
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Improved RRT∗ Algorithm for Automatic Charging Robot Obstacle Avoidance Path Planning in Complex Environments
1
College of Mechanical and Electrical Engineering, Qingdao University, Qingdao, 266071, China
2
School of Arts and Sciences, University of Pennsylvania, Philadelphia, PA 19104, USA
3
National Engineering Research Center for Intelligent Electrical Vehicle Power System, Qingdao University, Qingdao,
266071, China
* Corresponding Author: Qinghai Zhao. Email:
(This article belongs to the Special Issue: Machine Learning-Guided Intelligent Modeling with Its Industrial Applications)
Computer Modeling in Engineering & Sciences 2023, 137(3), 2567-2591. https://doi.org/10.32604/cmes.2023.029152
Received 03 February 2023; Accepted 23 March 2023; Issue published 03 August 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
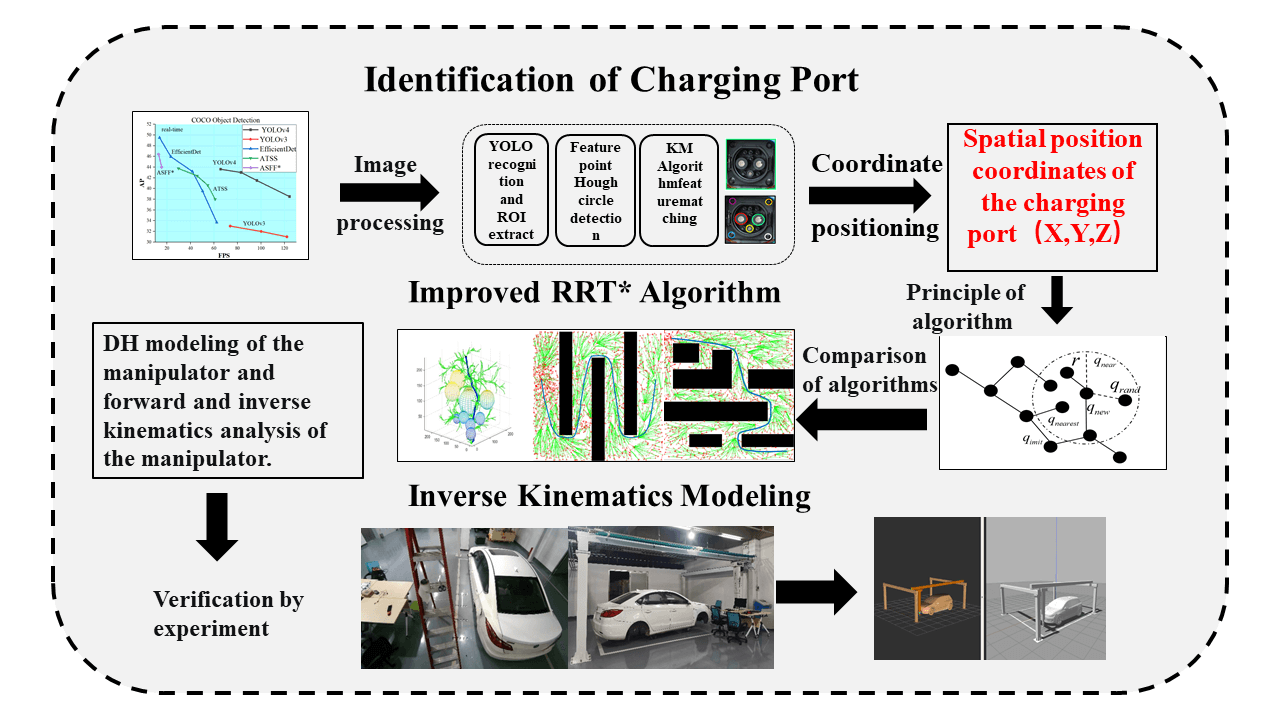
A new and improved RRT∗ algorithm has been developed to address the low efficiency of obstacle avoidance planning and long path distances in the electric vehicle automatic charging robot arm. This algorithm enables the robot to avoid obstacles, find the optimal path, and complete automatic charging docking. It maintains the global completeness and path optimality of the RRT algorithm while also improving the iteration speed and quality of generated paths in both 2D and 3D path planning. After finding the optimal path, the B-sample curve is used to optimize the rough path to create a smoother and more optimal path. In comparison experiments, the new algorithm yielded reductions of 35.5%, 29.2%, and 11.7% in search time and 22.8%, 19.2%, and 9% in path length for the 3D environment. Finally, experimental validation of the automatic charging of electric vehicles was conducted to further verify the effectiveness of the algorithm. The simulation experimental validation was carried out by kinematic modeling and building an experimental platform. The error between the experimental results and the simulation results is within 10%. The experimental results show the effectiveness and practicality of the algorithm.Graphic Abstract
Keywords
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools