
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Pre-Impact and Impact Fall Detection Based on a Multimodal Sensor Using a Deep Residual Network
1 Image Information and Intelligence Laboratory, Department of Computer Engineering, Faculty of Engineering, Mahidol University, Nakhon Pathom, 73170, Thailand
2 Department of Computer Engineering, School of Information and Communication Technology, University of Phayao, Phayao, Thailand
3 Department of Mathematics, Faculty of Applied Science, King Mongkut’s University of Technology North Bangkok, Bangkok 10800, Thailand
4 Intelligent and Nonlinear Dynamic Innovations Research Center, Science and Technology Research Institute King Mongkut’s University of Technology North Bangkok, Bangkok 10800, Thailand
* Corresponding Author: Anuchit Jitpattanakul. Email:
Intelligent Automation & Soft Computing 2023, 36(3), 3371-3385. https://doi.org/10.32604/iasc.2023.036551
Received 04 October 2022; Accepted 23 November 2022; Issue published 15 March 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Falls are the contributing factor to both fatal and nonfatal injuries in the elderly. Therefore, pre-impact fall detection, which identifies a fall before the body collides with the floor, would be essential. Recently, researchers have turned their attention from post-impact fall detection to pre-impact fall detection. Pre-impact fall detection solutions typically use either a threshold-based or machine learning-based approach, although the threshold value would be difficult to accurately determine in threshold-based methods. Moreover, while additional features could sometimes assist in categorizing falls and non-falls more precisely, the estimated determination of the significant features would be too time-intensive, thus using a significant portion of the algorithm’s operating time. In this work, we developed a deep residual network with aggregation transformation called FDSNeXt for a pre-impact fall detection approach employing wearable inertial sensors. The proposed network was introduced to address the limitations of feature extraction, threshold definition, and algorithm complexity. After training on a large-scale motion dataset, the KFall dataset, and straightforward evaluation with standard metrics, the proposed approach identified pre-impact and impact falls with high accuracy of 91.87 and 92.52%, respectively. In addition, we have investigated fall detection’s performances of three state-of-the-art deep learning models such as a convolutional neural network (CNN), a long short-term memory neural network (LSTM), and a hybrid model (CNN-LSTM). The experimental results showed that the proposed FDSNeXt model outperformed these deep learning models (CNN, LSTM, and CNN-LSTM) with significant improvements.Keywords
Due to the increasing aging of the world’s population, the welfare and safety of the elderly are a concern. Moreover, 28%–35% of people aged 65 years or older fall at least once a year, and 20%–30% of falls result in moderate to severe injury or even death [1]. Much research has also been conducted to develop fall detection systems (FDSs) to reduce the severity of fall-related injuries.
Based on the sensors used, FDSs can be divided into contextual and wearable systems [2,3]. Furthermore, context-aware systems rely heavily on environmental sensors such as radar and floor sensors, in addition to vision-based instruments, as primary data collection sources. The inability to detect falls anywhere at any time would be a critical shortcoming of such systems, which would be limited to indoor applications. In the last decade, wearable sensor-based fall detection systems have gained wide appeal among researchers due to their mobility, accurate motion detection, and low cost [4]. Moreover, research has mainly focused on wearable inertial sensors. There have been two general approaches for developing sensor-based fall detection systems for wearable devices. Additionally, most current research has focused on post-fall detection, which has aimed to efficiently detect fall events and trigger medical alerts to limit the frequency and severity of prolonged falls [5]. Nonetheless, this strategy has inherent drawbacks. It could not prevent fall-related injuries because the effects of the fall had already occurred. Another area of research was pre-impact fall detection, which has attempted to monitor a fall during the fall process before the body contacts with the floor. As a result, fall prevention measures such as wearing airbags could be triggered to prevent injuries from the impact of a fall [6]. This strategy would provide older people with a more fundamental approach to fall injury prevention. Unfortunately, this would be more complicated than post-fall detection because of the algorithms of the body-to-floor contact moment sensor signal, which would contain the most detailed data.
In recent years, numerous studies have been conducted to clarify this challenge by shifting the focus from post-impact fall detection to pre-impact falls. Most relevant work on pre-impact FDS has been done using threshold-based and machine learning (ML) techniques. However, determining the correct threshold has not been straightforward. Although additional features could help to categorize falls and non-falls more accurately, computing the values of the salient features would be too time-consuming and waste too much operating time of the ML algorithm. With the development of deep learning (DL) techniques, a few early experiments have demonstrated the effectiveness of the generated algorithms on moderately small datasets (limited number of human participants and movements).
Therefore, this study investigated the use of pre-impact FDS utilizing wearable sensors and DL techniques. To accomplish our study objective, we proposed a deep residual network for pre-impact FDS that would effectively detect pre-impact falls. The proposed model was trained and evaluated using KFall, a large-scale movement dataset. The following is a summary of our contributions:
• FDSNeXt, a novel deep residual network with aggregated transformation, was proposed in this study, which included many multikernel blocks throughout the main convolution procedure to provide reliable predictions for pre-impact and impact fall detection.
• Different DL networks (CNN, LSTM, and CNN-LSTM) were implemented to analyze and detect the pre-impact and impact fall events.
• On the same pre-impact fall dataset, we compared the performance of the proposed FDSNeXt.
The following specifics highlight the paper’s organization: The related study is discussed in Section 2. Section 3 explains the approach, which consists of a sensor-based FDS structure and a proposed DL model. Then, in Section 4, the experiments and results of the DL model are analyzed and compared. The research results are discussed in Section 5. In Section 6, we conclude with a description of our results, limitations, and potential research challenges.
In this section, we briefly discuss the studies on sensor-based fall detection. The following sections contain further information on the related studies in this study.
2.1 Sensor-Based Fall Detection
Vision-based, ambient, and wearable sensors are three possible classifications for current fall detection strategies [7]. Vision-based sensors collect movement data by tracking tools and determining a participant’s body image tilt or particular skeletal inscriptions from video or image data [8] to notice a fall. In most cases, ambient sensors detect falls by gathering infrared [9], radar [10], and other data from the surrounding sensor. Although it poses no privacy concerns, this has a slightly higher cost. Moreover, this is susceptible to noise and has a somewhat restricted detection range. Several low-cost sensors have also been used by wearable technology to monitor falls [11]. Their detecting capabilities have depended on the sensor being worn in real-time. However, the elderly could not do this in some situations, such as bathing. In addition, some elderly people could feel pain through their clothing.
There are post-fall and pre-impact fall detection systems based on wearable inertial sensors. Post-fall detection would perceive falls and alert caregivers to avoid prolonged recumbency [12]. As the name implies, a fall could not be detected until after it occurred, so injuries due to fall impact could not be prevented. Hence, pre-impact fall detection would attempt to detect a fall before the body reached the floor (pre-impact), so that a protective device could be triggered to prevent any harm [13]. Since only partial fall data has been available, the development of pre-impact fall detection algorithms would be more difficult but could address the problem more fundamentally.
Due to the cheap affordability of sensors in latest years, wearable sensors have gained increasing popularity. To achieve the three-axis acceleration at various points and the three-axis rotation angular velocity in a gyroscope, the most popular locations for wearable sensors have been the calf, spine, head, pelvis, and feet [14].
2.2 DL Approaches in Fall Detection
Conventional pattern classification and recognition based on DL are the two primary categories of ML techniques [15]. Standard recognition techniques (such as the support vector machines (SVM) technique [16] and the k-nearest neighbor (KNN) technique [17]) would depend on manually extracted features for identification. Therefore, researchers have proposed stricter parameters for fall detection. First, it would be crucial to identify the physical components involved in the falling operation. Second, it would be necessary to analyze how these traits would be differentiated from the activities of daily living (ADLs) such as sitting and leaping; otherwise, the feature extraction process would greatly slow down. Classification and recognition based on DL would be used in fall detection systems that could automatically identify feature data. Because of this advantage, DL approaches have gained popularity in the scientific community. They have been used in various fields where they have played an equivalent role to human specialists. In general, the stages required in DL approaches that use sensor data from wearable devices are preprocessing the received signals, extracting features from the signal parts, and training a model using these aspects as input data [18]. The current study on fall risk assessment using sensor data from wearable devices mainly focused on engineering optimization. Various DL techniques were provided with the obtained features to predict the occurrence of falls. In addition, Klenk et al. [19] developed a fall detection approach based on LSTM, which used a longstanding array as input and extracted temporal information correctly.
In this section, the procedure for developing a DL model and detecting falls using wearable sensing devices is explained. Fig. 1 shows the proposed approach for fall detection. This consists of four stages: (1) data acquisition, (2) data pre-processing, (3) data generation, and (4) model training and classification. In the following sections, each stage is described in detail.
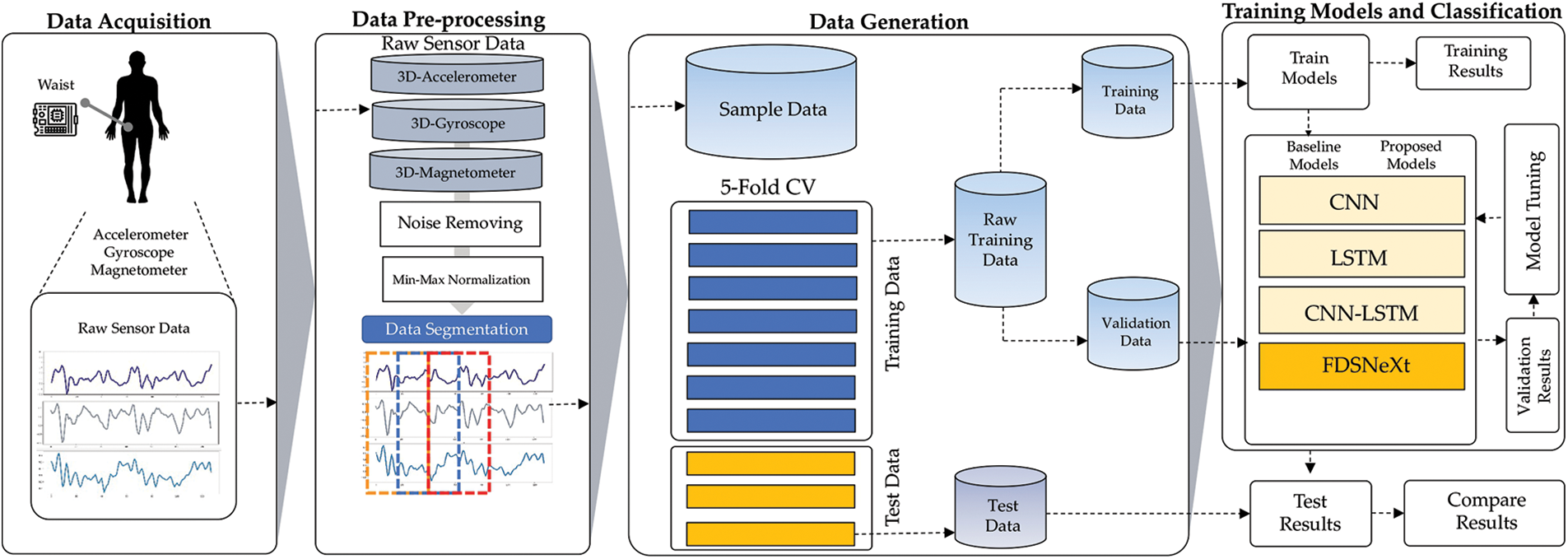
Figure 1: The proposed FDSNeXt methodology
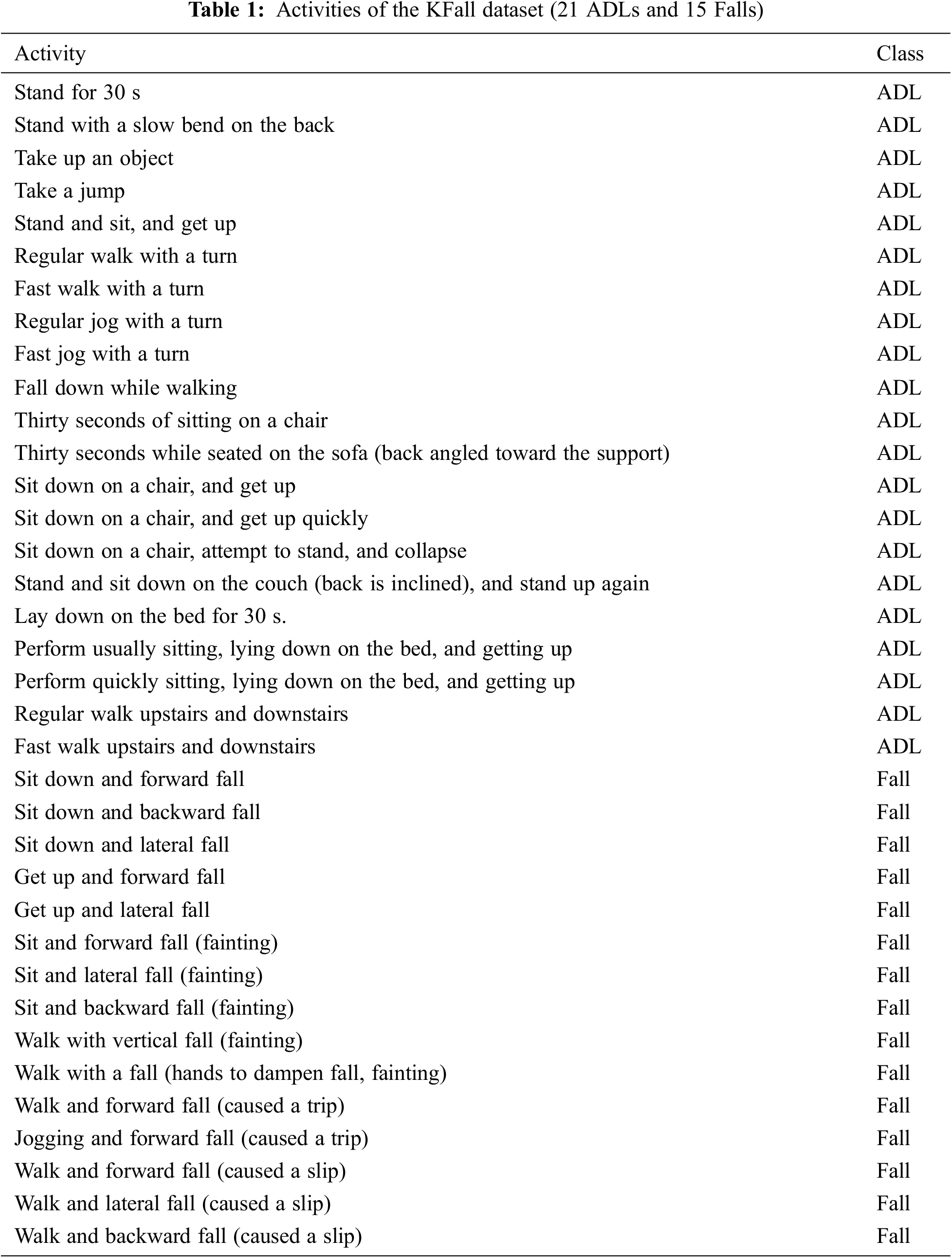
The KFall [20] was a public dataset for fall detection. The data mainly included inertial sensor data collected at waist level. According to Table 1, 32 teenage male participants performed 21 ADLs and 15 falls in this study. A total of 5075 ADL/fall events were recorded. For the data collection of mobility, a nine-axis inertial sensor was used to collect the mobility data, which consisted of a triaxial accelerometer with ±16G, a gyroscope with ±2,000°/s, and a magnetometer with ±16G. The orientation measurement given by the supplier was the combination of the angular velocity, which was adjusted by merging the accelerometer and magnetometer data using an extensive Kalman filter. The sensor was set at a 100 Hz frequency. The sensor data was transferred through a Bluetooth dongle connected to the Raspberry Pi host.
The raw sensor data from the waist contained the measurement noise and additional unpredicted noise resulting from the active movements of the participants during the data acquisition. A noisy signal obliterated the relevant information. Therefore, it was important to limit the impact of the noise on the mobility in order to collect the user’s data for subsequent processing. Mean, low-pass, and wavelet filtering were the most common filtering methods [21,22]. We used a third order low-pass Butterworth filter with a 20 Hz cutoff frequency to the accelerometer, gyroscope, and Euler angles sensors in all orientations to denoise the data as shown in the Fig. 2. Furthermore, 99.9% of the energy was retained below 15 Hz [23]; therefore, this value was sufficient for the physical motion detection. As illustrated in Fig. 3, the preprocessed sensor data were separated by a sliding window with a fixed width of 0.5 s and an overlap of 50%.
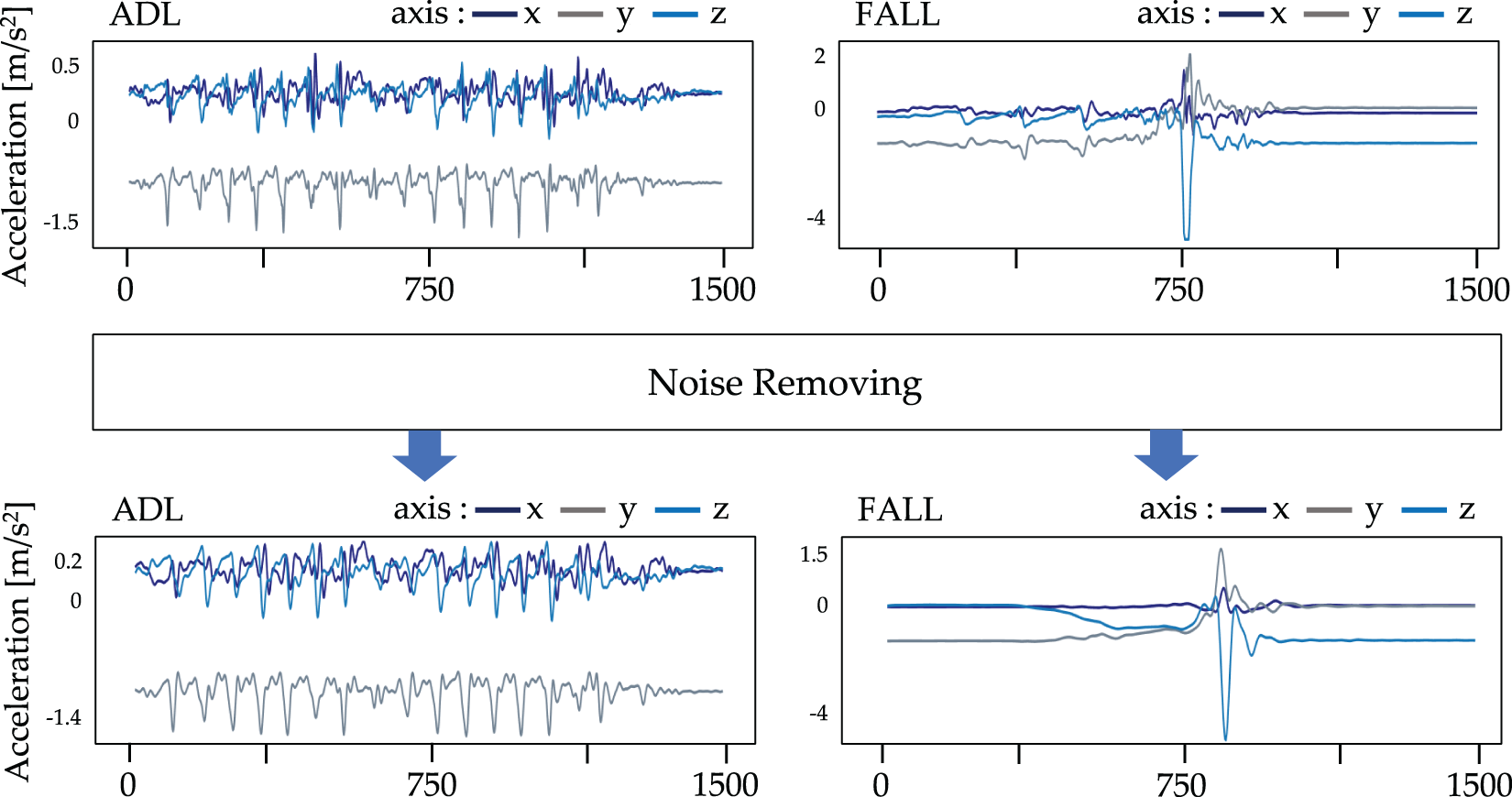
Figure 2: Some samples of acceleration before and after noise removing
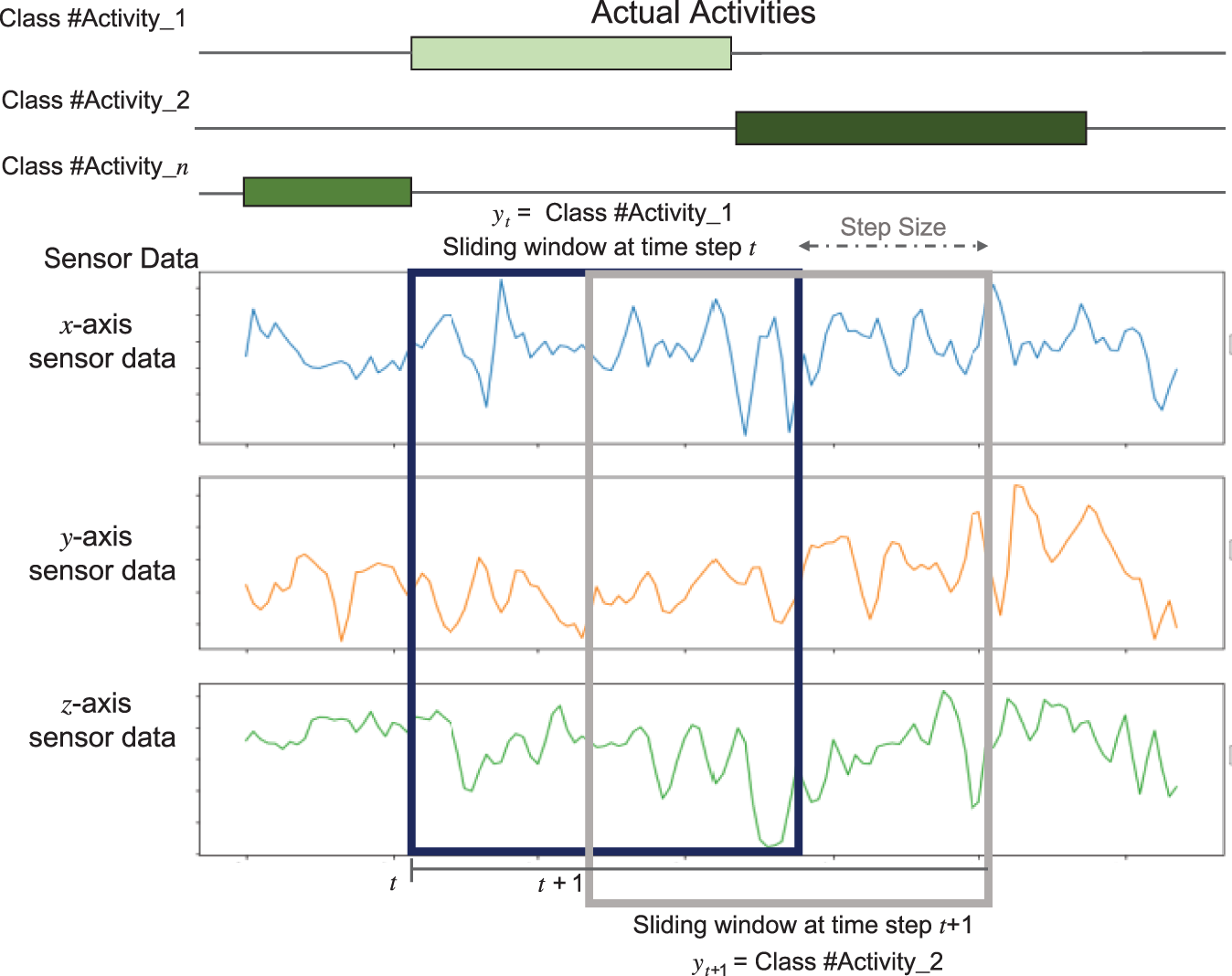
Figure 3: Fixed length sliding window approach
There were three reasons about the selection of the window size of 0.5 s and the overlapping proportion of 50% as follows: (1) the 0.5 s window size in the sliding windows were sufficient to achieve the high detection rates for the fall detection problems as suggested by Liu et al. [24]. (2) Since the focus of this study was pre-impact fall detection, the window size was suggested for the fall injury prevention based on the practicality measures [15]. The sliding window approach was the most widely employed segmentation technique in fall detection research. Its implementational simplicity and lack of preprocessing determined that the windowing approach to be ideally suited to real-time applications [25]. The signals were split into windows of a fixed size and with no inter-window gaps. This work used a 50-sample window, as mentioned above, and a 50% displacement of the sample size, which corresponded to 25 temporal samples and applied this approach as a data augmentation technique: This inferred that there was an overlap of 50% of the information between the two consecutive temporal windows.
3.3 The Proposed Deep Residual Network
This study addressed a convolution-based DL technique to overcome the FDS challenge. We proposed a multi-branch aggregation model called FDSNeXt that was influenced by Xie et al. [26]. In this network, the various-sized kernel feature maps were appended, as opposed to concatenated as in InceptionNet [27]. This dramatically decreased the number of model parameters, thus making such interconnections appropriate for edge and low-latency applications. Fig. 4 shows the information on the FDSNeXt.
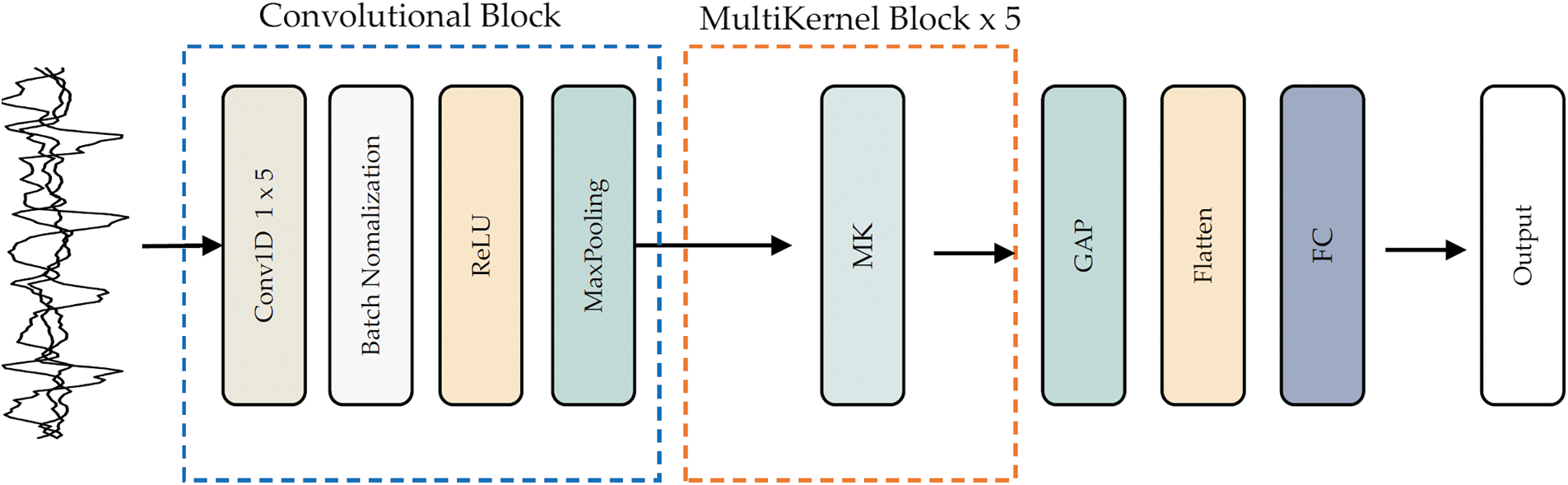
Figure 4: The proposed FDSNeXt model
The FDSNeXt model contained four units with convolutional kernels of differing sizes. Each multikernel unit had three kernel sizes: 1 × 3, 1 × 5, and 1 × 7. In addition, the 1 × 1 convolution was used before applying these kernels to decrease the model’s complication and the number of parameters. Fig. 5 shows the multikernel in its entirety.

Figure 5: Structure of the multikernel unit
In this work, the evaluation metrics of accuracy, precision, recall, and F1-score were used to evaluate the DL models and the proposed models for pre-impact and impact fall detection. These four evaluation metrics are most commonly used in fall detection research to evaluate the overall success. The detection is a true positive (TP) for the category under consideration and a true negative (TN) for all others. If sensor data from one category is incorrectly classified as belonging to another, this will result in a false positive (FP) detection. Sensor data from another category may be incorrectly classified as belonging to this category, resulting in a false negative (FP) detection.
Accuracy is the sum of correctly detected issues divided by the total number of classifications. The mathematical formula of the accuracy is shown in Eq. (1).
In the field of fall detection, the precision rate is the proportion of instances that represent a positive class out of all instances that are predicted to be positive classes. According to the definition, the mathematical formula for calculating the precision rate is presented in Eq. (2).
The recall rate is the proportion of the number of instances of all positive classes of which the number is correctly predicted to be positive. According to the definition, the recall metric is calculated mathematically as shown in Eq. (3).
The F1-score is the weighted summed average of the precision rate and the recall rate. The F1-score takes into account both the precision and recall metrics. When the F1-score is higher, this metric can indicate that the experimental method is effective. The F1-score formula is shown in Eq. (4).
4 Research Experiments and Results
4.1 Environmental Configuration
For this study, the Google Colab-Pro+ platform was deployed. The 16 GB graphics processor unit of Tesla V100-SXM2 was used to accelerate the training of the DL models with excellent performance. It was decided to include FDSNeXt and other standard DL models in the Python library using the Tensorflow backend v.3.9.1 [28] and the CUDA v.8.0.6 graphics cards. The following is a summary of the Python libraries that were the topic of these explorations:
• Numpy and Pandas were used to access, process, and analyze sensor data.
• Matplotlib and Seaborn were used to display and report the results of the data discovery and model evaluation.
• In the study, Sklearn was used to perform the sampling and data generation.
• Models for DL were created and trained using Keras, TensorFlow, and TensorBoard.
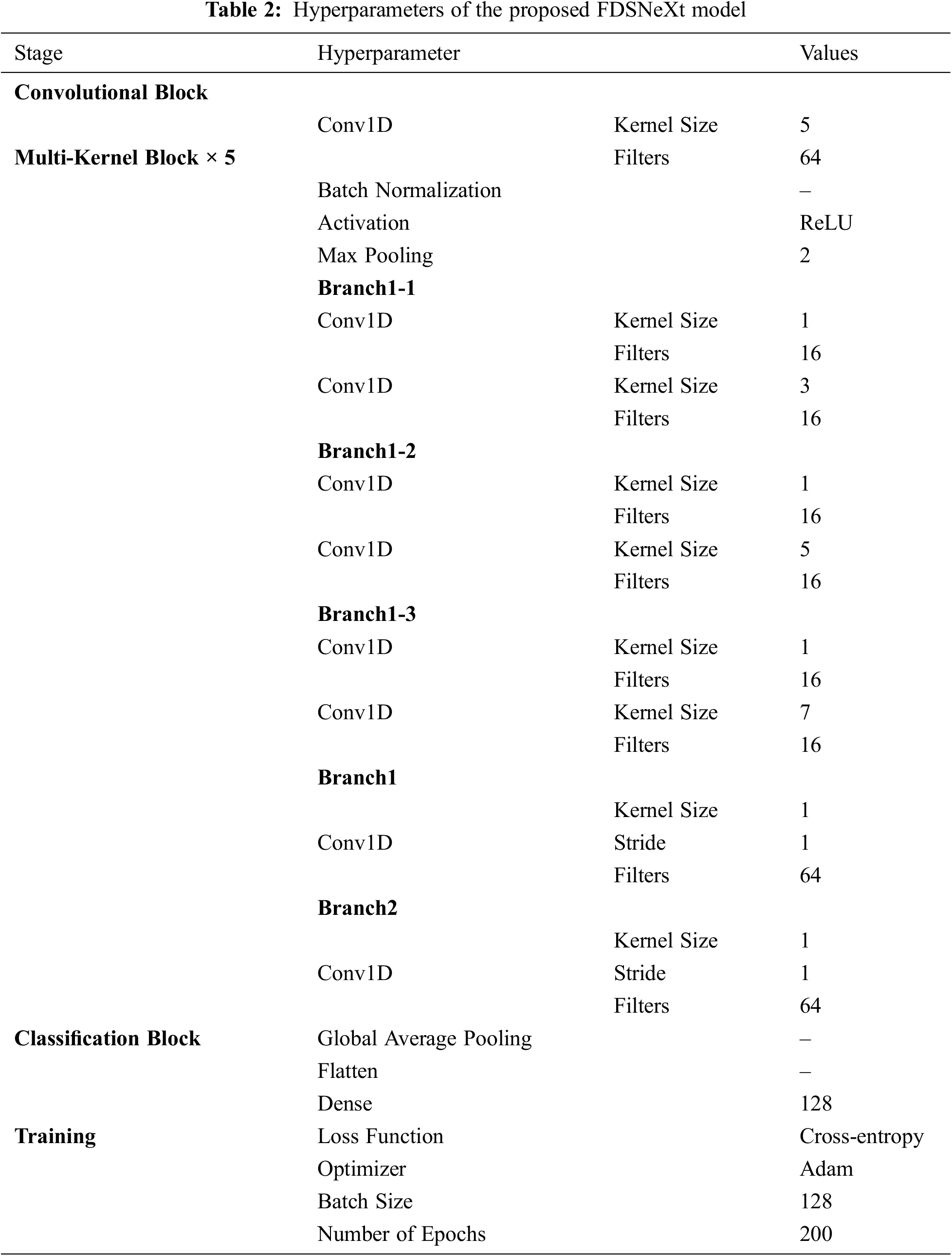
The hyperparameter settings in the DL model were used to drive the learning experience. For the proposed model, the relevant hyperparameters used were: (1) epochs, (2) batch size, (3) learning rate, (4) optimization, and (5) loss function (shown in Table 2). To create these hyperparameters, the number of epochs was set to 200, and the batch size was set to 128. If there was no improvement in the validation loss after 30 epochs, we used a call to stop early to terminate the training process. Initially, the learning rate was set to 0.001. Six epochs later, when the validation accuracy of the proposed model did not improve, we reduced the parameter to 75% of its initial value. To reduce the error, the Adam optimizer was used with the parameters β1 = 0.90, β2 = 0.999, and ε = 1 1010, respectively. The error was determined by the optimizer using the categorical cross-entropy function. The cross-entropy was superior to other methods, including classification and mean squared error.
In this research, the two main experiments were conducted utilizing sensor data from the KFall dataset:
• Scenario I: Detected falls using data from wearable sensors
• Scenario II: Utilized data from wearable sensors to identify falls before impact.
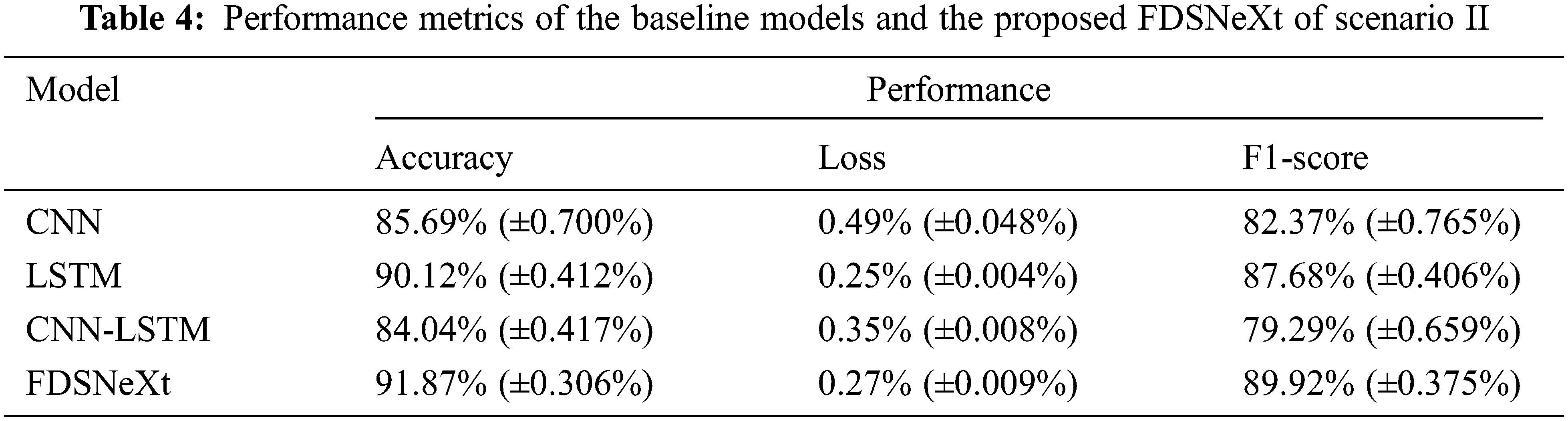
Considering a five-fold cross-validation procedure, experimental movement signal data were obtained. This study evaluated the identification effectiveness of three standard DL models (CNN, LSTM, and CNN-LSTM) and the proposed FDSNeXt model via a series of experiments. The experimental results were evaluated by the Accuracy, Loss, and F1-score, as shown in Tables 3 and 4.
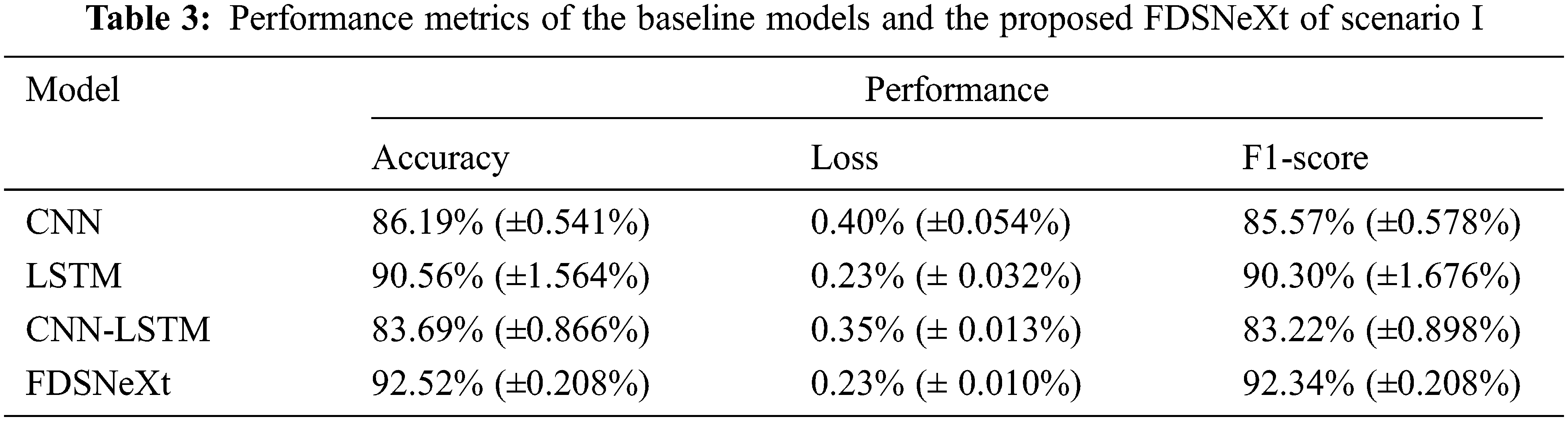
From the results of the fall detection, the proposed FDSNeXt model achieved the highest accuracy and F1-score in the experiment. The proposed model was achieved the best interpretations of the operating motion signals from the waist position with the highest accuracy of 92.52% and the highest F1-score of 92.34%.
The proposed FDSNeXt model achieved the highest accuracy and F1-score in the performed investigation for the pre-impact fall identification. Considering motion data from the waist location, the proposed model achieved the highest accuracy of 91.87% and the highest F1-score of 89.92%.
5.1 Comparison with Standard Models
To evaluate the effectiveness of the proposed FDSNeXt model, three standard DL models were evaluated as the benchmarks. In this work, the models were evaluated using five-fold cross-validation procedures, and the average performance indicators (Accuracy, Loss, and F1-score) were used as the indices to evaluate the effectiveness.
Several baseline models were used to evaluate the proposed model, including CNN, LSTM, and CNN-LSTM. Fig. 6 shows a comparative summary of the exploratory results.
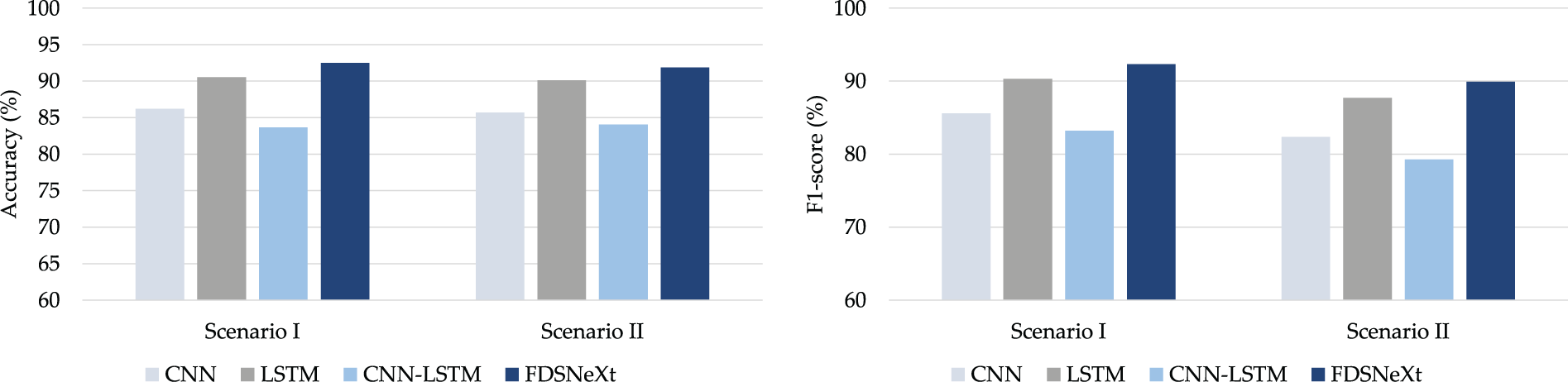
Figure 6: Comparative results of the models in different metrics: (a) Accuracy and (b) F1-score
As illustrated in Fig. 5, the comparative results showed that the proposed FDSNeXt model achieved encouraging results with more satisfactory interpretation than the baseline models.
5.2 The Results from Confusion Matrices
To show the efficiency of the proposed fall detection approach, we showed the confusion matrices of each DL model used in this work. Fig. 7 shows the confusion matrices of scenario I. The results showed that the proposed FDSNeXt model surpassed the three baseline DL models.
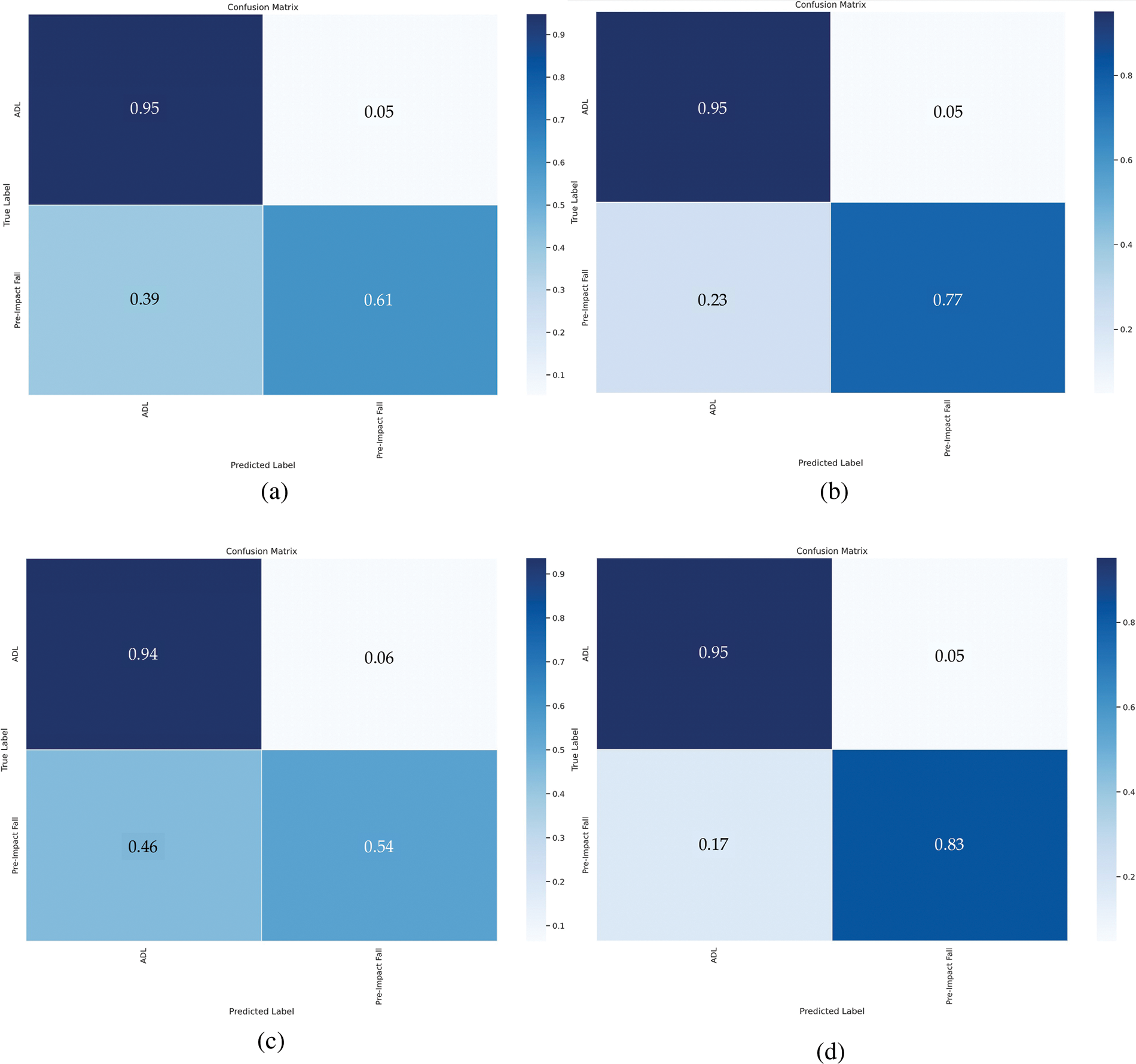
Figure 7: Confusion metrics of each model used in scenario I: (a) CNN, (b) LSTM, (c) CNN-LSTM and (d) FDSNeXt
Fig. 8 shows the confusion matrices of the models performed for the scenario II. The results showed that our proposed FDSNeXt outperformed the other standard DL models (CNN, LSTM, and CNN-LSTM).
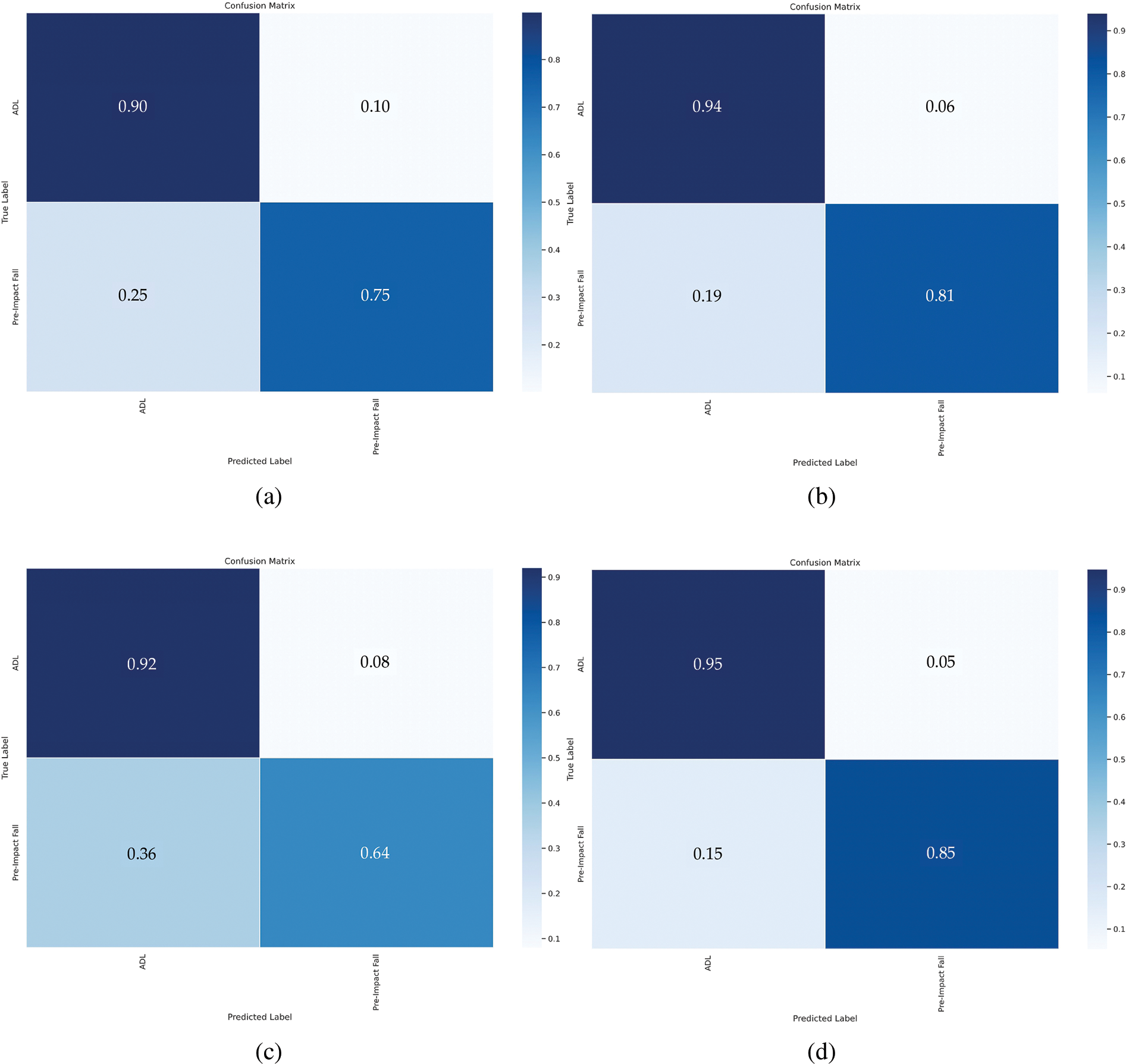
Figure 8: Confusion metrics of each model used in scenario II: (a) CNN, (b) LSTM, (c) CNN-LSTM and(d) FDSNeXt
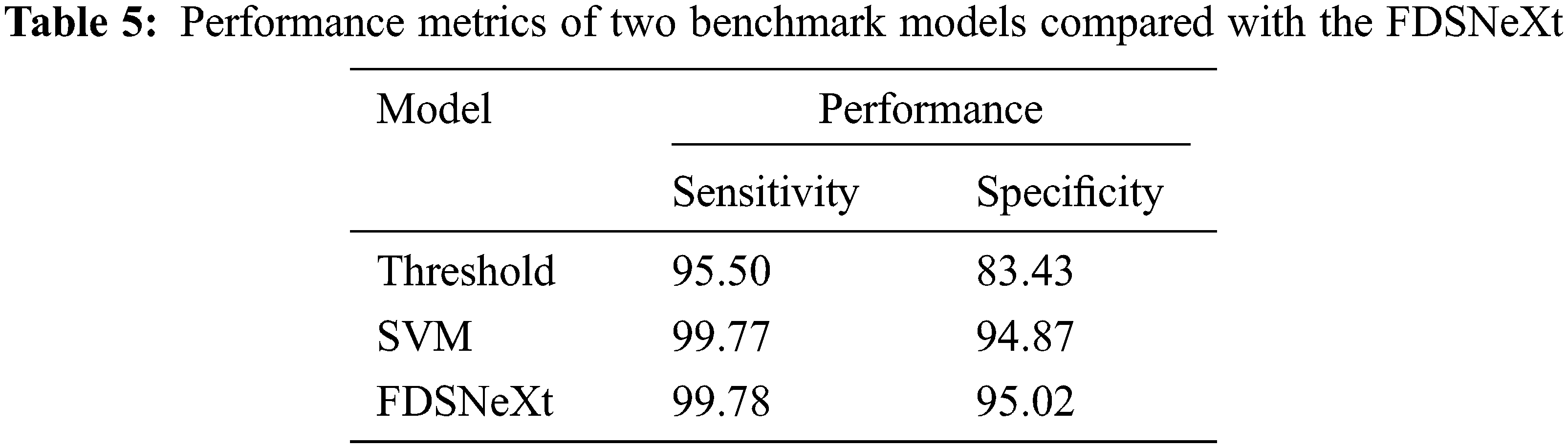
5.3 Comparison with Previous Works
The proposed FDSNeXt model was compared to previously trained models on the same dataset (KFall dataset). Previous research [20] has revealed that using a ML technique called the SVM model made it possible to reach a high-performance of the pre-impact fall detection using multimodal sensors. In the prior work, 80% of the data (26 subjects) were randomly chosen as a training set, and the remaining 20% of the data (six subjects) were treated for testing purposes. The sensitivity and specificity were calculated to evaluate the performance of the SVM and threshold-based algorithms. The comparison results indicated that the proposed FDSNeXt model achieved better accuracy than the previous model for pre-impact fall detection as shown in Table 5.
In this study, we investigated a DL model that depended on the inputs from wearable sensors compared to other models. According to the experimental results, the proposed FDSNeXt model significantly outperformed the other baseline models (CNN, LSTM, and CNN-LSTM). The proposed model was achieved the detection accuracies of 92.52 and 91.87% for fall detection and pre-impact fall detection, respectively.
The proposed DL network in this paper benefited from the repeated topology of the InceptionNet, which enabled it to have a very high accuracy rate while slightly increasing the amount of the network calculations, while also greatly reducing the number of hyperparameters. Moreover, the FDSNeXt network was based on the design concept of the residual connection and combined the aggregation transformation. The structure of the residual connection improved the shortcomings of the degradation for multi-layer DL networks. Moreover, the convolution modules of the transformation set were all the same. The FDSNeXt used a transformation set to replace the transformation structure of the Inception network. Because each aggregated topology was the same, the network no longer needed to modify too many hyperparameters on the different data sets, which had better robustness.
For future studies, we plan to collect elderly fall data and train the model to improve the detection accuracy. Moreover, the proposed model would be used on wearable devices such as smartphones and smartwatches.
Funding Statement: The authors gratefully acknowledge the financial support provided by Thammasat University Research fund under the TSRI, Contract No. TUFF19/2564 and TUFF24/2565, for the project of “AI Ready City Networking in RUN”, based on the RUN Digital Cluster collaboration scheme. This research project was also supported by the Thailand Science Research and Innovation Fund; the University of Phayao (Grant No. FF66-UoE001); King Mongkut’s University of Technology North Bangkok under Contract No. KMUTNB-66-KNOW-05.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. World Health Organization, WHO global report on falls prevention in older age. In: Nonserial Publication Series. Geneva, Switzerland: World Health Organization, 2008. [Online]. Available at: http://whqlibdoc.who.int/publications/2008/9789241563536_eng.pdf. [Google Scholar]
2. S. Mekruksavanich, P. Jantawong, A. Charoenphol and A. Jitpattanakul, “Fall detection from smart wearable sensors using deep convolutional neural network with Squeeze-and-Excitation module,” in 2021 25th Int. Computer Science and Engineering Conf. (ICSEC), Chiang Rai, Thailand, pp. 448–453, 2021. [Google Scholar]
3. S. Mekruksavanich and A. Jitpattanakul, “FallNeXt: A deep residual model based on multi-branch aggregation for sensor-based fall detection,” ECTI-CIT Transactions, vol. 16, no. 4, pp. 352–364, 2022. [Google Scholar]
4. D. Micucci, M. Mobilio and P. Napoletano, “Unimib shar: A dataset for human activity recognition using acceleration data from smartphones,” Applied Science, vol. 7, no. 10, pp. 1101, 2017. [Google Scholar]
5. O. Aziz, M. Musngi, E. J. Park, G. Mori and S. N. Robinovitch, “A comparison of accuracy of fall detection algorithms (threshold-based vs. machine learning) using waist-mounted tri-axial accelerometer signals from a comprehensive set of falls and non-fall trials,” Medical & Biological Engineering & Computing, vol. 55, no. 1, pp. 45–55, 2017. [Google Scholar]
6. X. Hu and X. Qu, “Pre-impact fall detection,” BioMedical Engineering OnLine, vol. 15, no. 61, pp. 1–16, 2016. [Google Scholar]
7. R. Tanwar, N. Nandal, M. Zamani and A. A. Manaf, “Pathway of trends and technologies in fall detection: A systematic review,” Healthcare (Basel), vol. 10, no. 1, pp. 172, 2022. [Google Scholar] [PubMed]
8. L. Yao, W. Yang and W. Huang, “A fall detection method based on a joint motion map using double convolutional neural networks,” Multimedia Tools and Applications, vol. 81, no. 4, pp. 4551–4568, 2022. [Google Scholar]
9. H. W. Tzeng, M. Y. Chen and J. Y. Chen, “Design of fall detection system with floor pressure and infrared image,” in 2010 Int. Conf. on System Science and Engineering, Taiwan, pp. 1–3, 2010. [Google Scholar]
10. H. Sadreazami, M. Bolic and S. Rajan, “Fall detection using standoff radar-based sensing and deep convolutional neural network,” IEEE Transactions on Circuits and Systems II: Express Briefs, vol. 67, no. 1, pp. 197–201, 2020. [Google Scholar]
11. T. Gao, J. Yang, K. Huang, Q. Hu and F. Zhao, “Research and implementation of two-layer fall detection algorithm,” in 2018 5th Int. Conf. on Systems and Informatics (ICSAI), China, pp. 10–12, 2018. [Google Scholar]
12. C. Wang, W. Lu, S. J. Redmond, M. C. Stevens, S. R. Lord et al., “A low-power fall detector balancing sensitivity and false alarm rate,” IEEE Journal of Biomedical and Health Informatics, vol. 22, no. 6, pp. 1929–1937, 2018. [Google Scholar] [PubMed]
13. X. Hu and X. Qu, “Pre-impact fall detection,” Biomedical Engineering Online, vol. 15, no. 61, pp. e37062, 2016. [Google Scholar]
14. A. Mannini, D. Trojaniello, A. Cereatti and A. M. Sabatini, “A machine learning framework for gait classification using inertial sensors: Application to elderly, post-stroke and Huntington’s disease patients,” Sensors, vol. 16, no. 1, pp. 134, 2016. [Google Scholar] [PubMed]
15. X. Yu, B. Koo, J. Jang, Y. Kim and S. Xiong, “A comprehensive comparison of accuracy and practicality of different types of algorithms for pre-impact fall detection using both young and old adults,” Measurement, vol. 201, no. 2016, pp. 111785, 2022. [Google Scholar]
16. P. Zappi, C. Lombriser, T. Stiefmeier, E. Farella, D. Roggen et al., “Activity recognition from on-body sensors: Accuracy-power trade-off by dynamic sensor selection,” in 5th European Conf. on Wireless Sensor Networks, Berlin/Heidelberg, Germany, pp. 17–33, 2008. [Google Scholar]
17. T. Shany, K. Wang, Y. Liu, N. H. Lovell and S. J. Redmond, “Review: Are we stumbling in our quest to find the best predictor? Over-optimism in sensor-based models for predicting falls in older adults,” Healthcare Technology Letters, vol. 2, no. 4, pp. 79–88, 2015. [Google Scholar] [PubMed]
18. M. Saleh, M. Abbas and R. B. Le Jeannès, “FallAllD: An open dataset of human falls and activities of daily living for classical and deep learning applications,” IEEE Sensors Journal, vol. 21, no. 2, pp. 1849–1858, 2021. [Google Scholar]
19. J. Klenk, L. Schwickert, L. Palmerini, S. Mellone, A. Bourke et al., “The FARSEEING real-world fall repository: A large-scale collaborative database to collect and share sensor signals from real-world falls,” European Review of Aging and Physical Activity, vol. 13, no. 8, pp. 658, 2016. [Google Scholar]
20. X. Yu, J. Jang and S. Xiong, “A large-scale open motion dataset (KFall) and benchmark algorithms for detecting pre-impact fall of the elderly using wearable inertial sensors,” Frontiers in Aging Neuroscience, vol. 13, pp. 692865, 2021. [Google Scholar] [PubMed]
21. L. Rong, Z. Jianzhong, L. Ming and H. Xiangfeng, “A wearable acceleration sensor system for gait recognition,” in 2007 2nd IEEE Conf. on Industrial Electronics and Applications, Harbin, China, pp. 2654–2659, 2007. [Google Scholar]
22. A. Mostayed, S. Kim, M. M. G. Mazumder and S. J. Park, “Footstep based person identification using histogram similarity and wavelet decomposition,” in 2008 Int. Conf. on Information Security and Assurance (isa 2008), Busan, Korea (Southpp. 307–311, 2008. [Google Scholar]
23. D. Anguita, A. Ghio, L. Oneto, X. Parra and J. L. Reyes-Ortiz, “A public domain dataset for human activity recognition using smartphones,” in European Symp. on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, pp. 437–442, 2013. [Google Scholar]
24. K. C. Liu, C. Y. Hsieh, H. Y. Huang, S. J. P. Hsu and C. T. Chan, “An analysis of segmentation approaches and window sizes in wearable-based critical fall detection systems with machine learning models,” IEEE Sensors Journal, vol. 20, no. 6, pp. 3303–3313, 2020. [Google Scholar]
25. O. Banos, J. M. Galvez, M. Damas, H. Pomares and I. Rojas, “Window size impact in human activity recognition,” Sensors (Basel), vol. 14, no. 4, pp. 6474–6499, 2014. [Google Scholar] [PubMed]
26. S. Xie, R. Girshick, P. Dollár, Z. Tu and K. He, “Aggregated residual transformations for deep neural networks,” in 2017 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, pp. 5987–5995, 2017. [Google Scholar]
27. H. I. Fawaz, B. Lucas, G. Forestier, C. Pelletier, D. F. Schmidt et al., “InceptionTime: Result AlexNet for time series classification,” Data Mining Knowledge Discovery, vol. 34, no. 6, pp. 1936–1962, 2020. [Google Scholar]
28. M. Abadi, P. Barham, J. Chen, Z. Chen, A. Davis et al., “Tensorflow: A system for large-scale machine learning,” in 12th USENIX Conf. on Operating Systems Design and Implementation, Savannah, GA, USA, pp. 265–283, 2016. [Google Scholar]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools