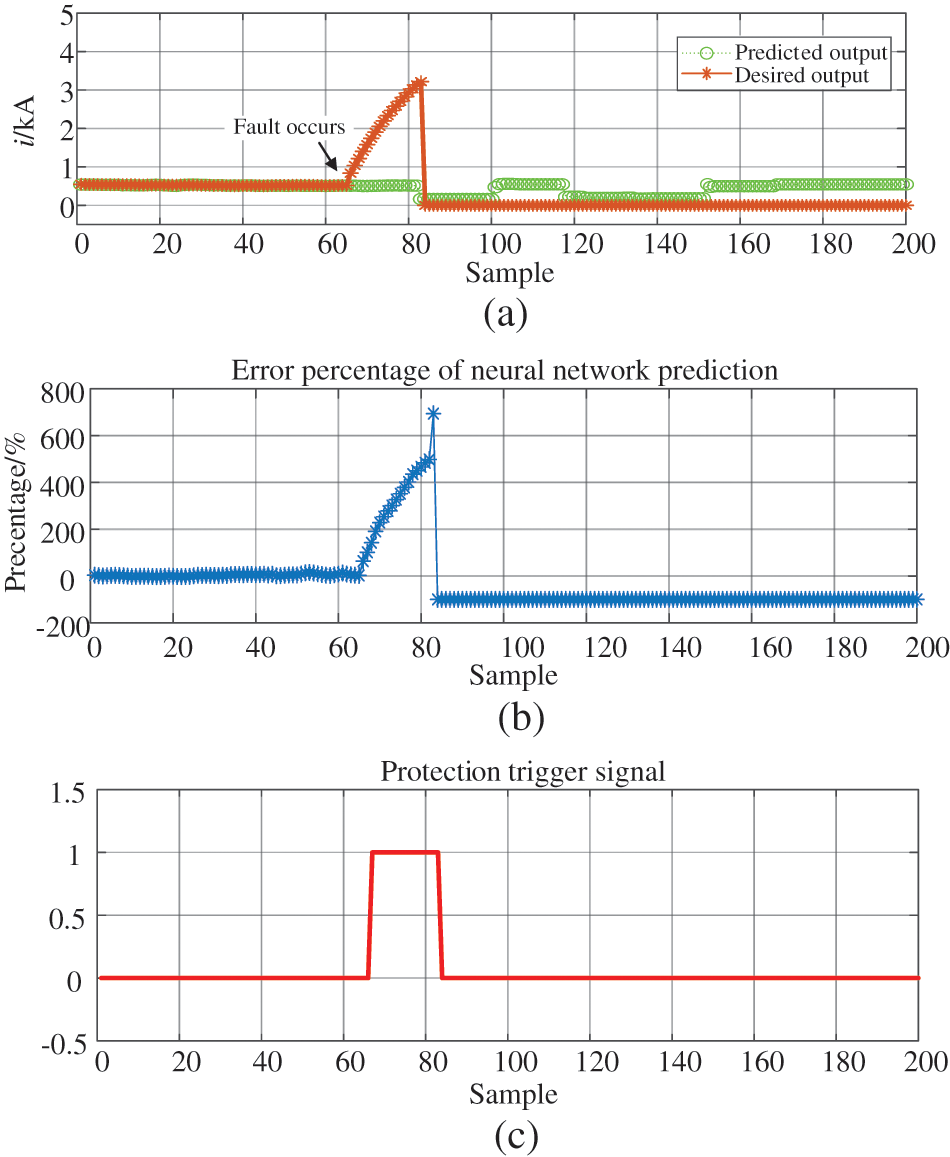
Figure 8: Fault current and output type for a pole-to-ground fault. (a) Predicted and desired outputs. (b) ANN prediction error. (c) Protection trigger signals
Similarly, the simulation results for the occurrence of a pole-to-pole fault on Line 1 are shown in Fig. 9. When the fault occurred, the fault current rapidly increased and the peak current reached 3.5 kA. Based on the prediction results, three sampling points of data were used to identify the fault information, and the circuit breaker was triggered. The fault was cleared after 13 sampling points of data (6.5 ms); this meets the speed requirement of a protection system.
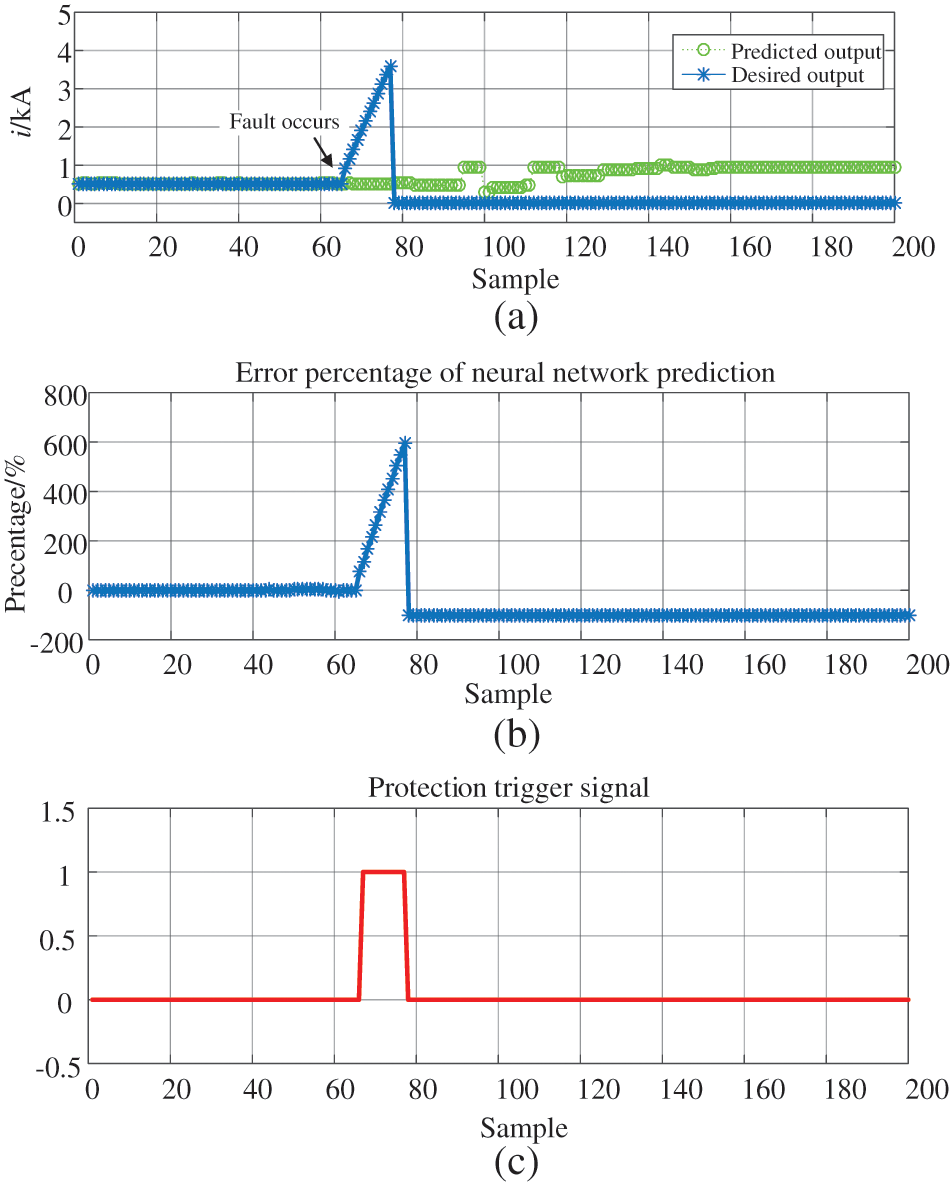
Figure 9: Fault current and output type for a pole-to-pole fault. (a) Predicted and desired outputs. (b) ANN prediction error. (c) Protection trigger signals
For pole-to-pole faults, the line currents of the positive and negative poles of the DC line were collected as training samples. The MAPE of the current on the positive and negative lines also can exceeded the threshold when a fault occurs. The simulation results of the line were similar to those obtained for the pole-to-ground fault. This clearly indicates that a pole-to-pole fault had occurred in the line and the DC circuit breakers on the positive and negative lines were triggered to isolate the fault.
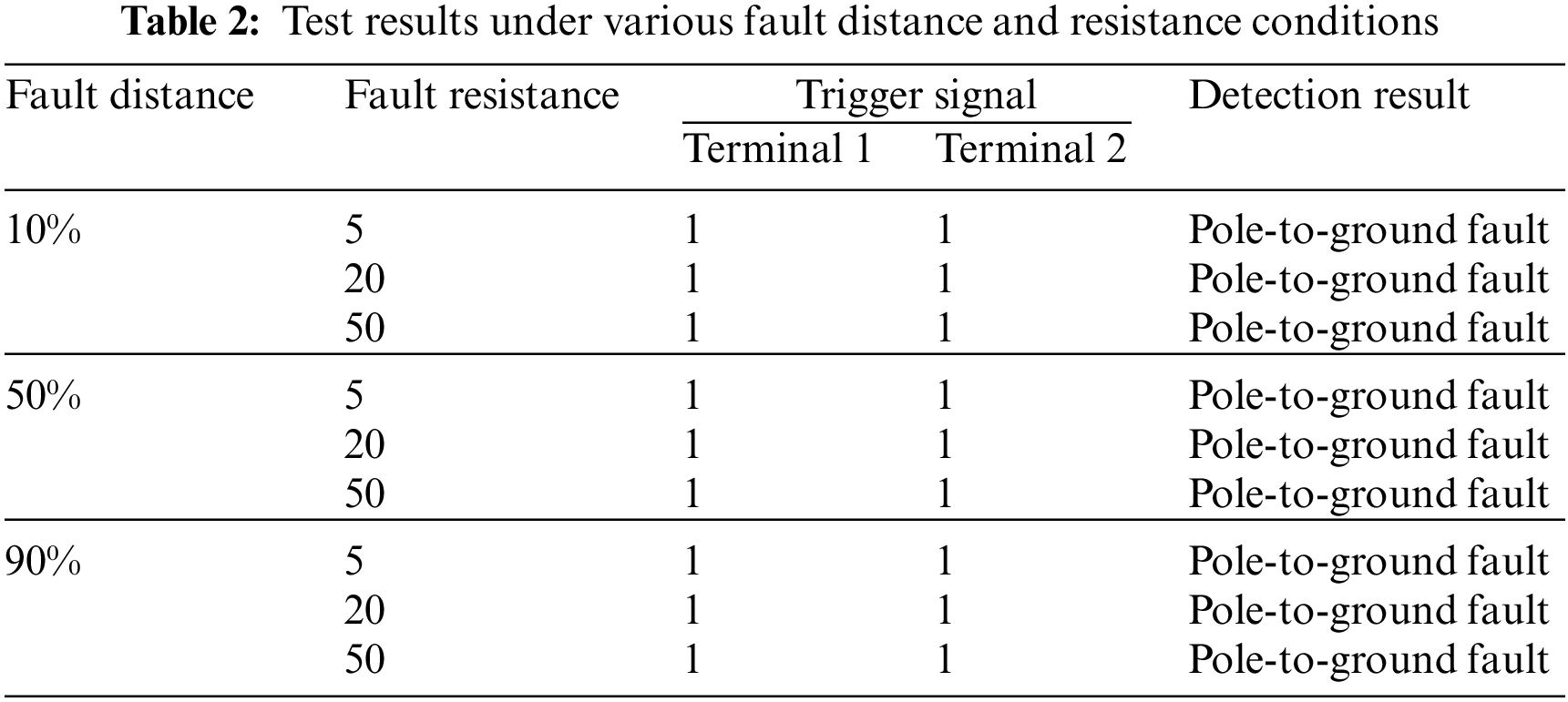
Pole-to-pole and pole-to-ground faults have similar equivalent circuit structures; therefore, the pole-to-ground faults on Line 2 were considered as an example to further verify the robustness of the proposed method. The results listed in Table 2 confirm that the protection scheme works well for all fault distance conditions. Although high resistance usually affects the magnitude of the fault current, the difference between the predicted current and the actual current does not change with the change in the magnitude of the fault current. Therefore, as the fault resistance increased, the MAPE still exceeded the predicted value, and the fault was reliably identified.
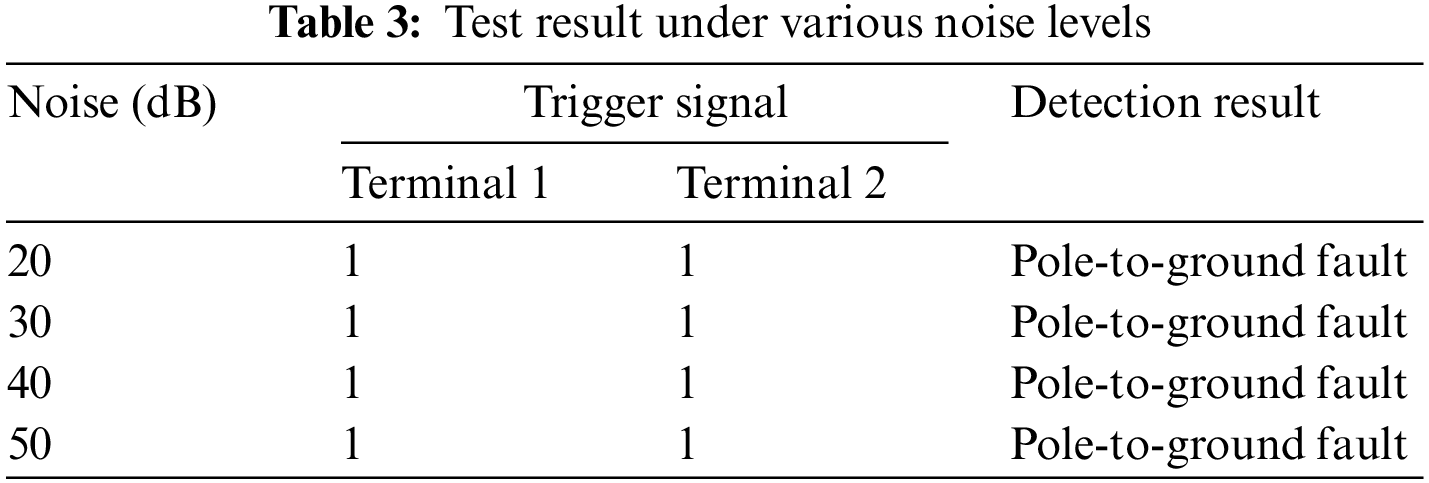
To validate the proposed method under the effect of noise, we superimposed Gaussian noise of 20, 30, 40, and 50 dB on the measurements for each test. The simulation results are listed in Table 3. All the faults could be identified using the proposed method. Noise changed the magnitude of the measured current but not the polarity or direction of the fault current. Therefore, noise has little effect on the performance of the proposed protection method.
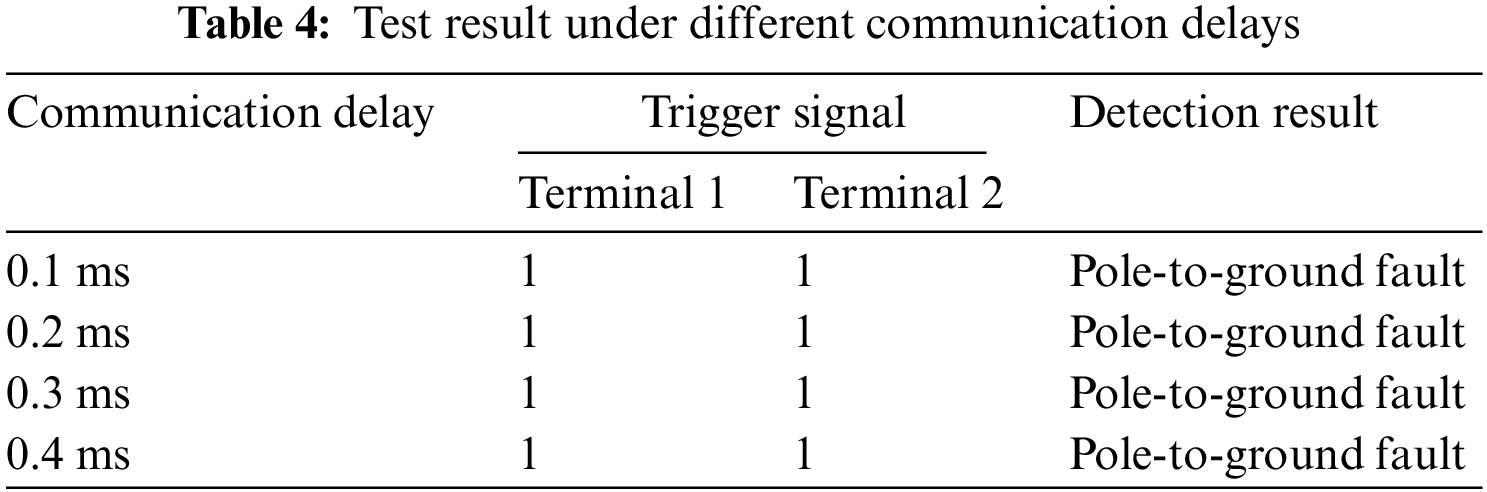
The line length of the distribution network is generally less than 40 km, and the signal transmission delay of the optical fiber is approximately 4.9 μs/km [23]. The communication delay of the fiber channel is approximately 0.2 ms. Table 4 lists the protection principles with different delays when the measured values from two remote terminals are exchanged. The simulation results indicate that the algorithm does not require strict communication, and it synchronizes and operates normally, with a delay of less than 0.4 ms.
To further verify the advantage of the proposed method over the traditional methods, its performance is compared with that of an overcurrent protection method and a differential protection method, as shown in Table 5.
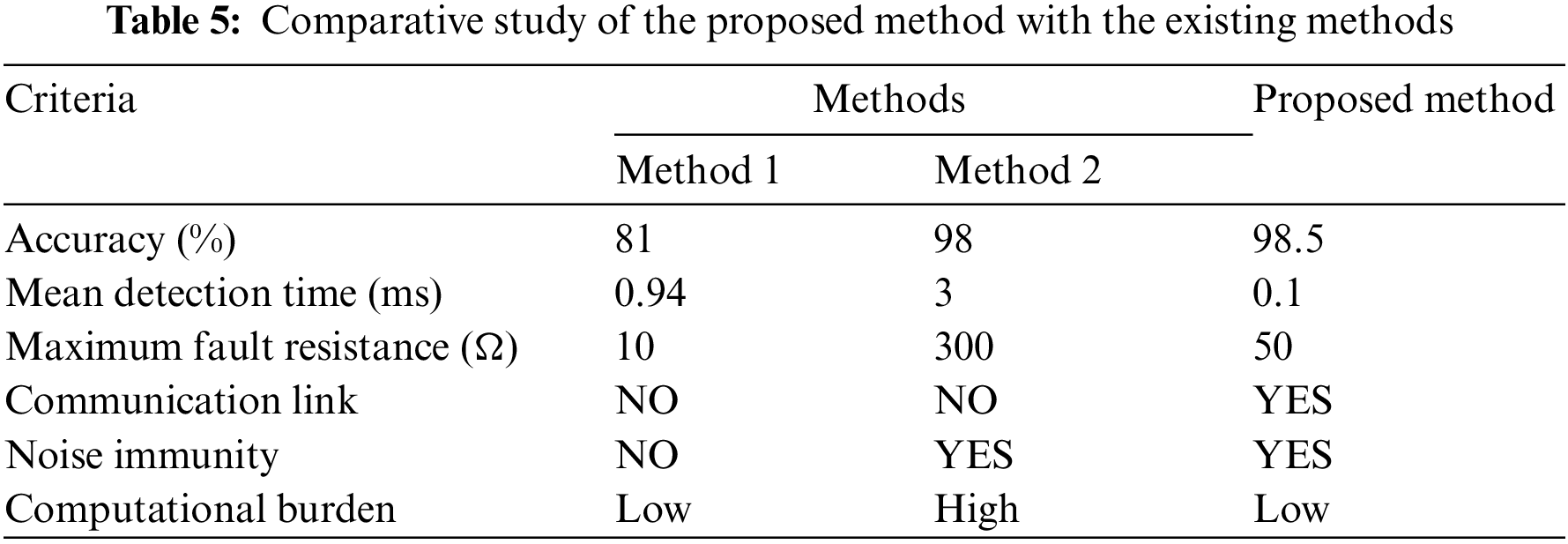
A) Method 1 [7,8]: In this approach, the first derivative of the measured current signal is utilized to identify faults.
B) Method 2 [12]: This method applies the wavelet multiresolution analysis and machine learning-based approach to characterize faults.
Table 5 lists all criteria used to compare the methods. The prediction accuracy of the methods were obtained under different fault conditions, namely fault distances of 0%, 10%, 50%, 90%, and 100% of the line length and fault resistances of 0, 5, 20, and 50 Ω. To reduce the effect of minor differences between the result of each prediction process, ten experiments were conducted under each condition to obtain accurate fault prediction. The accuracy of the proposed method exceeded those of the compared methods for the dataset considered.
The proposed method also provided considerably faster results than the other methods. The maximum fault resistance value of this method was higher than that of method 1 and lower than that of method 2. Thus, the proposed method can overcome the limitations of communication-link applications. Moreover, because the method uses simple mathematical procedures, its complexity is low. By contrast, methods 1 and 2 require highly computation-intensive processes for the protection relay owing to the use of complex mathematical operations. Furthermore, while method 2 is reliable in the presence of noise, method 1 is not. The ability to distinguish between non-fault conditions is another advantage of the proposed method over the other methods. In addition, unlike with other methods, the proposed method does not require threshold setting modification under different fault conditions.
This study proposed a fault detection method based on the ANN for pole-to-pole and pole-to-ground faults in DC distribution networks. This method uses a BP neural network to decompose the steady-state and transient characteristics of the current prediction and uses the prediction error rate to form the protection criterion. The proposed method can effectively deal with the double uncertainty of time and location of faults, and rapidly and effectively locate and eliminate faults. Notably, the BP neural network provides a smaller and simpler ANN topology, which is suitable for real applications. Compared with traditional local measurement-based methods that directly use the transient current amplitude, the ANN-based protection method may not be as fast but can detect faults within 1 ms. Meanwhile, compared with communication-based methods, the proposed method can tolerate white noise, fault resistance, and communication delay, thus meeting the sensitivity and selectivity requirements of DC network protection.
Acknowledgement: The authors wish to thank the editor and reviewers for their suggestions and thank Zaijun Wu for his guidance.
Funding Statement: This work was supported by Key Natural Science Research Projects of Colleges and Universities in Anhui Province (No. 2022AH051831).
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Jia, K., Zhao, Q., Feng, T., Bi, T. (2020). Distance protection scheme for DC distribution systems based on the high-frequency characteristics of faults. IEEE Transactions on Power Delivery, 35(1), 234–243. https://doi.org/10.1109/TPWRD.2019.2909130 [Google Scholar] [CrossRef]
2. Wang, A., Lin, S., Hu, Z., Li, J., He, Z. (2021). Evaluation model of DC current distribution in AC power systems caused by stray current of DC metro systems. IEEE Transactions on Power Delivery, 36(1), 114–123. https://doi.org/10.1109/TPWRD.2020.2975367 [Google Scholar] [CrossRef]
3. Ji, Y., Yuan, Z., Zhao, J., Lu, C., Wang, Y. et al. (2018). Hierarchical control strategy for MVDC distribution network under large disturbance. IET Generation Transmission and Distribution, 12(11), 2557–2565. https://doi.org/10.1049/iet-gtd.2017.1642 [Google Scholar] [CrossRef]
4. Wen, W., Li, B., Li, B., Liu, H., He, J. et al. (2018). Analysis and experiment of a micro-loss multi-port hybrid DCCB for MVDC distribution system. IEEE Transactions on Power Electronics, 34(8), 7933–7941. https://doi.org/10.1109/TPEL.2018.2881000 [Google Scholar] [CrossRef]
5. Wang, S., Zhou, L., Wang, T., Chen, T., Wang, Y. (2021). Fast protection strategy for DC transmission lines of MMC-based MT-HVDC grid. Chinese Journal of Electrical Engineering, 7(2), 83–92. https://doi.org/10.23919/CJEE.2021.000018 [Google Scholar] [CrossRef]
6. Guo, T., Huang, S., Wang, X. (2019). Overcurrent protection control design for DC-DC buck converter with disturbances. IEEE Access, 7(99), 90825–90833. https://doi.org/10.1109/ACCESS.2019.2926985 [Google Scholar] [CrossRef]
7. Dhar, S., Patnaik, R. K., Dash, P. K. (2017). Fault detection and location of photovoltaic based DC microgrid using differential protection strategy. IEEE Transactions on Smart Grid, 9(5), 4303–4312. https://doi.org/10.1109/TSG.2017.2654267 [Google Scholar] [CrossRef]
8. Meghwani, A., Srivastava, S. C., Chakrabarti, S. (2017). A non-unit protection scheme for DC microgrid based on local measurements. IEEE Transactions on Power Delivery, 32(1), 172–181. https://doi.org/10.1109/TPWRD.2016.2555844 [Google Scholar] [CrossRef]
9. Leterme, W., Beerten, J., Hertem, D. V. (2016). Nonunit protection of HVDC grids with inductive DC cable termination. IEEE Transactions on Power Delivery, 31(2), 820–828. https://doi.org/10.1109/TPWRD.2015.2422145 [Google Scholar] [CrossRef]
10. Su, C. H., Cheng, C. H. (2016). A hybrid fuzzy time series model based on ANFIS and integrated nonlinear feature selection method for forecasting stock. Neurocomputing, 205, 264–273. https://doi.org/10.1016/j.neucom.2016.03.068 [Google Scholar] [CrossRef]
11. Baghaee, H. R., Mirsalim, M., Gharehpetian, G. B., Talebi, H. A. (2021). OC/OL protection of droop-controlled and directly voltage-controlled microgrids using TMF/ANN-based fault detection and discrimination. IEEE Journal of Emerging and Selected Topics in Power Electronics, 9(3), 3254–3265. https://doi.org/10.1109/JESTPE.2019.2958925 [Google Scholar] [CrossRef]
12. Jayamaha, D., Lidula, N., Rajapakse, A. D. (2019). Wavelet-multi resolution analysis based ANN architecture for fault detection and localization in DC microgrids. IEEE Access, 7, 145371–145384 https://doi.org/10.1109/ACCESS.2019.2945397 [Google Scholar] [CrossRef]
13. Torres, J. A., Santos, R., Asano, P. (2018). A comparison of new methods based on ANNs for detecting and locating faults in MTDC systems. 2018 International Conference on Smart Energy Systems and Technologies(SEST), pp. 1–6. Seville, Spain. https://doi.org/10.1109/SEST.2018.8495875 [Google Scholar] [CrossRef]
14. Gao, S., Jiang, Y., Song, G., Gao, Y., Zeng, Z. (2020). A fault location method for hybrid three-terminal transmission line. 2020 7th International Forum on Electrical Engineering and Automation (IFEEA), pp. 276–280. Hefei, China. https://doi.org/10.1109/IFEEA51475.2020.00065 [Google Scholar] [CrossRef]
15. Maheshwari, A., Agarwal, V., Sharma, S. K. (2019). Comparative analysis of ANN-based FL and travelling wave-based FL for location of fault on transmission lines. Journal of The Institution of Engineers (IndiaSeries B, 100(3), 267–276. https://doi.org/10.1007/s40031-019-00370-7 [Google Scholar] [CrossRef]
16. Huang, X., Qi, L., Pan, J. (2019). A new protection scheme for MMC-based MVDC distribution systems with complete converter fault current handling capability. IEEE Transactions on Industry Applications, 55(5), 4515–4523. https://doi.org/10.1109/TIA.2019.2917360 [Google Scholar] [CrossRef]
17. Yang, J. (2012). Short-circuit and ground fault analyses and location in VSC-based DC network cables. IEEE Transactions on Industrial Electronics, 59(10), 3827–3837. https://doi.org/10.1109/TIE.2011.2162712 [Google Scholar] [CrossRef]
18. Jiao, W., Dong, K., Zhao, J., Wang, J. (2021). Transformer multi-feature intelligence protection principle based on BP neural network. 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), pp. 1–6. Wuhan, China. https://doi.org/10.1109/CIEEC50170.2021.9510185 [Google Scholar] [CrossRef]
19. Wang, Y., Liu, M., Bao, Z. (2016). Deep learning neural network for power system fault diagnosis. Proceedings of the 35th Chinese Control Conference (CCC), pp. 6678–6683. Chengdu, China, IEEE. https://doi.org/10.1109/ChiCC.2016.7554408 [Google Scholar] [CrossRef]
20. Raza, A., Akhtar, A., Jamil, M., Abbas, G., Gilani, S. O. et al. (2018). A protection scheme for multi-terminal VSC-HVDC transmission systems. IEEE Access, 6, 3159–3166. https://doi.org/10.1109/ACCESS.2017.2787485 [Google Scholar] [CrossRef]
21. Wang, S., Zhu, H., Wu, M., Zhang, W. Y. (2020). Active disturbance rejection decoupling control for three-degree-of-freedom six-pole active magnetic bearing based on BP neural network. IEEE Transactions on Applied Superconductivity, 30(4), 1–5. https://doi.org/10.1109/TASC.2020.2990794 [Google Scholar] [CrossRef]
22. Jafari, A., Faiz, J., Jarrahi, M. A. (2021). A simple and efficient current-based method for interturn fault detection in BLDC motors. IEEE Transactions on Industrial Informatics, 17(4), 2707–2715. https://doi.org/10.1109/TII.2020.3009867 [Google Scholar] [CrossRef]
23. C37.236-2013–IEEE guide for power system protective relay applications over digital communication channels. https://doi.org/10.1109/IEEESTD.2013.6504869 [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools