
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

Wireless Positioning: Technologies, Applications, Challenges, and Future Development Trends
1 School of Physics and Electronic Information Engineering, University of Henan Polytechnic, Jiaozuo, 454000, China
2 Jiaozuo Key Laboratory of Crow-Sensing Network, Jiaozuo, 454000, China
3 Institute of Mining Engineering, Guizhou Institute of Technology, Guiyang, 550003, China
4 Coal Supervision Department, Panzhou Energy Bureau, Panzhou, 553599, China
* Corresponding Author: Geng Li. Email:
Computer Modeling in Engineering & Sciences 2024, 139(2), 1135-1166. https://doi.org/10.32604/cmes.2023.031534
Received 29 June 2023; Accepted 01 September 2023; Issue published 29 January 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The development of the fifth-generation (5G) mobile communication systems has entered the commercialization stage. 5G has a high data rate, low latency, and high reliability that can meet the basic demands of most industries and daily life, such as the Internet of Things (IoT), intelligent transportation systems, positioning, and navigation. The continuous progress and development of society have aroused wide concern. Positioning accuracy is the core demand for the applications, especially in complex environments such as airports, warehouses, supermarkets, and basements. However, many factors also affect the accuracy of positioning in those environments, for example, multipath effects, non-line-of-sight, and clock synchronization errors. This paper provides a comprehensive review of the existing works about positioning for the future wireless network and discusses its key techniques and algorithms, as well as the current development and future directions. We first outline the current traditional positioning technologies and algorithms, which are discussed and analyzed with the relevant literature. In addition, we also discuss application scenarios for wireless localization. By comparing different positioning systems, the challenges and future development directions of existing wireless positioning systems are prospected.Keywords
Abbreviations
| 5G | Fifth-generation |
| AoA | Angle of arrival |
| AMBC | Ambient backscatter communication |
| ANN | Artificial neural network |
| CNN | Convolutional neural network |
| DNN | Deep neural network |
| EKF | Extended kalman filter |
| EMEA | Enhanced mind evolution algorithm |
| FNN | Fuzzy neural network |
| IoV | Internet of vehicles |
| GPS | Global positioning system |
| KF | Kalman filter |
| LoS | Line-of-sight |
| MUSIC | Multiple signal classification |
| MIMO | Multiple input multiple output |
| NLoS | Non-line-of-sight |
| RNN | Recurrent neural network |
| RFVS | Random forest variable selection |
| RSSI | Received signal strength indication |
| RIS | Reconfigurable intelligent surface |
| ToA | Time of arrival |
| TDoA | Time difference of arrival |
| UWB | Ultra wide band |
| VLC | Visible light communication |
| VLP | Visible light positioning |
| WIFI | Wireless fidelity |
| WKNN | Weighted k-nearest neighbor |
| WDMA | Wavelength division multiple access |
With the wide applications of the fifth generation (5G)-driven Internet of Things (IoT) and mobile Internet services, positioning services play indispensable roles in our daily work and life. For some application scenarios, positioning accuracy is a critical issue in determining the success or failure of positioning systems; such as in natural disasters, the accuracy of positioning trapped individuals is critical for effective and efficient rescue operations. Recently, the development of 5G mobile communication systems has entered the commercial stage and provided promising methods to improve positioning accuracy, such as multi-antenna, device-to-device, and other core technologies [1–3]. 5G has continuous wide-area coverage, high hotspot capacity, low latency and power consumption, high reliability, and connectivity, meeting the demands for positioning scenarios [4,5]. In the sixth generation (6G) mobile communication systems, millimeter wave, terahertz wave, and reconfigurable intelligent surfaces (RIS) are the core technologies that can provide high-precision and wide-coverage positioning services for the IOT systems. Among them, Millimeter waves and terahertz waves have the characteristics of large bandwidth, which can support higher data transmission rates. RIS positioning technology has the advantages of high positioning accuracy, strong flexibility, low cost, and low energy consumption. It is considered one of the core technologies for indoor positioning, outdoor navigation, and intelligent transportation [6].
Wireless positioning can be applied in many areas, such as medicine, industry, public safety, logistics, transportation systems, etc. In general, positioning applications can be classified into the following categories: indoor environment, mine, sea, underground parking, supermarkets, etc., as shown in Fig. 1. On the other hand, positioning accuracy faces many problems in complex geographical environments, where the signals are blocked due to obstacles, reducing the positioning accuracy. In indoor environments, the indoor propagation conditions are very complex, resulting in non-line-of-sight (NLoS) propagations. Meanwhile, the real-time and accuracy of the worker positioning are critical due to many accidents incurred by the complex underground environments.
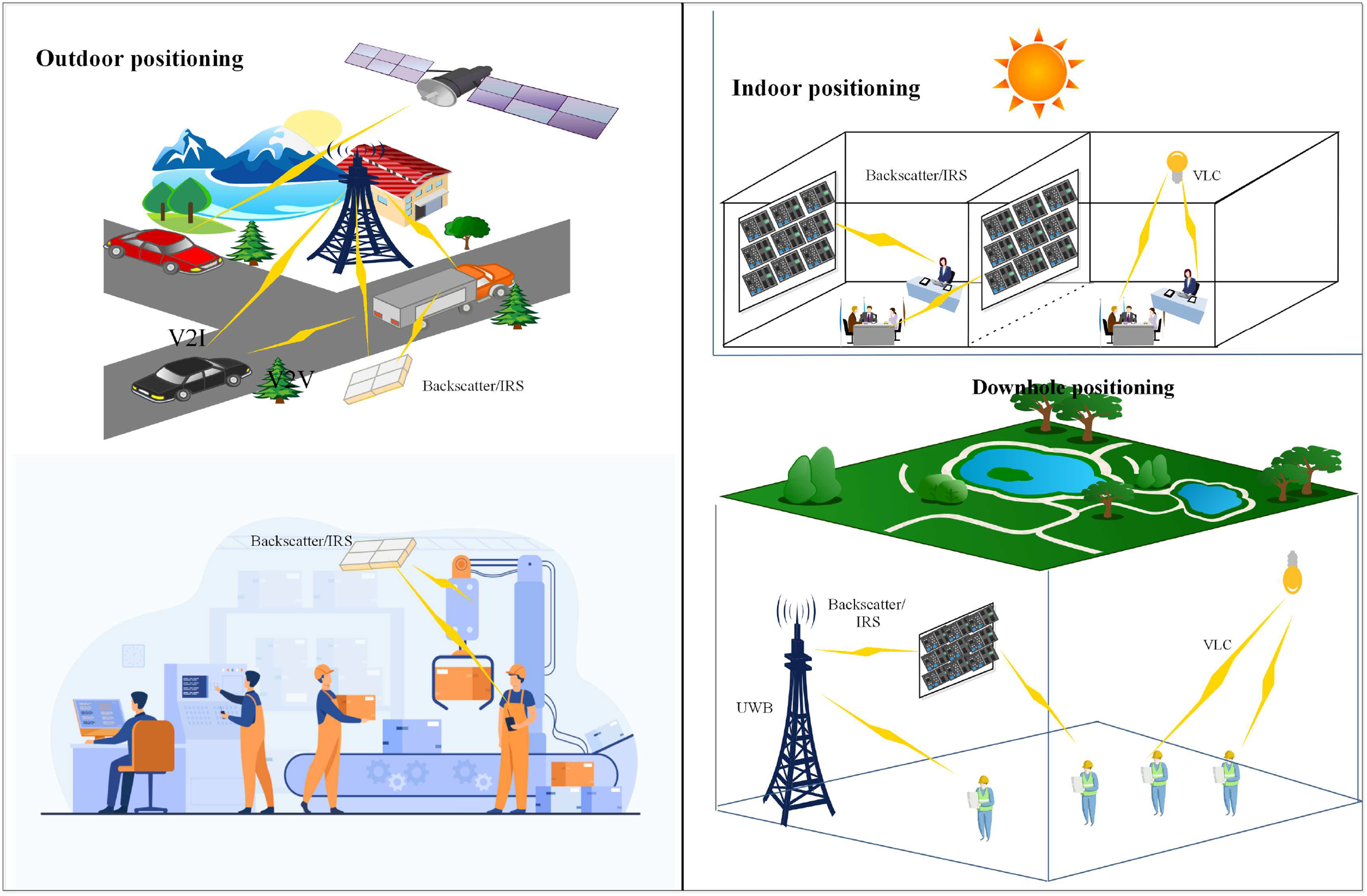
Figure 1: System model
Typical wireless positioning technologies include wireless fidelity (WIFI) positioning, radio frequency identification (RFID) positioning, Zig-Bee positioning, Bluetooth positioning, and ultra wide band (UWB) positioning. Typical positioning algorithms can be divided into ranging-based positioning and non-ranging-based positioning. The ranging positioning algorithms include time of arrival (ToA), time difference of arrival (TDoA), and angle of arrival (AoA), while the non-ranging-based positioning algorithms include the centralization and fingerprint matching methods. The ranging-based positioning algorithms obtain distance from the target to the base station anchor point by measuring the signal flight time and angle information, while non-ranging-based positioning algorithms achieve the localization by the fingerprint matching without the distance between two points, where signals and images form the location fingerprint. Unfortunately, building a fingerprint library for fingerprint matching takes a long time, and the matching mode can affect the positioning accuracy.
Motivated by the above, this paper compares positioning technologies and algorithms to better understand each positioning technology’s advantages and disadvantages. Moreover, we discuss the current research challenges of wireless localization and highlight its future directions and application scenarios. In brief, the contribution of this paper can be summarized below:
• We comprehensively discussed the existing wireless localization technologies and the relevant research and introduced their localization principles.
• We discussed and summarized the localization algorithms, of which the applicabilities are based on their fundamental principles.
• We introduced the application scenarios of wireless positioning: the Internet of Vehicles (IoV), smart hospital, smart logistics, and other future application scenarios.
• Finally, we identified several important research challenges and discussed future development trends.
The organization of this paper is shown in Fig. 2. Section 2 discusses the current and traditional positioning technology and provides the advantages and disadvantages of each positioning technology. Section 3 elaborates on the typical and recent popular positioning algorithms and expounds them with the literature. Finally, Section 4 describes the future positioning scenarios and emerging technologies, such as IoV, smart hospital, smart logistics, intelligent reflecting surface (IRS), and backscatter.
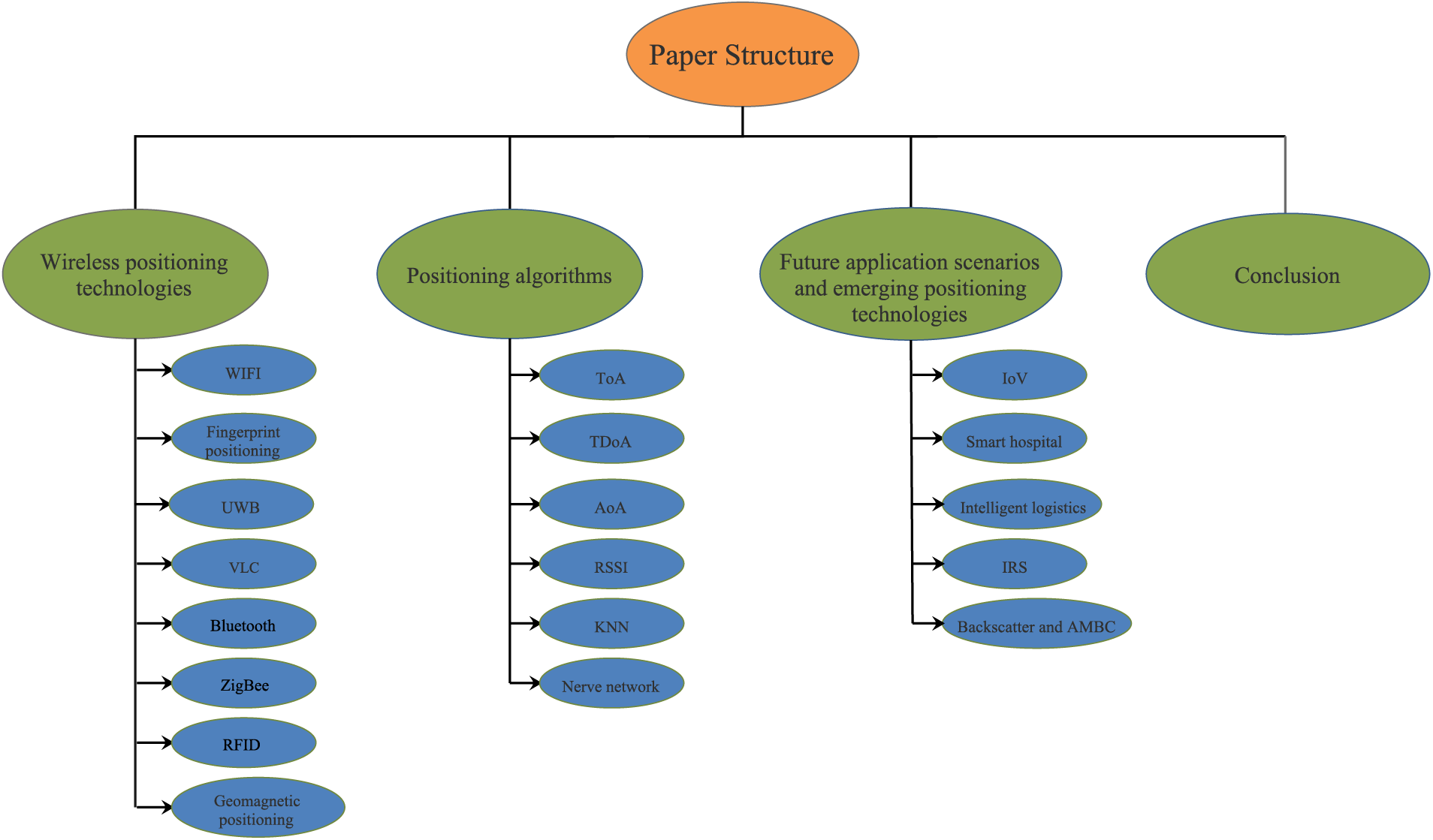
Figure 2: Organization of this article
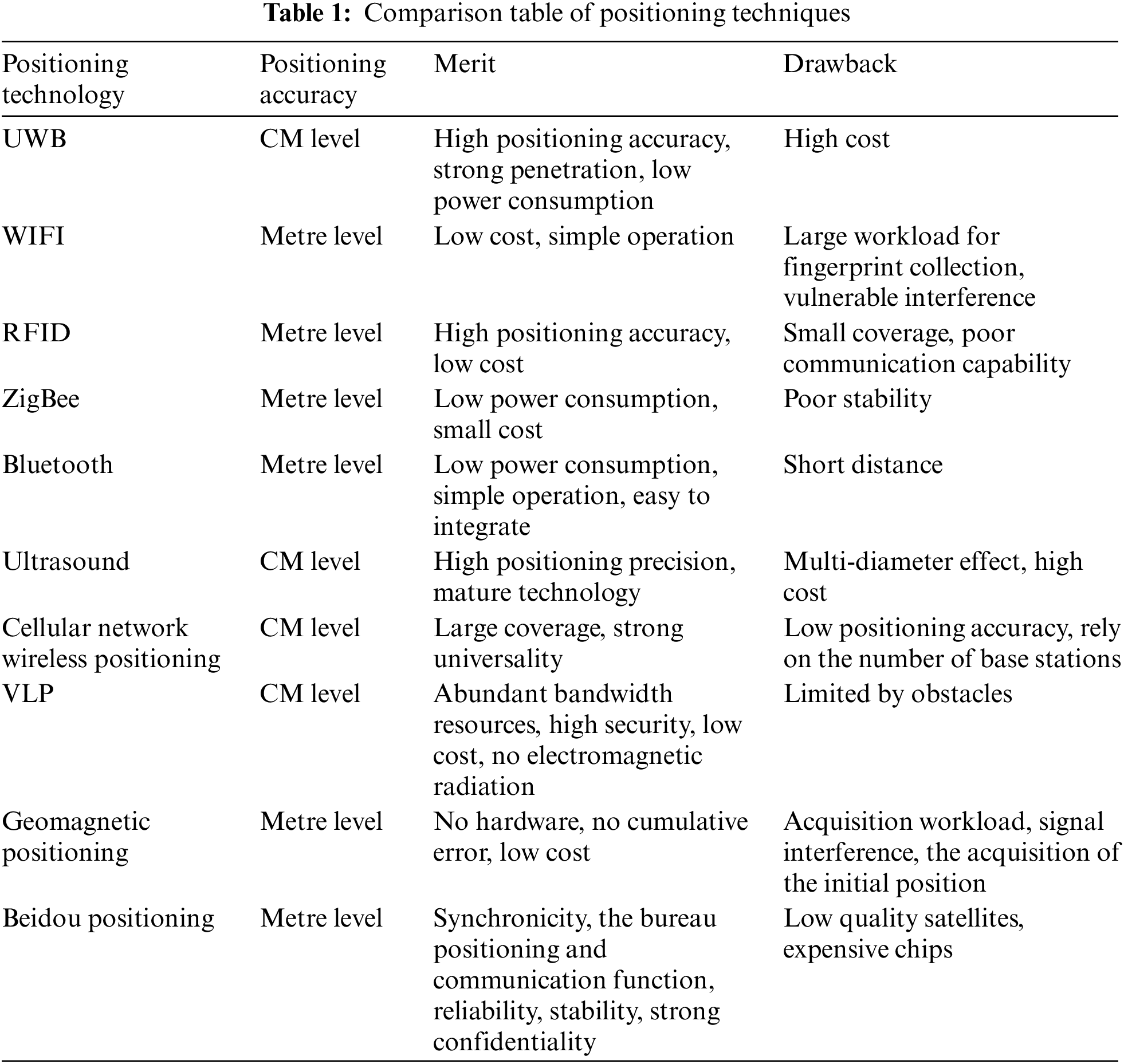
The positioning technology can be realized through various wireless communication technologies, such as the commonly used WIFI positioning, fingerprint positioning, UWB positioning, visible light positioning (VLP), ZigBee positioning, RFID positioning, and geomagnetic positioning. For most positioning technologies, some extra equipment is used to assist in determining the location information of the terminal, resulting in the differences between positioning technologies. Therefore, Table 1 overviews the accuracy, advantages, and disadvantages of different wireless positioning technologies.
Thanks to the continuous development of wireless networks, full coverage of indoor WIFI signals has led to the attention and development of WIFI positioning.
The WIFI positioning offers simple operation and low cost, but its positioning accuracy is easily affected by the NLoS and the multipath. Sun et al. [7] investigated a WIFI fine time measurement (FTM) positioning algorithm with the aid of geomagnetic positioning. They designed an enhanced mind evolution algorithm (EMEA) for positioning accuracy in NLoS environments. To this end, an access point selection algorithm based on multi-objective optimization was put forward in [8], where the optimal solution can be achieved by machine learning. In [9], a WIFI-based localization technique that could improve the accuracy of the ToA estimation was studied to assist in the estimation by sending multiple identical predefined messages. Pei et al. [10] introduced the interference of positioning for WIFI positioning in the environments of coexistence of the WIFI and Bluetooth, ameliorating the WIFI positioning accuracy. In [11], WIFI fingerprints were generated by the logarithmic distance path loss model, which could reduce the indoor positioning error.
2.2 Fingerprint Positioning Technology
The fingerprint localization technology is based on fingerprint pattern recognition, which uses multiple sensors or fixed nodes to collect the fingerprint information of the target device and determines the location of the device by matching it with the pre-established fingerprint database. It is built by the spatial differences and characteristics of wireless signals (or other environmental characteristics) in different environments. Thus, the precision of fingerprint matching depends on the density of the reference points in the positioning areas. In contrast, WIFI positioning, UWB positioning, VLP, ZigBee positioning, and RFID positioning are based on the characteristics of wireless signals, which are based on propagation characteristics of wireless signals, such as signal strength, time delay, optical signals to determine the location of the devices.
Wireless local area networks (WLAN) have become ubiquitous, upon which the WIFI fingerprinting technology has become a relatively developed technology in the future. In particular, it has advantages such as low cost, high accuracy, and wide applicability without measuring distances between Access Points (APs), suitable for complex environments.
WIFI fingerprint positioning is done in two stages: offline and online. In the offline stage, the localization area is divided into multiple grid points; the received signal intensity of WIFI signals at different known reference access points is collected through the established grid points, represented by their respective fingerprints. In the online stage, position estimation can be achieved by the closest reference point, which is obtained by measuring the received signal strength indication (RSSI) value of the user’s position and comparing the RSSI value with the fingerprint in the database [12]. Fingerprint matching is the key step in WIFI fingerprint localization, which compares and matches WIFI fingerprint data collected in real-time with a pre-constructed fingerprint database. During the fingerprint matching stage, the most similar or matching fingerprint information can be identified by comparing the RSSI of WIFI signals with the fingerprint data stored in the database. The efficiency and accuracy of fingerprint localization can be improved by using this centralization method [13].
In [14], the WIFI fingerprinting method was initially proposed based on signal similarity and spatial location. The authors explored the relationship between RSSI similarity and the difference in signal propagation distance and introduced an approximate position distance to enhance the positioning accuracy of the weighted k-nearest neighbors (WKNN) algorithm. In [15], a WIFI indoor positioning optimization method based on a location fingerprint algorithm was studied, revealing that the localization error reduces as the number of APs increases, and the algorithm can effectively optimize WIFI indoor positioning. The authors of [16] proposed a WKNN algorithm based on signal similarity and spatial location, first analyzed the relationship between RSSI similarity and signal propagation distance difference, and designed the approximate position distance to improve the WKNN algorithm positioning accuracy. For RSSI instability, Ji et al. [17] studied a random forest variable selection (RFVS) multivariable fingerprint, established the database by ten distance and power relationship variables, and sorted variable importance and combinations by RFVS. In [18], a fingerprint positioning method based on a virtual antenna array and multipath AoA delay fingerprint was investigated to decrease the influence of multipath effects on positioning accuracy. Zheng et al. [19] considered a new magnetic base positioning system for fingerprint and confidence evaluation for complex environments and inaccurate indoor positioning, which ensured the penetration and reduced the interference of multipath error, solving the sparse fingerprint. The authors in [20] used a convolutional neural network (CNN) to realize exact and non-directional direction systems, which convert WIFI and magnetic field signals into fingerprint images and self-directed learning of the mapping between real position and fingerprint images, achieving the non-directional orientation and significantly improving the accuracy.
2.3 Ultra Wide Band Positioning
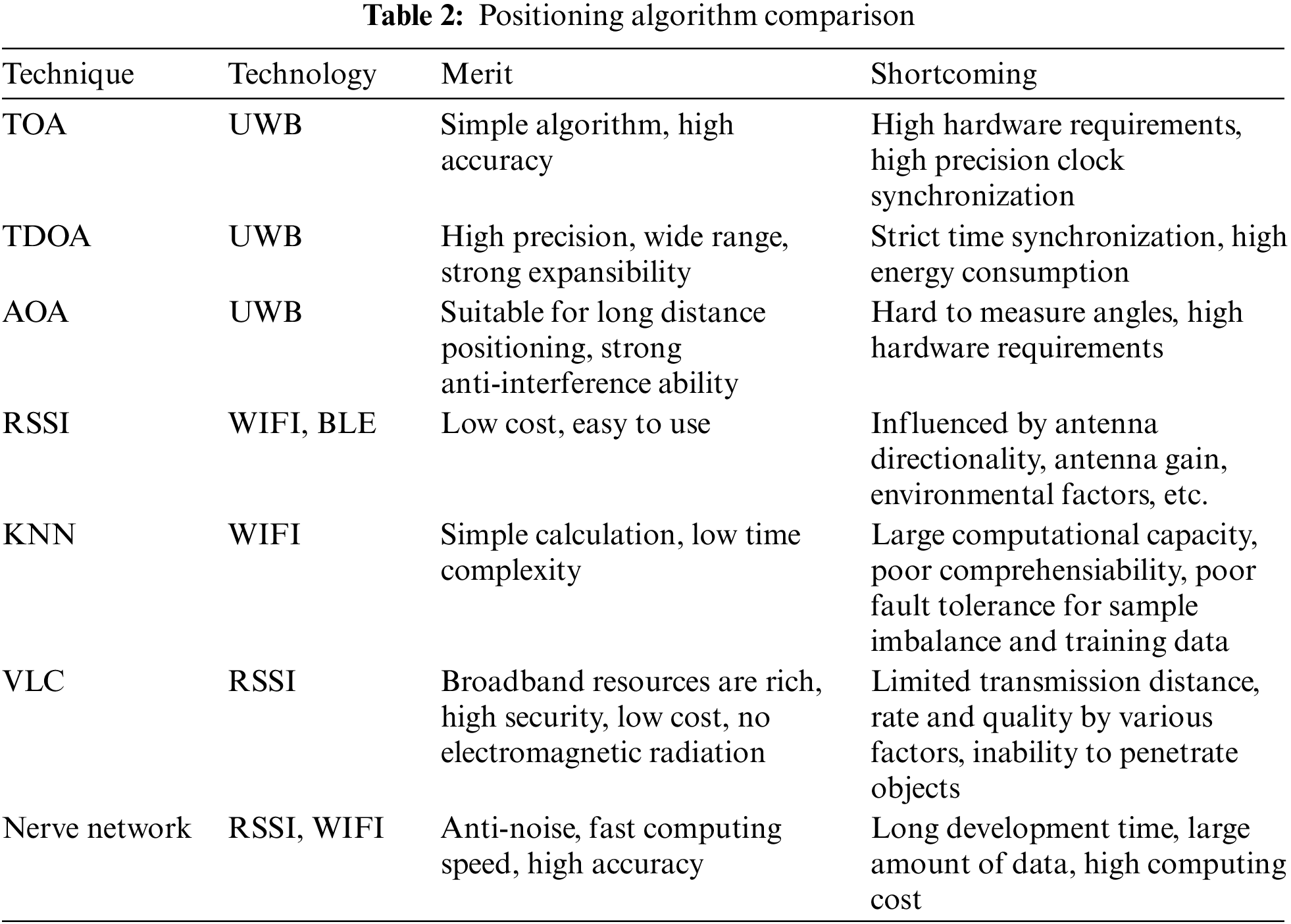
UWB is a short-range communication technology with the advantages of high precision, strong penetration, high security, and low power consumption [21,22]. The UWB positioning model is shown in Fig. 3.
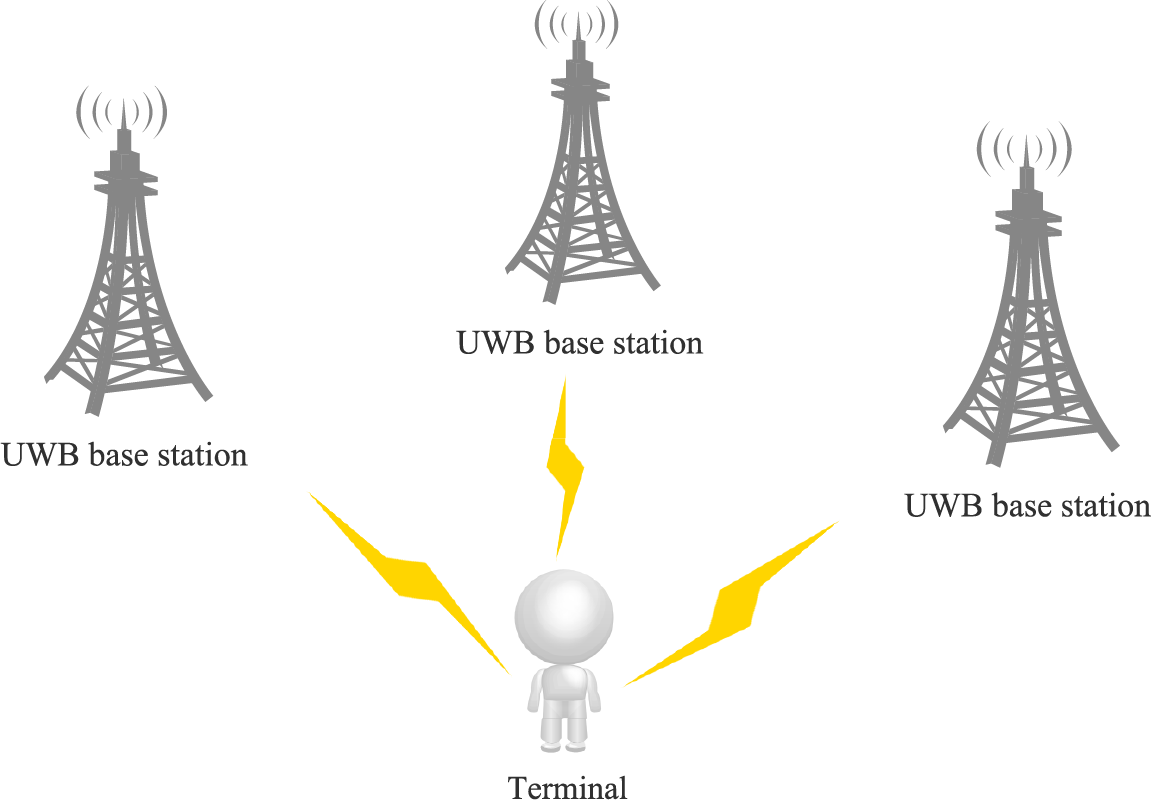
Figure 3: The UWB positioning model
Given the multipath effect and NLoS in complex environments, an indoor positioning scheme based on wavelength division multiple access (WDMA)-UWB was investigated for multiuser UWB positioning applications [23], where the entropy-based method and the transfer learning method were used to estimate ToA and reduce the ranging error in NLoS. UWB-based positioning technology that can achieve fast and accurate positioning is subjected to adequate infrastructure and clear line-of-sight (LoS), limiting its business application. Therefore, the researchers focused on using other techniques to mitigate those limitations. In [24], a mixing positioning system that combined UWB and pedestrian dead reckoning (PDR) was studied to alleviate infrastructure and error drift constraints, indicating that the positioning performance was significantly enhanced. The authors of [25] studied an NLoS error compensation method to ameliorate accuracy in indoor positioning system-based UWB, where the coordinate set was smoothed by Kalman Filter (KF). In [26], the NLoS error and multipath effect in the underground positioning system were reduced by the KF algorithm. Because the positioning of robotic mining equipment restricted the application in the coal mining industry, the authors in [27] discussed a UWB anchor optimal deployment strategy, which can maintain realistic positioning accuracy for coal mine robots. For improving positioning accuracy in a coal mine roadway, the extended KF-based UWB positioning model was studied in [28], verifying that the considered system could achieve decimeter-level accuracy. To address UWB’s limited range issue caused by fixed anchors, in [29], the position of multiple unmanned aerial vehicles (UAVs) equipped with UWB anchors to collect the precise positions can be changed in real-time according to user requirements.
Compared with visible light communication (VLC) technology and traditional communication technology, the VLC with LED as the carrier is less affected by multipath effect and electromagnetic waves; thus, it is more applicable in limited radio communication environments such as hospitals, shopping malls, and mines, especially indoor positioning [30]. VLP technology offers the advantages of high accuracy, low cost, and traceability. Fig. 4 shows the scenarios of the visible light indoor positioning.

Figure 4: Visible light localization model
The authors in [31] discussed the advantages and disadvantages of the four main indoor positioning methods based on VLC, including scene analysis, proximity, image positioning, and the triangulation of the RSSI method, which indicated small indoor environments with fewer obstacles and weak diffuse in the literature is impractical. The problems posed by many obstacles and strong diffuse in complex environments were discussed [32–34]. Unlike the receiver deployed on the mine tunnel ground, Pang et al. [32] deployed photodiodes (PDs) as receivers on the ceiling of the mine tunnel, which can resolve unstable and unreliable light signal transmission caused by receivers being trampled and shrouded. When the large-scale deployment of base stations constructed by PDs is limited, inertial navigation can assist in real-time positioning. In [33], the positioning performance of a deep learning-based fusion system combined with an inertial measurement unit (IMU) and VLP under poor LoS environments was enhanced by selecting a structured neural network. In [34], the position estimation deep neural network (PE-DNN) aided module was added to the VLP system for high compatibility and low complexity, where the position and information transmission can be provided by only one LED and one PD. For the accuracy of VLP systems, the authors of [35] globally optimized the positioning accuracy by a nonlinear graph optimization model, which improved the accuracy by 71
Bluetooth positioning has the same principle as WIFI positioning, which can be divided into ranging and fingerprint matching methods. The Bluetooth positioning technology is widely adopted due to its low cost and easy integration, but it is severely interfered with by other signals in the environment. Thus, the signal stability tends to be compromised, leading to a restricted communication range and heightened reliance on the RSSI. The above defects limit its positioning accuracy [38].
To address the adverse effects of the NLoS on Bluetooth location accuracy and robustness in indoor positioning, the authors of [39] considered Bluetooth ranging model combined trilateral measurement and least squares based on Taylor expansion by the RSSI of Bluetooth transmission and the distance of logarithmic attenuation model, where the integrity monitoring alert mechanism reminds users in the position that cannot be accurately located. Maus et al. [40] investigated a phase normalization scheme that can achieve Bluetooth measurements by joint angle and delay estimation multiple signal classification (JADE-MUSIC) algorithms. They studied an applicable JADE-MUSIC AoA estimation approach to solve the indeterministic phase offsets caused by different Bluetooth channels, which can significantly improve its localization accuracy, especially in systems with few antennas and few available channels. Bluetooth-based indoor positioning systems for those who are old, weak, ill, or disabled were proposed in [41], and their daily living patterns can be monitored by multiple sensors installed in different locations, as well as trilateration-based and fingerprinting-based methods. Yang et al. [42] investigated the multiple kernel function for the accuracy analysis of the classification regression algorithm based on the support vector machine and equal weight k-nearest neighbor (EWKNN) algorithm, demonstrating that the latter positioning accuracy is better than the former in complex environments. Kumar et al. [43] considered a phase-based angle measurement method for Bluetooth angle calculation, providing a more accurate positioning while maintaining a distance between the locators in an indoor environment.
The position information of the nodes is calculated by the signal strength or arrival time between the nodes in the ZigBee positioning networks. The ZigBee positioning stands out for its low power consumption and small cost, yet it has poor stability.
The authors in [44] developed a ZigBee-based indoor positioning technology that used the RSSI values of fixed nodes, determined by a 3D three times measurement method, to locate unknown nodes. By combining KF optimization with node RSSI values and optimal results from changing the position of the reader and label, optimal estimation is obtained. In [45], Shangbin et al. designed a coal mine underground safety monitoring system that detects environmental parameters (gas, carbon monoxide, temperature, and humidity) using ZigBee nodes and achieves personnel positioning. The location of people in the mine is determined using a three-sided positioning ranging method, and using KF reduces random error and improves positioning accuracy. In [46], the particle swarm optimization method was proposed to estimate path loss parameters in ZigBee wireless sensor networks, which also can remove the poor experimental data for fitting signal attenuation curves. A modified particle filtering using a ZigBee model was studied in [47] to address the numerous calculations for particle filtering, demonstrating that the algorithm has the advantages of low power consumption, efficient particle number, and estimation error.
2.7 Radio Frequency Identification Positioning
RFID technology, also known as electronic tag, can automatically identify objects and collect relevant data through RF signals, suitable for all harsh environments [48].
The advantages of RFID positioning technology include the low cost of positioning equipment, no additional hardware support and LoS transmission, and the ability to trace the movement trajectory of items, which make it one of the most widespread positioning applications. The authors in [49] considered a dual-channel low-power passive RFID localization system with extremely low radiation power, where a probabilistic algorithm based on measurement jitters was adopted to estimate the target’s location, and localization accuracy can be up to 0.5 m. Yao et al. [50] investigated an indoor positioning system where the position of the RFID reader was estimated by the instantaneous RSSI measurements received from tags. Moreover, for estimating the path loss of the tag reader angle, the iterative compensation from the RSSI measurement was used to improve the performance of the positioning system, whose error was up to 0.1 m. However, low cost and simple hardware structure limit the coverage and signal anti-interference ability, leading to low positioning precision. Tang et al. [51] used the differential evolution algorithm to optimize the RFID positioning accuracy. Firstly, the distance between the tag and the reader was estimated by RSSI values. Then, the closest position coordinates to the label were measured by optimizing the distance error between the label and the tested tag, whose error can reach 0.0012 m. For the low positioning accuracy, a chaotic adaptive genetic algorithm that can improve the convergence accuracy of the algorithm and optimize the jitter was studied in [52], where the noise can be reduced by using Gaussian filtering.
Geomagnetic positioning technology judges the indoor and outdoor location by the geomagnetic difference at various locations. Every position has various geomagnetic properties due to different environmental structures related to the geographical location, such as the total magnetic field, the magnetic bias angle, and so on [53]. It is similar to the WIFI fingerprint technology, which needs to collect the geomagnetic distribution in the room manually. The magnetic field of target locations is unique and can be captured without any transmitters; therefore, the positioning technology has the advantages of high precision and low cost. Furthermore, magnetic sensors are already standard on smartphones and tablets, thus having a wide range of applications.
The disadvantage is that metals and other interfering objects easily affect the magnetic signals, leading to unstable and low-accuracy positioning. Especially when the magnetic field strength is relatively weak, the magnetic resistance sensor is easily interfered with by the other magnetic fields [54]. Qi et al. [55] improved the localization accuracy by matching the magnetic field direction and space angle. To address the geomagnetic field anomalies caused by construction materials in an indoor environment, Shu et al. [56] combined WIFI signals with geomagnetic field signals to improve the positioning accuracy and reduce the workload. Aiming at the limitations of traditional geomagnetic matching, Ji et al. [57] proposed the particle swarm optimization geomagnetic matching algorithm based on simulated annealing, which improved the accuracy and efficiency of navigation. In [58], the multi-parameter magnetic detection (MPMD) algorithm that combined RFID with geomagnetic positioning to locate the underground personnel was introduced to improve the accuracy and anti-noise ability. In [59], the Bayesian filtering algorithm was used to enhance the robustness of the matching algorithm. The wavelet analysis and KF methods were used to improve the matched signal-to-noise ratio of the magnetic field [60]. Given that magnetic field signals cannot always be identified in a specific scene, Bhattarai et al. [61] used a deep recurrent neural network to classify the landmarks of the magnetic field value.
Many existing positioning algorithms exist, such as the arrival of time (ToA), angle of arrival (AoA), and fingerprint positioning. They adopt a classification basis, namely range-based and non-ranging-based methods, typically the tripartite positioning approach and fingerprint localization, respectively. Different from the traditional positioning algorithms, the neural network positioning algorithm as the emerging positioning algorithm is widely used. Table 2 contrasts the different localization algorithms.
3.1 Time of Arrival Ranging Method
ToA ranging method calculates the distance between the two ends by signal transmission time from the transmitter to the receiver. The schematic diagram is shown in Fig. 5, where the base station sends signals to the terminal, the signal transmission time from the base station to the terminal is
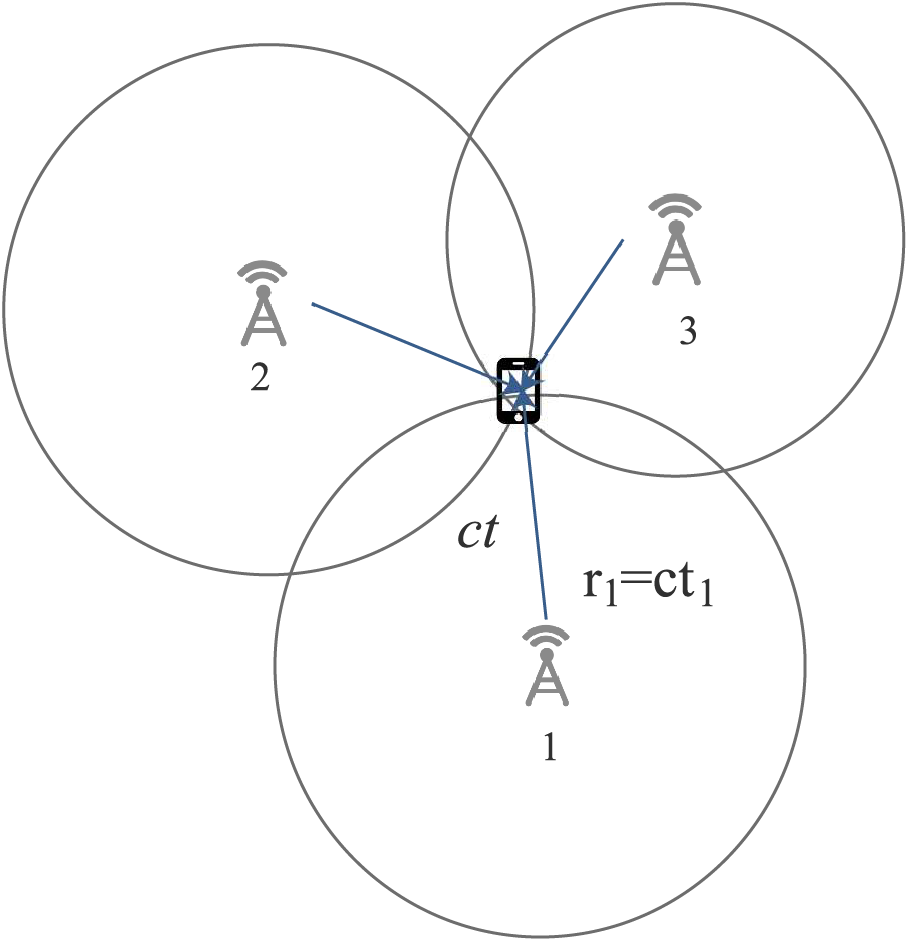
Figure 5: ToA schematic diagram
It is assumed that the coordinate of the receiver is
where
where
and X is the coordinate of the receiver, which can be obtained by the least squares method.
It is noted that the ToA positioning technique has the advantages of high-precision positioning, simple implementation, and strong adaptability to environmental changes. However, it also suffers from drawbacks such as sensitivity to signal propagation delay, the need for high-precision clock synchronization, and dependence on precise timing devices. The direct and the non-direct radiation diameters have been extensively studied in the existing literature. For the ToA-based positioning problem under NLoS conditions, the authors in [62] studied a robust weighted least squares method without the statistics of NLoS errors and path status to alleviate the bad performance for existing robust methods problem, demonstrated that better accuracy can be achieved by the proposed method for the sparse and dense NLoS environments. Yang et al. [63] proposed a UWB-based ToA indoor positioning method that combined the KF and the linearized to reduce the multipath or NLoS effect, improving the positioning accuracy. The fusion ToA/AoA target localization scheme that can achieve better accuracy than any of the ToA and AoA schemes was studied in [64], which can reduce time synchronization requirements and the number of receivers.
3.2 Time Difference of Arrival Ranging Method
The TDoA positioning method relies on the time difference between the transmitter and each receiver. Specifically, the location of the transmitter is determined by the signal transmission time from the transmitter to the receiving terminal. Circles are drawn, with the receiver as the center and the distance from the transmitter to the receiver as the radius. The intersection of the circumferences is the location of the transmitter [65]. The schematic diagram is shown in Fig. 6.
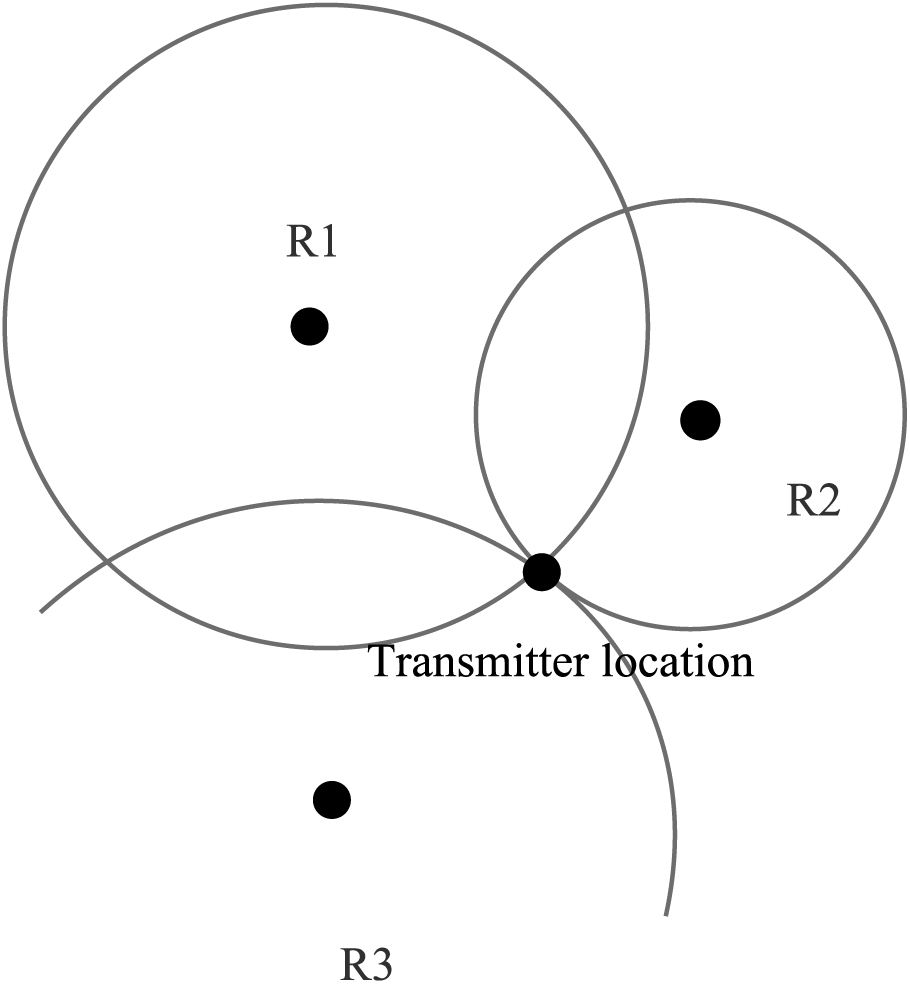
Figure 6: TDoA schematic diagram
It is assumed that the position coordinate of the
where
Eq. (8) can be resolved by various algorithms, such as the generalized cross-correlation (GCC) algorithm.
The TDoA positioning has the advantages of high positioning accuracy, a wide range of distances, and strong scalability. However, the drawbacks of high power consumption, high time synchronization requirement, vulnerability to multipath effect, and noise need to be further ameliorated [66]. The positioning method problem is essentially an optimization problem, and the specific optimization problem varies according to different positioning methods. For example, for satellite-based global positioning systems, the optimization problem is improving positioning accuracy and reliability in different environments. For radio signal-based positioning systems, the optimization problem lies in improving signal strength and reducing interference in different environments. Cao et al. [67] studied a practical indoor target positioning combination weighted (COM-W) method, where the multiple preliminary localization results for three nodes were obtained. Then, they were estimated by the weighted averaging technique based on the Cramer-Rao lower bound, reducing the adverse effects of combinations with poor geometry. In [68], a technique for transforming TDoA models into ToA models and a semidefinite programming method with novel constraints were proposed, which can resolve the convex hull and reference-anchor selection problem without prior information of NLoS links or error statistics, reducing NLoS errors. The authors in [69] considered an iterative constrained weighted least squares method to solve the problems with quadratic programming constrained by indefinite quadratic equalities and coupling of weighting matrix and unknown source position. In [70], the difference-of-convex programming tools that can modify the objective function into convex functions and converge to a stationary point were used to solve the maximum likelihood TDoA localization problem. In [71], a location estimation approach incorporating both TDoA and phase-difference-of-arrival was studied, indicating that the approach had better localization performance than pure TDoA methods.
3.3 Angle of Arrival Ranging Method
The AoA ranging method is that the receiver measures the angle of the incident signal by the antenna or the angle from the base station to the mobile station [72]. As is shown in Fig. 7, the point P is the position of the mobile station, which can be obtained by at least two angles and known points. It is assumed that the position coordinate of the
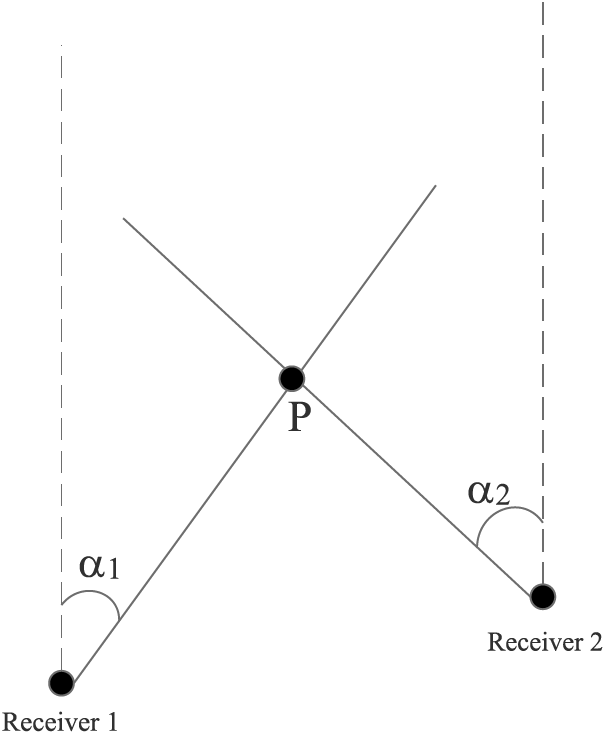
Figure 7: AoA schematic diagram
The matrix form of the above formula can be written as:
The matrix of incident angle can be resolved by singular value decomposition (SVD). This method is a linear algebra technique that can decompose a matrix into the product of three matrices, including a left singular matrix, a diagonal matrix, and a right singular.
The AoA ranging method has strong anti-interference ability, suitable for long-distance positioning. However, it requires high hardware requirements and is greatly affected by blocking. Moreover, positioning results are vulnerable to multiple path effects and environmental changes. In [73], a hybrid ToA/AoA location algorithm was investigated, which has moderate flexibility and fast, steady convergence by combining with the grid-search-based method. Zheng et al. [74] considered a weighting method that can decrease the median localization error, where the weight of each AoA was determined by estimation accuracy. Ying et al. [75] investigated a multi-advanced infrared sounder (AIRS) selective algorithm based on Discrete Fourier Transform (DFT) transformation to study multi-AIRS-assisted AoA positioning under complex terrain conditions, which can select the optimal ARIS positioning target point to improve the positioning accuracy. The ideal solution for the AoA positioning algorithm is the maximum likelihood estimation method, which hinges on the choice of initial points [76,77]. To reduce the complexity of the problems above, Zhu [78] reduced positioning errors by subtracting an estimation based on the least squares method.
3.4 Received Signal Strength Indicator Ranging Method
In RSSI-based location systems, the distance between the sending and receiving points is obtained by the signal strength without other additional hardware requirements; thus, the RSSI ranging is a common method for wireless sensor network positioning. Signal intensity is related to distance, which means signal intensity decreases with increasing distance. Typically, the RSSI is affected by transmission power, path loss, reception gain, and system processing gain. The calculation formula can be expressed as follows:
where
where
where A is the received signal power when the signal is transmitted at 1 m away.
In RSSI-based localization systems, the path loss exponent (PLE) describes the multiple path fading and shadowing conditions of channels, which plays a vital role in positioning accuracy. For more accurate PLE estimation, Golestanian et al. [79] used a multi-distance beacon method to perform localization and PLE estimation, which can accurately estimate PLE even in the presence of deep fading. Aiming at the signal RSSI affected by multipath, Pinto et al. [80] further reduced localization errors by combining boundary considerations, region selection, and estimated location compensation methods based on virtual location. In [81], the authors studied an improved positioning method that combined the RSSI with the location information of training points as an attribute for the clustering step of the K-means clustering algorithm, which was verified in a real scene. In [82], an overlapping multi-state poly-morphing location method was investigated for multiple path loss models, including LoS and NLoS states, which can mitigate performance degradation caused by a single path loss model. In [83], a low-complexity algorithm that can achieve more precise ranging performance by minimizing the distance logarithm error was investigated, which meets the low-complexity requirements of IOT positioning applications. Alsmadi et al. [84] filtered RSSI measurements with KF and estimated the location using beacon weights and an adaptive weighted centroid localization (AWCL) algorithm to reduce positioning error.
3.5 K Nearest Neighbour Method
In KNN-based systems, the principle of proximity is used for classification, and its forefront is to integrate new technologies, such as deep learning, to optimize further and expand the algorithms. The KNN algorithm is a basic classification and regression method with the advantages of being easy to implement, saving training samples and labels without estimating parameters, and unsusceptible to small error probabilities. However, it requires a large amount of sample data, which leads to a large amount of calculation.
Aiming at spatial ambiguity, RSSI instability, and short RSSI acquisition time, in [85], the authors proposed a soft range limited KNNs (SRL-KNNs) positioning fingerprint algorithm, which can achieve better positioning performance by previous location information. Because of the effect of RSSI difference on positioning accuracy, Li et al. [86] investigated a feature scaling KNN algorithm (FS-KNN) algorithm, where the key idea of feature scaling was to assign different weights to the signal differences at different RSSI levels when the similarity between two RSSI vectors was estimated. For the RSSI similarity problem caused by the exponential relationship of RSSI and propagation distance, Zhang et al. [87] studied a novel weighted adaptive KNN algorithm, which selected a variable number of reference points based on the improved RSSI similarity and positional proximity. For the inconsistency of Euclidean distance and distance between RSSI, in [16], the authors considered a weighted KNN (WKNN) algorithm based on the similarity and the space position of signals, where the weighted Euclidean distance was obtained by the difference between RSSI and signal transmission distance, and the user location can be estimated by the APD-WKNN algorithm. The authors in [88] studied the grid-based KNN localization method that not only used low-cost and commericial-off-the-shelf-hardware but also without changing the existing protocols and transmitters, of which results indicated the effectiveness in expanding surveillance coverage and the robustness in noisy environments.
3.6 Neural Network Localization Method
The neural networks are computational models that simulate the structure and function of the human brain, consisting of multiple neurons that can receive input signals and produce output signals. It can be divided into different types according to the different intermediate functional layers, where several main types are fully connected neural networks (FCNN), CNN, RNN, deep neural networks (DNN), and artificial neural networks (ANN). Neural network positioning technology can be divided into RSSI-based localization, ToA-based localization, and WIFI fingerprint-based localization.
The neural network positioning methods with simplicity, adaptation, and high accuracy suit complex environments and have attracted wide attention in recent years [89]. Zhang et al. [90] considered a positioning method based on DNN for variance and unpredictability of wireless signals, where the neural network layers impacted the positioning accuracy and calculation complexity. To address the impact of sharp fluctuation of RSSI and low sampling density on positioning accuracy, in [91], the authors proposed a fingerprint positioning method that combined virtual AP technology with the CNN classification model to improve the positioning accuracy with the low number of samples. In [92], the authors investigated an RNN-assisted trajectory positioning algorithm, considered the correlation among RSSI measurements, and studied a weighted average filter for accuracy among the temporal fluctuations of RSSI, which solved RSSI measurement and reduced localization error. To mitigate the performance degradation of the positioning algorithm, the integrated positioning estimators fusing two general neural networks, including CNN, RNN, and multilayer perceptron, were considered in [93], of which combination coefficients were designed by the errors of the training step of two neural networks. In [94], an indoor localization system that combines a one-dimensional CNN with a Stacked auto-encoder (SAE) was proposed for multi-building and multi-floor localization, where the SAE was used to exact the key features of RSSI data, and the CNN was trained for high accuracy. In [95], two CNN methods based on NLoS channel classification and ranging error regression models were investigated to address localization errors caused by NLoS. The lack of selection standards for reference points significantly affects position accuracy. The authors of [96] investigated a Jenks natural breaks algorithm for adaptively choosing more reasonable reference points. Wang et al. [97] studied a stochastic average gradient back-propagation (SAGA-BP) neural network indoor positioning algorithm, which optimized the initial weights and threshold of the neural network algorithm for efficiency.
4 Future Application Scenarios and Emerging Positioning Technologies
Intelligentialize is another breakthrough in the world’s scientific and technological revolution after industrialization, electrification, and informatization. The proposal of smart cities makes the cities become an ecosystem, where the subsystems constitute the people, commerce, communications, natural resources, etc. These subsystems form a universal connection, mutual promotion, and mutual influence of the whole, among which the wireless positioning technology is a core technology in the construction of smart cities. Therefore, we introduce several mainstream applications of wireless positioning technology in smart cities.
From the “Internet” to the “IOT,” the world is connected differently. From “Vehicle information” to “IoV,” cars are also connected. Fig. 8 shows the scenarios of the IoV. The IoV is the specific application of the IoT in urban transportation, which is achieved through the collection, distribution, and data processing of dynamic networks between vehicles. Through wireless communication between cars, information can be exchanged between vehicles and buildings. The IoV lays the foundation for smart transportation and brings the gospel to the transportation system, for example, the efficiency of cost and time, the reduction of traffic jams and life-threatening risks, and the promotion of the progress of smart cities. However, the IoV also faces many challenges, such as vehicle positioning accuracy, location privacy, and location verification, which need to be constantly improved and solved to apply the IoV [98–100]. This section summarizes and analyzes the vehicle positioning problems in the IoV. In the vehicle communication environments, the vehicle real-time location is particularly important because accuracy requirements are much higher than the Global Positioning System (GPS) provides [101]. In addition, there are the following problems: vehicle communication positioning precision accuracy requirements are 50 cm, GPS signals severely drop and even fail caused by vehicle speed, and so on [102–104].

Figure 8: Scene map of IoV
To cope with GPS errors in urban environments, Chen et al. [105] designed an infrastructure-free framework that allowed vehicles equipped with image sensors to monitor their real-time location. In [106], the authors studied a routing algorithm for vehicle prediction (RAVP), which can more accurately predict the movement trajectory of the vehicle. Given the low GPS positioning accuracy, Song et al. [107] used the DNN algorithm to correct the vehicle position and reduce the GPS positioning error by the vehicle positioning error model. For the short-distance vehicle communication, in [108], the authors established a triangulation-based vehicle positioning method using the infrared signal direction, which a signal direction discriminator judged.
By building a regional medical information platform for health records, the smart hospital uses advanced IOT technologies to realize the interaction between patients and medical staff, medical institutions, and medical equipment for medical informatization. The wireless positioning is mainly used as follows:
(1) Mother and child positioning systems
The real-time positioning systems of mother and child management can solve the mother and child matching, upon which baby anti-theft can realize the safety guarantee. For example, mother-child pairing: wearing wristbands on the wrists of newborns and mothers. Hospital administrators entered the baby’s information on the label when the mother was admitted. When the baby was born, the medical staff read the label information in real-time, successfully comparing the baby and the mother.
(2) Special group management
Special patient groups include people with mental health conditions, disabled patients, sudden illness patients, and child patients. The hospital wears electronic labels for the patients. The real-time location information of the patients on the back-end positioning server can be viewed to determine the safety of the patients.
(3) Equipment and automated drug management
The medical equipment is labeled with electronic tags, found on the back-end server, and immediately displays the real-time storage location on the interface. The trigger can be placed where the drugs enter and leave the warehouse. When the drugs enter the warehouse as a box, the system automatically reads the data and records the storage. When the drugs leave the warehouse, the drugs will be recorded and subtracted from the inventory, reducing the risk of manual typing. At the same time, the flow direction of valuable drugs can be monitored in real-time.
Wireless positioning technology can realize an efficient WLAN real-time positioning system for logistics service providers, which can form a global industry management network and realize the identification and tracking of cross-regions and cross-borders of goods, improving the automatic processing of each link of logistics activities (increasing logistics efficiency and accuracy and reducing logistics costs). Fig. 9 shows the scenarios of the intelligent logistics. In addition, manual intervention in the tracking process can be avoided, saving many human and material resources and improving work efficiency. The logistics management systems integrated with the wireless positioning technology will significantly improve the operation efficiency and operation level of the logistics industry, which have a huge role in promoting the logistics industry. From the current domestic and foreign situation, the main applications are as follows:

Figure 9: Intelligent logistics
(1) Warehouse management: Pallets, containers and other items are affixed with positioning labels, and their locations can be determined on the electronic map at any time;
(2) Yard management: The trailer is affixed with a positioning label for the accurate matching of the trailer and positioning label at any time;
(3) Transportation monitoring: The sensor connected to the positioning label can monitor the state of the goods during transportation in real time and set the alarm function. Positioning tags can also connect to GPS and mobile communication systems for vehicles and cargo positioning and transmitted data upload.
5 Emerging Positioning Technologies
5.1 Reconfigurable Intelligent Surface
Reconfigurable intelligent surface (RIS), also known as metasurface or intelligent reflective surface, is a core technology of the 6G mobile communication, which can improve the quality and range of communication and enhance the wireless positioning effect [109–111]. Besides, RIS also has the advantages of low cost and easy deployment, which can be deployed on the surfaces of stationary or moving objects [112–115]. The RIS has been applied in various fields as an emerging technology, for example, communication networks [116,117] and positioning systems [118–124]. In [118], the positioning and orientation mean square errors of the RIS-assisted millimeter wave positioning systems were evaluated, indicating that the studied adaptive phase shifter design scheme performs better than random phase and exhaustive search schemes. In [119], a closed-form RIS phase profile suitable for joint communication and positioning was investigated, and numerical results were performed to assess the localization and orientation performance of the proposed synchronous and asynchronous signal schemes for various RIS phase designs. The authors of [120] considered a RIS-assisted multiuser passive localization scenario, where RIS was installed on each user to resolve the synchronization problem and lack of data association between multi-static measurements and users. To solve the problem of similar RSSI values at adjacent locations in RSSI-based indoor positioning, Zhang et al. [121] designed the phase shift optimization algorithm for RIS-assisted multiuser positioning. Rinchi et al. [122] studied a RIS-assisted localization algorithm that solved the model mismatch in near-field localization. In [123], the accuracy performance of ToA-based and AoA-based positioning schemes in RIS-assisted UWB positioning systems was investigated, demonstrating that ToA-based positioning has a better effect when the number of receive is limited.
In millimeter wave systems, high time resolution can be achieved due to large bandwidth, and high spatial resolution can be considered in the angular domain by using a large antenna array with an extremely narrow beam [125–127]. Therefore, millimeter waves and massive systems were widely studied in signal localization [128–130]. In [128], the beam training designs of the RIS-assisted millimeter wave communication were proposed to estimate the optimal reflection patterns for RISs, the optimal beams, and link blockage, which can resolve the link blockage. For the nonconvex and nonconcave minimax in the RIS-assisted millimeter wave communication, Gao et al. [129] studied a joint array gain and path loss search algorithm to obtain the worst position, which the convex difference algorithm optimized. Ma et al. [130] established a distributed RIS-assisted indoor positioning model, where RIS was used to improve signal strength, reduce interference, and enhance positioning performance.
5.2 Backscatter and Ambient Backscatter Communication
There are many new backscattering technologies, such as double static backscattering, full duplex backscattering, inter-technical backscattering, long-range backscatter, large intelligent surface (LIS) assisted backscattering, piezo-acoustic backscattering, and network scattering [131–138]. In [131], the authors proposed a bistatic scatter radio system, which can be utilized to build large scale low-cost and low-power backscatter sensor networks with extended field coverage. In [132], the authors proposed a inter-technology backscatter, a novel approach that transforms wireless transmissions from one technology to another, on the air. Zhao et al. [135] considered an LIS-aided backscatter system to support high-reliable communications for IOT applications. In [136], the authors proposed a piezo-acoustic backscatter (PAB), the first technology that enables backscatter networking in underwater environments. With the popularization of backscatter technology, backscatter technology is closely connected with the IOT and provides advanced technology for smart cities and smart homes [139]. Ambient backscatter communication (AMBC) technology has the advantages of low power consumption, long life, low cost, environmental protection, energy saving, and strong leap ability; therefore, AMBC has been widely used, which is one of the cores of the loT, highlighting its importance [140,141]. In AMBC networks, the electromagnetic wave signal in the environment is an excitation source to transmit information without a specific RF source [142,143]. Zhang et al. [144] investigated a backscatter positioning system with a robot equipped with IMU, where the backscattered WIFI signals and the measurements of inertial sensors were received to estimate the location of the robot and the tags simultaneously. In [145], the authors studied a wireless positioning system based on the backscatter phase difference, with an average positioning accuracy of 12.8 cm. In [146], the phase information of the backscatter signal was used to improve positioning accuracy. Lazaro et al. [147] studied an indoor positioning system with room-level accuracy, where a long-range backscattering device was designed to determine the device position by comparing the received signal intensity. Wang et al. [148] considered an active backscattering two-dimensional positioning system with innovative super-resolution time-domain post-processing technology, where the algorithm based on subspace decomposition has higher degrees of freedom and noise reduction benefits.
6 Conclusion and Future Trends
Wireless positioning technology is the current popular research field with wide application prospects. The paper summarizes the common positioning technologies and analyzes the existing positioning algorithms. The mainstream positioning scheme includes WIFI, UWB, Bluetooth, fingerprint, VLC, ZigBee, and RFID. There are many challenges for the update and perfection of the positioning technology and algorithm, such as:
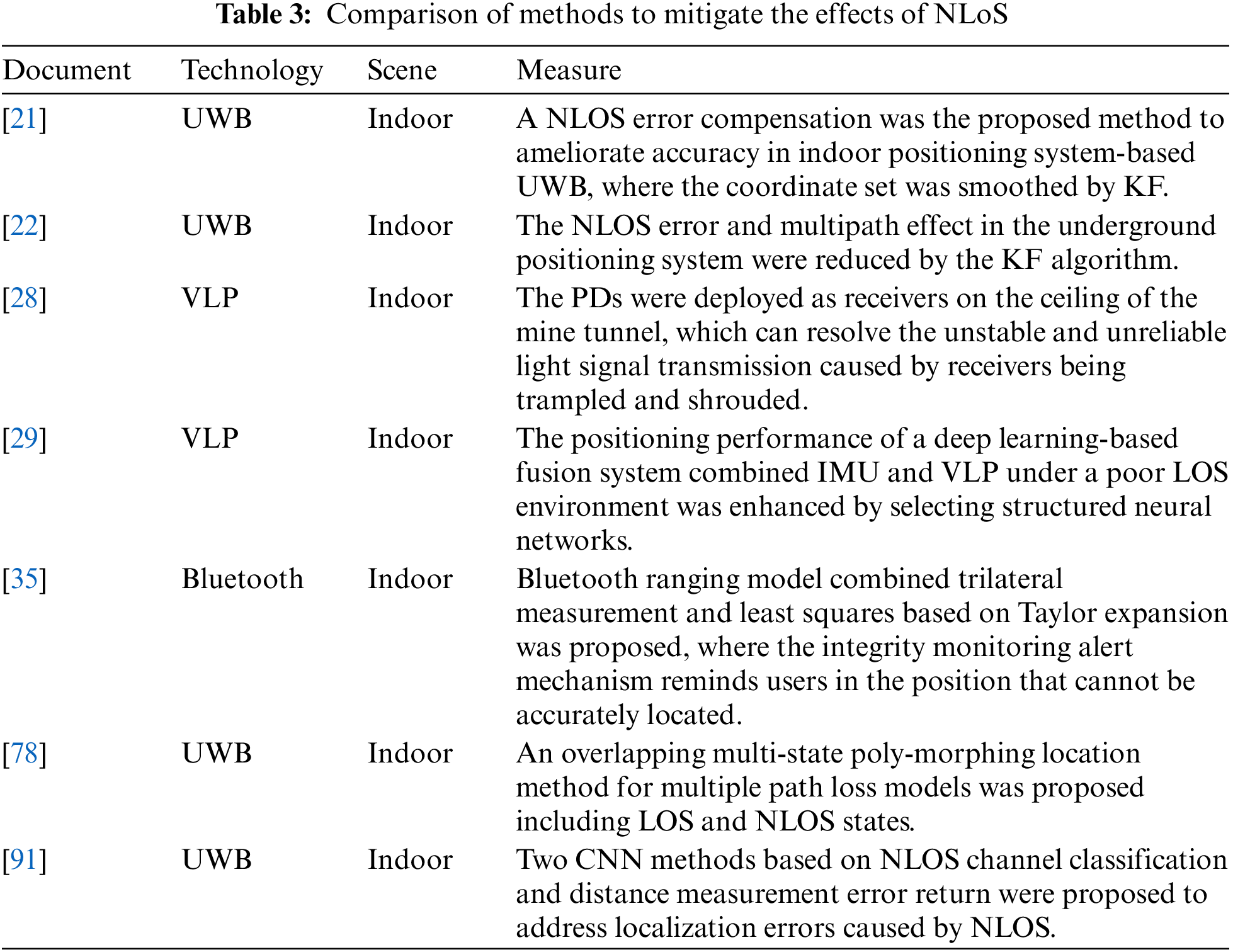
1. The accuracy of traditional positioning technologies is poor in the indoor environment, about a few meters. Moreover, positioning accuracy in a tanglesome environment is affected by many factors, such as NLoS and multipath effect; thus, positioning accuracy can be improved by enhancing the anti-interference ability for NLoS and multipath effect. Table 3 contrasts the different approaches to mitigate the impact of NLoS.
2. The emerging positioning algorithms integrated with matured traditional algorithms played roles in positioning fields, such as the neural network positioning method with anti-interference, fast running speed, and high positioning accuracy [89–92], which can effectively solve the influence of multipath effect and noise on the positioning effect. On the other hand, RIS, an emerging technology in 6G, can be used to enhance the communication quality, communication rangeability, and performance of wireless positioning; thus RIS assisted positioning technologies were studied in millimeter wave systems [119], smart radio environments [120], multiuser systems [121,122], near-field propagation environment [123], and UWB systems [124].
3. The carrier of a positioning signal can be electromagnetic waves, sound waves, and ultrasonic waves. Electromagnetic waves are widely used in wireless communication and radar fields due to their high speed and long-distance transmission. Millimeter wave and massive MIMO systems provide high temporal and spatial resolution in the angular domain. Compared with other carriers, electromagnetic waves are less susceptible to obstacles during signal transmission, which can penetrate buildings and walls, leading to higher positioning accuracy in indoor and urban environments. In summary, electromagnetic waves, as the carrier of positioning signals, have the advantages of high accuracy, long-distance transmission, and resistance to interference.
4. As a relatively mature positioning technology, the global navigation satellite system (GNSS) has a relatively complete evaluation system with positioning precision, completeness, continuity, and usability as the evaluation index. The existing positioning technologies have not reached the mature level of GNSS. With the continuous improvement of positioning technology, positioning accuracy indoors or outdoors can meet the current demands, but the reliability and applicability need to be constantly improved. Compared with GNSS, today’s positioning technologies are the result of the blend of multiple positioning technologies, which may contain a variety of signal sources. Therefore, positioning performance evaluation is much more complicated than GNSS.
Acknowledgement: The authors thank (1) Dongkai Cui and Zhifa Tian (School of Physics and Electronic Information Engineering, University of Henan Polytechnic, China), for their valuable help downloading the papers [18,21,29] on 27 January 2023. (2) Xuesong Gao (School of Physics and Electronic Information Engineering, University of Henan Polytechnic, China) for sending an electronic version of the paper [143,146] on 28 June 2023. (3) The authors thank the anonymous reviewers and journal editors. Your constructive comments have improved the quality of this paper.
Funding Statement: LXW, ZH, GC, and DY are supported by the Key Project of Guizhou Science and Technology Support Program, Guizhou Key Science and Support [2021]-001. In addition, LXW is supported by the Key Laboratory of Cognitive Radio and Information Processing, Ministry of Education (Guilin University of Electronic Technology) (CRKL220203), Key Laboratory of Middle Atmosphere and Global Environment Observation (LAGEO) Institute of Atmospheric Physics, Chinese Academy of Sciences (LAGEO-2022-02), Henan Province Key R&D and Promotion Special Project (No. 212102210166), and “Double First-Class” Discipline Creation Project of Surveying Science and Technology (GCCRC202306).
Author Contributions: The authors confirm their contribution to the paper as follows: study conception and design: Xingwang Li, Hua Pang, Geng Li, Junjie Jiang; data collection: Xingwang Li, Hua Pang, Geng Li; analysis and interpretation of results: Hui Zhang, Changfei Gu, Dong Yuan; draft manuscript preparation: Xingwang Li, Hua Pang, Junjie Jiang. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Boccardi, F., Heath, R. W., Lozano, A., Marzetta, T. L., Popovski, P. (2014). Five disruptive technology directions for 5G. IEEE Communications Magazine, 52(2), 74–80. [Google Scholar]
2. Rappaport, T. S., Xing, Y., MacCartney, G. R., Molisch, A. F., Mellios, E. et al. (2017). Overview of millimeter wave communications for fifth-generation (5G) wireless network-with a focus on propagation models. IEEE Transactions on Antennas and Propagation, 65(12), 6213–6230. [Google Scholar]
3. Li, X., Li, J., Liu, Y., Ding, Z., Nallanathan, A. (2020). Residual transceiver hardware impairments on cooperative NOMA networks. IEEE Transactions on Wireless Communications, 19(1), 680–695. [Google Scholar]
4. Zhang, P., Tao, Y. Z., Zhang, Z. (2016). Review of several key technologies of 5G. Journal of Communications, 37(7), 15–29 (In Chinese). [Google Scholar]
5. Hong, W., Jiang, Z. H., Yu, C., Zhou, J., Chen, P. et al. (2017). Multibeam antenna technologies for 5G wireless communications. IEEE Transactions on Antennas and Propagation, 65(12), 6231–6249. [Google Scholar]
6. Ahmed, M., Wahid, A., Laique, S. S., Khan, W. U., Ihsan, A. et al. (2023). A survey on STAR-RIS: Use cases, recent advances, and future research challenges. IEEE Internet of Things Journal, 10(16), 14689–14711. [Google Scholar]
7. Sun, M., Wang, Y., Huang, L., Jia, H., Bi, J. et al. (2022). Geomagnetic positioning-aided WIFI FTM localization algorithm for NLOS environments. IEEE Communications Letters, 26(5), 1022–1026. [Google Scholar]
8. Zhang, W., Yu, K., Wang, W., Li, X. (2021). A self-adaptive AP selection algorithm based on multiobjective optimization for indoor WIFI positioning. IEEE Internet of Things Journal, 8(3), 1406–1416. [Google Scholar]
9. Yang, C., Shao, H. R (2015). WIFI-based indoor positioning. IEEE Communications Magazine, 53(3), 150–157. [Google Scholar]
10. Pei, L., Liu, J., Guinness, R., Chen, T., Chen, R. et al. (2012). The evaluation of WIFI positioning in a Bluetooth and WIFI coexistence environment. 2012 Ubiquitous Positioning, Indoor Navigation, and Location Based Service (UPINLBS), Helsinki, Finland. [Google Scholar]
11. Jung, S., Lee, C., Han, D. (2011). WIFI fingerprint-based approaches following log-distance path loss model for indoor positioning. 2011 IEEE MTT-S International Microwave Workshop Series on Intelligent Radio for Future Personal Terminals, Daejeon, Korea. [Google Scholar]
12. He, S., Chan, S. H. G. (2016). WIFI fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Communications Surveys & Tutorials, 18(1), 466–490. [Google Scholar]
13. Xia, S., Liu, Y., Yuan, G., Zhu, M., Wang, Z. (2017). Indoor fingerprint positioning based on WIFI: An overview. ISPRS International Journal of Geo-Information, 6(5), 135. [Google Scholar]
14. Chen, K., Wang, C., Yin, Z., Jiang, H., Tan, G. (2018). Slide: Towards fast and accurate mobile fingerprinting for WIFI indoor positioning systems. IEEE Sensors Journal, 18(3), 1213–1223. [Google Scholar]
15. Jian, H. X., Hao, W. (2017). WIFI indoor location optimization method based on position fingerprint algorithm. 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changsha, China. [Google Scholar]
16. Wang, B., Gan, X., Liu, X., Yu, B., Jia, R. et al. (2020). A novel weighted KNN algorithm based on RSS similarity and position distance for WIFI fingerprint positioning. IEEE Access, 8, 30591–30602. [Google Scholar]
17. Ji, W., Zhao, K., Zheng, Z., Yu, C., Huang, S. (2022). Multivariable fingerprints with random forest variable selection for indoor positioning system. IEEE Sensors Journal, 22(6), 5398–5406. [Google Scholar]
18. Chen, Z., Wang, L., Chen, L. (2020). Virtual antenna array and multipath AOA-delay fingerprints based location for moving targets. IEEE Access, 8, 186919–186931. [Google Scholar]
19. Zheng, Y., Li, Q., Wang, C., Li, X., Yang, B. (2021). A magnetic-based indoor positioning method on fingerprint and confidence evaluation. IEEE Sensors Journal, 21(5), 5932–5943. [Google Scholar]
20. Shao, W., Luo, H., Zhao, F., Ma, Y., Zhao, Z. et al. (2018). Indoor positioning based on fingerprint-image and deep learning. IEEE Access, 6, 74699–74712. [Google Scholar]
21. Yassin, A., Nasser, Y., Awad, M., Al-Dubai, A., Liu, R. et al. (2017). Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Communications Surveys & Tutorials, 19(2), 1327–1346. [Google Scholar]
22. Elsanhoury, M., Mäkelä, P., Koljonen, J., Välisuo, P., Shamsuzzoha, A. et al. (2022). Precision positioning for smart logistics using ultra-wideband technology-based indoor navigation: A review. IEEE Access, 10, 44413–44445. [Google Scholar]
23. Yin, Z., Jiang, X., Yang, Z., Zhao, N., Chen, Y. (2019). WUB-IP: A high-precision UWB positioning scheme for indoor multiuser applications. IEEE Systems Journal, 13(1), 279–288. [Google Scholar]
24. Kim, D. H., Pyun, J. Y. (2021). NLOS identification based UWB and PDR hybrid positioning system. IEEE Access, 9, 102917–102929. [Google Scholar]
25. Yang, X., Wang, J., Song, D., Feng, B., Ye, H. (2021). A novel NLOS error compensation method based IMU for UWB indoor positioning system. IEEE Sensors Journal, 21(9), 11203–11212. [Google Scholar]
26. Cheng, J. H., Yu, P. P., Huang, Y. R. (2021). Application of improved kalman filter in under-ground positioning system of coal mine. IEEE Transactions on Applied Superconductivity, 31(8), 1–4. [Google Scholar]
27. Li, M. G., Zhu, H., You, S. Z., Tang, C. Q. (2020). UWB-based localization system aided with inertial sensor for underground coal mine applications. IEEE Sensors Journal, 20(12), 6652–6669. [Google Scholar]
28. Cui, Y., Liu, S., Yao, J., Gu, C. (2021). Integrated positioning system of unmanned automatic vehicle in coal mines. IEEE Transactions on Instrumentation and Measurement, 70, 1–13. [Google Scholar]
29. Moon, S., Youn, W. (2022). A novel movable UWB localization system using UAVs. IEEE Access, 10, 41303–41312. [Google Scholar]
30. Yang, S. H., Jung, E. M., Han, S. K. (2013). Indoor location estimation based on LED visible light communication using multiple optical receivers. IEEE Communications Letters, 17(9), 1834–1837. [Google Scholar]
31. Wang, C., Wang, L., Chi, X., Liu, S., Shi, W. et al. (2015). The research of indoor positioning based on visible light communication. China Communications, 12(8), 85–92. [Google Scholar]
32. Pang, M., Shen, G., Yang, X., Zhang, K., Chen, P. et al. (2022). Achieving reliable underground positioning with visible light. IEEE Transactions on Instrumentation and Measurement, 71, 1–15. [Google Scholar]
33. Hua, L., Zhuang, Y., Yang, J. (2021). Deep learning-based fusion of visible light positioning and IMU sensors. 2021 20th International Conference on Ubiquitous Computing and Communications (IUCC/CIT/DSCI/SmartCNS), London, UK. [Google Scholar]
34. Lin, X., Zhang, L. (2020). Intelligent and practical deep learning aided positioning design for visible light communication receivers. IEEE Communications Letters, 24(3), 577–580. [Google Scholar]
35. Sun, X., Zhuang, Y., Huai, J., Hua, L., Chen, D. et al. (2022). RSS-based visible light positioning using nonlinear optimization. IEEE Internet of Things Journal, 9(15), 14137–14150. [Google Scholar]
36. Li, H., Huang, H., Xu, Y., Wei, Z., Yuan, S. et al. (2020). A fast and high-accuracy real-time visible light positioning system based on single LED lamp with a beacon. IEEE Photonics Journal, 12(6), 1–12. [Google Scholar]
37. Fang, J., Yang, Z., Long, S., Wu, Z., Zhao, X. et al. (2017). High-speed indoor navigation system based on visible light and mobile phone. IEEE Photonics Journal, 9(2), 1–11. [Google Scholar]
38. Zafari, F., Gkelias, A., Leung, K. K. (2019). A survey of indoor localization systems and technologies. IEEE Communications Surveys & Tutorials, 21(3), 2568–2599. [Google Scholar]
39. Yao, H., Shu, H., Liang, X., Yan, H., Sun, H. (2020). Integrity monitoring for bluetooth low energy beacons RSSI based indoor positioning. IEEE Access, 8, 215173–215191. [Google Scholar]
40. Maus, G., Pörner, H., Ahrens, R., Brückmann, D. (2022). A phase normalization scheme for angle of arrival based bluetooth indoor localization. 2022 IEEE 65th International Midwest Symposium on Circuits and Systems (MWSCAS), Fukuoka, Japan. [Google Scholar]
41. Bai, L., Ciravegna, F., Bond, R., Mulvenna, M. (2020). A low cost indoor positioning system using bluetooth low energy. IEEE Access, 8, 136858–136871. [Google Scholar]
42. Yang, B., Dai, C., Ye, H., Long, Z. (2020). Research on high precision indoor positioning method based on low power bluetooth technology. 2020 6th International Conference on Big Data and Information Analytics (BigDIA), Shenzhen, China. [Google Scholar]
43. Kumar, G., Gupta, V., Tank, R. (2020). Phase-based angle estimation approach in indoor localization system using bluetooth low energy. 2020 International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India. [Google Scholar]
44. Latina, M. A. E., Reyes, A., Rollon, E. M. (2022). Optimization of RSSI-based zigbee indoor localization system for determining distances between unknown nodes. 2022 First International Conference on Electrical, Electronics, Information and Communication Technologies (ICEEICT), Trichy, India. [Google Scholar]
45. Jiao, S. B., Song, D., Zhang, Q., Tang, J. W. (2013). Coal mine monitoring system based on ZigBee wireless sensor network. Journal of Electronic Measurement and Instrumentation, 27(5), 436–442. [Google Scholar]
46. Guo, H., Li, H., Xiong, J., Yu, M. (2019). Indoor positioning system based on particle swarm optimization algorithm. Measurement, 134, 908–913. [Google Scholar]
47. Aykaç, M., Erçelebi, E., Baha Aldin, N. (2017). ZigBee-based indoor localization system with the personal dynamic positioning method and modified particle filter estimation. Analog Integrated Circuits and Signal Processing, 92(2), 263–279. [Google Scholar]
48. Motroni, A., Buffi, A., Nepa, P. (2021). A survey on indoor vehicle localization through RFID technology. IEEE Access, 9, 17921–17942. [Google Scholar]
49. Saab, S. S., Nakad, Z. S. (2011). A standalone RFID indoor positioning system using passive tags. IEEE Transactions on Industrial Electronics, 58(5), 1961–1970. [Google Scholar]
50. Yao, C. Y., Hsia, W. C. (2018). An indoor positioning system based on the dual-channel passive RFID technology. IEEE Sensors Journal, 18(11), 4654–4663. [Google Scholar]
51. Tang, Y., C, Y. (2021). The RFID localization based on the differential evolution algorithm. Terahertz Journal of Science and Electronic Informatics, 19(5), 946–950. [Google Scholar]
52. Li, Y., Wu, H., Sun, Y. (2022). Improved adaptive genetic algorithm based RFID positioning. Journal of Systems Engineering and Electronics, 33(2), 305–311. [Google Scholar]
53. Chen, Z., Zhang, Q., Pan, M., Chen, D., Wan, C. et al. (2018). A new geomagnetic matching navigation method based on multidimensional vector elements of earth’s magnetic field. IEEE Geoscience and Remote Sensing Letters, 15(8), 1289–1293. [Google Scholar]
54. Liu, Z., Zhang, L., Liu, Q., Yin, Y., Cheng, L. et al. (2017). Fusion of magnetic and visual sensors for indoor localization: Infrastructure-free and more effective. IEEE Transactions on Multimedia, 19(4), 874–888. [Google Scholar]
55. Qi, X., Chen, L., An, K., Wang, J., Zhang, B. et al. (2018). Bioinspired in-grid navigation and positioning based on an artificially established magnetic gradient. IEEE Transactions on Vehicular Technology, 67(11), 10583–10589. [Google Scholar]
56. Shu, Y., Bo, C., Shen, G., Zhao, C., Li, L. et al. (2015). Magicol: Indoor localization using pervasive magnetic field and opportunistic WIFI sensing. IEEE Journal on Selected Areas in Communications, 33(7), 1443–1457. [Google Scholar]
57. Ji, C., Chen, Q., Song, C. (2020). Improved particle swarm optimization geomagnetic matching algorithm based on simulated annealing. IEEE Access, 8, 226064–226073. [Google Scholar]
58. Wang, J., Guo, Y., Guo, L., Zhang, B., Wu, B. (2019). Performance test of MPMD matching algorithm for geomagnetic and RFID combined underground positioning. IEEE Access, 7, 129789–129801. [Google Scholar]
59. Kim, B., Kong, S. H. (2016). A novel indoor positioning technique using magnetic fingerprint difference. IEEE Transactions on Instrumentation and Measurement, 65(9), 2035–2045. [Google Scholar]
60. Li, K., Gong, Q., Ren, Y., Li, Y., Han, Y. et al. (2022). Magnetic field positioning technology of indoor sports bodies. IEEE Sensors Journal, 22(1), 219–228. [Google Scholar]
61. Bhattarai, B., Yadav, R. K., Gang, H. S., Pyun, J. Y. (2019). Geomagnetic field based indoor landmark classification using deep learning. IEEE Access, 7, 33943–33956. [Google Scholar]
62. Chen, H., Wang, G., Ansari, N. (2019). Improved robust TOA-based localization via NLOS balancing parameter estimation. IEEE Transactions on Vehicular Technology, 68(6), 6177–6181. [Google Scholar]
63. Yang, G., Zhao, L., Dai, Y., Xu, Y. (2017). A KFL-TOA UWB indoor positioning method for complex environment. 2017 Chinese Automation Congress (CAC), Jinan, China. [Google Scholar]
64. Li, Y. Y., Qi, G. Q., Sheng, A. D. (2018). Performance metric on the best achievable accuracy for hybrid TOA/AOA target localization. IEEE Communications Letters, 22(7), 1474–1477. [Google Scholar]
65. Yiming, Y., Yao, Y., C, X. (2013). Introduction of TDOA positioning technology and practical application. China Radio, 11(3), 57–58. [Google Scholar]
66. Ping, Z., Hao, C. (2018). A survey of positioning technology for 5G. Journal of Beijing University of Posts and Telecommunications, 41(5), 1–12 (In Chinese). [Google Scholar]
67. Cao, S., Chen, X., Zhang, X., Chen, X. (2020). Combined weighted method for TDOA-based localization. IEEE Transactions on Instrumentation and Measurement, 69(5), 1962–1971. [Google Scholar]
68. Su, Z., Shao, G., Liu, H. (2018). Semidefinite programming for NLOS error mitigation in TDOA localization. IEEE Communications Letters, 22(7), 1430–1433. [Google Scholar]
69. Qu, X., Xie, L., Tan, W. (2017). Iterative constrained weighted least squares source localization using TDOA and FDOA measurements. IEEE Transactions on Signal Processing, 65(15), 3990–4003. [Google Scholar]
70. Ma, X., Ballal, T., Chen, H., Aldayel, O., Al-Naffouri, T. Y. (2021). A maximum-likelihood TDOA localization algorithm using difference-of-convex programming. IEEE Signal Processing Letters, 28, 309–313. [Google Scholar]
71. Chen, H., Ballal, T., Saeed, N., Alouini, M. S., Al-Naffouri, T. Y. (2020). A joint TDOA-PDOA localization approach using particle swarm optimization. IEEE Wireless Communications Letters, 9(8), 1240–1244. [Google Scholar]
72. Liu, H., Darabi, H., Banerjee, P., Liu, J. (2007). Survey of wireless indoor positioning techniques and systems. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 37(6), 1067–1080. [Google Scholar]
73. Junhui, Z., Cong, Z. (2011). TOA/AOA proved hybrid positioning algorithm for NLOS in wireless sensor network. China Communications, 8(8), 106–110. [Google Scholar]
74. Zheng, Y., Sheng, M., Liu, J., Li, J. (2019). Exploiting AOA estimation accuracy for indoor localization: A weighted AOA-based approach. IEEE Wireless Communications Letters, 8(1), 65–68. [Google Scholar]
75. Yu, Y., Xu, K., Xia, X. C., Zhou, T., Li, B. Y. et al. (2022). Multiple AIRS assisted AOA localization in complex terrain. Communication Technology, 55(6), 740–746. [Google Scholar]
76. Wang, Z., Luo, J. A., Zhang, X. P. (2012). A novel location-penalized maximum likelihood estimator for bearing-only target localization. IEEE Transactions on Signal Processing, 60(12), 6166–6181. [Google Scholar]
77. Shao, H. J., Zhang, X. P., Wang, Z. (2014). Efficient closed-form algorithms for AOA based self-localization of sensor nodes using auxiliary variables. IEEE Transactions on Signal Processing, 62(10), 2580–2594. [Google Scholar]
78. Zhu, Q. X. (2020). A 3D AOA localization method to reduce the bias. Wireless Communication Technology, 29(1), 1–5. [Google Scholar]
79. Golestanian, M., Poellabauer, C. (2019). VariLoc: Path loss exponent estimation and localization using multi-range beaconing. IEEE Communications Letters, 23(4), 724–727. [Google Scholar]
80. Pinto, B., Barreto, R., Souto, E., Oliveira, H. (2021). Robust RSSI-based indoor positioning system using K-means clustering and Bayesian estimation. IEEE Sensors Journal, 21(21), 24462–24470. [Google Scholar]
81. Lee, B. H, Ham, D., Choi, J., Kim, S. C., Kim, Y. H. (2021). Genetic algorithm for path loss model selection in signal strength-based indoor localization. IEEE Sensors Journal, 21(21), 24285–24296. [Google Scholar]
82. Booranawong, A., Sengchuai, K., Buranapanichkit, D., Jindapetch, N., Saito, H. (2021). RSSI-based indoor localization using multi-lateration with zone selection and virtual position-based compensation methods. IEEE Access, 9, 46223–46239. [Google Scholar]
83. Savazzi, P., Goldoni, E., Vizziello, A., Favalli, L., Gamba, P. (2019). A wiener-based RSSI localization algorithm exploiting modulation diversity in lora networks. IEEE Sensors Journal, 19(24), 12381–12388. [Google Scholar]
84. Alsmadi, L., Kong, X., Sandrasegaran, K., Fang, G. (2021). An improved indoor positioning accuracy using filtered RSSI and Beacon weight. IEEE Sensors Journal, 21(16), 18205–18213. [Google Scholar]
85. Hoang, M. T., Zhu, Y., Yuen, B., Reese, T., Dong, X. et al. (2018). A soft range limited K-nearest neighbors algorithm for indoor localization enhancement. IEEE Sensors Journal, 18(24), 10208–10216. [Google Scholar]
86. Li, D., Zhang, B., Li, C. (2016). A feature scaling based k-nearest neighbor algorithm for indoor positioning system. IEEE Internet of Things Journal, 3(4), 590–597. [Google Scholar]
87. Zhang, H., Wang, Z., Xia, W., Ni, Y., Zhao, H. (2022). Weighted adaptive KNN algorithm with historical information fusion for fingerprint positioning. IEEE Wireless Communications Letters, 11(5), 1002–1006. [Google Scholar]
88. Strohmeier, M., Martinovic, I., Lenders, V. (2018). A k-NN-based localization approach for crowdsourced air traffic communication networks. IEEE Transactions on Aerospace and Electronic Systems, 54(3), 1519–1529. [Google Scholar]
89. Wu, S., Zhang, S., Xu, K., Huang, D. (2019). Neural network localization with TOA measurements based on error learning and matching. IEEE Access, 7, 19089–19099. [Google Scholar]
90. Zhang, W., Liu, K., Zhang, W., Zhang, Y., Gu, J. (2016). Deep neural networks for wireless localization in indoor and outdoor environments. Neurocomputing, 194, 279–287. [Google Scholar]
91. Wu, S., Huang, W., Li, M., Xu, K. (2022). A novel RSSI fingerprint positioning method based on virtual ap and convolutional neural network. IEEE Sensors Journal, 22(7), 6898–6909. [Google Scholar]
92. Hoang, M. T., Yuen, B., Dong, X., Lu, T., Westendorp, R. et al. (2019). Recurrent neural networks for accurate RSSI indoor localization. IEEE Internet of Things Journal, 6(6), 10639–10651. [Google Scholar]
93. Mahdavi, F., Zayyani, H., Rajabi, R. (2021). RSS localization using an optimized fusion of two deep neural networks. IEEE Sensors Letters, 5(12), 1–4. [Google Scholar]
94. Song, X., Fan, X., Xiang, C., Ye, Q., Liu, L. et al. (2019). A novel convolutional neural network based indoor localization framework with WIFI fingerprinting. IEEE Access, 7, 110698–110709. [Google Scholar]
95. Bregar, K., Mohorčič, M. (2018). Improving indoor localization using convolutional neural networks on computationally restricted devices. IEEE Access, 6, 17429–17441. [Google Scholar]
96. Hou, C., Xie, Y., Zhang, Z. (2022). An improved convolutional neural network based indoor localization by using jenks natural breaks algorithm. China Communications, 19(4), 291–301. [Google Scholar]
97. Wang, W., Zhu, Q., Wang, Z., Zhao, X., Yang, Y. (2022). Research on indoor positioning algorithm based on SAGA-BP neural network. IEEE Sensors Journal, 22(4), 3736–3744. [Google Scholar]
98. Bagga, P., Das, A. K., Wazid, M., Rodrigues, J. J. P. C., Park, Y. (2020). Authentication protocols in internet of vehicles: Taxonomy, analysis, and challenges. IEEE Access, 8, 54314–54344. [Google Scholar]
99. Yang, F., Wang, S., Li, J., Liu, Z., Sun, Q. (2014). An overview of internet of vehicles. China Communications, 11(10), 1–15. [Google Scholar]
100. Kaiwartya, O., Abdullah, A. H., Cao, Y., Altameem, A., Prasad, M. et al. (2016). Internet of vehicles: Motivation, layered architecture, network model, challenges, and future aspects. IEEE Access, 4, 5356–5373. [Google Scholar]
101. Lu, N., Cheng, N., Zhang, N., Shen, X., Mark, J. W. (2014). Connected vehicles: Solutions and challenges. IEEE Internet of Things Journal, 1(4), 289–299. [Google Scholar]
102. Alam, N., Tabatabaei Balaei, A., Dempster, A. G. (2013). Relative positioning enhancement in VANETs: A tight integration approach. IEEE Transactions on Intelligent Transportation Systems, 14(1), 47–55. [Google Scholar]
103. Yao, J., Balaei, A. T., Hassan, M., Alam, N., Dempster, A. G. (2011). Improving cooperative positioning for vehicular networks. IEEE Transactions on Vehicular Technology, 60(6), 2810–2823. [Google Scholar]
104. Fogue, M., Martinez, F. J., Garrido, P., Fiore, M., Chiasserini, C. F. et al. (2015). Securing warning message dissemination in VANETs using cooperative neighbor position verification. IEEE Transactions on Vehicular Technology, 64(6), 2538–2550. [Google Scholar]
105. Chen, L. W., Shih, H. W. (2016). Design and analysis of an infrastructure-less framework for lane positioning, tracking, and requesting through vehicular sensor networks. IEEE Communications Letters, 20(10), 2083–2086. [Google Scholar]
106. Wang, L. L., Gui, J. S., Deng, X. H., Zeng, F., Kuang, Z. F. (2020). Routing algorithm based on vehicle position analysis for Internet of Vehicles. IEEE Internet of Things Journal, 7(12), 11701–11712. [Google Scholar]
107. Song, Y., Fu, Y., Yu, F. R., Zhou, L. (2020). Blockchain-enabled internet of vehicles with cooperative positioning: A deep neural network approach. IEEE Internet of Things Journal, 7(4), 3485–3498. [Google Scholar]
108. Shieh, W. Y., Hsu, C. C. J., Lin, C. H., Wang, T. H. (2018). Investigation of vehicle positioning by infrared signal-direction discrimination for short-range vehicle-to-vehicle communications. IEEE Transactions on Vehicular Technology, 67(12), 11563–11574. [Google Scholar]
109. Zeng, S., Zhang, H., Di, B., Han, Z., Song, L. (2021). Reconfigurable intelligent surface (RIS) assisted wireless coverage extension: RIS orientation and location optimization. IEEE Communications Letters, 25(1), 269–273. [Google Scholar]
110. Wu, Q., Zhang, R. (2019). Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Transactions on Wireless Communications, 18(11), 5394–5409. [Google Scholar]
111. Zhang, H., Hu, J., Zhang, H., Di, B., Bian, K. et al. (2022). MetaRadar: Indoor localization by reconfigurable metamaterials. IEEE Transactions on Mobile Computing, 21(8), 2895–2908. [Google Scholar]
112. Dardari, D. (2020). Communicating with large intelligent surfaces: Fundamental limits and models. IEEE Journal on Selected Areas in Communications, 38(11), 2526–2537. [Google Scholar]
113. Zhang, H., Zhang, H., Di, B., Bian, K., Han, Z. et al. (2021). Towards ubiquitous positioning by leveraging reconfigurable intelligent surface. IEEE Communications Letters, 25(1), 284–288. [Google Scholar]
114. Li, X., Xie, Z., Chu, Z., Menon, V. G., Mumtaz, S. et al. (2022). Exploiting benefits of IRS in wireless powered NOMA networks. IEEE Transactions on Green Communications and Networking, 6(1), 175–186. [Google Scholar]
115. Li, X., Zheng, Y., Zeng, M., Liu, Y., Dobre, O. A. (2023). Enhancing secrecy performance for STAR-RIS NOMA networks. IEEE Transactions on Vehicular Technology, 72(2), 2684–2688. [Google Scholar]
116. He, J., Wymeersch, H., Sanguanpuak, T., Silven, O., Juntti, M. (2020). Adaptive beamforming design for mmWave RIS-aided joint localization and communication. 2020 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Seoul, Korea (South). [Google Scholar]
117. Hashida, H., Kawamoto, Y., Kato, N. (2020). Intelligent reflecting surface placement optimization in air-ground communication networks toward 6G. IEEE Wireless Communications, 27(6), 146–151. [Google Scholar]
118. Li, D. (2021). Fairness-aware multiuser scheduling for finite-resolution intelligent reflecting surface-assisted communication. IEEE Communications Letters, 25(7), 2395–2399. [Google Scholar]
119. Elzanaty, A., Guerra, A., Guidi, F., Alouini, M. S. (2021). Reconfigurable intelligent surfaces for localization: Position and orientation error bounds. IEEE Transactions on Signal Processing, 69, 5386–5402. [Google Scholar]
120. Keykhosravi, K., Keskin, M. F., Dwivedi, S., Seco-Granados, G., Wymeersch, H. (2021). Semi-passive 3D positioning of multiple RIS-enabled users. IEEE Transactions on Vehicular Technology, 70(10), 11073–11077. [Google Scholar]
121. Zhang, H., Zhang, H., Di, B., Bian, K., Han, Z. et al. (2021). Metalocalization: Reconfigurable intelligent surface aided multi-user wireless indoor localization. IEEE Transactions on Wireless Communications, 20(12), 7743–7757. [Google Scholar]
122. Rinchi, O., Elzanaty, A., Alouini, M. S. (2022). Compressive near-field localization for multipath RIS-aided environments. IEEE Communications Letters, 26(6), 1268–1272. [Google Scholar]
123. Ma, T., Xiao, Y., Lei, X., Xiong, W., Ding, Y. (2021). Indoor localization with reconfigurable intelligent surface. IEEE Communications Letters, 25(1), 161–165. [Google Scholar]
124. Popoola, O., Ansari, S., Ansari, R. I., Mohjazi, L., Hassan, S. A. et al. (2021). IRS-assisted localization for airborne mobile networks. Autonomous Airborne Wireless Networks, 8, 141–156. [Google Scholar]
125. Shahmansoori, A., Garcia, G. E., Destino, G., Seco-Granados, G., Wymeersch, H. (2018). Position and orientation estimation through millimeter-wave MIMO in 5G systems. IEEE Transactions on Wireless Communications, 17(3), 1822–1835. [Google Scholar]
126. Shahmansoori, A., Uguen, B., Destino, G., Seco-Granados, G., Wymeersch, H. (2019). Tracking position and orientation through millimeter wave lens MIMO in 5G systems. IEEE Signal Processing Letters, 26(8), 1222–1226. [Google Scholar]
127. Mendrzik, R., Wymeersch, H., Bauch, G., Abu-Shaban, Z. (2019). Harnessing NLOS components for position and orientation estimation in 5G millimeter wave MIMO. IEEE Transactions on Wireless Communications, 18(1), 93–107. [Google Scholar]
128. Wang, W., Zhang, W. (2021). Joint beam training and positioning for intelligent reflecting surfaces assisted millimeter wave communications. IEEE Transactions on Wireless Communications, 20(10), 6282–6297. [Google Scholar]
129. Gao, P., Lian, L., Yu, J. (2022). Wireless area positioning in ris-assisted mmWave systems: Joint passive and active Beamforming design. IEEE Signal Processing Letters, 29, 1372–1376. [Google Scholar]
130. Ma, T., Xiao, Y., Lei, X., Xiong, W., Xiao, M. (2023). Distributed reconfigurable intelligent surfaces assisted indoor positioning. IEEE Transactions on Wireless Communications, 22(1), 47–58. [Google Scholar]
131. Kimionis, J., Bletsas, A., Sahalos, J. N. (2014). Increased range bistatic scatter radio. IEEE Transactions on Communications, 62(3), 1091–1104. [Google Scholar]
132. Bharadia, D., Joshi, K., Kotaru, M., Katti, S. (2015). BackFi: High throughput WIFI backscatter. ACM SIGCOMM Computer Communication Review, 45(4), 283–296. [Google Scholar]
133. Iyer, V., Talla, V., Kellogg, B., Smith, J. R., Gollakota, S. (2017). Inter-technology backscatter: Towards internet connectivity for implanted devices. Mobile Computing and Communications Review, 21(3), 35–38. [Google Scholar]
134. Talla, V., Hessar, M., Kellogg, B., Najafi, A., Smith, J. R. et al. (2017). LoRa backscatter: Enabling the vision of ubiquitous connectivity. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, vol. 1, no. 3, pp. 1–24. [Google Scholar]
135. Zhao, W., Wang, G., Atapattu, S., Tsiftsis, T. A., Ma, X. (2020). Performance analysis of large intelligent surface aided backscatter communication systems. IEEE Wireless Communications Letters, 9(7), 962–966. [Google Scholar]
136. Jang, J., Adib, F. (2019). Underwater backscatter networking. Association for Computing Machinery, 9(13), 187–199. [Google Scholar]
137. Hessar, M., Najafi, A., Gollakota, S. (2019). NetScatter: Enabling large-scale backscatter networks. 16th USENIX Symposium on Networked Systems Design and Implementation (NSDI 19), Boston, MA, USA. [Google Scholar]
138. Wang, H., Li, X., Jhaveri, R. H., Gadekallu, T. R., Zhu, M. et al. (2021). Sparse Bayesian learning based channel estimation in FBMC/OQAM industrial IOT networks. Computer Communications, 176, 40–45. [Google Scholar]
139. Nagley, G. (2020). Backscatter technologies and the future of Internet of Things: Challenges and opportunities. Intelligent and Integrated Networks, 1(2), 170–180. [Google Scholar]
140. Liu, V., Parks, A. N., Talla, V., Gollakota, S., Wetherall, D. J. et al. (2013). Ambient backscatter: Wireless communication out of thin air. ACM SIGCOMM Computer Communication Review, 43(4), 39–50. [Google Scholar]
141. Li, X., Wang, Q., Zeng, M., Liu, Y., Dang, S. et al. (2023). Physical-layer authentication for ambient backscatter-aided NOMA symbiotic systems. IEEE Transactions on Communications, 71(4), 2288–2303. [Google Scholar]
142. Zhang, W., Qin, Y., Zhao, W., Jia, M., Liu, Q. et al. (2019). A green paradigm for Internet of Things: Ambient backscatter communications. China Communications, 16(7), 109–119. [Google Scholar]
143. Li, X., Zhao, M., Zeng, M., Mumtaz, S., Menon, V. G. et al. (2021). Hardware impaired ambient backscatter noma systems: Reliability and security. IEEE Transactions on Communications, 69(4), 2723–2736. [Google Scholar]
144. Zhang, S., Wang, W., Tang, S., Jin, S., Jiang, T. (2020). Robot-assisted backscatter localization for IoT applications. IEEE Transactions on Wireless Communications, 19(9), 5807–5818. [Google Scholar]
145. Liu, T., Liu, Y., Yang, L., Guo, Y., Wang, C. (2016). BackPos: High accuracy backscatter positioning system. IEEE Transactions on Mobile Computing, 15(3), 586–598. [Google Scholar]
146. Singh, K., Tejeshwini, D. N., Patel, S., Sudhir, S., Ahmed, Z. M. et al. (2020). Localization of life safety vests in an aircraft using backscattering RFID communication. IEEE Journal of Radio Frequency Identification, 4(3), 234–245. [Google Scholar]
147. Lazaro, A., Lazaro, M., Villarino, R. (2021). Room-level localization system based on LoRa backscatters. IEEE Access, 9, 16004–16018. [Google Scholar]
148. Wang, K., Gu, J. F., Ren, F., Wu, K. (2017). A multitarget active backscattering 2-D positioning system with superresolution time series post-processing technique. IEEE Transactions on Microwave Theory and Techniques, 65(5), 1751–1766. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools