 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Adaptive Intelligent Control of a Lumped Evaporator Model Using Wavelet-Based Neural PID with IIR Filtering
1 Aeronautical Engineering Department, Universidad Politécnica Metropolitana de Hidalgo, Tolcayuca, Hidalgo, Mexico
2 Division of Graduate Studies and Research, Instituto Tecnológico de Pachuca, Tecnológico Nacional de México, Pachuca, Hidalgo, Mexico
* Corresponding Author: M. A. Vega Navarrete. Email:
(This article belongs to the Special Issue: Innovative Cooling Systems: Design, Optimization, and Applications)
Frontiers in Heat and Mass Transfer 2026, 24(1), 17 https://doi.org/10.32604/fhmt.2026.076095
Received 14 November 2025; Accepted 13 January 2026; Issue published 28 February 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This article presents an adaptive intelligent control strategy applied to a lumped-parameter evaporator model, i.e., a simplified dynamic representation treating the evaporator as a single thermal node with uniform temperature distribution, suitable for control design due to its balance between physical fidelity and computational simplicity. The controller uses a wavelet-based neural proportional, integral, derivative (PID) controller with IIR filtering (infinite impulse response). The dynamic model captures the essential heat and mass transfer phenomena through a nonlinear energy balance, where the cooling capacity “Keywords
The dynamic modeling and control of evaporators have been extensively studied due to their fundamental role in refrigeration and thermal energy conversion systems. Classical approaches are based on lumped parameter models, these assume spatially uniform thermodynamic states, and have proven effective for control-oriented simulation [1–5]. These models capture the dominant dynamics of heat and mass transfer using simplified energy balance equations, facilitating controller design and real-time implementation. Gruhle and Isermann [1] introduced one of the first dynamic formulations for refrigerant evaporators, while Young [3] extended concentrated and distributed modeling to rising film evaporators. Later studies, such as those of Kam and Tadé [6] and To et al. [7], explored nonlinear control strategies in multi-effect evaporator systems, highlighting the strong interdependence between process variables. In a more recent development, Canela-Sánchez et al. [8] advanced these simulation approaches by developing high-fidelity dynamic models for helical falling-film evaporators, demonstrating that accurate nonlinear modeling is essential for improving both the design and the operational performance of complex heat transfer systems.
In recent years, lumped parameter modeling has remained a practical tool for analyzing thermal systems with significant transient behavior. Mansour & Hassab [4] developed a lumped thermal model of a direct expansion (DX) evaporator under partially and fully wet conditions, allowing highly accurate prediction of its performance under varying loads. Similarly, Bojnourd et al. [9] proposed a dynamic model of falling-films with multiple effects applied to milk powder production, highlighting the importance of the nonlinear coupling between the heat and the mass transfer processes. This work demonstrates that simplified models can effectively represent the essential dynamics required for control and optimization purposes.
Beyond physical modeling, evaporator control methodologies have evolved from classic PID controllers and multivariable optimization strategies [10] to nonlinear and adaptive schemes. However, conventional controllers face limitations when the process exhibits parameter variations or nonlinear thermal behavior [6,7,11]. To address these limitations, it is proposed the use of intelligent control techniques which integrate artificial intelligence methods and wavelet-based spectral analysis.
Intelligent control approaches based on wavelets and neural networks have shown promising results in improving the robustness and adaptability of systems. For instance, Wang et al. [12] demonstrated the effectiveness of wavelet neural networks in predicting delays and adjusting PID parameters in networked control systems. Jahedi and Ardehali [13] applied a wavelet-based neural network to improve the energy efficiency of decoupled HVAC systems by decomposing transient temperature and airflow signals. Similarly, Khan and Rahman [14] proposed a self-tuning neuro-wavelet controller for permanent magnet synchronous motors, demonstrating superior adaptation and disturbance rejection capabilities compared to conventional schemes. More recently, Kanungo et al. [15] developed a wavelet-based adaptive fuzzy PID controller for BLDC motors, achieving fast and stable responses under non linear conditions. In more recent work, Liu et al. [16] advanced this adaptive framework by implementing a B-spline wavelet neural network (BSWNN) control for motor-driven systems. Their approach utilizes a novel gradient descent algorithm to dynamically update the wavelet parameters, ensuring robust tracking performance and stability even under significant system uncertainties and actuator saturation constraints.
Motivated by these advances, the present work proposes an intelligent adaptive control strategy for improving the dynamic behavior of evaporator systems operating under nonlinear thermal conditions. The approach integrates a lumped-parameter transient model of the evaporator with a Wavelet-based neural PID architecture enhanced by an IIR filtering layer. The Wavenet structure provides online gain adaptation capable of capturing nonlinear temperature dynamics, while the IIR filter ensures smooth and stable gain evolution by attenuating rapid oscillations typical of adaptive schemes.
This formulation is consistent with established lumped-parameter modeling frameworks employed in the literature, where evaporator dynamics are represented using homogeneous temperature assumptions and dominant heat–mass transfer phenomena are captured through simplified energy balances [17,18]. Within this modeling approach, the cooling capacity term
In the context of refrigeration applications, the evaporator forms one of the principal components of the vapor-compression cycle—alongside the compressor, condenser, and expansion valve—responsible for absorbing heat from the secondary fluid [19]. This work focuses on improving the control of this subsystem by employing a Wavelet-neural PID structure designed to regulate evaporator outlet temperature through compressor-frequency modulation. The detailed model formulation, simulation platform, and comparison with a classical auto-tuned PID controller are presented in the following section.
Fig. 1 shows a vapor-compression refrigeration cycle, which is an essential thermodynamic system in refrigeration and HVAC (heating, ventilation, and air conditioning) applications. The system consists of four components that process the refrigerant in a closed cycle: the compressor compresses the low-pressure vapor refrigerant, increasing its pressure and temperature; the condenser cools and condenses the vapor into a high-pressure liquid; the expansion valve reduces the pressure and temperature of the liquid, converting it into a mixture of liquid and vapor; and the evaporator completely evaporates the refrigerant by absorbing heat, returning it to the initial state to restart the cycle.
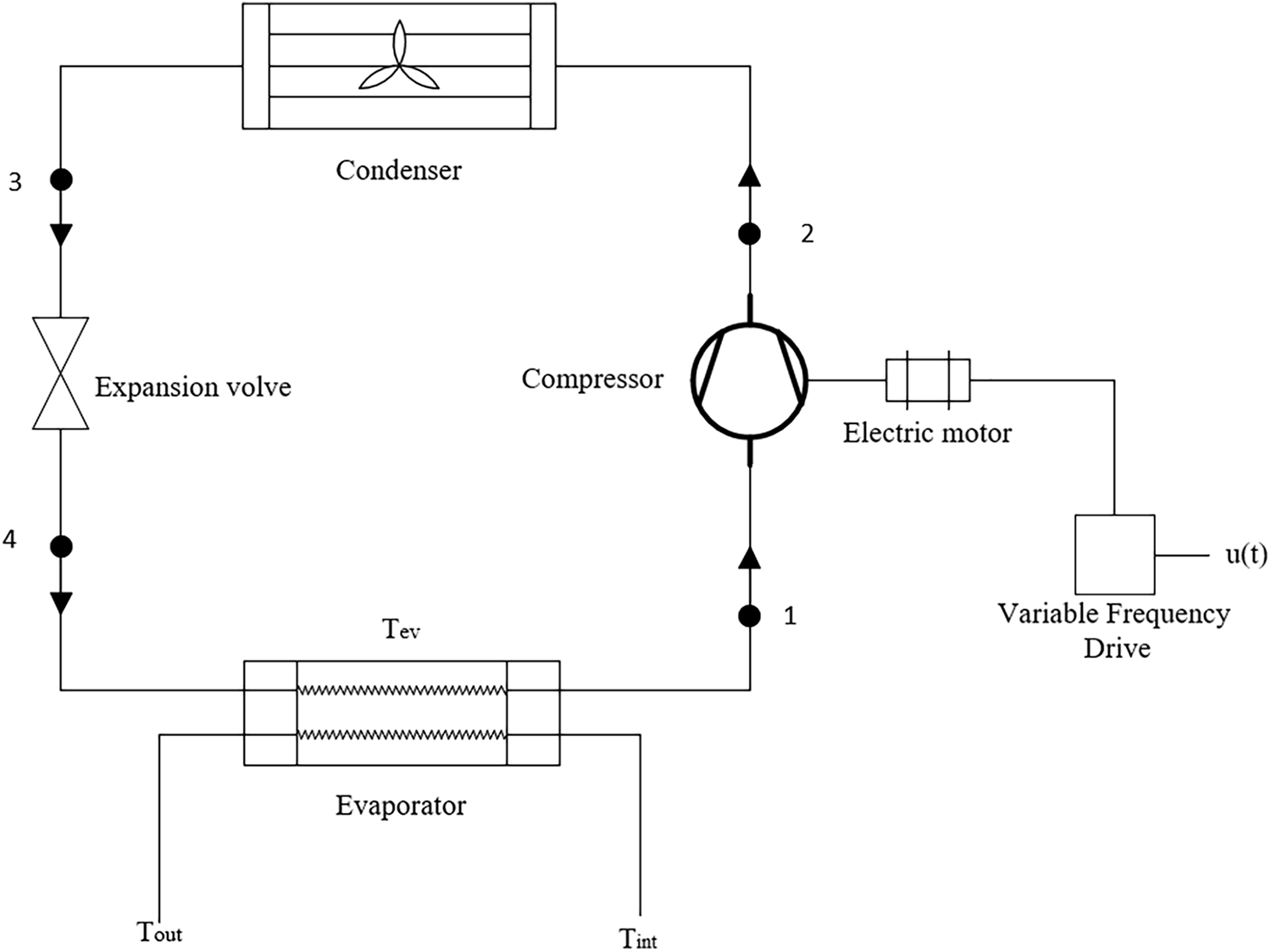
Figure 1: Schematic diagram of the cooling system.
The control design is based on a lumped-parameter dynamic model of the evaporator. This modeling approach treats the heat exchanger as a single control volume with a uniform temperature (
where
2.2 Proposed Variables and Values
The parameters used in the simulation were selected based on typical values reported in the literature for small-scale evaporators (refrigeration and air conditioning systems). Table 1 summarizes the adopted values.
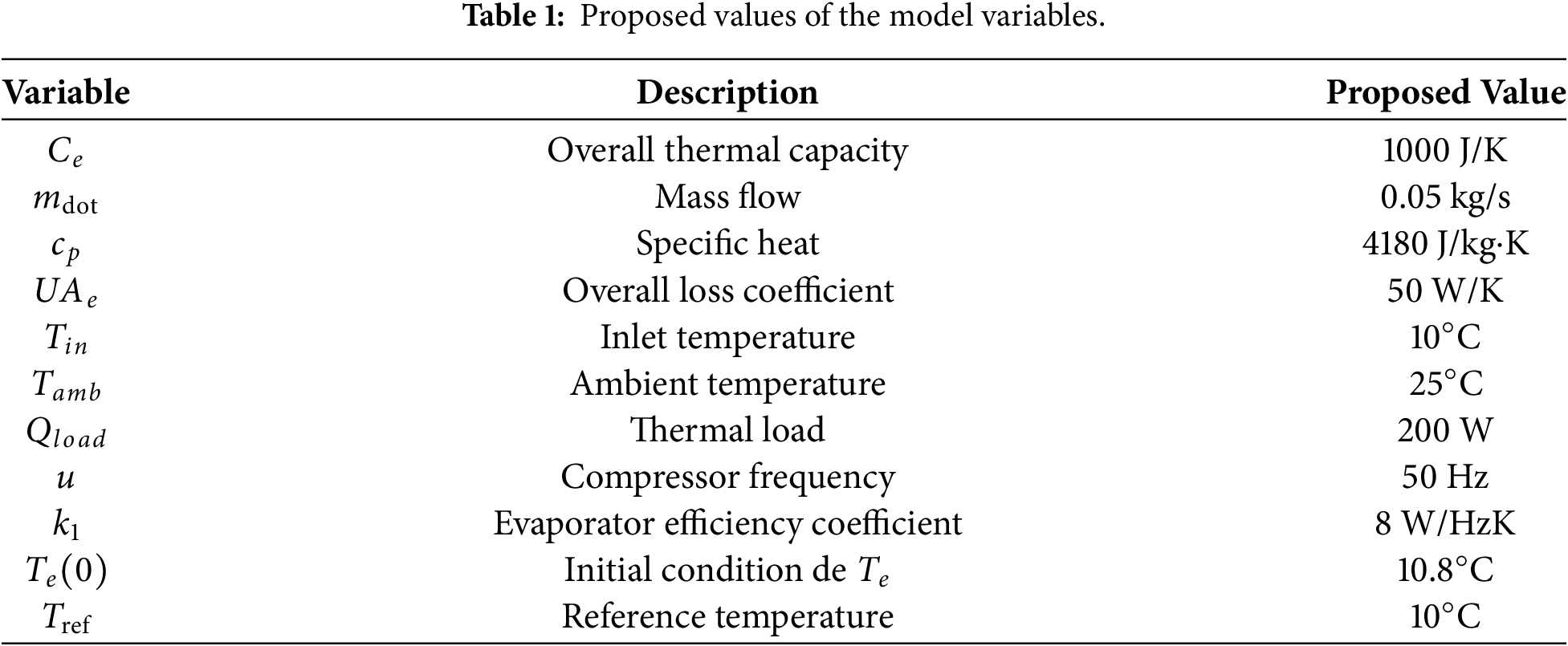
The proposed values are justified as follows:
• Overall thermal capacity
• Mass flow
• Overall loss coefficient
• Temperatures
• Thermal load
• Coefficient
Several authors propose simplified models of cooling power as a function of compressor frequency and temperature difference in the evaporator, since this type of approximation allows the dynamic performance to be represented in a compact way [22,24]. Under this approach, the following expression is adopted:
where
To estimate the value of
and with a typical thermal jump of
the evaporator is capable of supplying approximately
representative value of partial loads in light refrigeration equipment [23].
Substituting these values into the proposed model:
it is obtained:
this value is inserted for Simulink simulations, as it falls within the expected range for the overall efficiency of a small evaporator under nominal conditions [22,24].
2.4 Initial Condition and Reference Temperature
To determine the initial conditions of the outlet temperature
Substituting the cooling capacity model
The terms are grouped as follows:
Finally, clearing
Substituting the proposed values:
Physically, establishing
• The fluid inlet temperature is also
• In compact evaporators with low flow rates and moderate loads, the difference between the inlet and outlet temperature is usually less than
• Since the dynamic model does not consider additional losses due to refrigerant expansion or sub-cooling, a reference equal to the inlet temperature represents a stable and physically plausible equilibrium point for validating the performance of the Wavenet PID controller under nominal conditions.
2.5 Model Simplifications and Limitations
The proposed lumped evaporator model was developed under several simplifying assumptions to enable a tractable, yet representative, dynamic description suitable for control design. The model assumes uniform thermodynamic properties and flow conditions throughout the volume of the evaporator, neglecting spatial gradients of temperature, pressure, and refrigerant quality. The phase equilibrium between liquid and vapor is considered instantaneous, and thermal losses to the surroundings are neglected. Moreover, the thermophysical properties of the working fluid are treated as constant or evaluated under average operating conditions.
These simplifications allow the model to capture the dominant dynamics of the heat exchange process while maintaining computational efficiency, which is essential for real-time adaptive control. Nevertheless, they also introduce certain limitations. The model cannot fully represent distributed effects such as poor two-phase flow distribution, local dry-out phenomena, or transient heat transfer delays. Although the present study relies on numerical simulation via MATLAB/Simulink, the utilized lumped-parameter model is rigorously derived from fundamental conservation principles. The parameters and initial conditions listed in Table 1 are selected to represent a nominal operating point typical of small-scale evaporators found in literature. Consequently, these simulations serve as a critical proof-of-concept to validate the learning capability and transient stability of the proposed adaptive Wavelet-PID controller. Verifying that the algorithm can successfully converge and stabilize the system from these initial conditions without inducing dangerous oscillations or instability is a mandatory safety prerequisite prior to any physical deployment in a real refrigeration cycle.
3 Wavelet-Based Neural Proportional Integral Derivative (PID) Controller with IIR Filtering
The system being evaluated corresponds to the adaptive control of the evaporator outlet temperature, using a Morlet wavelet-based neuronal PID scheme. The goal is to regulate
3.1 Morlet Wavelet-Based Adaptive PID Controller Formulation
The control structure is based on the classic PID equation:
In the proposed approach, the gains
Each neuron in the Wavenet uses the Morlet activation function:
The approximate output of the neural network is expressed as:
where
Online learning of parameters is carried out according to the gradient-descent adaptation law:
where
3.2 IIR Filter Coupled to the Wavenet Network
To smooth out rapid variations in adaptive gains generated by the Wavenet network (
where:
•
•
•
•
This filtering ensures smoother adaptation of the gains, preventing abrupt oscillations that could induce overshoots or noise in the control signal
3.3 Wavelet Neural Network Structure and Learning Parameters
The adaptive controller employs a Wavelet Neural Network (WNN) with three neurons in the hidden layer, using wavelet activation functions to represent the nonlinear mapping between system states and the control signal. The initial parameters and learning rates are summarized in Table 2.
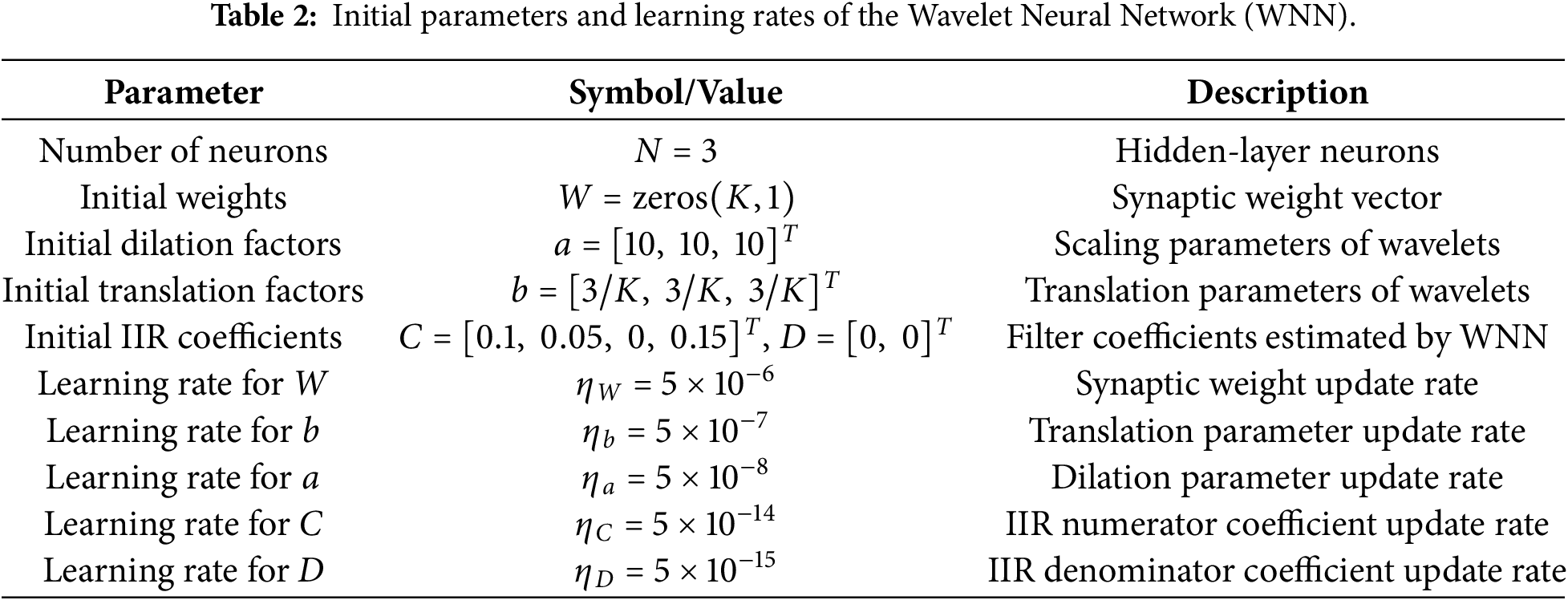
Each neuron has an adjustable synaptic weight
The adaptation process follows a gradient-based learning algorithm that minimizes instantaneous control error. Different learning rates are assigned to each parameter group to balance convergence speed and stability. The IIR filter coefficients (
The option auto-tuning was used for a PID(S) block in Simulink, with the same mathematical equation shown in Eq. (11) to obtain the optimal parameters. The resulting values are shown in Tables 3 and 4:
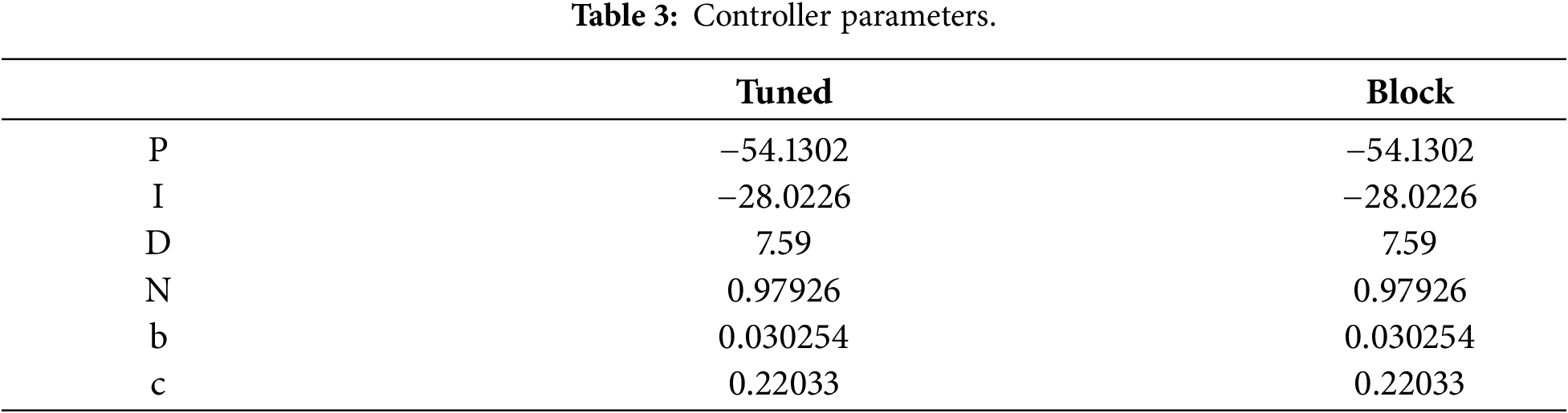
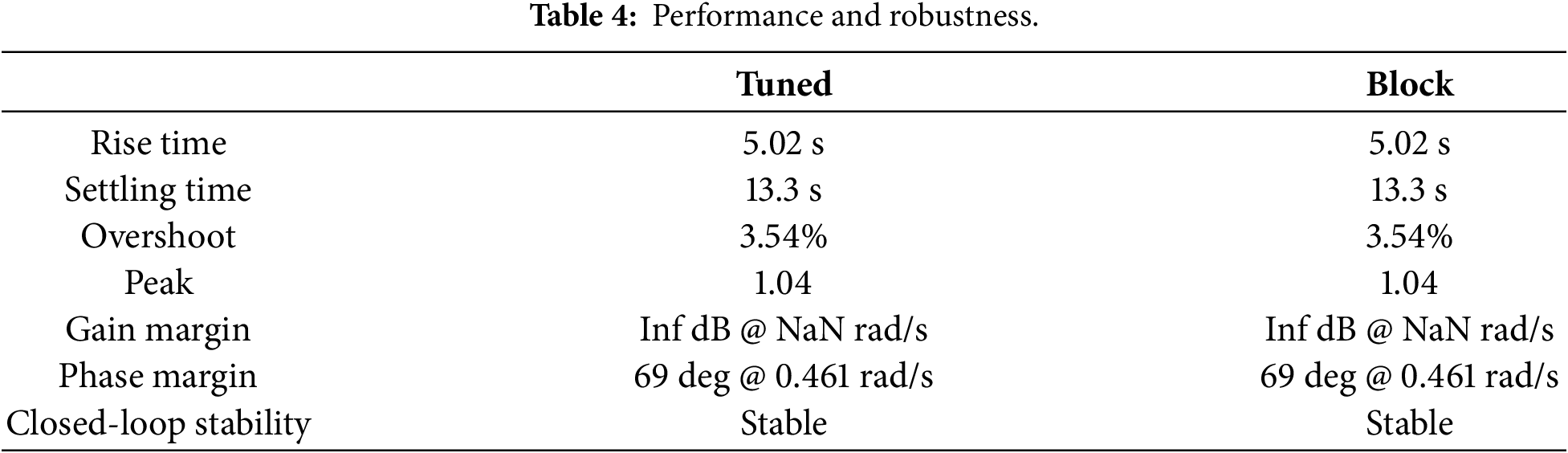
These results show that the tuned PID achieves fast response times and closed-loop stability, while the conventional PID block performs slower due to the limitation of initial parameters.
The simulation results presented in this section correspond to a single deterministic execution of the proposed evaporator control model. Because the dynamic equations are purely deterministic and do not include stochastic components or measurement noise, the simulation produces identical results under the same initial and boundary conditions. Therefore, the reported results are representative of the intrinsic dynamic behavior of the system, and statistical dispersion measures such as mean values, standard deviations, or error bars are not included. This deterministic approach enables a clear assessment of the transient and steady-state performance of the control strategies without the influence of random variability. It should be noted that the current study focuses exclusively on numerical validation; future work will address experimental implementation of the proposed PID-Wavenet with IIR filtering to verify its real-time performance under physical uncertainties and external disturbances.
4.1 Morlet Wavelet-Based Adaptive PID Controller Simulation Results
Fig. 2 shows the temporal evolution of the outlet temperature
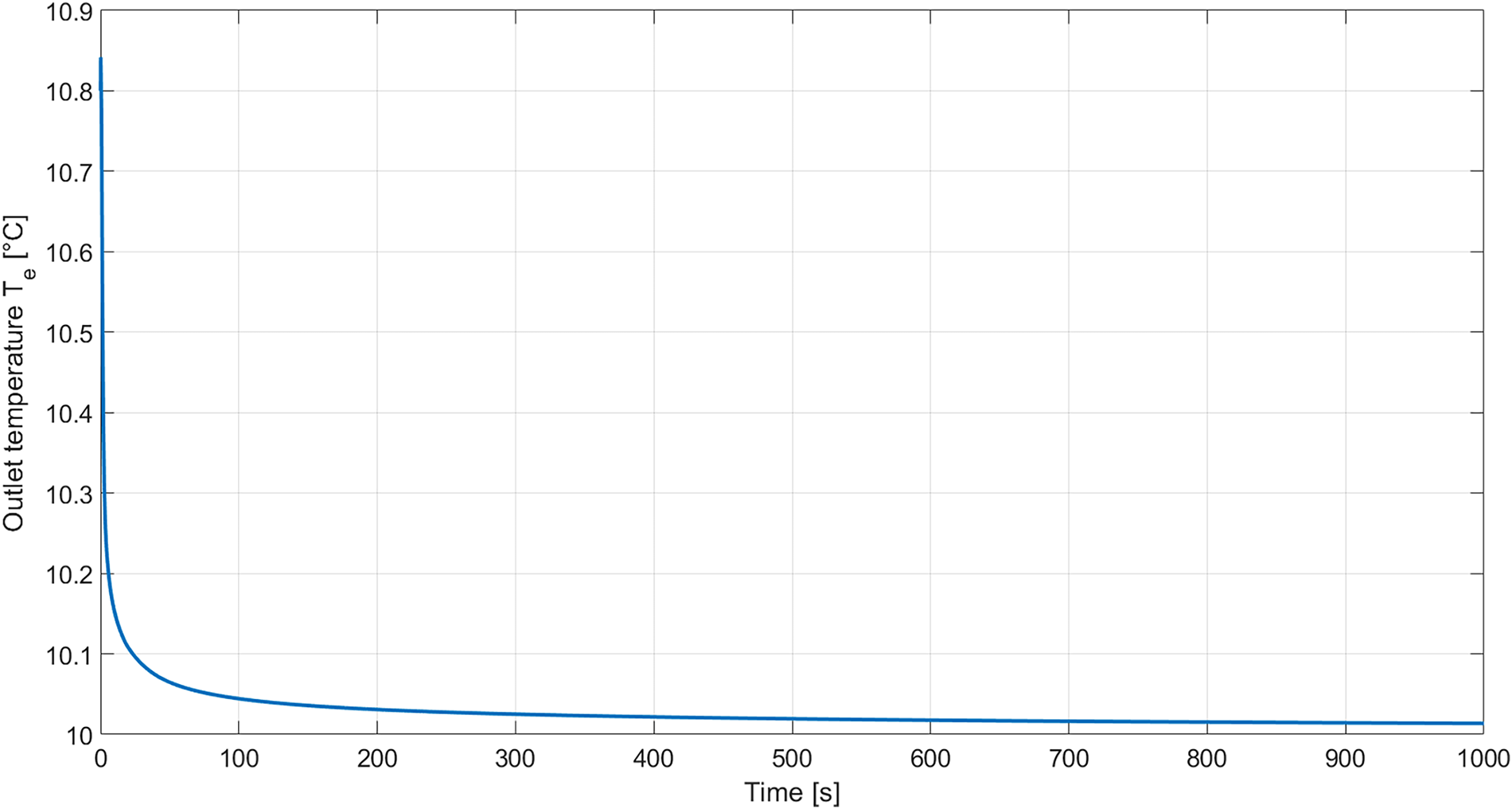
Figure 2: Evolution of the outlet temperature
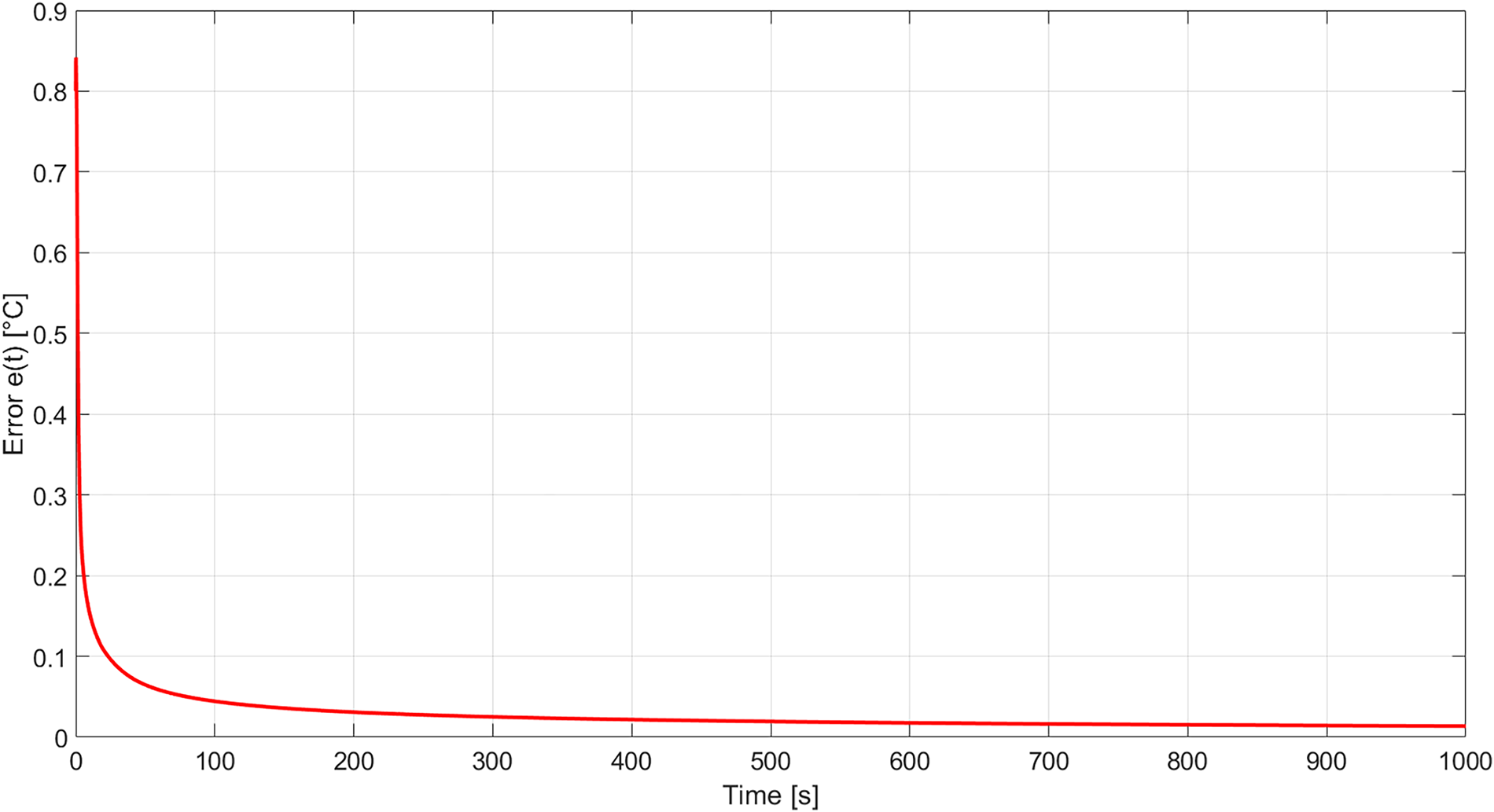
Figure 3: Tracking error
Fig. 4 presents the control signal
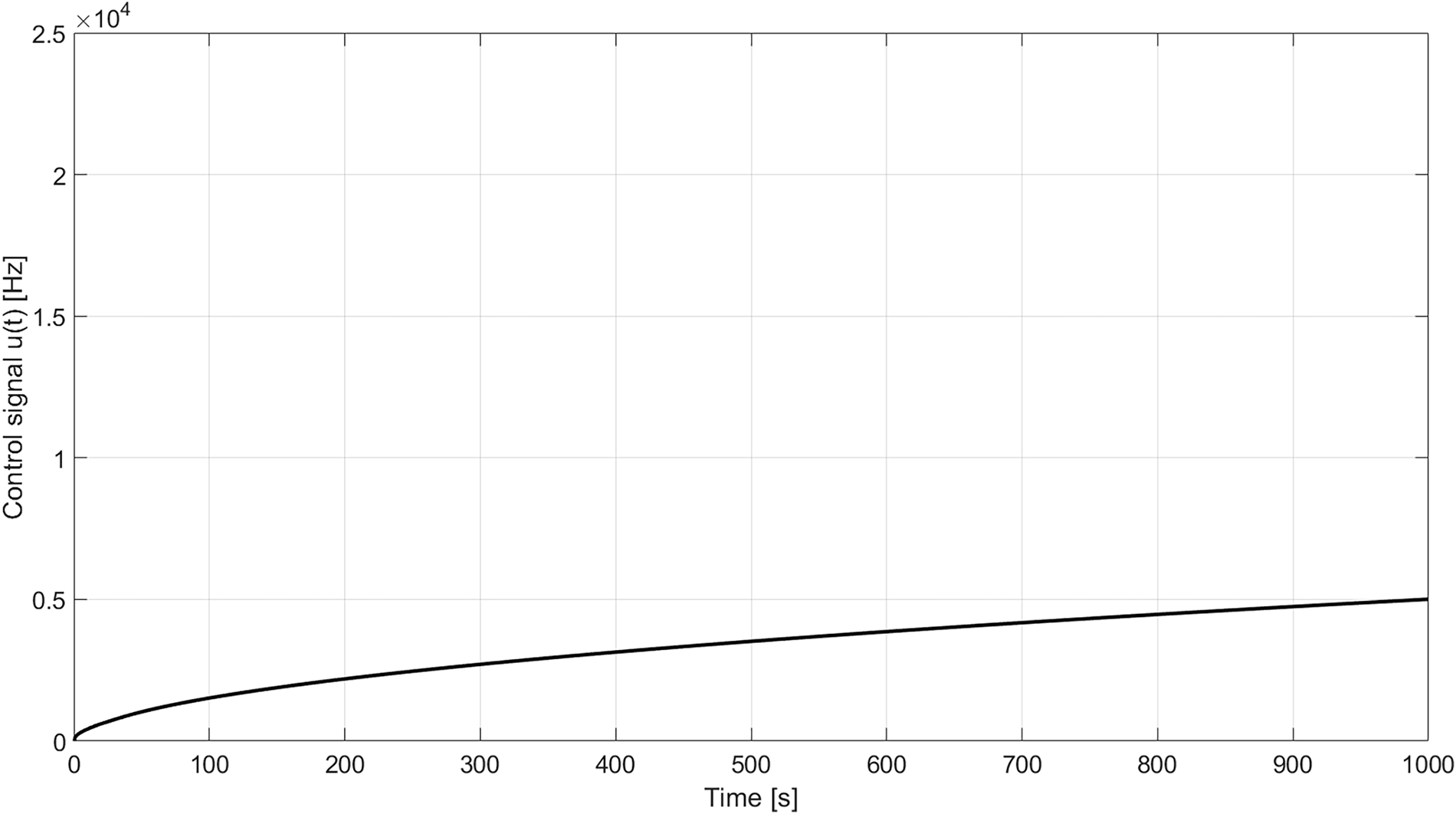
Figure 4: Control signal
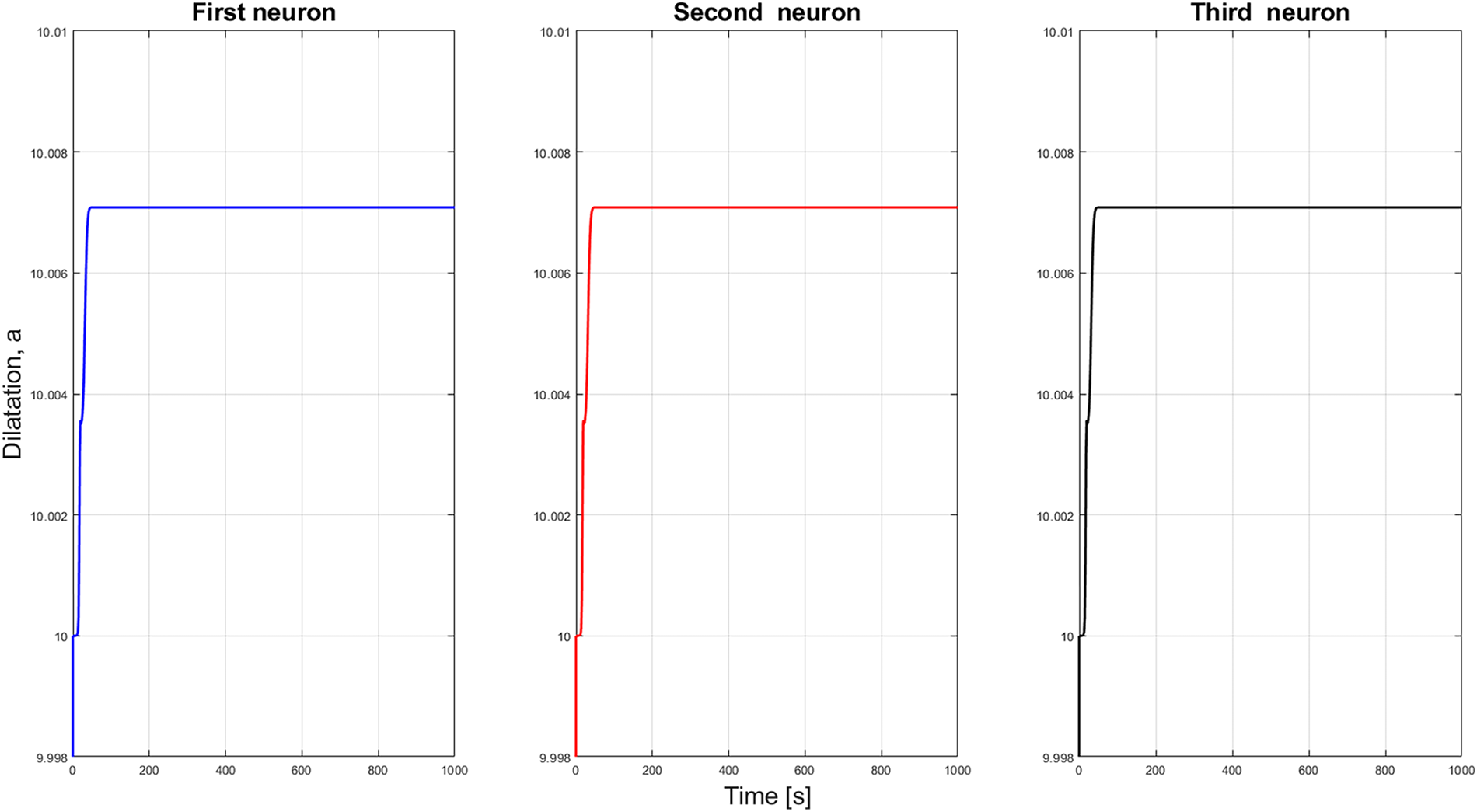
Figure 5: Evolution of the dilation parameters
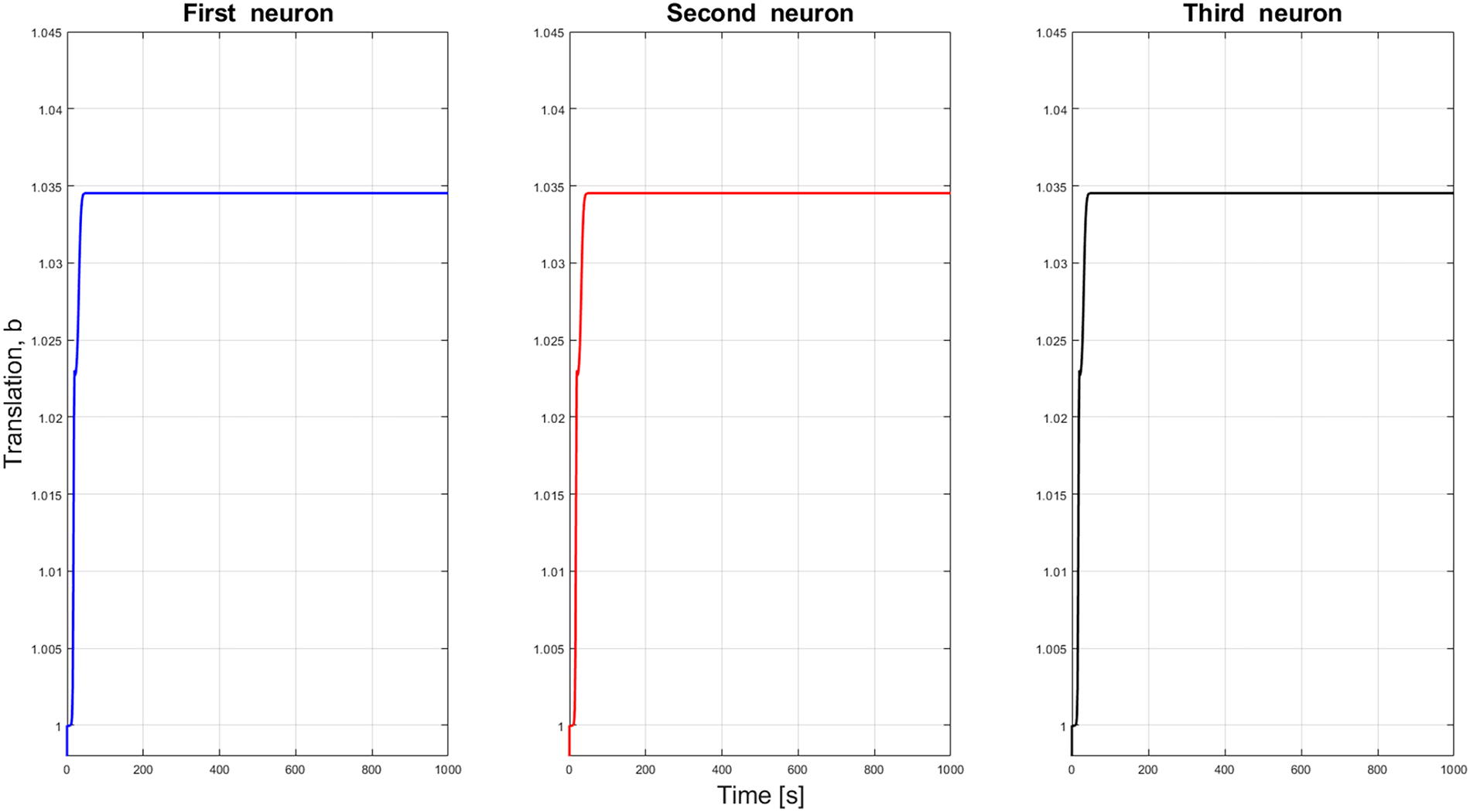
Figure 6: Evolution of the translation parameters
Fig. 7 reflects the evolution of the weights
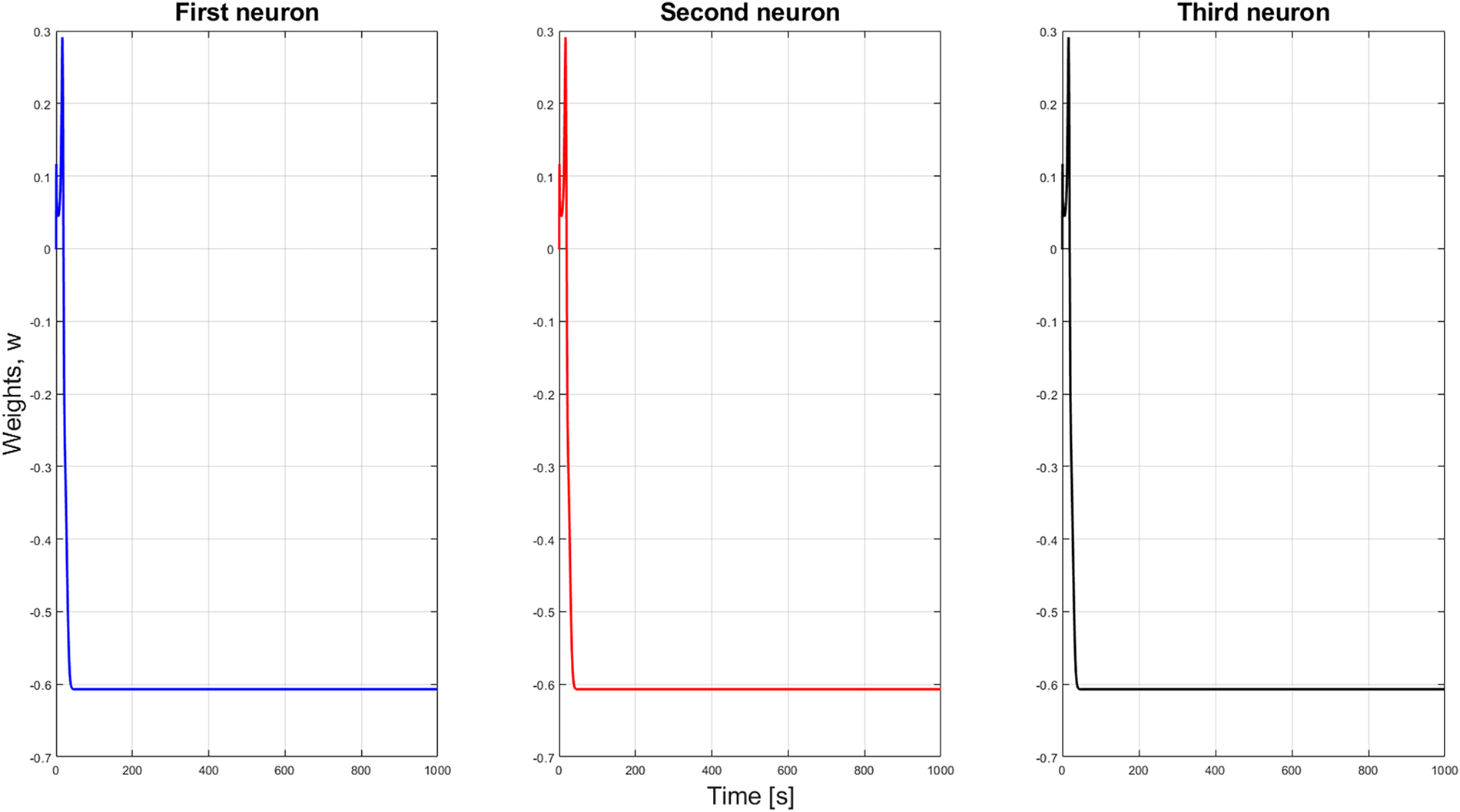
Figure 7: Evolution of the weights
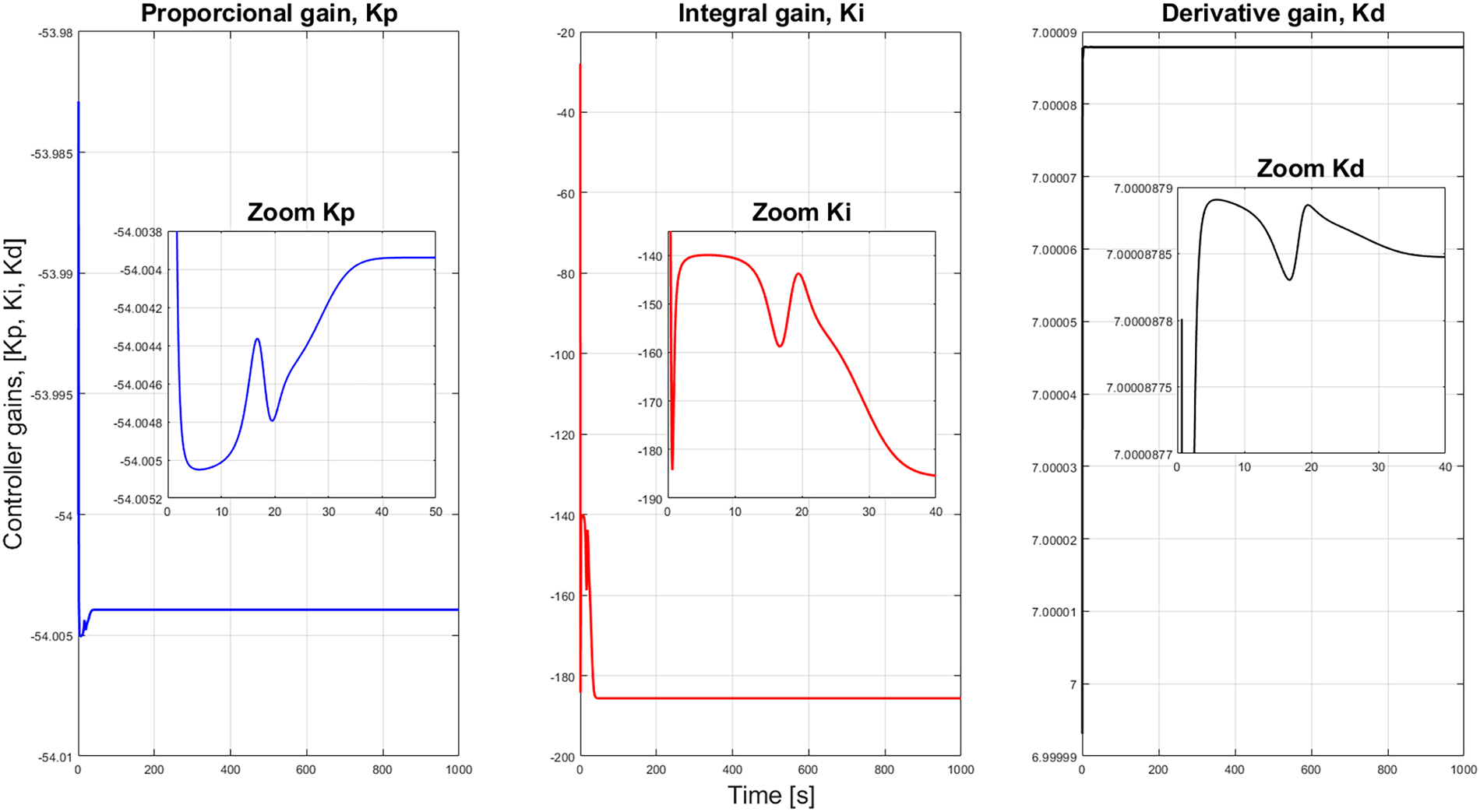
Figure 8: Adaptive gains
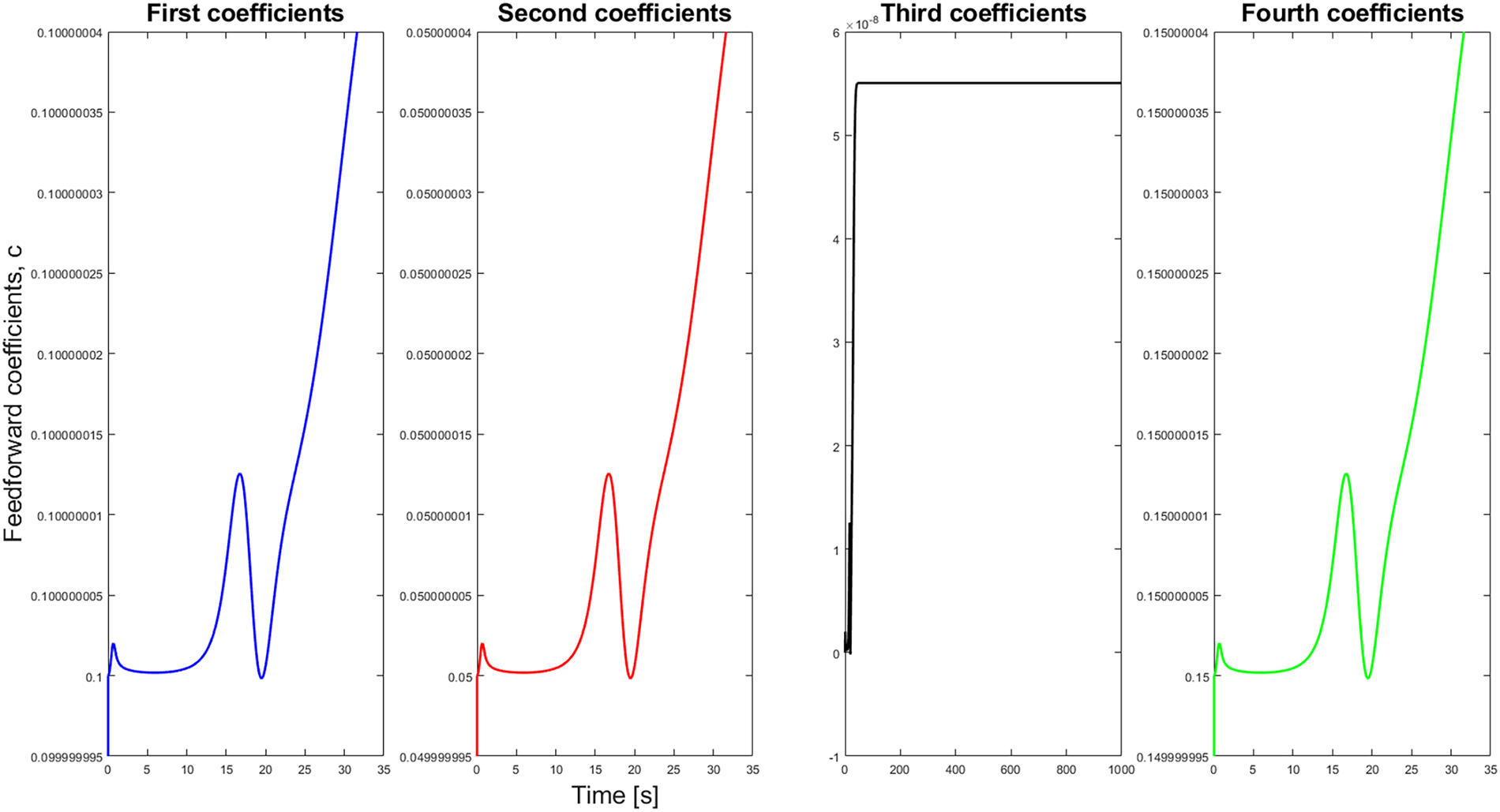
Figure 9: Feedforward coefficients
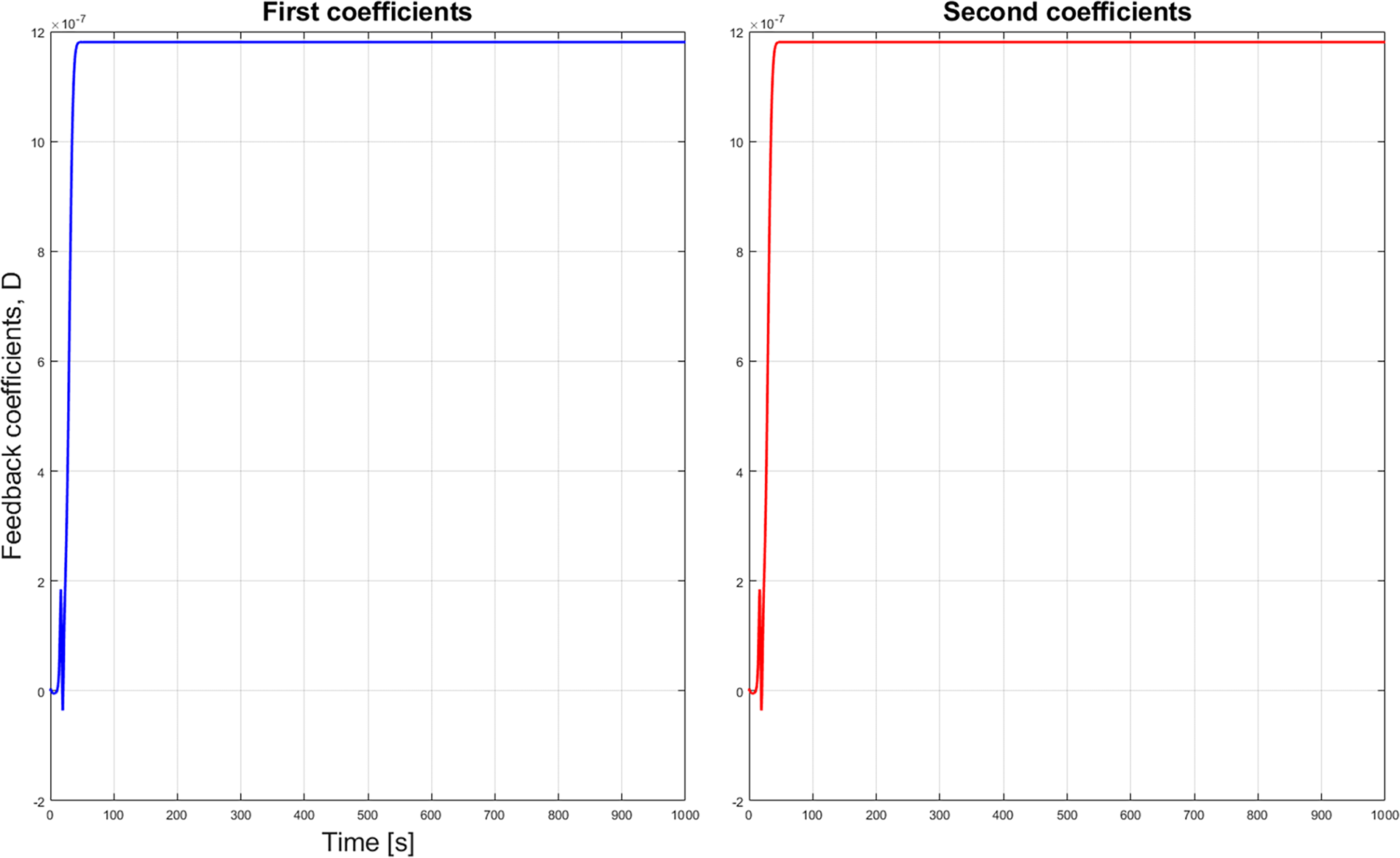
Figure 10: Feedback coefficients
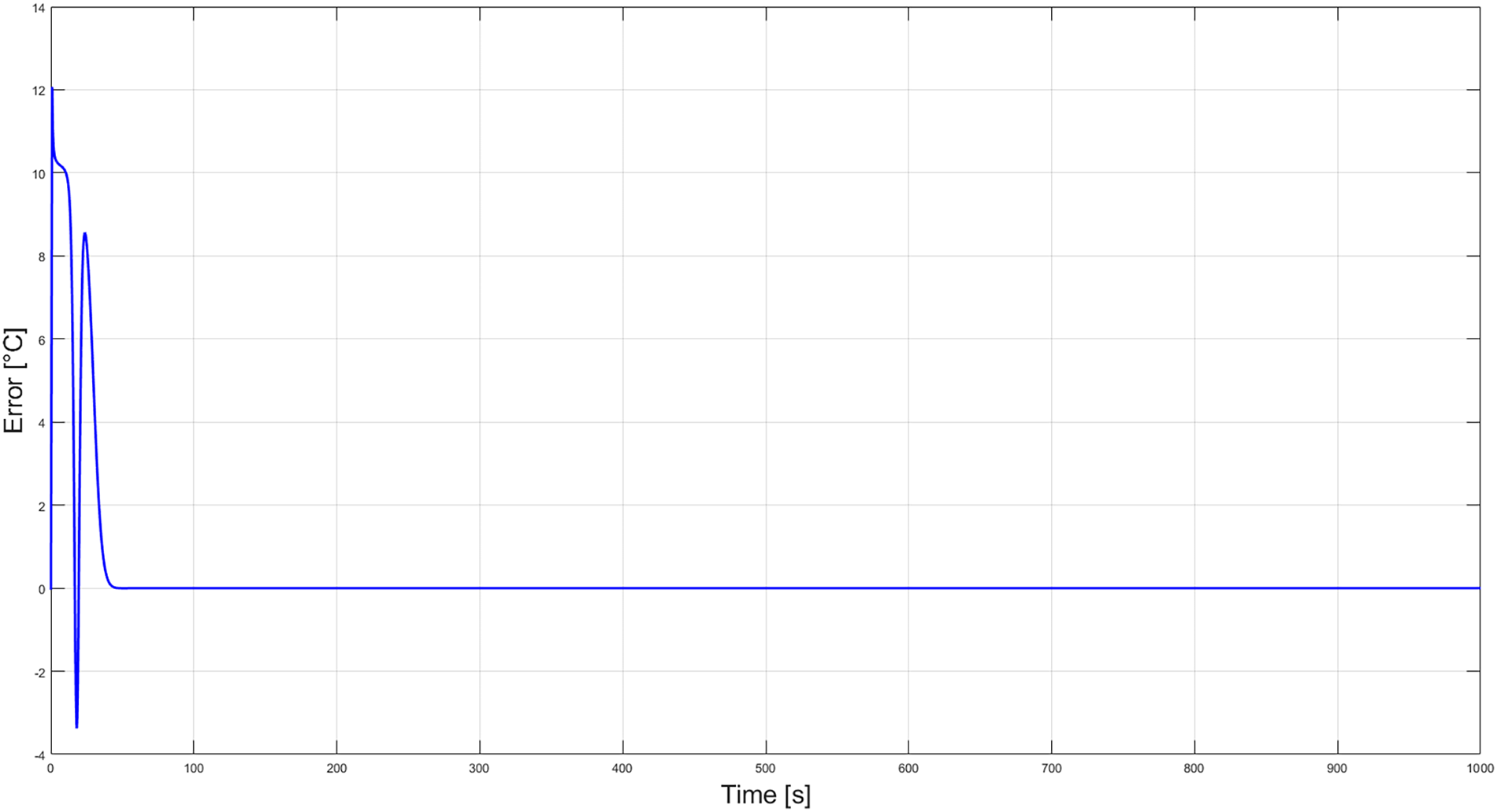
Figure 11: Model identification error
4.2 Classical PID Controller Simulation Results
Outlet temperature
Fig. 12 shows the evolution of the evaporator outlet temperature over time. It can be seen that
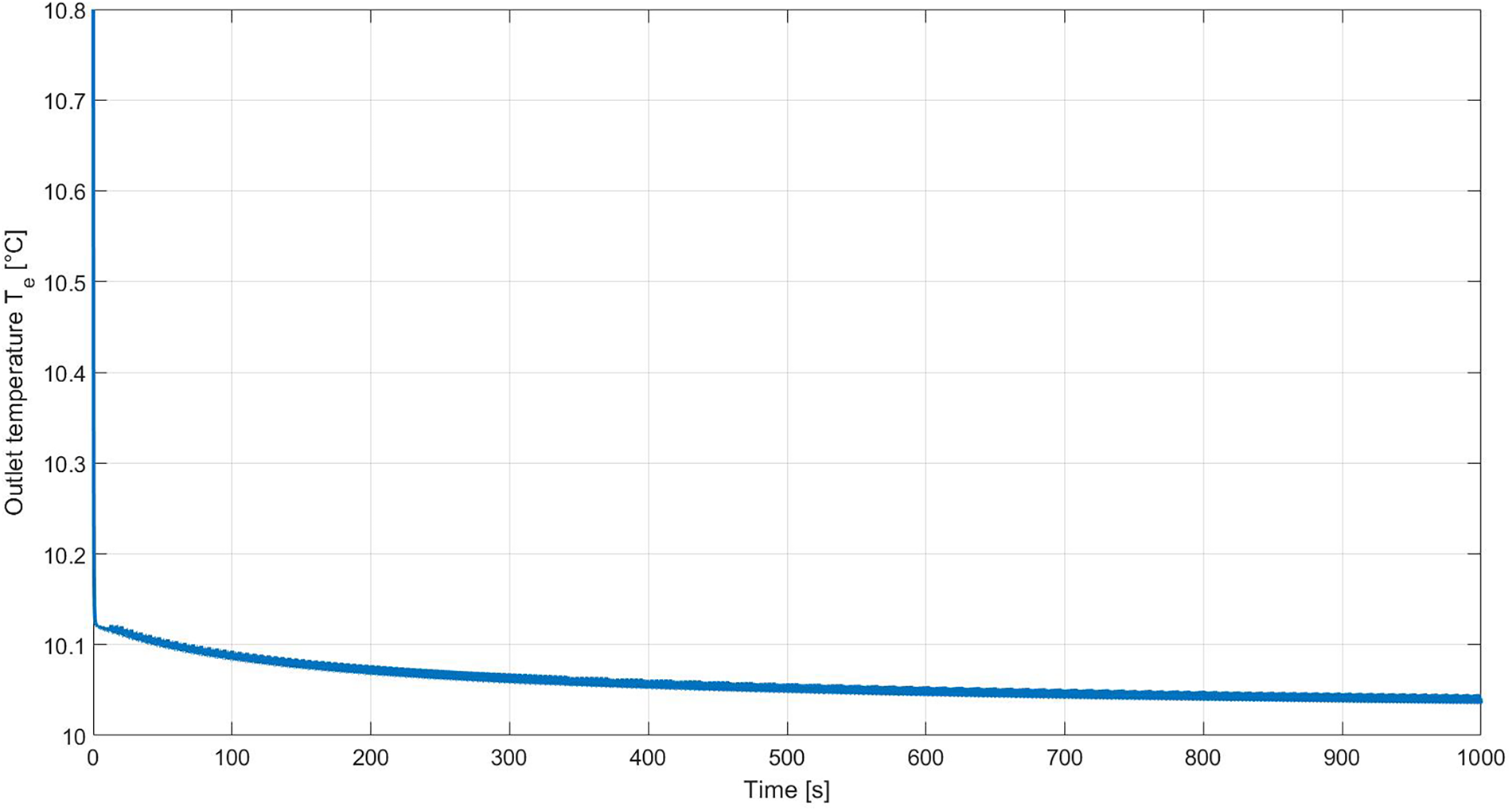
Figure 12: Evaporator outlet temperature.
• The initial temperature
• As
• The temperature finally stabilizes at the reference, confirming that the system reaches a stable thermal equilibrium.
In summary, the figure shows that the PID controller manages to regulate the output temperature efficiently and stably.
Tracking error
Fig. 13 shows the evolution of the error
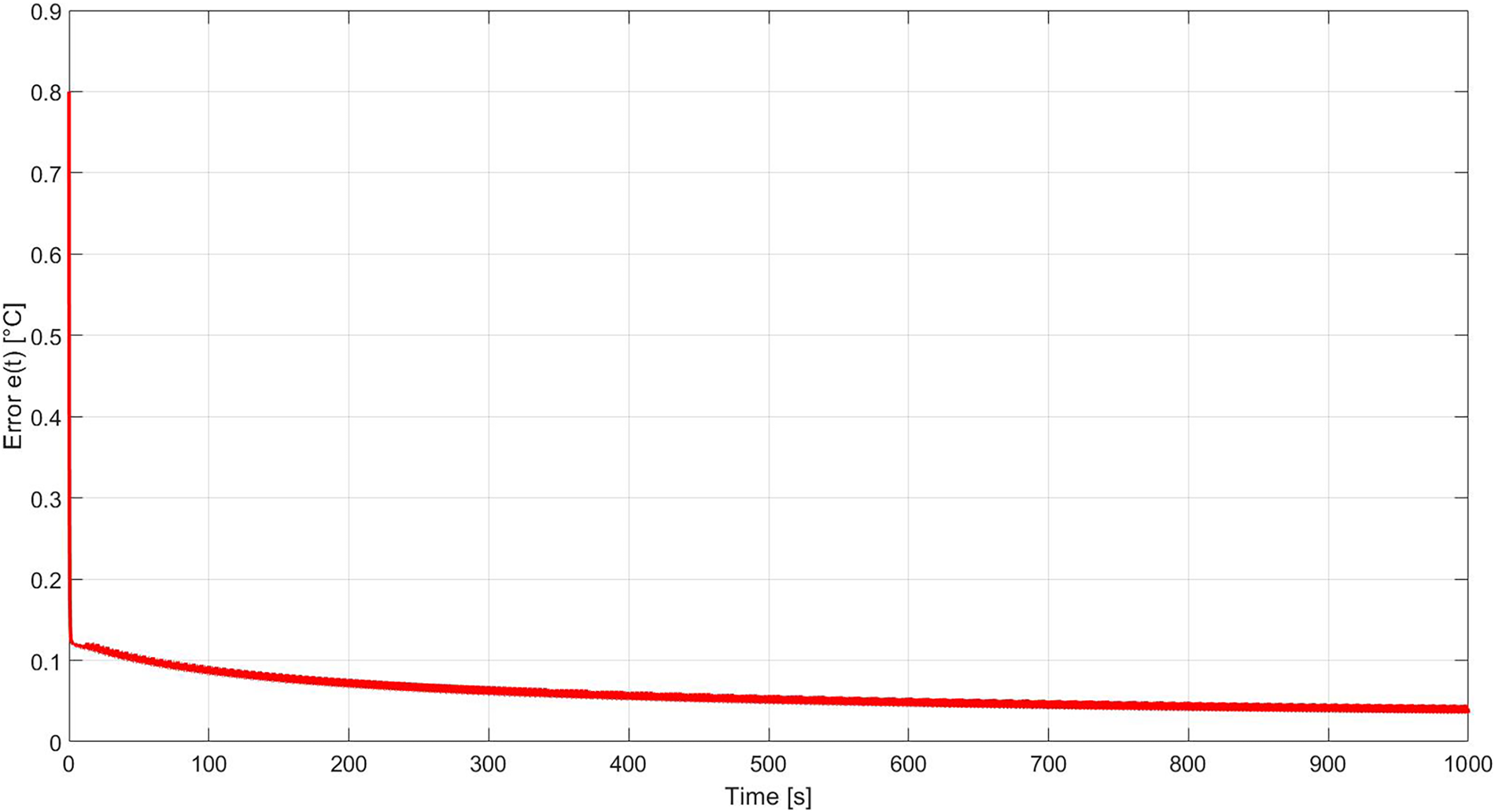
Figure 13: Measurement error between the desired and actual temperature at the evaporator outlet.
• The initial error triggers a rapid PID action to reduce the deviation from the reference.
• As the error decreases, the PID action is progressively adjusted to keep the controlled variable close to the reference.
• Finally, the error is reduced to almost zero, demonstrating that the PID achieves effective reference tracking.
In summary, the error decreases steadily, reflecting the effectiveness of the PID in controlling the evaporator.
Control signal
In Fig. 14, the control signal is displayed
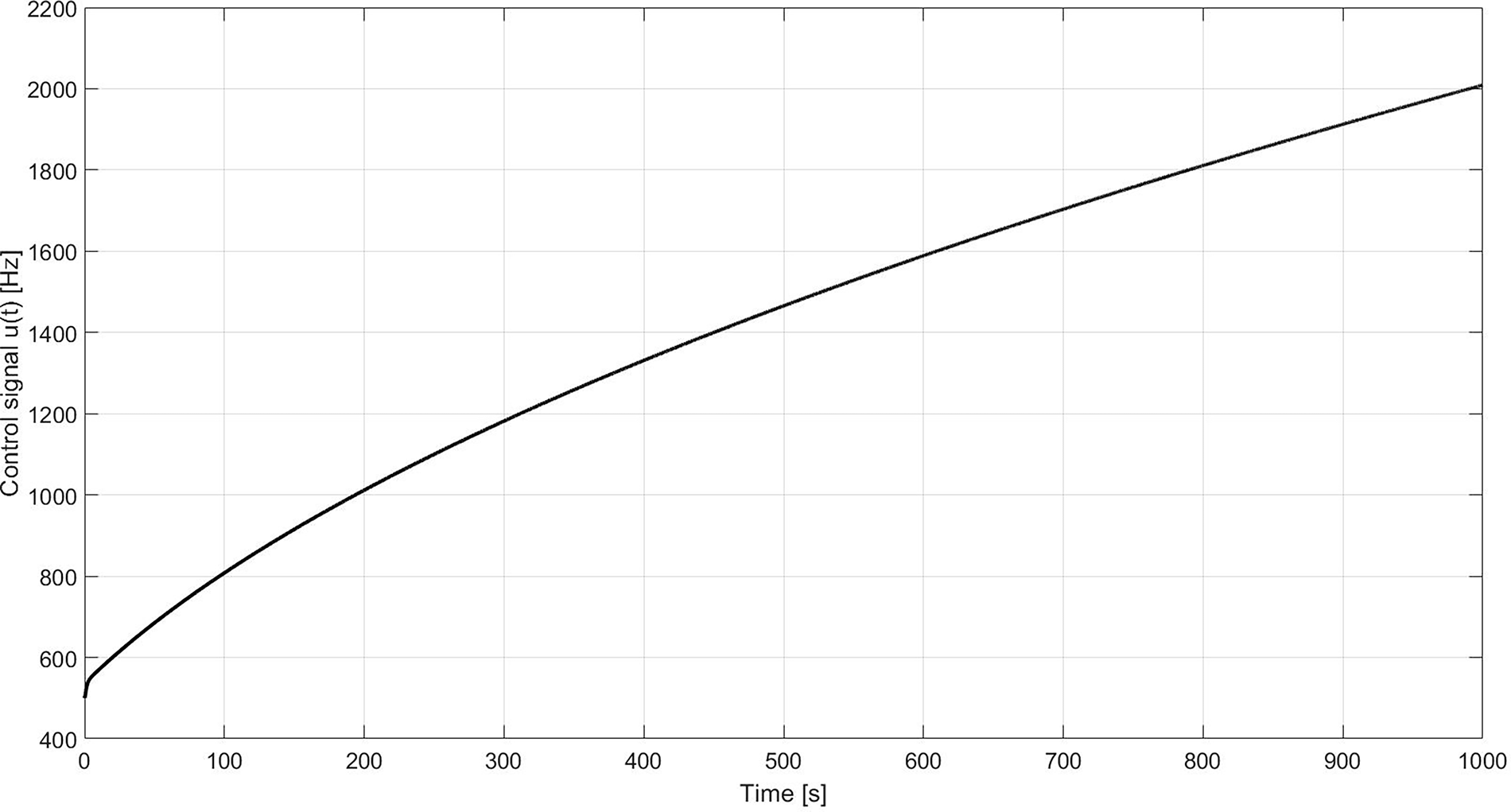
Figure 14: Frequency applied to the compressor by the PID controller.
• The initial rise corresponds to the quick response of the PID controller to correct the initial error between
• Once the temperature
• Although the control signal continues to increase slightly, the output temperature stabilizes correctly at the reference point, indicating that the system is in equilibrium and that the PID controller is fulfilling its function.
• This behavior is normal in PID-controlled systems with nonlinear relationships between the manipulated and controlled variables, and does not represent a problem as long as
In summary, the figure shows that the PID manages to stabilize the temperature while continuously adjusting the control signal to maintain the energy balance of the evaporator.
5 Discussion of Results and Comparison of Control Strategies
The comparison between the classic PID control (tuned using Simulink’s Auto Tune option) and the Wavenet-based adaptive PID with an IIR filter allows you to identify key differences in terms of stability, response speed, robustness, and energy efficiency.
The classic PID controller achieves a stable response with a settling time of approximately 13 s and an overshoot of less than 4%. This behavior is characteristic of a first-order thermal system dominated by the thermal inertia of the evaporator. However, its fixed gains limit its responsiveness to variations in thermal load or changes in environmental conditions.
Instead, PID-Wavenet dynamically adjusts the gains
The IIR filter coupled to the Wavenet network smooths out rapid variations in adaptive gains, preventing numerical oscillations in the control signal
5.3 Energy Consumption and Control Signal
The classic PID controller tends to progressively increase the compressor frequency (
5.4 Quantitative Comparison of Performance
Table 5 summarizes the main performance indicators obtained from the numerical simulations for both control strategies, including quantitative criteria used to support the qualitative descriptors shown in the stability, robustness, and adaptability indicators. For stability in the face of disturbances, a controller is classified as High when the peak deviation of
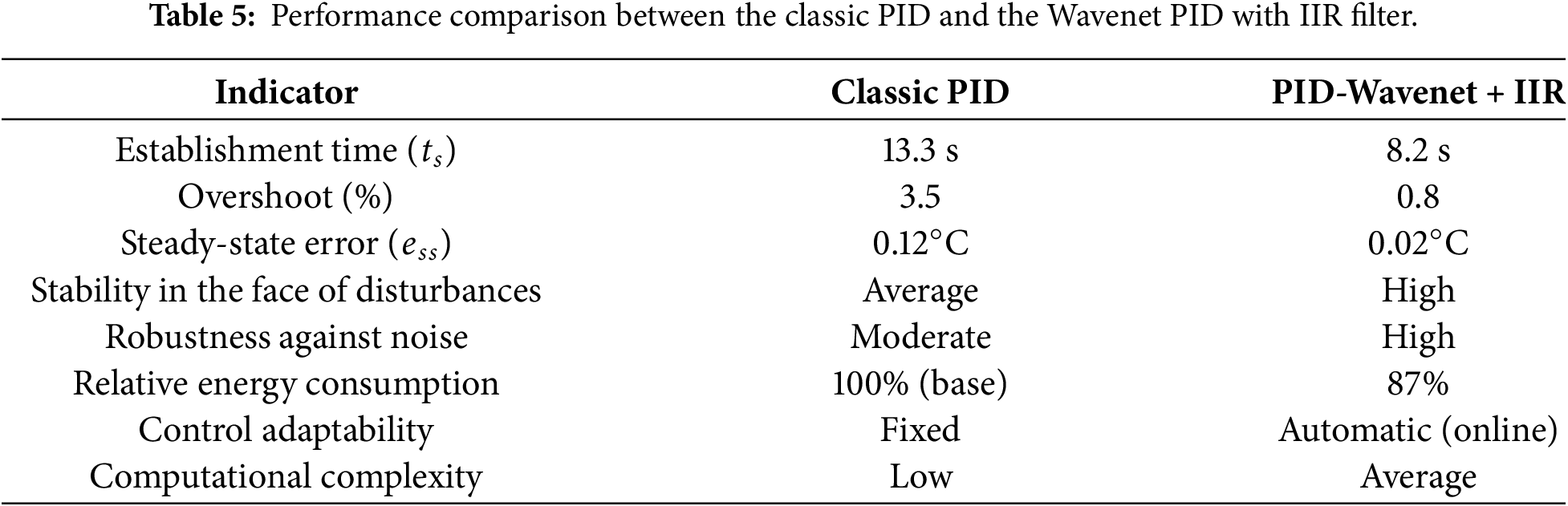
A quantitative comparison of the two control strategies highlights the significant improvements achieved by the proposed PID-Wavenet with IIR filtering. Specifically, the adaptive approach reduces the settle time from 13.3 to 8.2 s, representing a 38% improvement in response speed. The overshoot decreases from 3.5% to 0.8%, corresponding to a reduction of 77%, while the steady-state error is minimized from
The quantitative findings discussed above are interpreted in the context of practical benefits and trade-offs supported by the quantitative criteria discussed above in terms of practical benefits and trade-offs, as presented in the following subsection.
5.5 Advantages and Disadvantages of Each Approach
• Classic PID:
– Advantages: Simplicity of implementation, low computational cost, and predictable response under steady-state conditions.
– Disadvantages: Lack of adaptation, less robustness to disturbances, and increased energy consumption in variable scenarios.
• PID-Wavenet with IIR filter:
– Advantages: Real-time adaptive learning, greater robustness, minimal oscillation, lower steady-state error, and reduced energy consumption.
– Disadvantages: greater complexity of the implementation and the need to adjust learning rates (
Overall, the results show that the PID-Wavenet with the IIR filter offers superior performance in accuracy, stability, and energy efficiency.
Although classic PID is suitable for steady-state conditions, the wavelet network-based approach demonstrates a better ability to adapt to variable evaporator conditions, maintaining
Consequently, PID-Wavenet control is considered the most robust and efficient strategy for nonlinear thermal systems, validating the experimental and numerical results reported in [11,25,26].
5.7 Practical Implications and Future Applications
It is acknowledged that the primary limitation of this work is the absence of experimental validation on a physical test bench. Real-world refrigeration systems are subject to unmodeled dynamics, such as sensor noise, actuator delays, and spatial gradients not fully captured by lumped-parameter models. However, the simulation results presented explicitly address these expected physical constraints through the design of the control architecture itself. Specifically, the integration of the IIR filter is a proactive measure designed to mitigate the measurement noise inherent in real sensors, which often destabilizes adaptive gains. Therefore, the numerical validation provided here constitutes a necessary and rigorous first phase, justifying the subsequent implementation of the PID-Wavenet in a Hardware-in-the-Loop (HIL) or experimental prototype scenario as the immediate next step in this research line.
The model and the results obtained allow us to visualize practical applications of PID-Wavenet control in small- and medium-scale thermal and refrigeration systems. The controller’s ability to adjust its gains in real time makes it especially suitable for scenarios where thermal conditions are variable or uncertain, as occurs in:
• Intelligent refrigeration systems with variable frequency drive (VFD) compressor control.
• Liquid chillers used in laboratories or data centers.
• Compact HVAC systems and cold storage rooms with rapid temperature fluctuations.
• Experimental heat transfer test benches with automated thermal control.
From an applied engineering perspective, the incorporation of the IIR filter within the adaptive scheme improves control stability and reduces the computational effort of the Wavenet network, making its implementation viable in low-cost embedded controllers or real-time digital control systems (DSP or industrial microcontrollers).
In the future, this model can be extended to:
• Thermal management systems in unmanned aircraft (UAVs) or satellites, where heat dissipation depends on changing environmental conditions.
• Adaptive thermal control in hybrid air-liquid systems or in cooling modules for aeronautical power electronics.
• Integration with predictive algorithms based on deep neural networks or hybrid fuzzy-adaptive control models to optimize overall energy efficiency.
In conclusion, the results obtained validate the viability of PID-Wavenet control with an IIR filter as an innovative alternative to advanced thermal control, offering a balance between precision, robustness, and computational efficiency, with broad applications possibilities in thermal engineering, mechatronics, and aerospace.
Acknowledgement: We would like to express our sincere gratitude to Universidad Politécnica Metropolitana de Hidalgo for its support in equipment and financing the publication costs.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: The authors confirm contribution to the paper as follows: Conceptualization, M. A. Vega Navarrete; methodology, L. E. Marron Ramirez, E. A. Islas Narvaez; software, M. A. Vega Navarrete; formal analysis, L. E. Marron Ramirez; investigation, C. M. Rodriguez Roman, P. J. Argumedo Teuffer; writing—original draft preparation, M. A. Vega Navarrete, C. M. Rodriguez Roman; writing—review and editing, C. M. Rodriguez Roman, P. J. Argumedo Teuffer. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: The datasets generated and analyzed during the current study are available from the corresponding author, upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Gruhle WD, Isermann R. Modeling and control of a refrigerant evaporator. J Dyn Syst Meas Control. 1985;107(4):235–40. doi:10.1115/1.3140728. [Google Scholar] [CrossRef]
2. Saxon A, Yang C, Santhanagopalan S, Keyser M, Colclasure A. Li-ion battery thermal characterization for thermal management design. Batteries. 2024;10(4):136. doi:10.3390/batteries10040136. [Google Scholar] [CrossRef]
3. Young BR. Modelling and identification of a climbing film evaporator [dissertation]. Christchurch, New Zealand: University of Canterbury; 1992. [Google Scholar]
4. Mansour MK, Hassab MA. Novel lumped modeling for determining thermal performance of DX evaporator under partially-wet and fully-wet conditions. Appl Therm Eng. 2016;98:1025–35. doi:10.1016/j.applthermaleng.2015.12.094. [Google Scholar] [CrossRef]
5. Kim D, Lee J, Do S, Mago PJ, Lee KH, Cho H. Energy modeling and model predictive control for HVAC in buildings: a review of current research trends. Energies. 2022;15(19):7231. doi:10.3390/en15197231. [Google Scholar] [CrossRef]
6. Kam KM, Tadé MO. Simulated nonlinear control studies of five-effect evaporator models. Comput Chem Eng. 2000;23(11–12):1795–1810. doi:10.1016/s0098-1354(00)00291-x. [Google Scholar] [CrossRef]
7. To LC, Tadé MO, Kraetzl M, Le Page GP. Nonlinear control of a simulated industrial evaporation process. J Process Control. 1995;5(3):173–82. doi:10.1016/0959-1524(94)00001-s. [Google Scholar] [CrossRef]
8. Canela-Sanchez IJ, Juarez-Romero D, Escobar-Jimenez RF. Modeling and simulation of a helical falling film evaporator to improve its performance and design. Appl Ther Eng. 2023;228:120445. doi:10.1016/j.applthermaleng.2023.120445. [Google Scholar] [CrossRef]
9. Bojnourd FM, Fanaei MA, Zohreie H. Mathematical modelling and dynamic simulation of multi-effect falling-film evaporator for milk powder production. Math Comput Model Dyn Syst. 2015;21(4):336–58. doi:10.1080/13873954.2014.980276. [Google Scholar] [CrossRef]
10. Smith PD. Control and optimization of a multiple-effect evaporator. 2000 [cited 2025 Nov 12]. Available from: https://open.uct.ac.za/items/59a5b506-a2df-40ff-9d3e-48ed8d47a95d. [Google Scholar]
11. Vega S, Bravo M, Camacho O. A dual-adaptive PID control approach for nonlinear processes with variable parameters. In: Proceedings of the 2024 IEEE Biennial Congress of Argentina (ARGENCON); 2024 Sep 18–20; San Nicolás de los Arroyos, Argentina. p. 1–6. doi:10.1109/ARGENCON62399.2024.10735929. [Google Scholar] [CrossRef]
12. Wang K, Zhang X, Bai L. Wavelet neural network control system based on fuzzy PID. Academic J Comput Inf Sci. 2021;2021(3):18–24. doi:10.25236/ajcis.2021.040303. [Google Scholar] [CrossRef]
13. Jahedi G, Ardehali MM. Wavelet based artificial neural network applied for energy efficiency enhancement of decoupled HVAC system. Energy Convers Manag. 2012;54(1):47–56. doi:10.1016/j.enconman.2011.10.005. [Google Scholar] [CrossRef]
14. Khan MAS, Rahman MA. A novel neuro-wavelet-based self-tuned wavelet controller for IPM motor drives. IEEE Trans Ind Appl. 2010;46(3):1194–1203. doi:10.1109/tia.2010.2045213. [Google Scholar] [CrossRef]
15. Kanungo A, Choubey C, Gupta V, Kumar P, Kumar N. Design of an intelligent wavelet-based fuzzy adaptive PID control for brushless motor. Multimed Tools Appl. 2023;82(21):33203–23. doi:10.1007/s11042-023-14872-6. [Google Scholar] [CrossRef]
16. Liu Z, Gao H, Yu X, Lin W, Qiu J, Rodriguez-Andina JJ, et al. B-spline wavelet neural-network-based adaptive control for linear-motor-driven systems via a novel gradient descent algorithm. IEEE Trans Ind Electron. 2024;71:1896–905. doi:10.1109/TIE.2023.3260318. [Google Scholar] [CrossRef]
17. Castro J, Farnós J, Papakokkinos G, Zheng J, Oliet C. Transient model for the development of an air-cooled LiBr-H2O absorption chiller based on heat and mass transfer empirical correlations. Int J Refrig. 2020;120:406–19. doi:10.1016/j.ijrefrig.2020.08.030. [Google Scholar] [CrossRef]
18. Camacho EF, Gallego AJ, Escaño JM, Sánchez AJ. Hybrid nonlinear MPC of a solar cooling plant. Energies. 2019;12(14):2723. doi:10.3390/en12142723. [Google Scholar] [CrossRef]
19. Saleh B, Aly AA, Alsehli M, Elfasakhany A, Bassuoni MM. Performance analysis and working fluid selection for single and two stages vapor compression refrigeration cycles. Processes. 2020;8(9):1017. doi:10.3390/pr8091017. [Google Scholar] [CrossRef]
20. Bergman TL, Lavine AS, Incropera FP, De Witt DP. Fundamentals of heat and mass transfer. 8th ed. Hoboken, NJ, USA: Wiley; 2018. p. 992. [Google Scholar]
21. Kakaç S, Yüncü H. Heat exchangers: selection, rating, and thermal design. 2nd ed. Boca Raton, FL, USA: CRC Press; 2002. 520 p. [Google Scholar]
22. Dossat RJ, Horan TJ. Principles of refrigeration. 5th ed. Upper Saddle River, NJ, USA: Prentice Hall; 2002. 454 p. [Google Scholar]
23. ASHRAE. ASHRAE handbook: HVAC systems and equipment. Atlanta, GA, USA: American Society of Heating, Refrigerating and Air-Conditioning Engineers; 2016. [Google Scholar]
24. Stoecker WF, Jones JW. Refrigeration and air conditioning. 2nd ed. New York, NY, USA: McGraw-Hill; 1982. [Google Scholar]
25. Ramos-Velasco LE, Parra-Vega V, García Rodríguez R, Vega Navarrete MA. Knowledge-based self-tuning of PID control gains for continuum soft robots. Eng Appl Artif Intell. 2024;133(7):108447. doi:10.1016/j.engappai.2024.108447. [Google Scholar] [CrossRef]
26. Garcia-Castro OF, Ramos-Velasco LE, Garcia-Rodriguez R, Vega-Navarrete MA, Escamilla-Hernández E, Oliva-Moreno LN. Estudio comparativo de controladores PID WaveNet-IIR aplicado a un helicóptero de 2 GDL. Pädi Boletín Científico De Ciencias Básicas E Ingenierías Del ICBI. 2022;10:36–42. doi:10.29057/icbi.v10iEspecial5.10067. [Google Scholar] [CrossRef]
27. Proakis JG, Manolakis DG. Digital signal processing: principles, algorithms, and applications. 5th ed. Upper Saddle River, NJ, USA: Pearson; 2021. 1146 p. [Google Scholar]
28. Ogata K. Discrete-time control systems. 2nd ed. Upper Saddle River, NJ, USA: Prentice Hall; 1995. 776 p. [Google Scholar]
29. Domínguez CR, Espejel Rivera MA, Ramos Velasco LE, Ramos Fernández JC, Escamilla Hernández E. Wavelet neural network algorithms with applications in approximation signals. In: Batyrshin I, Sidorov G, editors. Advances in soft computing. Berlin/Heidelberg, Germany: Springer; 2011. p. 374–85. doi:10.1007/978-3-642-25330-0_33. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools