
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Decoupling Algorithms for the Gravitational Wave Spacecraft
1 Key Laboratory of Space Active Opto-Electronics Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai, 200083, China
2 University of Chinese Academy of Sciences, Beijing, 100049, China
3 Key Laboratory of Gravitational Wave Precision Measurement of Zhejiang Province, Hangzhou Institute for Advanced Study, Hangzhou, 310024, China
* Corresponding Authors: Jianjun Jia. Email: ; Yikun Wang. Email:
Computer Modeling in Engineering & Sciences 2024, 140(1), 325-337. https://doi.org/10.32604/cmes.2024.048804
Received 19 December 2023; Accepted 08 February 2024; Issue published 16 April 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The gravitational wave spacecraft is a complex multi-input multi-output dynamic system. The gravitational wave detection mission requires the spacecraft to achieve single spacecraft with two laser links and high-precision control. Establishing one spacecraft with two laser links, compared to one spacecraft with a single laser link, requires an upgraded decoupling algorithm for the link establishment. The decoupling algorithm we designed reassigns the degrees of freedom and forces in the control loop to ensure sufficient degrees of freedom for optical axis control. In addressing the distinct dynamic characteristics of different degrees of freedom, a transfer function compensation method is used in the decoupling process to further minimize motion coupling. The open-loop frequency response of the system is obtained through simulation. The upgraded decoupling algorithms effectively reduce the open-loop frequency response by 30 dB. The transfer function compensation method efficiently suppresses the coupling of low-frequency noise.Keywords
In 2016, the LIGO team in the United States announced the detection of gravitational waves. It was the first direct detection of gravitational waves in human history. To detect gravitational waves at lower frequencies, researchers have proposed space gravitational wave detection missions such as the Laser Interferometer Space Antenna (LISA) [1], Taiji [2] and TianQin [3]. Interest in this research field is steadily growing, with related studies spanning various aspects such as orbit [4], laser links [5], low-noise mechanisms [6], algorithms [7], and more. As shown in Fig. 1, the space gravitational wave detection formation consists of three identical spacecraft, each with two Moving Optical Assemblies (MOAs). Each MOA consists of an optical bench (OB), a telescope, and a test mass (TM) protected in the electrode cage. The three spacecraft form a triangular constellation with an interferometric arm between each two. Gravitational waves are detected by measuring the change in distance between two TMs on the same interferometric arm. The MOA can be driven to rotate around its pivot by the Optical Assembly Tracking Mechanism (OATM) [8].
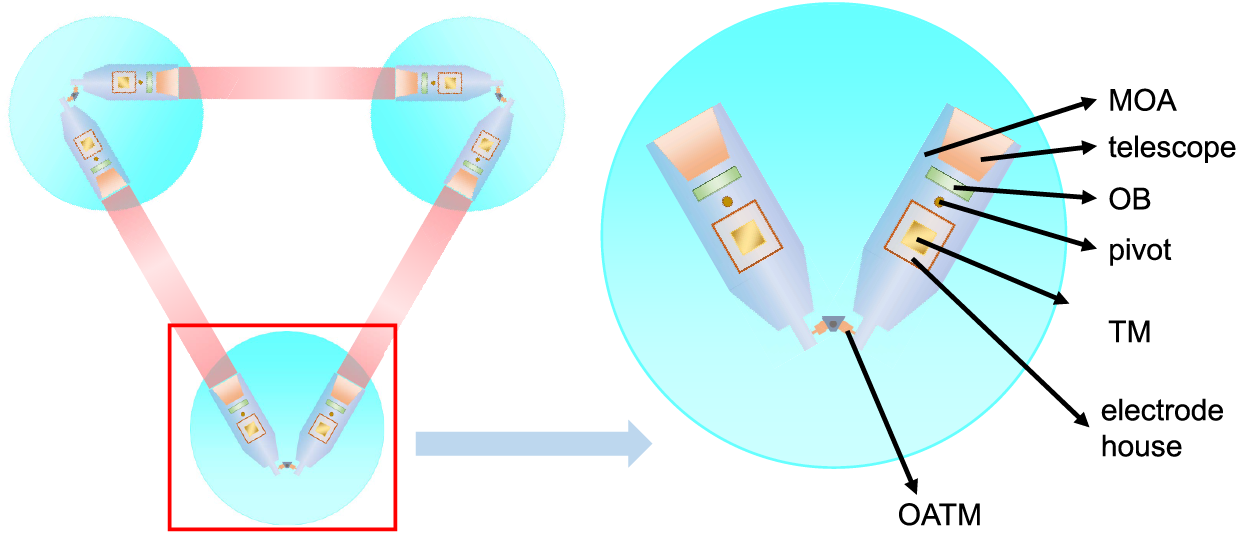
Figure 1: Gravitational wave spacecraft
In these space-based gravitational wave detection missions, the laser acquisition should be achieved prior to scientific measurement. Various acquisition schemes for different conditions are proposed [9,10]. On-ground demonstration of one laser-link construction has also been performed at [5,11,12]. Laser acquisition of formations containing three spacecraft is more complex. Laser acquisition schemes dedicated to three spacecraft have also been studied [13,14]. In the aspect of spacecraft dynamics modeling and control, a linear system dynamics model with 19 degrees of freedom (DOFs) has been presented at [15,16]. A detailed nonlinear dynamics model with 20 DOFs has been derived by Simone Vidano and the frequency response relationships between the different DOFs were also demonstrated [17].
The optical axis is defined by the optical bench (OB), which is fixed with respect to the OB without considering point-ahead angle mechanism and deformation. Thus there are 2 optical axes on a spacecraft. In the laser acquisition (Fig. 2), first the spacecraft A keeps pointing the reference direction. As the same time, spacecraft B controls the optical axis to continuously rotate for scanning. At the moment when the laser from spacecraft B covers spacecraft A, a signal is obtained on the Charge Coupled Device (CCD) of spacecraft A, which is used to determine the direction of spacecraft B. In the second step, spacecraft A adjusts its attitude so that the optical axis of spacecraft A is aligned with the orientation of spacecraft B, thus a signal is obtained on the CCD of spacecraft B. In the third step, spacecraft B performs the same attitude adjustment so that the optical axis is stably aligned with spacecraft A. At this point, the optical axes of two spacecraft enter each other’s field of view and the laser acquisition of one link is realized. The laser acquisition should be achieved between each two spacecraft.
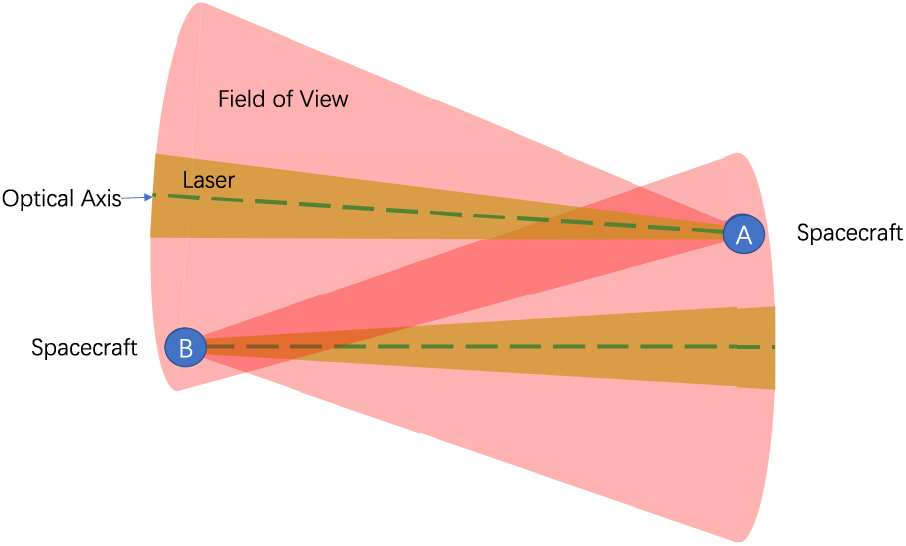
Figure 2: Laser acquisition
In Taiji program, the inter-spacecraft uncertain half-angle is 24
More researches are required to upgrade from the single laser-link to multi laser-links. Decoupling algorithms are necessary here. Due to complex spacecraft dynamics, each actuator leads to the motion of multiple degrees of freedom. Therefore, a decoupling module should be included in the control system to realize single-DOF motion by converting the motion demand of a single DOF into control signals to multiple actuators. In previous work, the 19 DOFs were assigned to three control loops as follows: drag-free control, spacecraft attitude control, and electrostatic suspension control. Each control loop contained an equal number of DOFs and driving forces (torques) [15]. For each control loop, decoupling could only happen within the current loop, having nothing to do with the other two loops.
The decoupling algorithm designed in this paper further addresses two problems. One is the degree of freedom problem. During the laser acquisition, the optical axes of two OBs on a spacecraft need to be controlled continuously and independently. 4 DOFs are needed for the two optical axes, while there are 3 DOFs in the spacecraft attitude control loop. Therefore, the spacecraft attitude control cannot achieve independent control of the optical axes. In previous work, the control and decoupling of the optical axis were only considered for the spacecraft’s attitude. Therefore, the earlier decoupling algorithms did not meet the requirements of degrees of freedom. Considering the entire MOA can be rotated by the OATM, the DOFs of the optical axis motion can be increased. Therefore the rotational torque of the spacecraft and the driving torque of OATM should be used to achieve the optical axis control.
The second is the motion coupling problem. Coupling causes noise transfer between different DOFs, so decoupling should minimize coupling between different DOFs. When a OATM operates, a torque is applied to the target MOA and a reaction torque is applied to the rest of the spacecraft. This can cause coupling problems between the optical axis motions. The rotational torque of the spacecraft can be used to offset the reaction torque of the OATM to reduce the coupling. Thus, the rotational torque of the spacecraft and the driving torque of the OATM should be put into a control loop for decoupling.
In response to the requirements of one spacecraft with two laser links in gravitational wave detection, this paper proposes the upgraded decoupling algorithms. The three control loops of the spacecraft control system are reassigned. Unlike previous work, optical axis control and decoupling in this study are not only focused on the spacecraft’s attitude but also involve Optical Assembly Tracking Mechanism. The driving torque of the OATM and the rotational torque of the spacecraft are assigned to the optical axis control loop, to achieve independent control of optical axes. The transfer function compensation method is proposed to reduce the coupling by analyzing the linear dynamics model of the spacecraft. The decoupling effect is verified by the open-loop frequency response of the decoupled system. The open-loop performance also affects the subsequent closed-loop control performance.
In Section 2, the overall control system framework is presented, the driving forces (torques) and DOFs are reassigned to the three control loops. In Section 3, the transfer function of the decoupler is given by analyzing the dynamics model and different decoupling algorithms are designed. In Section 4, the frequency response analysis of the open-loop system is performed to evaluate the effectiveness of the decoupling algorithms.
2 Control Systems and Control Loops
The spacecraft’s control system is shown in the red dashed box in Fig. 3. The controller contains 20 Single-Input Single-Output (SISO) control units. Each element of the control vector
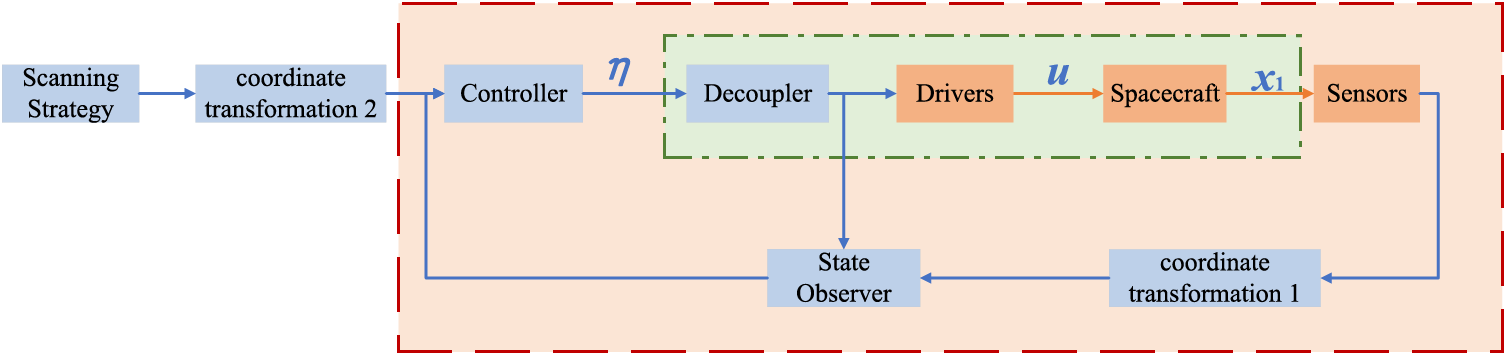
Figure 3: Gravitational wave spacecraft control system structure
CCD and Quadrant photodiodes (differential wavefront sensing, effective after attitude adjustment) [18–20] are used to measure the position of the target spacecraft. The description of the OB attitude need to be converted into the description of the spacecraft attitude and MOA turning angle relative to the nominal angle by the coordinate transformation (the relevant method can be found in the literature [21,22]). This is the coordinate transformation 1 after the sensor in the control system of Fig. 3. Scanning is required during laser acquisition, and the scanning strategy provides the maneuvering signal for the optical axis [23] that needs to be converted to control signals for spacecraft rotation and MOA rotation. Then they are provided to the controller. This is coordinate transformation 2 after the scanning strategy.
During the laser acquisition, if one spacecraft has already established one laser link, the established laser link is kept while establishing another laser link, and then the other optical axis is controlled for scanning or alignment. The optical axes of both OBs of one spacecraft needed to be controlled independently (4 DOFs are required). The DOFs controlled by the optical axis control loop should include 3 DOFs of the spacecraft attitude and the rotation angle of the MOA. The driving torque of the optical axis control loop should include the spacecraft rotational torque and the driving torque of the OATM. The spacecraft rotational torque and the driving torque of the OATM need to be collaboratively controlled and jointly decoupled in the optical axis control loop. Therefore, the spacecraft control system is divided into three control loops: drag-free control, optical axis control and electrostatic suspension control. The DOFs and driving forces and torques in each control loop are listed in the Table 1.

In this paper, we use MATLAB Simscape to build the nonlinear dynamics model of the spacecraft in Fig. 3, and the schematic diagram of the simscape model is as follows Fig. 4.

Figure 4: The schematic diagram of the gravitational wave spacecraft dynamics model
For the dynamics model, the input vector


Therefore, a 20 * 20 Multiple-In Multiple-Out (MIMO) system is used in this paper. After the start of the drag-free control, only 3 of the 6 DOFs translational forces on the TM will be used, and the other 3 directions will be tracked by driving the spacecraft translations without applying electrostatic forces.
3.2 Transfer Function of Decoupler
After obtaining the the spacecraft nonlinear dynamics model, the state space equation can be obtained by the linearization at the working point, and the initial working point is selected as
The state space equation is obtained as
where
Decomposing
It can be written as two equations,
Substituting Eq. (3) into Eq. (4),
Perform Laplace transform,
The transfer function of driving forces (torques) to DOFs is
For the decoupler, the input is the control signal of DOFs
The transfer function of the decoupler and spacecraft dynamics model is
It can be seen that the transfer function compensation is performed when use Eq. (5) to decouple, in this way the decoupler and the spacecraft dynamics model present the dynamics of the second-order integral within a certain range.
In the previous decoupling design, there are only scale factors in the transfer function of the decoupler,
The above
Each decoupling algorithm can be divided into two parts. One is the transfer function, which can be
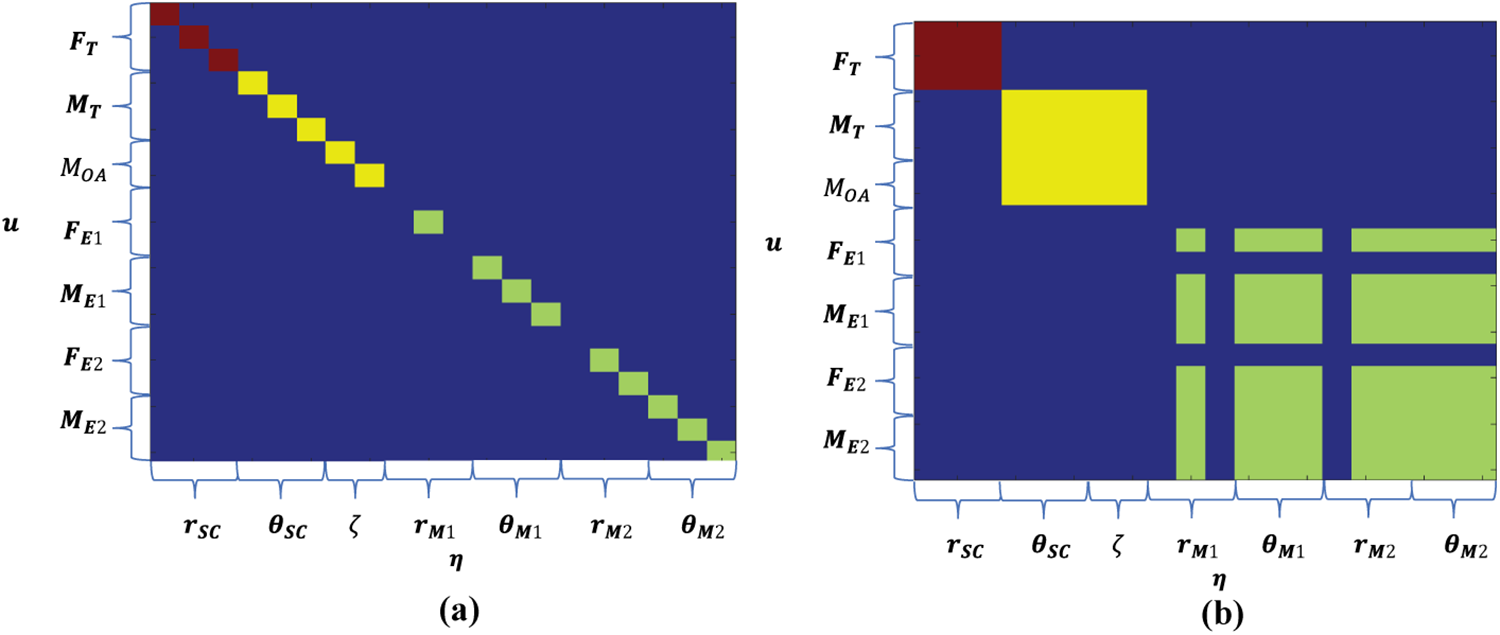
Figure 5: Input control vector of the decoupler
Decoupling algorithm I: Only one driving force (torque) will be used to control one DOF. The input (DOF to be controlled) and output (driving force and torque) distribution of the decoupler can be represented in (a) in Fig. 5, with the transfer function using
Decoupling algorithm II: Decoupling is performed within each control loop so that the driving forces (torques) within corresponding control loop are used to control one DOF. The input and output distribution of the decoupler is represented in (a) in Fig. 5. The missing rows and columns in the electrostatic suspension control are the 3 DOFs used for drag-free control. The transfer function is
Decoupling algorithm III: Decoupling is performed within each control loop (Fig. 5). The transfer function is
The decoupling effect can be evaluated by analyzing the open-loop frequency response of the decoupler and the spacecraft dynamics model represented in Fig. 4. It corresponds to Fig. 3 to the part inside the green dotted box, ignoring the characteristics of the drivers. The effect of decoupling is evaluated by the frequency response of the input vector

Figure 6: Open-loop system used for frequency response simulation
Fig. 7 is the frequency response at 1 Hz of the input vector
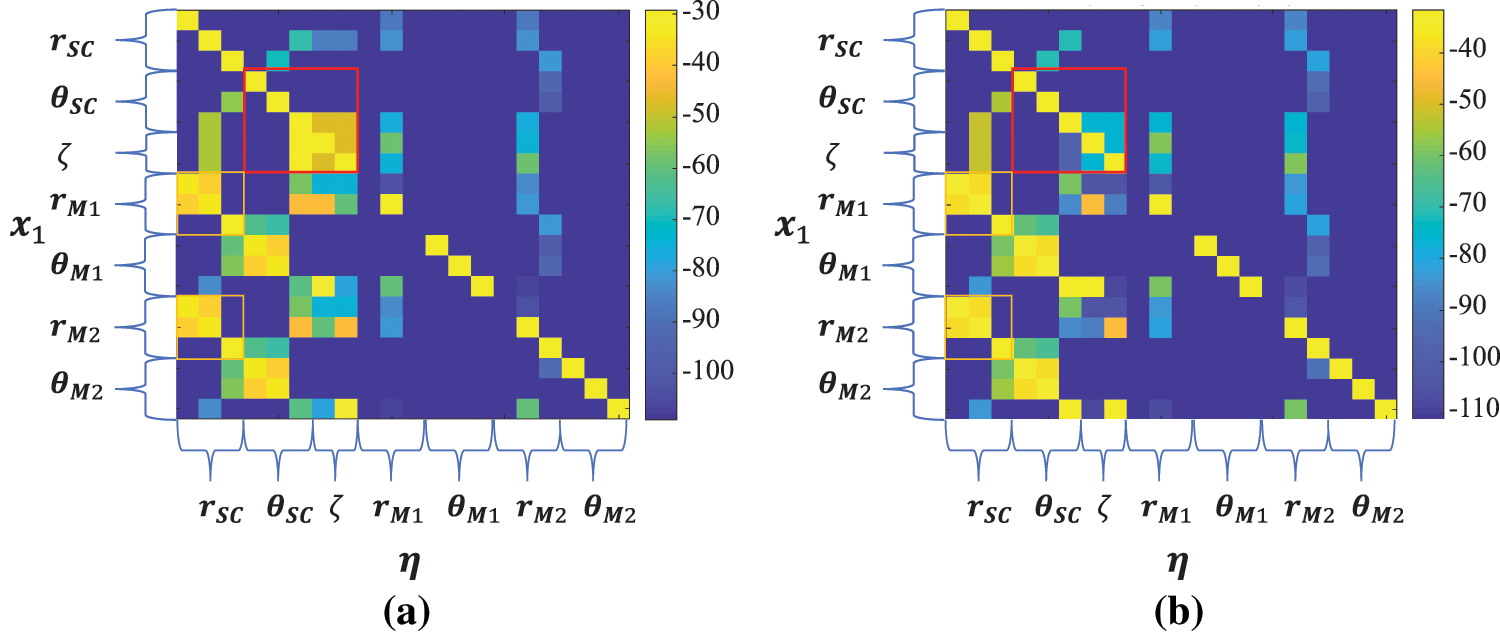
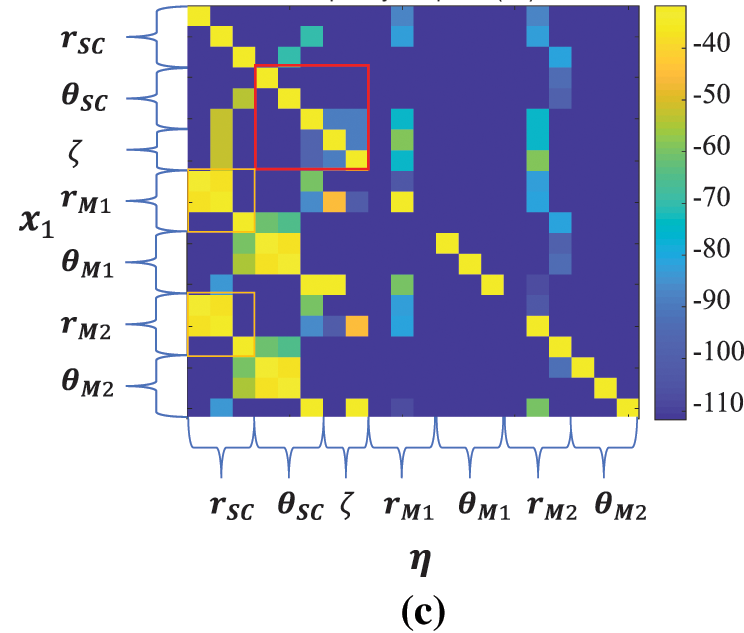
Figure 7: The frequency response at 1 Hz of the input vector
Table 4 records the maximum frequency response between different DOFs in optical axis control, i.e., unwanted motion coupling, and a smaller frequency response means a better decoupling effect.

The frequency response at 1 Hz is analyzed first (Fig. 7). It can be seen that the decoupling algorithms II and III significantly reduce the coupling in the optical axis control. The decoupling algorithm II effectively reduces the coupling by offsetting the reaction torque of the OATM. Decoupling algorithm III also reduces the coupling in the optical axis control. For most DOFs, the dynamics of the system are second-order integrated without stiffness and damping, but for OATM, stiffness and damping exist. The collaborative motion produces errors due to different dynamics properties. The transfer functions compensation is used to modify the dynamics of OATM to a second-order integral model in decoupling algorithm III, thus reducing the motion coupling. For the coupling of other DOFs, the algorithms II and III are basically the same as the decoupling algorithm I.
At the higher frequency point of 10 Hz (Fig. 8), the decoupling algorithms II and III still effectively reduce coupling. However, the difference between the decoupling algorithms II and III has diminished. At the lower frequency of 0.01 Hz, the decoupling algorithm II shows a deterioration compared to the decoupling algorithm I. The decoupling algorithm III still effectively reduces coupling. The main reason is that, in the low-frequency range, the frequency response of DOFs with second-order integrator characteristics (without damping and stiffness) far exceeds that of DOFs with damping and stiffness. Decoupling algorithm III addresses this issue through transfer function compensation. However, in practical usage, the performance may not be as ideal due to the limitation imposed by actuator resolution.

Figure 8: The frequency response of the input vector
In addition, the transfer function compensation method is also meaningful in cases where the output of the driver is the angle of rotation rather than the torque. This method can also be used to solve the problem of different units of input variables.
During the laser acquisition, the optical axes on a spacecraft need to be controlled independently. This imposes different decoupling requirements on the control system. The decoupling algorithm is divided into two parts, control loop assignment and transfer function design. In order to achieve independent control of the optical axes, the DOFs and the driving forces are reassigned to the three control loop. The sufficient freedom of optical axis motion is achieved by introducing the driving torque of OATM. The coupling problem due to reaction torque is reduced by decoupling in one control loop. The transfer function compensation method is used to reduce the coupling due to the different dynamics of the drivers. The open-loop simulation demonstrates that the decoupling algorithm significantly reduces the coupling of the optical axis. The decoupling algorithm addressed the motion coupling issue from a single laser link to a dual laser link on one spacecraft.
Acknowledgement: The authors are thankful to the anonymous reviewers for improving this article.
Funding Statement: This work was supported by the National Key Research and Development Program of China (2022YFC2203700).
Author Contributions: The authors confirm contribution to the paper as follows: analysis and discussion: Xue Wang, Xingguang Qian, Jinke Yang; study conception and design: Xue Wang; draft manuscript preparation: Xue Wang, Yikun Wang, Weizhou Zhu, Zhao Cui; management and coordination: Jianjun Jia. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data and related programs are available from the first and corresponding authors upon reasonable request.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Amaro-Seoane, P., Audley, H., Babak, S., Baker, J. et al. (2017). Laser interferometer space antenna. A proposal in response to the ESA call for L3 mission concepts. https://arxiv.org/abs/1702.00786 [Google Scholar]
2. Luo, Z., Wang, Y., Wu, Y., Hu, W., Jin, G. (2020). The Taiji program: A concise overview. Progress of Theoretical and Experimental Physics, 2021(5), 05A108. https://doi.org/10.1093/ptep/ptaa083 [Google Scholar] [CrossRef]
3. Mei, J., Bai, Y. Z., Bao, J., Barausse, E., Lin, C. et al. (2020). The TianQin project: Current progress on science and technology. Progress of Theoretical and Experimental Physics, 2021(5), 05A107. https://doi.org/10.1093/ptep/ptaa114 [Google Scholar] [CrossRef]
4. Qiao, D., Zhou, X., Li, X. (2023). Feasible domain analysis of heliocentric gravitational-wave detection configuration using semi-analytical uncertainty propagation. Advances in Space Research, 72(10), 4115–4131. https://www.sciencedirect.com/science/article/pii/S0273117723006300 [Google Scholar]
5. Gao, R., Wang, Y., Cui, Z., Liu, H., Liu, A. et al. (2023). On-ground demonstration of laser-link construction for space-based detection of gravitational waves. Optics and Lasers in Engineering, 160, 107287. [Google Scholar]
6. Zhu, W., Guo, Y., Jin, Q., Wang, X., Qian, X. et al. (2023). Measurement of the optical path difference caused by steering mirror using an equal-arm heterodyne interferometer. Photonics, 10(12), 1365. https://www.mdpi.com/2304-6732/10/12/1365 [Google Scholar]
7. Vidano, S., Novara, C., Pagone, M., Grzymisch, J. (2022). The LISA DFACS: Model Predictive Control design for the test mass release phase. Acta Astronautica, 193, 731–743. https://www.sciencedirect.com/science/article/pii/S0094576521007025 [Google Scholar]
8. Ira Thorpe, J., Stebbins, R. (2010). Preliminary investigations of an optical assembly tracking mechansim for LISA. 38th COSPAR Scientific Assembly, vol. 38. Bremen, Germany. [Google Scholar]
9. Wuchenich, D. M. R., Mahrdt, C., Sheard, B. S., Francis, S. P., Spero, R. E. et al. (2014). Laser link acquisition demonstration for the grace follow-on mission. Optics Express, 22(9), 11351–11366. [Google Scholar] [PubMed]
10. Gao, R. H., Liu, H. S., Luo, Z. R., Jin, G. (2019). Introduction of laser pointing scheme in the taiji program. Chinese Optics, 12(3), 425–431. [Google Scholar]
11. Sanjuan, J., Gohlke, M., Rasch, S., Abich, K., Görth, A. et al. (2015). Interspacecraft link simulator for the laser ranging interferometer onboard grace follow-on. Applied Optics, 54(22), 6682–6689. [Google Scholar] [PubMed]
12. Wang, Y. K., Meng, L. Q., Xu, X. S., Niu, Y., Qi, K. Q. et al. (2021). Research on semi-physical simulation testing of inter-satellite laser interference in the China Taiji space gravitational wave detection program. Applied Sciences, 11(17), 7872. [Google Scholar]
13. Maghami, P. G., Hyde, T. T., Kim, J. (2005). An acquisition control for the laser interferometer space antenna. Classical and Quantum Gravity, 22(10), S421. [Google Scholar]
14. Cirillo, F., Gath, P. F. (2009). Control system design for the constellation acquisition phase of the LISA mission. Journal of Physics: Conference Series, 154(1), 012014. [Google Scholar]
15. Gath, P., Schulte, H. R., Weise, D., Johann, U. (2007). Drag free and attitude control system design for the LISA science mode. AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, South Carolina, USA. https://doi.org/10.2514/6.2007-6731 [Google Scholar] [CrossRef]
16. Cirillo, F. (2007). Controller design for the acquisition phase of the LISA mission using a Kalman filter (Ph.D. Thesis). University of Pisa, Italy. [Google Scholar]
17. Vidano, S., Novara, C., Colangelo, L., Grzymisch, J. (2020). The LISA DFACS: A nonlinear model for the spacecraft dynamics. Aerospace Science and Technology, 107, 106313. [Google Scholar]
18. Wanner, G., Heinzel, G., Kochkina, E., Mahrdt, C., Sheard, B. S. et al. (2012). Methods for simulating the readout of lengths and angles in laser interferometers with gaussian beams. Optics Communications, 285(24), 4831–4839. [Google Scholar]
19. Hechenblaikner, G. (2010). Measurement of the absolute wavefront curvature radius in a heterodyne interferometer. Journal of the Optical Society of America A, 27(9), 2078–2083. [Google Scholar]
20. Luo, Z., Gao, R., Liu, H., Jin, G. (2020). Linearity performance analysis of the differential wavefront sensing for the taiji programme. Journal of Modern Optics, 67, 383–393. [Google Scholar]
21. Houba, N., Delchambre, S., Ziegler, T., Hechenblaikner, G., Fichter, W. (2022). Lisa spacecraft maneuver design to estimate tilt-to-length noise during gravitational wave events. Physical Review D, 106, 022004. [Google Scholar]
22. Houba, N., Delchambre, S., Ziegler, T., Fichter, W. (2022). Optimal estimation of tilt-to-length noise for spaceborne gravitational-wave observatories. Journal of Guidance, Control, and Dynamics, 45(6), 1078–1092. https://doi.org/10.2514/1.G006064 [Google Scholar] [CrossRef]
23. Ales, F., Gath, P., Johann, U., Braxmaier, C. (2015). Line of sight alignment algorithms for future gravity missions. AIAA Guidance, Navigation, and Control Conference, Kissimmee, Florida, USA. https://doi.org/10.2514/6.2015-0094 [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools