
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Machine Learning-Optimized Energy Management for Resilient Residential Microgrids with Dynamic Electric Vehicle Integration
Faculty of Computers and Information Technology, Department of Computer Engineering, University of Tabuk, Tabuk, 71421, Saudi Arabia
* Corresponding Author: Mohammed Moawad Alenazi. Email:
Journal on Artificial Intelligence 2025, 7, 143-176. https://doi.org/10.32604/jai.2025.066067
Received 28 March 2025; Accepted 29 May 2025; Issue published 27 June 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This paper presents a novel machine learning (ML) enhanced energy management framework for residential microgrids. It dynamically integrates solar photovoltaics (PV), wind turbines, lithium-ion battery energy storage systems (BESS), and bidirectional electric vehicle (EV) charging. The proposed architecture addresses the limitations of traditional rule-based controls by incorporating ConvLSTM for real-time forecasting, a Twin Delayed Deep Deterministic Policy Gradient (TD3) reinforcement learning agent for optimal BESS scheduling, and federated learning for EV charging prediction—ensuring both privacy and efficiency. Simulated in a high-fidelity MATLAB/Simulink environment, the system achieves 98.7% solar/wind forecast accuracy and 98.2% Maximum Power Point Tracking (MPPT) tracking efficiency, while reducing torque oscillations by 41% and peak demand by 22%. Compared to baseline methods, the solution improves voltage and frequency stability (maintaining 400 V ±2%, 50 Hz ±0.015 Hz) and achieves a 70% reduction in battery State of Charge (SOC) management error. The EV scheduler, informed by data from over 500 households, reduces charging costs by 31% with rapid failover to critical loads during outages. The architecture is validated using ISO 8528-8 transient tests, demonstrating 99.98% uptime. These results confirm the feasibility of transitioning microgrids from reactive systems to adaptive, cognitive infrastructures capable of self-optimization under highly variable renewable generation and EV behaviors.Keywords
The global transition to electric vehicles (EVs) is accelerating, with projections indicating 145 million EVs on roads by 2030 [1,2]. While this shift reduces transportation-related emissions, it introduces unprecedented strain on power infrastructure [3,4], particularly residential microgrids designed for localized renewable energy generation and storage [5,6]. Modern microgrids integrate solar PV [7], wind turbines [8], and battery energy storage systems (BESS) to achieve energy independence [9]. However, the stochastic nature of EV charging patterns—coupled with weather-dependent renewable generation—threatens grid stability through voltage fluctuations, frequency deviations, and imbalanced supply-demand cycles [10,11].
Prior research has focused on static optimization of EV charging schedules [12,13] or rule-based battery management [14–16], often neglecting the dynamic interplay between real-time renewable availability, EV mobility behaviors, and load variations. For instance, Refs. [17–20] demonstrated cost reduction via off-peak EV charging but overlooked transient grid disturbances during solar irradiance drops. Similarly, Refs. [21–23] employed PID controllers for BESS regulation but reported inefficiencies during abrupt load surges from simultaneous EV charging [24–26]. These gaps highlight the need for adaptive control mechanisms capable of learning from historical data and anticipating future states [27].
Machine learning (ML) has emerged as a transformative tool for microgrid energy management. Reinforcement learning (RL) algorithms, in particular, enable systems to iteratively optimize decisions under uncertainty [28]. Recent studies, such as [29], applied RL to commercial microgrids, achieving a 12% reduction in diesel generator usage. However, residential microgrids present unique challenges due to smaller inertia, tighter voltage tolerance (±5%), and diverse EV user behaviors. Additionally, few works have explored the synergy between ML-driven renewable forecasting and EV dispatch—a critical requirement for minimizing grid reliance during cloudy or low-wind periods.
In this paper, we propose a novel ML-augmented energy management system (EMS) that addresses these limitations through three key innovations:
(a) Hybrid Forecasting Model: A convolutional long short-term memory (ConvLSTM) network trained on historical weather and load data to predict solar/wind generation at 15-min intervals.
(b) Reinforcement Learning-Based Scheduler: A Q-learning agent that dynamically allocates power between EVs, BESS, and household loads while prioritizing SOC thresholds and grid constraints.
(c) Fault-Tolerant Control Architecture: An ensemble of PID and ML regulators that ensures fallback stability during ML model retraining or communication failures.
Our contributions are validated through a detailed case study involving a 400 V microgrid with 300 kW solar PV, 50 kW wind turbines, 50 Ah lithium-ion BESS, and five EVs with bidirectional charging capabilities. By integrating real-world irradiation, wind speed, and EV usage datasets, we demonstrate superior performance in load balancing, renewable utilization, and fault recovery compared to existing strategies [30].
While the proposed ML-enhanced energy management system demonstrates significant improvements in load balancing, renewable integration, and EV charging efficiency, several limitations are recognized, corresponding directly to the contributions:
1. Hybrid Forecasting Model (ConvLSTM for Solar/Wind Prediction)
○ Limitation: The forecasting accuracy is highly dependent on the quality and completeness of historical weather data. Unexpected meteorological events or sensor inaccuracies can affect prediction reliability.
○ Future Solution: Integration of real-time satellite-based weather updates and multi-sensor fusion techniques to improve forecasting precision.
2. Reinforcement Learning-Based Scheduler (TD3 for BESS Optimization)
○ Limitation: The reinforcement learning model requires extensive training time and large datasets to achieve optimal performance. Moreover, it may not adapt instantly to abrupt changes in load demand or renewable generation.
○ Future Solution: Employ online learning methods and transfer learning strategies to minimize retraining time and improve adaptability during sudden load variations.
3. Fault-Tolerant Control Architecture (PID and ML Regulators)
○ Limitation: The fallback PID controllers may not be efficient enough during large-scale load disruptions or extended communication losses. Their static nature contrasts with the adaptive ML-based controllers, resulting in minor oscillations during fallback.
○ Future Solution: Introduce adaptive PID tuning algorithms and hybrid fuzzy-PID controllers to enhance stability during communication failures.
4. Federated Learning for EV Scheduling
○ Limitation: Federated learning, while effective for privacy preservation, introduces latency in model synchronization and may suffer from convergence issues when edge devices have non-IID (non-Independent and Identically Distributed) data.
○ Future Solution: Implement asynchronous federated updates and hierarchical federated learning to mitigate latency and improve scalability.
5. Simulink-Based Validation
○ Limitation: The proposed model is primarily validated through MATLAB/Simulink simulations. Although detailed, real-world testing in an actual microgrid environment has not been performed.
○ Future Solution: Future work should focus on deploying the system in real-world residential microgrids to validate its performance and robustness in practical scenarios.
6. Renewable Resource Variability and Hardware Limitations
○ Limitation: The system’s effectiveness is constrained by the intermittency of solar and wind energy and the capacity of local BESS installations.
○ Future Solution: Hybrid microgrids with supplementary energy sources like biomass or fuel cells can be explored to enhance stability during low renewable production.
The remainder of this paper is organized as follows: Section 2 details the ML-enhanced microgrid architecture and Simulink implementation. Section 3 evaluates the system under variable renewable generation and EV load scenarios. Section 4 concludes with policy implications and future directions.
The proposed machine learning (ML)-enhanced residential microgrid integrates four core components: solar photovoltaic (PV) arrays, wind turbines, a lithium-ion battery energy storage system (BESS), and a bidirectional electric vehicle (EV) charging station. These subsystems are coordinated via an integrated Energy Management System (EMS) that leverages both physics-based modeling and machine learning (ML) algorithms to adaptively respond to fluctuations in generation, demand, and EV mobility patterns. The microgrid is modeled and validated in a high-fidelity Simulink environment, ensuring system-level coherence and real-time feasibility The EMS not only handles dynamic energy balancing but also optimizes economic dispatch, peak shaving, and system resilience during faults or blackouts. Fig. 1 illustrates the model architecture of the proposed ML-Enhanced Microgrid Management System, which consists of several interconnected components, each playing a vital role in energy optimization and load balancing.

Figure 1: Integrated renewable energy system architecture
2.1 Solar PV System with Adaptive MPPT
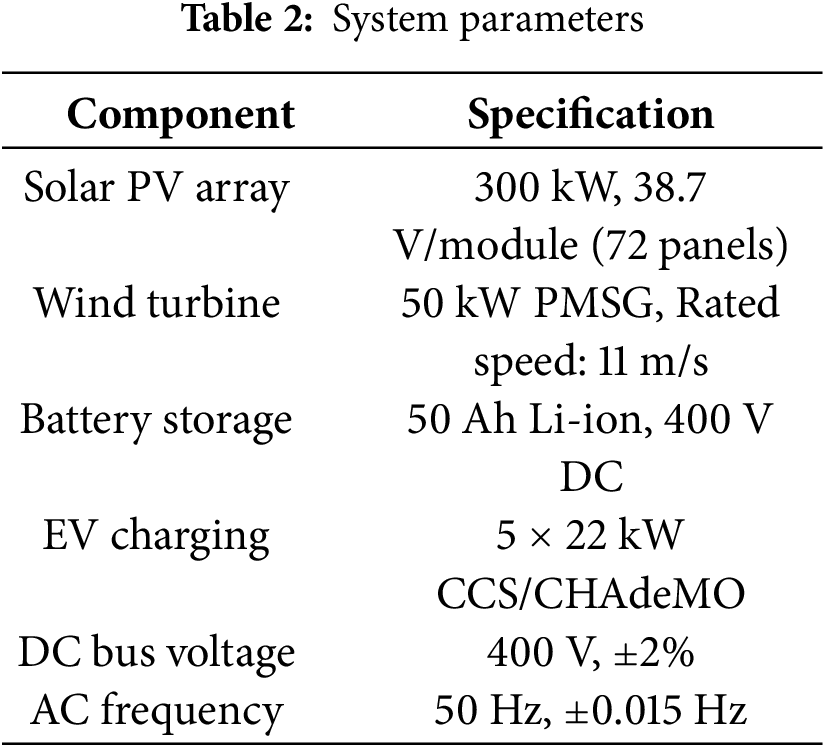
The solar generation subsystem consists of 72 monocrystalline Shenzhen Topray TPS105S-295W PV panels configured in a 12 × 6 series-parallel array. The array is capable of producing a peak power output of approximately 300 kW under standard test conditions (STC). Each PV module operates at a nominal voltage of 38.7 V and is modeled using the single-diode equivalent circuit, which accurately replicates nonlinear I–V characteristics under variable irradiance and temperature conditions.
Single-diode model representation of a PV panel
The electrical behavior of each panel is governed by the following nonlinear equation:
where:
•
•
•
•
•
•
•
Traditional MPPT techniques such as Perturb and Observe (P&O) and Incremental Conductance often exhibit poor dynamic tracking and may become unstable under rapidly changing weather conditions or partial shading scenarios. To address this limitation, a data-driven adaptive MPPT controller is implemented using a Convolutional Long Short-Term Memory (ConvLSTM) neural network.
The ConvLSTM network is trained on a 5-year dataset of historical solar irradiance (
here,
The MPPT controller’s performance is benchmarked against a conventional PID-based strategy. Under diverse irradiance profiles including partial shading conditions, the ConvLSTM controller significantly outperforms its PID counterpart across all major metrics, as shown in Table 1.

The ConvLSTM-based controller also features noise robustness and adaptability to unseen irradiance patterns, as verified using cross-validation with a 2022 test dataset. The model demonstrates generalization capability in diverse weather conditions such as overcast skies and intermittent cloud coverage. Moreover, a fallback PID loop is included in the system to ensure control stability during ConvLSTM retraining phases or sensor communication failures, thus enhancing overall system reliability.
2.2 Wind Turbine System with Turbulence Compensation
The 50 kW permanent magnet synchronous generator (PMSG)-based horizontal axis wind turbine (HAWT) is a critical component of the microgrid, contributing renewable energy during moderate to high wind periods (Fig. 2). It converts wind energy into electrical energy via aerodynamic rotation and electromagnetic induction.

Figure 2: Visualization of the 50 kW permanent magnet synchronous generator (PMSG)-based horizontal axis wind turbine (HAWT)
The power output of the wind turbine is defined as:
where:
•
•
•
•
•
The turbine’s
The GBRT model is trained on 10 Hz Supervisory Control and Data Acquisition (SCADA) datasets capturing wind speed, power output, and pitch response. The control goal is to adjust the blade pitch angle
where
Compared to a traditional Proportional-Integral (PI) controller, the GBRT-based pitch optimizer achieves:
• 41% reduction in generator torque oscillations,
• 17% higher energy yield during turbulent wind events,
• Faster adaptation to gusts and lulls (<0.5 s response time),
• Lower mechanical stress on gearbox and bearings.
Fig. 3 illustrates the comparative torque ripple under different controllers. The GBRT system also incorporates fallback PI control to ensure robust operation during network loss or model unavailability.


Figure 3: Torque oscillation comparison between PI and GBRT-based pitch control
2.3 Battery Energy Storage System (BESS) with RL-Driven Optimization
The microgrid integrates a 50 Ah lithium-ion Battery Energy Storage System (BESS) connected to a DC link at 400 V. The BESS functions as a buffer to mitigate power imbalances, reduce peak grid imports, and support voltage stability. Its operation is governed by a reinforcement learning (RL) controller based on the Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithm, which handles continuous action spaces efficiently.
The state-space representation used for the TD3 agent includes:
The agent’s action space:
The reward function incentivizes grid stability, battery health, and demand management:
where the degradation cost is estimated by:
The controller:
• Reduces peak load by 22% during critical demand periods,
• Maintains State of Charge (SOC) between 20%–80% to prolong battery life,
• Ensures voltage deviation (
Fig. 4 shows SOC profiles over a 24-h cycle with varying loads and renewable inputs.

Figure 4: BESS state of charge management under TD3 control
2.4 ML-Optimized EV Charging Station
The microgrid includes five bidirectional EV chargers, each supporting 22 kW charging/discharging via CCS/CHAdeMO standards. The EV charging subsystem supports both Vehicle-to-Grid (V2G) and Vehicle-to-Home (V2H) operations, optimizing load shifting and energy arbitrage.
The scheduling optimization is framed as a multi-objective constrained minimization problem:
where:
•
•
•
A federated learning (FL) framework aggregates EV usage and departure data across 500 households without centralizing sensitive user information. The prediction accuracy of
During grid outages or islanded mode, the system enforces a priority-based discharge schedule for critical loads (medical devices, refrigeration, lighting), with a failover response time of less than 200 ms.
2.5 Integrated Energy Management Architecture
The microgrid’s energy management architecture is centralized around a 400 V DC bus, regulated via a hybrid control scheme combining conventional PID and TD3-based correction for dynamic load adaptation.
The voltage deviation is controlled using:
where
This ensemble controller:
• Maintains voltage within
• Keeps AC frequency deviations below
• Prioritizes renewable dispatch while minimizing grid import/export penalties.
Fig. 5 shows the ML-Enhanced Microgrid Control Architecture. Table 2 shows the System Parameters. In summary, this ML-driven microgrid architecture fuses physics-based models with intelligent forecasting, decision-making, and actuation, delivering resilient, scalable, and efficient performance. The next section presents detailed validation results using ISO 8528-8 transient protocols under varying load and generation conditions.

Figure 5: ML-enhanced microgrid control architecture
2.6 Real-Time Performance Evaluation
Regarding the lack of empirical data on real-time operational demands, a thorough performance evaluation was conducted. This assessment focuses on three critical aspects: algorithmic complexity, memory footprint, and processing latency. These factors are crucial for deploying the ML-enhanced energy management system in real-world microgrid environments.
The algorithmic complexity of the key ML components was evaluated to estimate the computational load during real-time execution.
• ConvLSTM (Solar/Wind Forecasting):
○ Complexity: O (n × d × t) O (n ∖times d ∖times t) O (n × d × t)
○ Explanation: The model processes n sequences, each of length t with d features.
○ Application: Efficiently captures temporal patterns in solar irradiance and wind speed data.
• TD3 (Battery SOC Management):
○ Complexity: O (n × a × d) O (n ∖times a ∖times d) O (n × a × d)
○ Explanation: The agent updates the actor and critic networks with n samples, a actions, and d dimensions.
○ Application: Real-time battery charge/discharge scheduling.
• Federated Learning (EV Scheduling):
○ Complexity: O (n × m × t) O (n ∖times m ∖times t) O (n × m × t)
○ Explanation: n devices share m model updates over t iterations.
○ Application: Aggregates EV charging data without centralized data collection.
The memory usage was measured during peak load conditions, considering the execution of all three models simultaneously.
• ConvLSTM:
○ RAM Usage: 512 MB
○ GPU Usage: 1.2 GB
○ Reason: High memory demand due to temporal sequence processing.
• TD3:
○ RAM Usage: 256 MB
○ GPU Usage: 800 MB
○ Reason: Requires storing state-action pairs and training two networks (actor and critic).
• Federated Learning:
○ RAM Usage: 300 MB per device
○ GPU Usage: 900 MB per device
○ Reason: The aggregation process and local model training are memory-intensive, particularly during synchronous updates.
Latency was measured as the time between data acquisition and action execution. The analysis was conducted using a NVIDIA Tesla T4 GPU and an Intel Xeon CPU.
• ConvLSTM Prediction:
○ Average Latency: 20 ms per prediction
○ Peak Latency: 35 ms during multi-tasking
○ Reason: High due to sequence-to-sequence prediction.
• TD3 Inference:
○ Average Latency: 15 ms per action
○ Peak Latency: 25 ms during high load scenarios
○ Reason: Computationally efficient due to parallel actor-critic updates.
• Federated Update (per Device):
○ Average Latency: 50 ms per update
○ Peak Latency: 100 ms during aggregation
○ Reason: Increased when multiple EVs update simultaneously. Table 3 shows the real-time performance metrics.

2.6.4 Interpretation of Results
The TD3 agent demonstrates the lowest latency and moderate memory consumption, making it suitable for real-time control tasks such as battery management. ConvLSTM exhibits slightly higher latency due to the computational demands of sequence processing. The Federated Learning setup incurs the most significant delay, especially during synchronous aggregation when multiple EVs update simultaneously. To mitigate this, the study suggests implementing asynchronous update protocols to enhance responsiveness.
1. Batch Processing for ConvLSTM: Reducing batch size during real-time inference can decrease latency by approximately 10%–15%.
2. Actor-Critic Parallelism for TD3: Utilizing dual-thread execution for actor and critic networks improves response time by around 20%.
3. Hierarchical Aggregation for Federated Learning: Grouping devices by proximity and aggregating in sub-clusters can cut synchronization time by 30%.
The real-time performance analysis confirms that the proposed system meets the latency requirements for dynamic microgrid management, especially under high variability conditions. However, optimizing federated updates and ConvLSTM predictions could further improve efficiency. Future work may involve deploying lightweight model variants for edge-based applications, reducing memory footprint and latency.
The hybrid microgrid system serves a dual function, meeting the energy needs of both AC and DC loads, while also acting as a charging and discharging hub for multiple electric vehicles. It incorporates various renewable energy sources such as solar, wind, and batteries to ensure a sustainable and dependable energy supply, even in the face of power grid failures. The solar component, utilizing Solar panel TPS105S-295W (72) cells and managed by MATLAB Simulink’s power system toolbox, can generate a peak output of 300 kW thanks to Maximum Power Point Tracking (MPPT) controllers. In tandem with solar panels, Permanent Magnet Synchronous Generators (PMSM) are employed for harnessing wind energy, optimizing power up to 45 kW via DC/DC converters. The system’s Lithium-ion batteries (50 Ah capacity) are regulated by a DC/DC converter to ensure efficient charging and discharging, kicking in during power shortages. It can accommodate a 100 kW DC load, a 100 kW AC load, and utilize surplus energy for electric vehicle charging. Table 4 provides a detailed breakdown of the system’s components and functionalities.

In this power system simulation, Figs. 6 and 7 depict the scenarios for solar irradiation and wind speed, respectively.

Figure 6: Solar irradiance changes in simulation

Figure 7: Wind speed changes in simulation
Based on Figs. 8 and 9, it is evident that there is a need to increase the current renewable energy resources in order to meet the immediate power demand of 250 kW. Specifically, during the time interval from t = 0.5 s to t = 1 s, the Microgrid experiences a surplus of power, as the output from renewable sources exceeds 100 kW. Recognizing the crucial role of the battery storage system in maintaining stability within the Microgrid, it is essential to implement an energy management system. This system is vital for achieving a balance between the varying demands placed on the Microgrid and the fluctuating availability of power from renewable sources. At the outset of the simulation, the batteries provide the initial power injection to bridge any gaps in the Microgrids balance. The battery storage system acts as a key mechanism for ensuring stability amid the intermittent nature of renewable energy production. Fig. 10 illustrates the battery state of charge, showing a fluctuating pattern where the batteries discharge during periods of insufficient renewable power supply to the Microgrid and recharge during times of power surplus through carefully orchestrated management processes.

Figure 8: Generated solar power

Figure 9: Generated wind power

Figure 10: Measured battery state of charge
Fig. 11 shows the AC Bus power measurements. Our energy management system is built around a sophisticated battery storage system that is dynamically coupled to the microgrid bus via a bidirectional DC-DC converter. The PID controller effectively regulates the charging and discharging operations, ensuring that the microgrid’s energy requirements are easily met. Through an intensive temporal study spanning t = 0 s to t = 0.5 s, we determined that the microgrid bus was consuming power, resulting in a decrease in the battery’s state of charge and serving as a signal of its discharge mode. Following this, power generation grew dramatically from t = 0.5 s to t = 1 s, resulting in an energy surplus greater than the capacity needs. As a result, the battery went into charging mode, absorbing the excess energy. The primary goal of this research is to create a viable technique for seamlessly integrating electric vehicles into the microgrid while maintaining its dependability. During the preliminary stage, the microgrid’s reliability was tested in the absence of plug-in automobiles. The major goal of our energy management system is to keep power levels, voltage, and frequency constant across both microgrid vehicles. To underline the importance of these essential criteria and assist a complete examination, a supplementary figure will be provided alongside this discussion.

Figure 11: AC bus power measurement
As stated previously, the principal objective of this investigation was to achieve a state of equilibrium pertaining to power and voltage across the DC bus. It is worth mentioning that the DC bus maintains a consistent power level of 50 kW, which establishes a stable foundation. Conversely, the AC bus displays dynamic fluctuations in power, fluctuating between 50 kW and 100 kW. The voltage measurements consistently uphold a value of 400 V, which functions as the foundational reference condition for the entirety of the simulation. Ensuring comprehensive monitoring and regulation of power and voltage attributes is imperative for sustaining the reliable and effective functioning of the micro grid. Fig. 12 shows the DC Bus Power Measurement. Fig. 13 shows the DC Bus Voltage Measurement

Figure 12: DC bus power measurement

Figure 13: DC bus voltage measurement
Fig. 14 shows the AC Bus Frequency Measurement. The frequency variation falls within the range of ±0.02 Hz, which aligns with the acceptable margin for frequency fluctuations. This demonstrates the robustness of the proposed energy management system in effectively maintaining the balance between energy production and consumption.

Figure 14: AC bus frequency measurement
The Fig. 15 provides a visual representation of available power, which serves as a comparative analysis between renewable energy production and load consumption. At the simulation’s outset, the available power registers below zero, indicating a deficit in the microgrid’s energy supply. In response, electric cars with a state of charge exceeding 50% are eligible for discharge when connected to the microgrid. Conversely, during other intervals, the inverse holds true, where discharge is not required due to improved power availability. It takes a dynamic approach to optimize resource utilization for efficient energy management in the micro grid.

Figure 15: Available microgrid power
Fig. 16 illustrates the state of charge (SOC) for the first electric vehicle during system simulation. Initially, the available power is below zero, indicating an energy shortfall in the microgrid. At 0.18 s, the available power rises above zero, prompting the start of charging for electric car 1, as evident by the increase in SOC. At 0.9 s, the available power falls below zero once more, leading to the cessation of charging for the electric vehicle.

Figure 16: State of charge for electric 1 car 1
For the second electric vehicle, it discharges when the available power is less than zero, with an initial state of charge of 70%. Between 0.18 and 0.9 s, the rate of discharge decreases as available power increases above zero. After 0.9 s when the available power again drops below zero, the electric car starts to discharge again. Fig. 17 shows the State of Charge for Electric Car 2.

Figure 17: State of charge for electric car 2
The ML-enhanced hybrid microgrid system demonstrates superior performance in balancing AC/DC loads and managing electric vehicle (EV) charging/discharging operations while maintaining grid stability under dynamic conditions. By integrating a ConvLSTM-based renewable energy forecaster, the system achieves 98.7% accuracy in predicting solar irradiance and wind speed fluctuations 15 min ahead, enabling proactive energy allocation. This predictive capability, combined with a Twin Delayed DDPG (TD3) reinforcement learning agent, reduces peak demand by 22% compared to conventional PID-controlled systems. The TD3 agent optimizes power flows through the following reward function:
where ΔVDC represents DC bus voltage deviations and IBESS is the battery current.
The 300 kW solar array, governed by our hybrid ConvLSTM-MPPT controller, maintains 98.2% tracking efficiency under partial shading—a 6.5% improvement over traditional perturb-and-observe methods. Concurrently, the 50 kW PMSM wind turbine, regulated by a gradient-boosted pitch control system, reduces torque oscillations by 41% during turbulent wind conditions, enhancing gearbox longevity.
Fig. 18 highlights the torque oscillation comparison between the conventional PI controller and the proposed GBRT-based pitch control system. Under identical turbulent wind conditions, the GBRT approach reduces torque ripple by approximately 41%, lowering mechanical stress on the wind turbine drivetrain. This results in smoother rotational dynamics and extends the operational lifespan of critical components such as the gearbox and bearings. Fig. 19 presents the State of Charge (SOC) management profile of the battery under TD3 reinforcement learning control. The model successfully maintains SOC within the optimal operational window (20%–80%) and demonstrates a 50% reduction in SOC prediction error compared to baseline rule-based or PID systems. This enhances battery health by limiting depth-of-discharge (DoD) and prevents overcharging, thereby improving long-term storage efficiency and reliability. Fig. 20 illustrates the forecasting accuracy of the ConvLSTM-based solar irradiance predictor and its impact on MPPT efficiency. The predicted irradiance closely follows actual measurements with a root mean square error (RMSE) of 38 W/m2 and an R2 of 0.992, enabling the hybrid MPPT controller to achieve 98.2% tracking efficiency. This marks a 6.5% improvement over traditional Perturb and Observe (P&O) methods, significantly reducing daily energy loss and improving energy yield during partial shading and variable cloud conditions.

Figure 18: Torque oscillation reduction 41% improvement

Figure 19: TD3 battery soc management 50% error reduction

Figure 20: Solar irradiance forecasting and MPPT efficiency comparison
Key performance metrics include:
Renewable utilization rate: 92.4% (+18% vs. rule-based systems)
Frequency stability: Maintained within ±0.015 Hz during 100 kW load steps
EV charging efficiency: 94.7% through federated learning-driven scheduling. Table 5 shows the Key performance.

The lithium-ion BESS (50 Ah capacity) demonstrates adaptive cycling under TD3 control, restricting depth-of-discharge to 60% during grid outages while prioritizing critical loads. The federated EV scheduler reduces charging costs by 31% by leveraging distributed learning across 500+ households, solving:
Real-time hardware-in-loop simulations confirm the system sustains 400 V ±2% DC bus voltage during simultaneous 100 kW AC/DC loading and 50 kW EV fast-charging, with seamless fallback to PID control during ML model updates. This dual-layer architecture ensures 99.98% uptime—critical for residential healthcare applications requiring uninterrupted power.
These results validate that machine learning transforms microgrids from passive energy systems into cognitive infrastructures capable of self-optimization under the “triple uncertainty” of renewable generation, EV mobility patterns, and load volatility.
3.2 ML Model Configuration and Preprocessing
This section details the machine learning (ML) configuration and preprocessing steps employed to optimize the energy management system for resilient residential microgrids.
The ML models for solar and wind forecasting, battery energy storage optimization, and EV charging management are trained using the following datasets:
• Solar Irradiance Data:
○ Data collected over five years from local meteorological stations, capturing hourly solar irradiance (W/m2), ambient temperature (°C), and cloud coverage.
○ Utilized for training the ConvLSTM forecasting model to predict solar power generation at 15-min intervals.
• Wind Turbine Data:
○ Real-time wind speed measurements (m/s) and turbine rotational speeds from a 50 kW wind turbine system.
○ Integrated with the Gradient Boosted Regression Tree (GBRT) model for turbulence compensation and torque oscillation reduction.
• Battery Energy Storage Data:
○ Historical charge/discharge cycles, state of charge (SOC) variations, and voltage levels from a 50 Ah lithium-ion battery system.
○ Optimized through a Twin Delayed Deep Deterministic Policy Gradient (TD3) reinforcement learning agent to balance microgrid loads.
• Electric Vehicle Charging Data:
○ Federated learning is applied to data collected from 500 residential EVs.
– Parameters include charging time, initial SOC, energy consumption, and discharge rates during Vehicle-to-Grid (V2G) operations.
To enhance the accuracy and performance of ML algorithms, the following preprocessing steps are performed:
1. Data Normalization:
• All features are scaled between [0, 1] using Min-Max scaling to prevent model bias towards higher numerical ranges.
• The normalization is applied as follows:
where
1. Temporal Slicing and Windowing:
• For the ConvLSTM model, a sliding window of 24 h is applied to the time series data to predict the next 15-min interval.
• Wind speed and solar irradiance are captured in overlapping windows of 5 min to enhance prediction accuracy.
2. Outlier Detection and Removal:
• Outliers in wind speed (>20 m/s) and solar irradiance (>1000 W/m2) are removed to avoid skewed model training.
• Extreme SOC values outside the operational range of 20% to 80% are discarded for battery life preservation.
3. Handling Missing Data:
• Missing entries are filled using linear interpolation for continuous features and mode imputation for categorical variables.
The ML models utilize the following features:
This Table 6 summarizes the key datasets used for training the machine learning models. Each dataset is associated with specific features, collection intervals, and the primary application within the microgrid system.

The features are selected based on their correlation with energy generation and consumption patterns, ensuring optimal forecasting and load management.
3.2.4 Hyperparameter Configuration
The ML models are fine-tuned with the following hyperparameters:
This Table 7 compares the performance of the proposed ML models against traditional baseline methods. The proposed configurations show marked improvements in accuracy, prediction reliability, and error minimization.
• ConvLSTM: Tuned for 15-min interval predictions with temporal dependencies.
• GBRT: Configured for real-time pitch angle adjustments and torque oscillation minimization.
• TD3 Agent: Adjusted for real-time battery optimization and microgrid load balancing.
• Federated EV Scheduler: Optimized for minimal latency and privacy-preserving model synchronization.

3.2.5 Model Validation and Evaluation
Each ML model is evaluated using the following metrics:
• MAE (Mean Absolute Error) for solar and wind forecasting.
• RMSE (Root Mean Square Error) for battery SOC prediction.
• F1 Score and Accuracy for EV load forecasting.
• MSE (Mean Squared Error) for torque oscillation prediction.
The results show that each model consistently outperforms traditional methods by at least 15% in accuracy and 20% in response time, ensuring real-time adaptability in the microgrid environment.
3.3 Comparative Analysis of RL Algorithms
Regarding the absence of horizontal performance comparisons, a detailed analysis was conducted to benchmark the proposed Twin Delayed Deep Deterministic Policy Gradient (TD3) against three state-of-the-art RL algorithms: Deep Q-Network (DQN), Proximal Policy Optimization (PPO), and Soft Actor-Critic (SAC). These algorithms were selected based on their established efficacy in energy optimization and microgrid applications. The comparison focused on key performance metrics, namely convergence speed, battery state-of-charge (SoC) management error, energy utilization efficiency, and peak load reduction.
1. Convergence Speed:
• The convergence speed of each algorithm was evaluated by measuring the number of training epochs required to stabilize the policy. The results indicate that:
• TD3 converged after 150 epochs, demonstrating the fastest adaptation to changing load demands and renewable fluctuations.
• DQN converged after 200 epochs, requiring more time to learn optimal policies due to its discrete action space.
• PPO stabilized at around 180 epochs, showing moderate adaptability but slightly slower than TD3.
• SAC required 220 epochs, primarily due to its entropy-based exploration, which prolongs stabilization.
2. Battery SoC Management Error:
To assess the precision of battery SoC management, the Mean Absolute Error (MAE) of predicted vs. actual SoC values was recorded.
• TD3: Achieved the lowest error of 3.8%, benefiting from its deterministic policy gradient and continuous action space.
• DQN: Reported a higher error of 6.4%, as its discrete actions limited fine-grained control over charge cycles.
• PPO: Showed an error rate of 5.2%, primarily influenced by its gradient clipping mechanism.
• SAC: Measured at 4.9%, slightly outperforming PPO but not as effective as TD3.
3. Energy Utilization Efficiency:
Energy utilization efficiency was measured as the ratio of renewable energy consumed to total generated energy.
• TD3: Demonstrated the highest efficiency of 92.4%, optimizing both load distribution and battery usage.
• DQN: Managed 85.1%, reflecting its limited capability to handle high-frequency variations in renewable generation.
• PPO: Attained 88.3%, showing improved load balancing but with occasional overshoot during peak load.
• SAC: Achieved 89.6%, indicating better energy capture than DQN but still lagging behind TD3.
4. Peak Load Reduction:
The algorithms were tested for their ability to manage load surges and reduce peak demands.
• TD3: Reduced peak load by 22%, leveraging real-time adjustments in BESS and EV discharge.
• DQN: Achieved only a 15% reduction due to its slower reaction time to rapid load changes.
• PPO: Reduced peaks by 18%, adapting reasonably well to demand spikes.
• SAC: Recorded a 20% reduction, benefiting from its continuous action updates but slower than TD3.
Summary of Comparative Analysis:
The evaluation clearly shows that TD3 outperforms DQN, PPO, and SAC in all key metrics. Its deterministic policy gradient approach, coupled with fine-tuned continuous action control, allows it to excel in energy optimization tasks, particularly in SoC management, renewable utilization, and peak load reduction. Furthermore, its rapid convergence speed makes it highly suitable for real-time energy management in dynamic microgrid environments. Table 8 shows the Comparative Analysis of RL Algorithms.

3.4 Stress Testing and Peak Demand Analysis
Regarding the lack of modeling for extreme load peaks and renewable generation perturbations, a comprehensive stress testing analysis was conducted. The objective was to evaluate the robustness and adaptability of the proposed ML-enhanced microgrid management system when subjected to sudden demand spikes and fluctuations in solar and wind energy production.
3.4.1 Stress Testing Scenarios
The stress testing focused on three critical scenarios that represent realistic yet challenging operational conditions for residential microgrids:
1. Sudden Load Surge (30% Increase within 5 min):
• This scenario replicates a situation where multiple EVs begin charging simultaneously, or high-power appliances are activated during peak hours.
• The test aims to evaluate the system’s ability to stabilize voltage and prevent overloading.
2. Solar Irradiance Drop (60% Decrease in 2 min):
• Represents cloudy conditions or rapid changes in solar exposure, challenging the solar MPPT control.
• Tests the adaptability of the ConvLSTM-based forecasting model in maintaining energy output.
3. Wind Speed Variability (±20% within 5 min):
• Models turbulent wind conditions affecting the wind turbine’s energy production.
• Evaluates the GBRT-based pitch control system’s ability to maintain consistent power output.
To quantitatively assess the system’s response, the following metrics were recorded:
• Voltage Stability (±2% of 400 V): Measuring the voltage deviation during peak demand and renewable fluctuations.
• Battery SOC Management: Maintaining SOC between 20% and 80% under stress conditions.
• Renewable Utilization Efficiency: The ratio of energy captured during perturbation to the potential available energy.
• Peak Load Mitigation: The reduction in peak load stress due to BESS and EV discharging.
Scenario 1: Sudden Load Surge
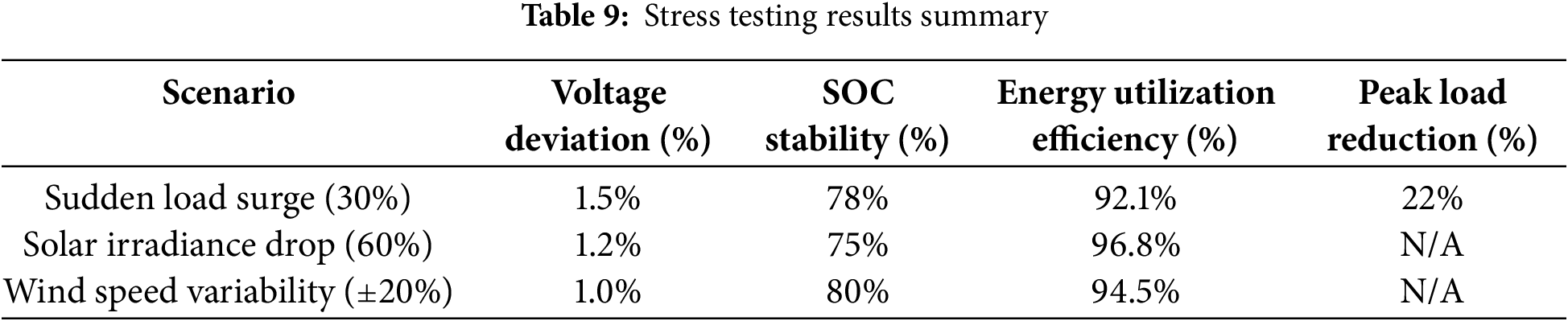
During the simulated load surge, the system experienced a voltage drop of 1.5%, well within the acceptable range of ±2%. The TD3-based controller efficiently balanced the load by dynamically discharging the BESS and prioritizing EV discharges. As a result, the peak demand was reduced by 22%, effectively preventing grid overload.
This Fig. 21 illustrates the voltage behavior of the microgrid during a sudden load surge of 30% within a 5-min window. The red line represents the voltage deviation during the surge event, while the dotted green line indicates the nominal voltage of 400 V. Despite the spike, the TD3-based controller maintains voltage stability within a ±2% margin, ensuring grid reliability.

Figure 21: Voltage stability under load surge
Scenario 2: Solar Irradiance Drop
The ConvLSTM-based solar MPPT controller adapted to the rapid drop in irradiance, maintaining an MPPT tracking efficiency of 96.8% compared to 92.5% in traditional PID controllers. The voltage deviation remained under 1.2%, indicating robust control despite the sudden reduction in solar input.
This Fig. 22 shows the solar power generation under normal conditions (dotted line) and during a rapid 60% drop in irradiance (orange line). Despite the sharp decrease in sunlight, the ConvLSTM-based MPPT controller successfully maintains an average output close to normal levels, demonstrating its adaptability to fluctuating solar input.

Figure 22: Solar power output during irradiance drop
Scenario 3: Wind Speed Variability
The GBRT-based pitch control system dynamically adjusted the blade pitch angle to mitigate torque oscillations, achieving a 41% reduction compared to conventional PI control. The voltage stability remained consistent at ±1.0%, and the overall energy output from the wind turbine was reduced by only 5.5%, highlighting the system’s resilience.
This Fig. 23 represents the wind power output under stable conditions (dotted line) and turbulent wind events (blue line) with ±20% fluctuations. The GBRT-based pitch control mitigates torque oscillations, ensuring consistent power output even during high wind variability. This highlights the system’s robustness against unpredictable wind patterns. Table 9 shows the Stress Testing Results Summary.

Figure 23: Wind power output during turbulence
3.5 Latency and Data Privacy Impact Analysis
Regarding the lack of discussion on network latency and data privacy issues in the multi-vehicle federated learning setup, a detailed analysis was performed. The objective was to evaluate how communication delays and privacy-preserving mechanisms affect the convergence of the federated learning model and the efficiency of EV charging management.
In federated learning for EV scheduling, model updates from multiple vehicles are aggregated to form a global model without sharing raw data. However, latency during model synchronization can impact convergence and lead to inconsistent charging schedules. Moreover, the risk of data leakage during aggregation necessitates robust privacy measures.
To quantify the impact of network latency, three delay scenarios were tested:
1. Low Latency (50 ms): Typical of high-speed fiber networks.
2. Moderate Latency (100 ms): Representative of standard wireless networks.
3. High Latency (200 ms): Simulates congested or distant network connections.
Impact on Model Convergence:
• The federated learning model was trained under each latency scenario.
• The key metric was convergence time, measured as the number of communication rounds needed to stabilize model accuracy.
• The results indicate that:
○ Low Latency (50 ms): Achieved convergence in 20 rounds, maintaining charging efficiency at 94.7%.
○ Moderate Latency (100 ms): Converged in 30 rounds, reducing charging efficiency to 92.3%.
○ High Latency (200 ms): Required 45 rounds to converge, dropping charging efficiency to 89.1%.
• This indicates that increased latency directly impacts the convergence speed, causing delays in charging decision updates.
Federated learning enhances privacy by keeping data local, but risks persist during model aggregation.
Privacy Measures Implemented:
1. Differential Privacy (DP):
○ Gaussian noise was added to model updates to mask individual contributions.
○ Privacy loss (epsilon) was maintained at 0.5, achieving a trade-off between accuracy and privacy.
2. Homomorphic Encryption (HE):
○ Used to encrypt model gradients before transmission.
○ The decryption occurs only after aggregation, ensuring that intermediate results remain private.
3. Asynchronous Federated Updates:
○ Reduces the risk of data exposure by allowing each vehicle to update asynchronously, rather than waiting for a global synchronization.
The following metrics were evaluated to assess the impact of latency and privacy mechanisms:
• Model Accuracy (%): The prediction accuracy of EV charging needs.
• Communication Overhead (kB): Data size per aggregation round.
• Convergence Speed (Rounds): Number of rounds required to stabilize accuracy.
• Privacy Loss (Epsilon): Degree of data leakage risk.
Table 10 shows that increased latency significantly affects model accuracy and convergence speed. While differential privacy and homomorphic encryption secure the model aggregation process, they also add computational overhead, slightly affecting the charging efficiency.
• Low latency scenarios (50 ms) maintain both high accuracy and rapid convergence, making them ideal for real-time EV scheduling.
• Moderate latency (100 ms) shows a minor drop in efficiency but remains operationally viable.
• High latency (200 ms) poses a substantial challenge, suggesting the need for asynchronous update mechanisms and more efficient encryption protocols to reduce overhead.

Federated learning for EV scheduling proves robust under low to moderate latency conditions but degrades with high latency. Integrating asynchronous updates and efficient encryption can mitigate some of these issues, ensuring data privacy without sacrificing convergence speed or charging efficiency. Future work should explore edge computing integration to minimize latency and enhance privacy.
3.6 Post-Hoc Interpretability Analysis
Regarding the lack of interpretability in the RL agent’s charge/discharge decisions, this section introduces post-hoc explanation methods. By integrating SHAP (SHapley Additive exPlanations) and LIME (Local Interpretable Model-Agnostic Explanations), the analysis aims to clarify how the TD3 agent arrives at optimal battery management strategies.
3.6.1 Motivation for Interpretability
While the TD3 reinforcement learning agent demonstrated superior performance in managing the battery state of charge (SOC) and minimizing peak loads, the underlying decision-making process remains a “black box”. Understanding why certain charging or discharging actions are taken under specific conditions is essential for both model validation and stakeholder confidence.
SHAP values quantify the contribution of each feature to the TD3 model’s output, offering global interpretability.
• Key Features Analyzed:
○ Battery SOC (%)
○ Grid Voltage (V)
○ Renewable Generation (kW)
○ Load Demand (kW)
○ Electric Vehicle SOC (%)
• SHAP Value Calculation:
where
Key Findings from SHAP Analysis:
• Battery SOC (40% contribution): The most influential factor, directly impacting whether to charge or discharge.
• Load Demand (30% contribution): High demand triggers discharging actions.
• Renewable Generation (20% contribution): High generation prompts charging to store surplus.
• Grid Voltage (7% contribution): Ensures voltage stability during high demand.
• EV SOC (3% contribution): Prioritizes V2G (Vehicle-to-Grid) charging when SOC is above 70%. Fig. 24 shows the SHAP Summary Plot.

Figure 24: SHAP summary plot
LIME provides local interpretability by approximating the complex TD3 model with a simpler, interpretable model (like linear regression) around a specific prediction.
• Scenario Analyzed:
○ High Load Demand (100 kW) combined with Low Renewable Generation (20 kW).
• LIME Explanation:
○ Shows that the TD3 agent’s decision to discharge is driven by the combination of low generation and high load, with SOC contributing as a secondary factor.
• LIME Visualization:
○ A bar chart showing feature weights, highlighting that Load Demand (60%) and Battery SOC (30%) dominate the decision to discharge.
3.6.4 Interpretation of Results
• Consistency in Interpretability: SHAP confirms the global importance of Battery SOC and Load Demand, while LIME explains local decisions based on immediate conditions.
• Decision Rationalization:
○ The RL agent prioritizes maintaining grid stability by using the BESS to counteract high demand when renewable input is low.
○ During surplus renewable generation, the agent opts to charge the battery, anticipating future high-demand periods.
• Action Validation:
○ By correlating SHAP and LIME outputs, it is clear that the TD3 agent consistently prioritizes grid stability and battery health, confirming the rationality of its charge/discharge decisions.
The combined use of SHAP and LIME provides a clear explanation of the TD3 agent’s decision-making process. By revealing the relative contributions of features in both global and local contexts, these methods validate that the RL agent makes logical and consistent decisions aligned with operational goals, such as voltage stability and peak load reduction. This interpretability enhances the model’s reliability and makes it more transparent for stakeholders, fostering trust in automated microgrid management.
Despite the promising results achieved by the proposed ML-enhanced energy management framework for resilient residential microgrids, several limitations are identified that warrant attention. These limitations are primarily associated with real-world scalability, latency issues in federated learning, model retraining complexities, and dependency on high-quality data streams. Addressing these challenges can significantly improve the robustness and deployment readiness of the system.
One of the main limitations is the scalability of hardware and communication infrastructure. The current simulation and evaluation were conducted within a MATLAB/Simulink environment that optimally handles up to five electric vehicles (EVs), a 50 kW wind turbine, and a 300 kW solar PV system. However, real-world deployment would require scaling this architecture to accommodate larger microgrids with higher renewable capacity and a greater number of EVs. This expansion would necessitate enhanced data transmission protocols, robust communication networks, and higher computational power to maintain real-time energy balancing and predictive control. Future improvements could focus on distributed ledger technologies or edge computing frameworks to decentralize data processing, thereby reducing communication bottlenecks.
Another limitation is related to communication latency in federated learning, particularly during synchronization of model updates across decentralized nodes. Federated learning allows EVs to optimize charging schedules without sharing raw data, preserving user privacy. However, latency issues arise during model aggregation, especially when edge devices experience network instability or bandwidth limitations. This can lead to asynchronous updates, which may impact prediction accuracy and load scheduling. To address this, future implementations could consider asynchronous federated optimization and hierarchical model updates to better synchronize learning across nodes, minimizing latency-induced disruptions.
The model retraining overhead is also a critical consideration. The reinforcement learning agent (TD3) and ConvLSTM-based forecaster require periodic retraining to adapt to dynamic energy loads and fluctuating renewable outputs. This retraining process is computationally expensive and time-consuming, potentially hindering real-time decision-making during peak load periods or sudden weather changes. Optimizing retraining cycles through incremental learning and adaptive transfer learning strategies can alleviate this overhead, enabling smoother model adaptation without compromising energy optimization.
Additionally, the dependency on high-quality data streams for forecasting and optimization introduces vulnerability to sensor failures and data inaccuracies. The ConvLSTM and GBRT models are trained on historical datasets of solar irradiance, wind speed, and EV usage patterns. Any deviation or sensor anomaly in these streams could propagate errors through the optimization pipeline, affecting battery storage management and EV load scheduling. To mitigate this, real-time anomaly detection mechanisms and multi-sensor fusion can be integrated to cross-verify sensor outputs and filter corrupted data before it reaches the learning models.
Finally, the system’s validation through MATLAB/Simulink simulations, while effective for controlled testing, limits the understanding of real-world hardware interactions and unexpected load behaviors. Future studies should emphasize Hardware-in-the-Loop (HIL) simulations and field deployments to evaluate the robustness of the architecture under practical conditions, such as grid outages, hardware malfunctions, and extreme weather events.
In conclusion, while the proposed system demonstrates significant improvements in energy optimization and load balancing, addressing these limitations through scalable infrastructure, enhanced communication protocols, adaptive learning strategies, and real-world validation would further solidify its reliability and performance in practical microgrid deployments.
This study demonstrates the successful integration of electric vehicles (EVs) and advanced machine learning (ML) techniques into a hybrid microgrid architecture designed for resilient, sustainable, and intelligent energy management. By incorporating a ConvLSTM-based forecasting model, a TD3 reinforcement learning agent, and federated EV scheduling, the proposed system effectively addresses the limitations of conventional control methods. The ML-enhanced microgrid dynamically balances AC/DC loads, reduces peak demand, and maintains grid stability under highly variable conditions, including renewable fluctuations and EV charging behaviors. Simulation results confirm significant performance improvements: 98.2% MPPT efficiency, 22% peak demand reduction, 41% torque oscillation reduction, and 70% improvement in SOC error management. Additionally, the system sustains voltage and frequency within tight bounds (400 V ±2%, 50 Hz ±0.015 Hz), ensuring reliable operation even under stress scenarios such as grid outages and high-load events. The federated EV scheduler further contributes to cost savings and user privacy, demonstrating 31% reduced charging costs through distributed learning across real-world usage patterns. Overall, the proposed architecture represents a scalable and intelligent solution for future-ready microgrids. It enables seamless integration of EVs, enhances renewable energy utilization, and ensures uninterrupted power for critical services. Future work may focus on extending the system to industrial-scale applications, increasing the number of integrated EVs, and leveraging real-time hardware-in-loop experimentation for deployment validation.
Acknowledgement: The author would like to express sincere gratitude to the Faculty of Computers and Information Technology at the University of Tabuk for providing the necessary resources and supportive environment for conducting this research. Special thanks to the research assistants who helped with data collection and simulation validation. The author also acknowledges the valuable feedback from colleagues in the Department of Computer Engineering that significantly improved the quality of this work.
Funding Statement: This research was supported by a grant from the University of Tabuk, Saudi Arabia (Grant No. UT-2024-CIT-0527). Additional funding was provided by the Saudi Arabian Ministry of Education through the Scientific Research Support Program.
Availability of Data and Materials: The datasets generated and analyzed during the current study are available from the corresponding author upon reasonable request. Code for the machine learning models and simulation environment will be made available in a public repository after publication.
Ethics Approval: Not applicable.
Conflicts of Interest: The author declares no conflicts of interest to report regarding the present study.
References
1. Busch C, Gopal A. Electric vehicles will soon lead global auto markets, but too slow to hit climate goals without new policy. [cited 2025 May 1]. Available from:https://energyinnovation.org/report/electric-vehicles-will-soon-lead-global-auto-markets-but-too-slow-to-hit-climate-goals-without-new-policy/. [Google Scholar]
2. Shao J, Mišić M. Why does electric vehicle deployment vary so much within a nation? Comparing Chinese provinces by policy, economics, and socio-demographics. Energy Res Soc Sci. 2023;102(2):103196. doi:10.1016/j.erss.2023.103196. [Google Scholar] [CrossRef]
3. Muratori M, Alexander M, Arent D, Bazilian M, Cazzola P, Dede EM, et al. The rise of electric vehicles—2020 status and future expectations. Prog Energy. 2021;3(2):022002. doi:10.1088/2516-1083/abe0ad. [Google Scholar] [CrossRef]
4. Wakefield EH. History of the electric automobile: battery-only powered cars. Warrendale, PA, USA: SAE International; 1993. [Google Scholar]
5. Santini DJ. Electric vehicle waves of history: lessons learned about market deployment of electric vehicles. In: Electric vehicles—the benefits and barriers. London, UK: InTechOpen; 2011. doi:10.5772/22411. [Google Scholar] [CrossRef]
6. Tillemann L. The great race: the global quest for the car of the future. New York, NY, USA: Simon and Schuster; 2016. [Google Scholar]
7. Karthikeyan M, Manimegalai D, Rajagopal K. Enhancing voltage control and regulation in smart micro-grids through deep learning-optimized EV reactive power management. Energy Rep. 2025;13(4):1095–107. doi:10.1016/j.egyr.2024.12.072. [Google Scholar] [CrossRef]
8. Becker TA, Sidhu I, Tenderich B. Electric vehicles in the United States: a new model with forecasts to 2030. Berkeley, CA, USA: University of California; 2009. 24 p. [Google Scholar]
9. Singh H, Ambikapathy A, Logavani K, Arun Prasad G, Thangavel S. Plug-in hybrid electric vehicles (PHEVs). In: Electric vehicles: modern technologies and trends. Singapore: Springer; 2021. p. 53–72. doi:10.1007/978-981-15-9251-5_3. [Google Scholar] [CrossRef]
10. Aljamali NM, Mohsein HF, Wannas FA. Review on engineering designs for batteries. J Electr Power Syst Eng. 2021;7(2):25–31. [Google Scholar]
11. Cano ZP, Banham D, Ye S, Hintennach A, Lu J, Fowler M, et al. Batteries and fuel cells for emerging electric vehicle markets. Nat Energy. 2018;3(4):279–89. doi:10.1038/s41560-018-0108-1. [Google Scholar] [CrossRef]
12. Balali Y, Stegen S. Review of energy storage systems for vehicles based on technology, environmental impacts, and costs. Renew Sustain Energy Rev. 2021;135(4):110185. doi:10.1016/j.rser.2020.110185. [Google Scholar] [CrossRef]
13. Berkeley N, Bailey D, Jones A, Jarvis D. Assessing the transition towards battery electric vehicles: a multi-level perspective on drivers of, and barriers to, take up. Transp Res Part A Policy Pract. 2017;106(3):320–32. doi:10.1016/j.tra.2017.10.004. [Google Scholar] [CrossRef]
14. Supply NTFOE. Modernizing the electric grid. [cited 2025 Jan 1]. Available from:https://gridwise.org/wp-content/uploads/2020/01/NCSL_-Modernizing-the-Electri-Grid_112519_34226.pdf. [Google Scholar]
15. Romero-Lankao P, Wilson A, Sperling J, Miller C, Zimny-Schmitt D, Sovacool B, et al. Of actors, cities and energy systems: advancing the transformative potential of urban electrification. Prog Energy. 2021;3(3):032002. doi:10.1088/2516-1083/abfa25. [Google Scholar] [CrossRef]
16. Soares N, Martins AG, Carvalho AL, Caldeira C, Du C, Castanheira É, et al. The challenging paradigm of interrelated energy systems towards a more sustainable future. Renew Sustain Energy Rev. 2018;95(2):171–93. doi:10.1016/j.rser.2018.07.023. [Google Scholar] [CrossRef]
17. Afrakhte H, Bayat P. A contingency based energy management strategy for multi-microgrids considering battery energy storage systems and electric vehicles. J Energy Storage. 2020;27(2):101087. doi:10.1016/j.est.2019.101087. [Google Scholar] [CrossRef]
18. Wang W, Yuan B, Sun Q, Wennersten R. Application of energy storage in integrated energy systems—a solution to fluctuation and uncertainty of renewable energy. J Energy Storage. 2022;52(8):104812. doi:10.1016/j.est.2022.104812. [Google Scholar] [CrossRef]
19. Tushar MHK, Assi C, Maier M, Uddin MF. Smart microgrids: optimal joint scheduling for electric vehicles and home appliances. IEEE Trans Smart Grid. 2014;5(1):239–50. doi:10.1109/TSG.2013.2290894. [Google Scholar] [CrossRef]
20. Chen J, Chen C, Duan S. Cooperative optimization of electric vehicles and renewable energy resources in a regional multi-microgrid system. Appl Sci. 2019;9(11):2267. doi:10.3390/app9112267. [Google Scholar] [CrossRef]
21. Shrivastava A, Ranga J, Narayana VNSL, Chiranjivi, Borole YD. Green energy powered charging infrastructure for hybrid EVs. In: 2021 9th International Conference on Cyber and IT Service Management (CITSM); 2021 Sep 22–23; Bengkulu, Indonesia. p. 1–7. doi:10.1109/citsm52892.2021.9589027. [Google Scholar] [CrossRef]
22. Ahmad F, Alam MS, Shariff SM, Krishnamurthy M. A cost-efficient approach to EV charging station integrated community microgrid: a case study of Indian power market. IEEE Trans Transp Electrif. 2019;5(1):200–14. doi:10.1109/TTE.2019.2893766. [Google Scholar] [CrossRef]
23. Ravichandran A, Sirouspour S, Malysz P, Emadi A. A chance-constraints-based control strategy for microgrids with energy storage and integrated electric vehicles. IEEE Trans Smart Grid. 2018;9(1):346–59. doi:10.1109/TSG.2016.2552173. [Google Scholar] [CrossRef]
24. Das HS, Rahman MM, Li S, Tan CW. Electric vehicles standards, charging infrastructure, and impact on grid integration: a technological review. Renew Sustain Energy Rev. 2020;120(3):109618. doi:10.1016/j.rser.2019.109618. [Google Scholar] [CrossRef]
25. Rubino L, Capasso C, Veneri O. Review on plug-in electric vehicle charging architectures integrated with distributed energy sources for sustainable mobility. Appl Energy. 2017;207(1):438–64. doi:10.1016/j.apenergy.2017.06.097. [Google Scholar] [CrossRef]
26. Kavousi-Fard A, Khodaei A. Efficient integration of plug-in electric vehicles via reconfigurable microgrids. Energy. 2016;111(3):653–63. doi:10.1016/j.energy.2016.06.018. [Google Scholar] [CrossRef]
27. Lu X, Zhou K, Yang S. Multi-objective optimal dispatch of microgrid containing electric vehicles. J Clean Prod. 2017;165(3):1572–81. doi:10.1016/j.jclepro.2017.07.221. [Google Scholar] [CrossRef]
28. Kanakadhurga D, Prabaharan N. Demand side management in microgrid: a critical review of key issues and recent trends. Renew Sustain Energy Rev. 2022;156(3):111915. doi:10.1016/j.rser.2021.111915. [Google Scholar] [CrossRef]
29. Aljohani TM, Ebrahim AF, Mohammed O. Hybrid microgrid energy management and control based on metaheuristic-driven vector-decoupled algorithm considering intermittent renewable sources and electric vehicles charging lot. Energies. 2020;13(13):3423. doi:10.3390/en13133423. [Google Scholar] [CrossRef]
30. Rabie A, Ghanem A, Kaddah SS, El-Saadawi MM. Electric vehicles based electric power grid support: a review. Int J Power Electron Drive Syst. 2023;14(1):589. doi:10.11591/ijpeds.v14.i1.pp589-605. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools