
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

A Review on Emerging Unified Information–Physics Frameworks for Structural Design: Toward Topology Optimization Informatics
1 School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou, China
2 National Engineering Research Center of Novel Equipment for Polymer Processing, Key Laboratory of Advanced Manufacturing Technology for Polymers (South China University of Technology), Ministry of Education, South China University of Technology, Guangzhou, China
3 Duy Tan Research Institute for Computational Engineering (DTRICE), Duy Tan University, 6 Tran Nhat Duat, Tan Dinh ward, Ho Chi Minh City, Vietnam
4 Faculty of Civil Engineering, Duy Tan University, Da Nang City, Vietnam
5 Meituan Academy of Robotics Shenzhen, Shenzhen, China
* Corresponding Authors: Weihua Li. Email: ; Yingjun Wang. Email:
(This article belongs to the Special Issue: Topology Optimization: Theory, Methods, and Engineering Applications)
Computer Modeling in Engineering & Sciences 2026, 147(1), 4 https://doi.org/10.32604/cmes.2026.079830
Received 05 February 2026; Accepted 23 March 2026; Issue published 27 April 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
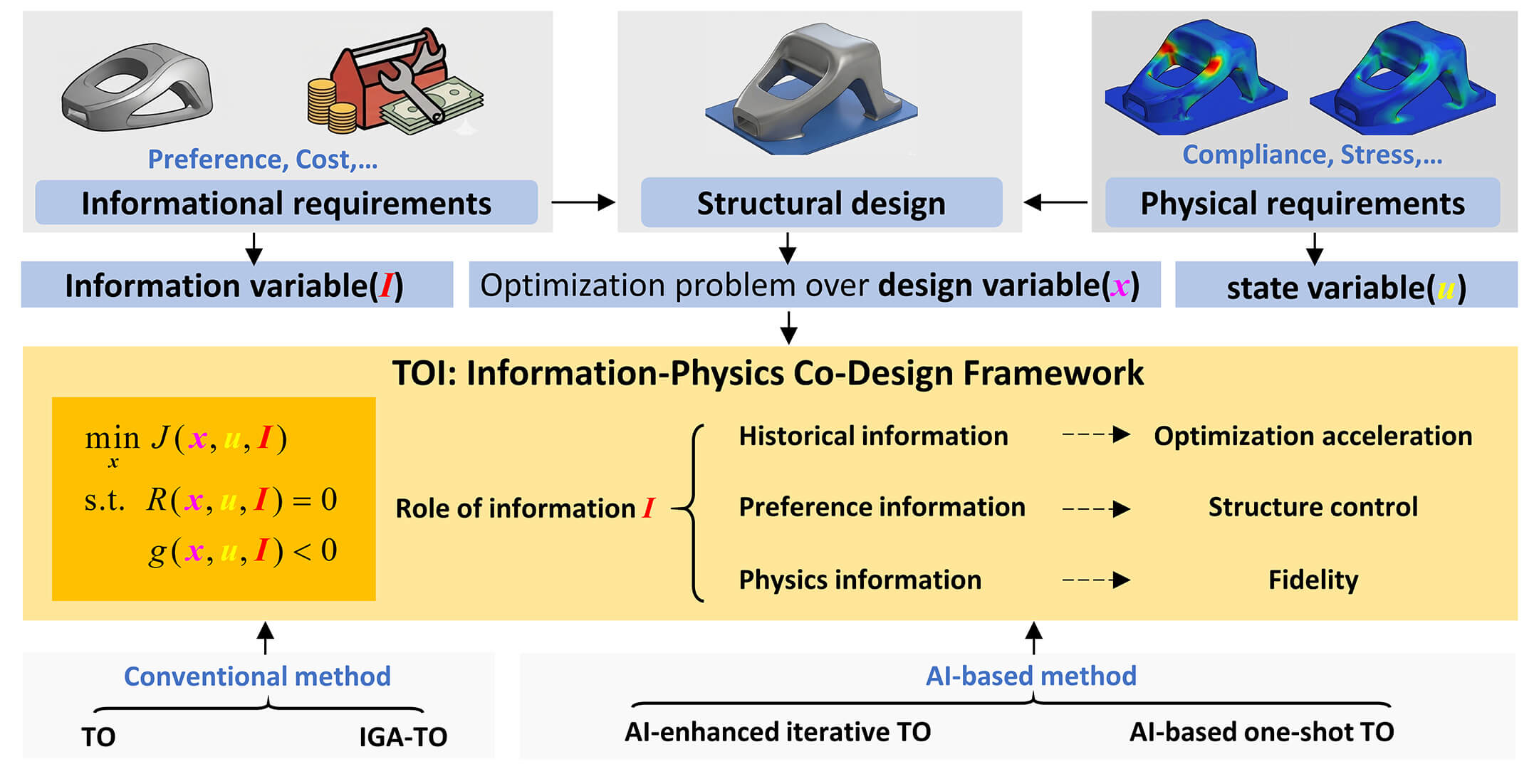
Topology optimization (TO) has become a core computational paradigm for structural design by defining optimality through physics-based objectives and constraints. However, practical engineering design often involves incomplete and imperfect physical modeling due to multi-physics coupling, manufacturing uncertainty, and computational constraints, leaving critical design factors insufficiently captured in purely physics-driven formulations. In parallel, data-driven and generative methods have enabled rapid topology generation and intent-aware design exploration, yet often weaken explicit optimality guarantees. This review argues that these seemingly divergent developments can be organized under a unified information–physics perspective. We term this emerging field Topology Optimization Informatics (TOI): optimal structural design is obtained through the joint modeling and optimization of physical laws and design-relevant information. We first summarize the integration of artificial intelligence (AI) and TO into two major paradigms: AI-based one-shot TO, which learns mappings or distributions of near-optimal designs from data and prioritizes fast generation and diversity, and AI-enhanced iterative TO, which embeds learning-based modules into the classical solver-in-the-loop pipeline while keeping the underlying governing equations unchanged. Finally, we show that traditionally separate tasks—design control, computational acceleration, and fidelity enhancement—can be interpreted as different manifestations of information–physics co-modeling within a single optimization framework, thereby clarifying their connections and design implications and outlining opportunities for semantic- and data-enabled next-generation structural design.Graphic Abstract
Keywords
Over the past several decades, scientific research and engineering practice have undergone a sequence of paradigm shifts, evolving from empirical observation and theoretical deduction to computational science, and more recently toward data-intensive discovery. According to Jim Gray’s classification [1], many engineering domains are situated at the intersection of the third paradigm (computational, physics-based modeling) and the fourth paradigm (data-driven and information-centric discovery). Structural design occupies a distinctive position within this transition. On the one hand, it must rigorously satisfy physical laws and governing equations, which characterizes third-paradigm modeling. On the other hand, modern structural design is increasingly driven by information-rich requirements, including functional intent, manufacturability, cost, reliability, and accumulated design experience, which follows the fourth paradigm. As a result, structural design naturally emerges as a bridge problem at the intersection of physics-based computation and information-centric discovery, where neither paradigm alone is sufficient to fully characterize optimal design.
Structural optimization combines computational mechanics with optimization methods to enable systematic and performance-driven structural design. Among its various formulations, topology optimization (TO) [2] is regarded as one of the most influential approaches, as it allows free exploration of structural configurations within a prescribed design domain without assuming an initial layout. Owing to this generality and efficiency, TO has been extensively adopted in aerospace [3–5], automotive [6–8], advanced manufacturing industries [9–12], architecture [13,14] and carbon footprint [15–18]. Among these methods, some focus exclusively on achieving high physical performance, while others incorporate various subjective factors; together, they provide a rich set of approaches for engineering design (Fig. 1). Although performance improvements and application extensions of TO have been widely discussed, its influence on the modeling of structural design itself has received less attention. From a broader methodological perspective, the development of TO can be interpreted as a gradual process in which the structural design workflow itself becomes increasingly formalized and computationally modeled.

Figure 1: Comparison between preference-driven and performance-driven structural design. Preference-driven design examples (a–c): wheel design, tall building design, and conceptual chair design [19–21]. Performance-driven design examples (d–f): aircraft structure, mandibular prosthesis scaffold, and rocket engine [3,22,23].
In early TO frameworks, engineering design was implicitly modeled through a staged CAD–CAE pipeline [24]. Geometric modeling and physics-based analysis were treated as separate steps, and design improvement was achieved through repeated human-in-the-loop iterations between geometry modification and performance evaluation. While effective in practice, this separation leads to well-known issues such as geometry–analysis inconsistency, repeated remeshing, and limited ability to directly encode design intent into the optimization process. To address these limitations, isogeometric analysis (IGA) was introduced as a unifying framework in which the same spline-based representations are used for both geometry and analysis. Its extension to TO, known as IGA-TO [25–28], marked an important conceptual shift: design representation and physical analysis were no longer loosely coupled but jointly embedded within a single computational model. From a design perspective, IGA-TO represents an important step toward modeling not only individual design stages in a unified manner, but also their coupling within a single mathematical framework.
With the rapid adoption of artificial intelligence (AI), TO is no longer confined to purely physics-centered computational design. Learning-based representations and data-informed models are increasingly incorporated into the design loop, giving rise to AI-aided TO, generative design, and inverse design paradigms. AI-aided design [29–32] methods can generate informed prior geometries that reflect human requirements, substantially reducing manual effort during early-stage design exploration. Generative design approaches further enable the efficient production of diverse candidate structures, facilitating the exploration of unconventional and innovative design solutions. From a design perspective, the integration of AI with TO represents a further decisive step toward the systematic coupling of design information and geometric construction within a unified computational design framework.
From the viewpoint of engineering design theory, the design process is commonly decomposed into several interrelated stages, including requirement specification, geometric representation, physical analysis, and post-processing. The evolution of TO can be understood through this lens. IGA-TO contributes to the unification of geometric modeling and physical analysis by enforcing design–analysis consistency, while AI-aided and AI-integrated TO approaches increasingly couple design requirements and preference information with geometric construction. Taken together, these developments reveal a clear trend toward the progressive integration of the entire design workflow, in which requirements, representations, and physical evaluations are no longer treated as isolated components, but are instead embedded within increasingly unified computational frameworks. In summary, TO has evolved from ensuring design–analysis consistency toward achieving intent–realization consistency (Fig. 2).

Figure 2: Structural design evolves from separate stages toward a unified representation, such as AI-aided design and IGA-TO. TOI shifts structural design from stage-wise processing to a unified representation by modeling the design itself.
In this review, we refer to this emerging trend as Topology Optimization Informatics (TOI). TOI does not denote a single method or established theory, but rather a unifying perspective that views TO as an information–physics integrated framework for structural design. Under this perspective, optimal structures are obtained through the systematic modeling and co-optimization of physical laws and design-relevant information. TO is thus interpreted as evolving from a physics-centered computational tool into a broader design paradigm, capable of supporting demand-oriented and increasingly fully modeled structural design processes. The novelties of this review paper can thus be summarized as follows:
• A new field termed as TOI is defined as the joint modeling and optimization of physical laws and design-relevant information.
• It moves beyond merely integrating individual design states modeling optimal structural design itself as a unified object. It shifts the focus from achieving design–analysis consistency to intent–realization consistency.
• A central novelty is the development of a unified information–physics optimization formulation (Eq. (5)), which treats information variables as co-determining factors of optimal design alongside physical design variables and state variables.
• The framework explicitly incorporates historical data, user preferences (images, text, sketches), and real-world constraints directly into the optimization loop. This allows for meaningful design even when physical processes are only partially modeled.
• The TOI provides a coherent view that bridges traditionally isolated tasks—such as computational acceleration, design control, and fidelity enhancement—interpreting them as different manifestations of the same information–physics co-modeling principle.
• It introduces the perspective of constructing a high-dimensional manifold where information acts as an intrinsic coordinate that interacts with physical states to shape the geometry of the admissible design space.
• It highlights an operational convergence where information and physics play comparable functional roles as operators or constraints, bridging the third paradigm (physics-driven) and fourth paradigm (data-driven) of scientific discovery.
To illustrate the evolutionary trajectory of topology optimization in the era of artificial intelligence—from purely physics-based formulations, to AI-enhanced modules targeting localized tasks such as acceleration and control, and ultimately toward comprehensive information–physics integration—the remainder of this review is organized as follows. First, classical TO methods are briefly reviewed to establish the physical foundations of structural optimization in Section 2. Next, emerging approaches that integrate TO with AI are surveyed and categorized in Section 3. The concept and framework of TOI are then introduced as a unifying perspective that connects these developments in Section 4. Based on this framework, key features and emerging opportunities enabled by information–physics unification are discussed in Section 5. Finally, conclusions and future research directions are presented in Section 6.
2 Topology Optimization Methods
In TO, optimal design is formulated as a performance-driven optimization problem subject to physical constraints [2]. The objective is to determine an optimal material distribution that maximizes or minimizes a prescribed structural performance metric under given loads, boundary conditions, and material constraints. As a representative example of the third paradigm, TO defines optimality entirely in a physical sense, and design activity is primarily expressed as the formal mapping of design intent and requirements into computable objective functions, constraints, and governing equations.
Mathematically, a generic TO problem can be written as:
where
The origin of TO can be traced back to Michell’s pioneering work on optimal truss structures [33], which established fundamental limits on material efficiency under given loads. The first general numerical framework for TO was later developed by Cheng and Olhoff for elastic plates [34], where the material distribution problem was transformed into an equivalent microstructural sizing problem. This idea enabled continuous optimization techniques to be applied to originally discrete 0–1 material layout. Building on this foundation, Schmit integrated mathematical programming with the FEM, establishing a computational framework capable of handling complex geometries and loading conditions. A decisive milestone in the formal development of TO was achieved by Bendsøe through the homogenization method [35], which replaced the discrete material distribution problem with a continuous optimization of equivalent microstructural properties. This approach marked the formal birth of modern TO and laid the groundwork for a wide range of subsequent methods. Since then, several representative approaches have been proposed, including density-based methods such as the Solid Isotropic Material with Penalization (SIMP) [36], evolutionary methods such as Evolutionary Structural Optimization (ESO) [37] and Bidirectional ESO (BESO) [38], boundary-based methods such as the level-set method [39–41], and explicit geometry approaches such as the Moving Morphable Components (MMC) framework [42,43]. (Fig. 3) Although these methods differ in geometric representations and optimization strategies, they all ultimately conform to the same optimization formulation in Eq. (1), in which optimal design is defined through explicit physical objectives, governing equations, and constraint enforcement.

Figure 3: Topology optimization is a physics-driven optimal design method, and four representative approaches are shown.
Classical TO faces several intrinsic challenges associated with its iterative, density- or boundary-based formulation. From a computational perspective, the repeated solution of large-scale finite element systems and sensitivity analyses leads to high computational cost, which has motivated extensive research on improving computational efficiency, such as advanced numerical solvers [44], parallelization strategies [45,46], and hardware acceleration [47,48]. In addition to efficiency issues, density-based methods often suffer from numerical artifacts such as checkerboard patterns, gray-scale elements, and mesh dependency, which necessitate filtering, projection, and post-processing techniques to obtain physically meaningful and manufacturable designs. Furthermore, although TO naturally allows complex structural layouts to emerge, practical applications often require explicit control over topological features such as the number of holes [49,50], connectivity [51], and minimum feature size [52,53]. These efforts are primarily concerned with developing more efficient means to obtain solutions to a physics-defined optimal design problem, within a modeling framework that is fixed a priori by the chosen tools and formulations.
Beyond its methodological challenges, TO has been extensively extended to a wide range of physical scenarios, demonstrating its generality as a physics-driven optimization framework. Originally developed for linear elastic structures, TO has since been applied to nonlinear mechanics [54,55], multi-material systems [56], and microstructural design [57]. Moreover, it has been successfully generalized to various multi-physics problems, including thermal conduction [58], fluid flow [59], hyperelastic materials [60], frictional contact problem [61,62], and electromagnetic system [63]. In the context of mechanical metamaterials [64], TO provides a powerful tool for tailoring effective material properties through microstructural design. These extensions highlight that the core strength of TO lies in its ability to encode and exploit governing physical laws across diverse domains, reinforcing its characterization as a fundamentally physics-based optimization paradigm.
In summary, classical TO has achieved remarkable success by recasting design problems as physics-constrained optimization tasks and identifying optimal design with physically optimal solutions. Building upon traditional manual design practices, this framework introduces computational mechanics as a central driving force, substantially advancing engineering design methodologies and laying the foundation for subsequent paradigm evolution in design.
AI is widely regarded as a representative of the fourth paradigm of scientific discovery. The integration of AI with TO has significantly improved the efficiency of TO-based design workflows and extended their application scope [29,65–67]. In general, the fusion of AI and TO can be categorized into two main approaches: AI-based one-shot TO [68] and AI-enhanced iterative TO [29]. The former reformulates TO as a probabilistic learning problem to enable end-to-end design generation according to the given dataset, while the latter follows the classical physics-driven optimization framework and incorporates learning-based components to enhance performance and applicability. Representative network architectures are illustrated in Fig. 4.

Figure 4: AI-enhanced iterative TO iteratively optimizes geometric topology representations, where optimal designs are searched within a predefined geometric space; AI-based one-shot TO learns a distribution of high-quality structures via network parameters, from which optimal structures can be approximated through sampling.
Following a statistical learning paradigm, AI-based one-shot TO can be formulated as follows:
where
The dataset consists of near-optimal designs, which are typically generated by classical TO and satisfy the prescribed physical governing equations and boundary conditions.
Within this framework, optimal designs are derived from the analysis and recombination of existing design data, rather than from explicit physics-based optimization. Owing to the fact that neural network inference is significantly faster than finite element analysis, and that design candidates are generated through probabilistic sampling, AI-based one-shot TO offers notable advantages in terms of computational efficiency and design diversity [69]. However, in practice, the acquisition of high-quality design data is often expensive and limited. Under such data-scarce conditions, issues related to performance degradation, limited generalization to unseen scenarios, and weak physical interpretability are frequently attributed to insufficient expressive capacity of neural network models, dataset shift, boundary condition variability, and constraint satisfaction [70]. Consequently, a substantial body of research has focused on improving structural generation performance by enhancing network expressiveness. Early studies primarily relied on predictive or discriminative models, while subsequent efforts have increasingly adopted generative models, such as generative adversarial networks (GAN) [71,72] and diffusion models (DM) [69,73–75], Kolmogorov-Arnold Network (KAN) [76]. Reinforcement learning (RL) [77–79], graph neural networks (GNN) [80,81], and implicit representations [82,83] have also been widely regarded as promising architectures due to their ability to model sequential design processes and complex relational structures (Fig. 5).

Figure 5: AI-based one-shot topology optimization requires neural models with strong expressive capacity, such as GANs [84], diffusion models [69], GNNs [77], RL [77], and KAN [76]. The evolution of learning and representation capabilities in neural networks therefore constitutes a key driving force for advancing one-shot topology optimization.
As implied by Eq. (2), AI-based one-shot TO incorporates physical information into neural networks primarily through the training dataset, where physical feasibility is implicitly encoded in the data distribution. In addition, physical knowledge can be introduced explicitly by designing network architectures or loss functions that embed physical principles. For example, Yoo et al. [85] developed a GAN-based wheel design framework, in which two-dimensional geometric representations are directly coupled with three-dimensional CAE analyses. In this framework, the generated 2D designs are evaluated not only based on geometric features but also with respect to the global mechanical performance of the corresponding 3D skeletal structures, thereby incorporating three-dimensional physical constraints into the learning process. Nevertheless, in most one-shot approaches, physical consistency is not strictly guaranteed during inference, but rather encouraged through data-driven regularization or soft constraints.
Beyond rapid modeling and reproduction of existing designs, AI-based one-shot TO has also expanded the practical capabilities of TO by enabling efficient design exploration. For example, large-scale predictive models for mechanical metamaterials can be used to rapidly identify promising candidates from vast design spaces [86], while simultaneously providing multiple feasible alternatives for subsequent combinatorial or hybrid design. Qian and Li propose a Fourier and latent modulated neural network, in which human design intent and high-performance design data are embedded into a shared latent space, enabling intent-aware and physically consistent TO [87]. In this sense, AI-based one-shot approaches primarily enhance the exploration and reuse of design knowledge, rather than directly replacing physics-based optimality guarantees.
AI-enhanced iterative TO improves the efficiency and extensibility of classical TO by embedding AI into the iterative optimization pipeline (Fig. 6). Given the rich algorithmic structure of TO, such as geometric representations, finite element analysis, and numerical optimization, many AI-enhanced iterative approaches operate at the algorithmic core of TO. These methods specifically target long-standing obstacles that are difficult to address within the third-paradigm, physics-driven framework, including high computational cost, limited scalability, and restricted design diversity. By introducing learning-based components into selected stages of the TO workflow, AI-enhanced iterative TO has achieved substantial improvements in computational efficiency, robustness, and design diversity, while preserving the underlying physics-based formulation of optimality.
where

Figure 6: AI-enhanced TO enhances topology optimization by introducing learning-based components into individual optimization stages, enabling improved efficiency or robustness without altering the fundamental physics-based optimization framework. Implicit representation enhancement [88], Substructure calculation enhancement [89], and Optimization convergence enhancement [90].
In AI-enhanced iterative TO, the most representative approach is surrogate models. A classical TO workflow typically consists of several key stages, including geometric representation, parameter initialization, FEM, sensitivity evaluation, and iterative optimization updates. Learning-based surrogates have been introduced at nearly all of these stages. For example, neural implicit representations have been employed for geometry construction, data-driven design priors have been used to replace random initialization [91,92], neural networks have been developed to approximate finite element responses or accelerate matrix operations within FEM, and learning-based models have been used to directly predict sensitivities [93] or update directions. In addition, learning-based optimizers have been explored as alternatives to traditional constrained optimization solvers. Collectively, these approaches aim to approximate or replace computationally expensive and repetitive components in the TO pipeline while retaining the overall iterative structure.
Although computational efficiency remains one of the primary performance metrics in TO, AI-enhanced iterative TO has also been leveraged to improve other important properties, such as fidelity [69,94], optimization stability [95,96], and convergence behavior [97]. Different TO formulations exhibit distinct strengths and weaknesses—for instance, density-based methods are prone to checkerboard patterns, while boundary-based methods often suffer from slow convergence. Learning-based enhancements enable targeted improvements by addressing method-specific limitations. As a result, AI-enhanced iterative TO contributes to a more comprehensive improvement of optimization performance beyond raw computational speed.
Beyond algorithmic performance gains, AI-enhanced iterative TO also extends the practical applicability of physics-based TO to more challenging physical scenarios. By alleviating the computational burden of high-fidelity simulations [98] and enhancing numerical stability, learning-based surrogates make it feasible to tackle large-scale [99], high-resolution [100,101], strongly nonlinear [102,103], and multi-physics optimization problems that are difficult to handle using classical TO alone. These include problems involving complex material behavior, coupled thermo-fluid-mechanical systems, and three-dimensional structures with fine geometric features. In this sense, AI-enhanced iterative TO expands the range of physical problems accessible to TO, while preserving its underlying physics-driven formulation of optimality.
4 Topology Optimization Informatics
4.1 From Design Integration to Optimal Design Modeling
The development of TO reflects a gradual trend toward embedding increasing parts of the structural design process into formal mathematical and computational frameworks. Representative advances illustrate this tendency from different perspectives. IGA-TO establishes a tighter coupling between geometric representation and physical analysis by enforcing design–analysis consistency within a unified formulation. More recently, the integration of AI with TO has further connected design requirements with geometric construction, enabling data-informed representations of design intent to enter the optimization loop. Importantly, these advances signal more than improved algorithmic integration. They indicate a paradigm shift in what is being modeled. Rather than focusing solely on integrating individual stages of the design workflow, recent developments increasingly point toward the need to model optimal structural design itself as a unified object.
In the traditional CAD–CAE workflow, the optimal structure is implicitly defined through human–machine interaction, where designers iteratively modify geometric models and evaluate performance via analysis tools. In TO the optimal structure is treated as the solution to a well-defined physics-based optimization problem, governed by objective functions and constraints. Generative design [65] reframes the problem as a selection process over a large set of automatically generated candidates, while AI-aided design [29] largely inherits the CAD–CAE paradigm and focuses on improving efficiency through intelligent assistance (Table 1). Although these paradigms differ in tools and representations, they share a common but often implicit assumption about what constitutes “optimality” and how it should be discovered within a given framework. This naturally raises a fundamental question: can optimal design itself be modeled directly, rather than being inferred indirectly through specific tools and methods?

From a more fundamental standpoint, structural designs can be understood as being governed by two inseparable components: physics and information. Physics defines the feasibility and performance of structures through governing equations, constitutive relations, and boundary conditions. These components form the foundation of physics-based optimization. In principle, an optimal design would require a complete and accurate modeling of the entire physical process underlying structural behavior. However, in practical engineering design, such complete physical modeling is often infeasible due to complex geometries, multi-physics coupling, scale separation, manufacturing uncertainties, and limited computational budgets. As a result, purely physics-based formulations may provide an incomplete or overly idealized description of the design space, leaving important details of the design process underrepresented. Information, in contrast, encapsulates requirements, preferences, historical design knowledge, functional intent, manufacturability constraints, cost considerations, and implicit human expertise. Rather than replacing physical models, information acts as a complementary component that compensates for aspects of the design process that are difficult to fully capture through governing equations alone. TOI is introduced in this review to denote a unified information–physics optimization perspective, in which optimal structural design is obtained through the joint modeling and optimization of physical laws and information requirements. In this framework, information is explicitly coupled with physics within a unified formulation, enabling meaningful design optimization even when parts of the physical process are only partially modeled [115,120]. Consequently, optimal designs can be systematically explored that are both physically admissible and consistent with design intent and practical requirements.
4.2 Unified Process and Formulation of Topology Optimization Informatics
The unified information–physics framework of TOI can be summarized as three tightly coupled stages (Fig. 7): unified information–physics representation, unified information–physics modeling, and unified information–physics optimization. By modeling the design problem within a unified framework, TOI enables the systematic identification of structural designs that satisfy both physical performance requirements and human preference–driven design intent.

Figure 7: Process of TOI includes unified information-represnetation, unified information-physics modeling and unified information-physics optimization. Density presentation [21], Latent presentation [118].
A central challenge in information–physics unified representation lies in the absence of a canonical form for representing design-relevant information. To enable information–physics co-optimization, TOI requires that both physical relations and information-related relations act on a shared set of design variables, so that variations in these variables simultaneously influence physical behavior and information-driven design attributes. Under this requirement, existing information–physics representations in TO can be broadly summarized into two representative categories. The first category establishes an explicit equivalence between material distribution variables and information descriptors [21,116,121]. Representative studies adopt this paradigm by treating material density fields and image grayscale values as equivalent design representations. For example, Zhang et al. [116] formulated material distribution and pixel intensity within a unified density-based framework, and employed the method of moving asymptotes (MMA) to jointly optimize structural performance and visual style, enabling style transfer in bridge design. Similarly, Liang et al. [21] introduced a UDF-weighting strategy within the BESO framework to couple sensitivity information from physical objectives and information-driven criteria, thereby achieving intelligent conceptual design through coordinated material removal and information guidance. The second category achieves unified representation by embedding material distributions into a shared latent space constructed for information processing [117,118]. In this paradigm, high-dimensional material layouts are compressed into a low-dimensional latent representation, and optimization is performed directly in the latent space. Variations in latent variables simultaneously influence both physical performance and perceptual or functional attributes encoded in the learned representation. For instance, Ijaz et al. [117] employed a SAGNet encoder to encode material distributions into a latent space, and demonstrated that optimization in this latent space can generate chair designs with both high structural performance and increased design diversity. In this sense, the latent space serves as a unified information–physics representation, bridging material distribution and design semantics within a single optimization domain.
For unified information–physics modeling, although the governing equations of specific physical problems and the models used to represent information may differ, the underlying mathematical formulation remains common. In TOI, optimal design is understood as being jointly determined by physical constraints and information, where information represents human preferences, functional intent, manufacturability, cost, and physics-related quantities that are difficult to model explicitly but can be learned or represented through AI. By formulating design as a unified information–physics co-optimization problem, TOI provides a systematic way to express human requirements and translate them into corresponding structural forms. This can be mathematically expressed as follows:
where

Figure 8: Four interpretations of TOI [114].
(1) Optimal design as an information–physics unified entity.
In TOI, optimal design is not determined solely by physical variables, but jointly by physical states and information. The equation
(2) High-dimensional design manifolds shaped by information
From an information-centric perspective, TOI can be viewed as constructing an information–physics coupled manifold defined on the physical design space, in which information and physical variables are jointly embedded and co-determined by governing relations. In this formulation, information
(3) Information-assisted compensation of physical modeling and discretization errors.
Governing equations are idealized abstractions that are commonly simplified through modeling assumptions, linearization, and numerical discretization, which inevitably introduce errors when applied to real-world systems. Within TOI, the information term
(4) Toward an operational convergence between information and physics in governing relations.
At the level of computational operations, information and physics can play increasingly comparable functional roles. Both may enter the formulation as operators or constraints that regulate admissible designs and influence optimization trajectories. In this sense, information is not merely an auxiliary input, but participates directly in the governing relations alongside physical laws. The formulation
By jointly modeling physics and information, structural design gains enhanced capability not only in achieving high physical performance but also in satisfying diverse and evolving design requirements.
Within TOI, the unified condition
For information–physics co-optimization algorithms in TOI, optimization is carried out on a unified information–physics representation. As a result, optimization mechanisms originating from physics-based TO and information-driven learning can act simultaneously on the same coupled representation. Physics-based optimizers enforce deterministic physical consistency, while information-based optimizers guide statistical or data-informed adaptation within the same optimization process. Through this joint action, TOI enables true information–physics co-optimization, in which physical performance and information-driven requirements are optimized in a coordinated and scalable manner across high-dimensional design spaces.
In summary, TOI formalizes information and physics within a unified governing framework, enabling collaborative computation through the extended formulation

Figure 9: Development of information-physics optimization function. Here, ID represents the information from dataset, and IR represents the information from runtime human-machine interaction. Ijaz et al. (2025) [117]; Zhan et al. (2025) [118]; Nobari et al. (2025) [73]; Liang et al. (2025) [21]; Jeong et al. (2023) [122]; Zhao et al. (2025) [123]; Huang et al. (2023) [89]; Vijayakumaran et al. (2025) [124]; Hao et al. (2025) [86]; Zhang et al. (2023) [116]; Zhang et al. (2024) [125].
4.3 Unified Interpretation across Design Tasks
In the following, we show that the introduction of TOI enables a more unified view of structural design problems that are traditionally treated in isolation. Under this perspective, seemingly distinct tasks, such as computational acceleration, design control, and fidelity enhancement, can be interpreted as different manifestations of information–physics co-modeling within a single optimization framework, thereby providing a coherent understanding of their underlying connections and design implications. The framework is shown in Fig. 10.

Figure 10: Unified interpretation of different tasks in the view of TOI.
Structural control objectives such as controlling the number of holes, enforcing minimum length scales, and improving aesthetic qualities can be formulated as a coupled modeling problem, in which human preference information, including images, sketches, and textual prompts, explicitly interacts with physics-based performance criteria to determine admissible and desirable designs. Within the TOI framework, constructing an information–physics coupled design space can be broadly realized through two complementary paradigms, depending on how physical constraints are enforced during optimization: a weakly constrained information–physics space and a strongly constrained information–physics space (Fig. 11). In weakly constrained information–physics spaces, physical consistency is enforced in a relaxed manner while prioritizing the satisfaction of human preference information. Such formulations allow the optimization process to explore smoother and more continuous coupled spaces, which facilitates convergence in practice. From a design perspective, physically near-optimal solutions can be efficiently obtained by slightly tightening performance requirements at an earlier stage. Representative studies adopt this paradigm by embedding preference information into optimization processes with softened physical enforcement. For example, Vulimiri et al. [126] replaced conventional TO optimizers such as OC and MMA with Adam, and employed Gram-matrix-based similarity measures to transfer texture information from reference images to cantilever beam designs. In this formulation, preference consistency is emphasized during exploration, while physical performance is subsequently refined. In contrast, strongly constrained information–physics spaces require strict satisfaction of physical constraints throughout the optimization process, while preference information is incorporated in a secondary but explicit manner. Owing to the tighter coupling between preference and physics, these formulations are generally more challenging to optimize and computationally more demanding. Gradient-based coupling strategies are commonly adopted to construct such spaces. Building on Gram-matrix-based style representations, Zhang et al. [116] explicitly coupled gradients derived from style loss and MMA-based physical optimization, thereby forming a unified information–physics optimization space. This approach enabled image-driven style transfer under strong physical constraints, producing bridge designs with diverse aesthetic characteristics. Related methodologies have also been extended to sketch-guided information–physics coupling [125], enabling interactive control during topology evolution. Similar ideas were further applied to shell structure design to achieve style-aware yet physically consistent configurations [127]. To reduce hyperparameters in the Gram-matrix-based method, Liang et al. proposed a UDF-weighting strategy to construct a semantic–physics coupled design space [21], allowing efficient conceptual design generation. In addition to explicit feature coupling, latent-space-based fusion provides an alternative mechanism for information–physics integration. For example, semantic and performance features can be jointly embedded into a latent space using CLIP [128], where pre-designed latent priors guide the generation of cantilever beam designs with multiple stylistic variations. From the perspective of input information types, design control is evolving from relatively simple and single-form inputs, such as images [129], sketches [125,130], design skeletons [131], and textual prompts [128,132], toward more complex forms of information input, for example those informed by biological inspiration [133,134].

Figure 11: Preference information, such as sketch [135], image [128], prompt [12] and VR [136] interaction, can improve the controllability of TO through information-physics co-optimization.
Acceleration can be understood in TOI as an information–physics co-modeling process in which historical information actively reshapes the effective design manifold explored by TO (Fig. 12). All intermediate design data produced during iterative TO can be regarded as historical information, because they encode accumulated knowledge about the structure–performance relationship along the optimization trajectory. Traditional TO acceleration methods typically extract empirical patterns from optimization histories, such as characteristic features of matrix computations or convergence behavior, to improve computational efficiency within a fixed physics-based formulation. In contrast, TOI conceptually incorporates it into a unified optimization formulation that co-defines both the admissible design space and the search dynamics. In this view, acceleration is not merely computational speed-up; it reflects how past states deform the geometry of the optimization landscape so that subsequent search is guided toward physically meaningful, computationally efficient regions. This interpretation is supported by an observable methodological evolution. Early “iteration-free” one-shot approaches represent an extreme form of acceleration, in which historical datasets are used to learn direct mappings from problem specifications to final topologies [84,137]. In these methods, explicit traversal of the design space is replaced by sampling from a learned distribution of high-quality designs. Owing to the limited size and diversity of available training datasets, such approaches typically rely on low-capacity or low-dimensional representation networks, which in turn leads to restricted expressiveness and poor generalization across problem settings [82,138]. As a result, while one-shot methods achieve remarkable speed-ups, their applicability is often confined to narrowly defined design scenarios. Subsequent research recognized that historical information can be more robustly exploited within iterative TO frameworks, allowing acceleration to be achieved without sacrificing optimization accuracy or physical consistency. Rather than bypassing iterations entirely, these methods incorporate algorithm-internal historical information—such as intermediate designs, sensitivities, and state variables—into the optimization loop. This shift redirected attention toward reducing iteration counts [139,140] and alleviating the most computationally expensive stages of the process, particularly repeated finite element analyses. A wide range of acceleration strategies emerged from this perspective, including physics informed neural network (PINN) [88,122], deep energy method (DEM) [123,141], Operator learning [89,142], all of which preserve the underlying physics-based optimality formulation. More recent studies have further abstracted acceleration by analyzing the influence of neural representations on the geometry of the optimization landscape itself. Sanu et al. introduce neural topology optimization framework [114], this work demonstrates that acceleration can arise from a fundamental reshaping of the decision space. In this view, neural parameterizations alter the effective design manifold explored by the optimizer, changing optimization trajectories and convergence behavior even when the governing physics and objective functions remain unchanged.

Figure 12: Historical information accumulated from prior design attempts [87], including intermediate physical quantities (e.g., sensitivities, displacement fields, and stiffness matrices) [142], design results [143], and optimization-stage information [144], can be reused to significantly accelerate the TO process.
From a TOI perspective, the incorporation of physical information into TO extends beyond improving numerical accuracy or computational efficiency (Fig. 13); it fundamentally reconstructs the notion of physics-based optimality by embedding physical fidelity directly into the optimization model itself. Rather than treating physical laws as fixed and exact governing constraints, TOI recognizes that practical physical models are inherently approximate and incomplete. Physical information—derived from experiments, multiscale simulations, or constitutive observations—therefore plays a critical role in calibrating, correcting, and enriching physics-based formulations, leading to a fidelity-aware definition of optimality that more faithfully reflects real material behavior and structural response. A representative application of this paradigm is multiscale TO based on architected cellular structures. Vijayakumaran et al. [124] replaced conventional RVE-based homogenization with a neural constitutive model that satisfies hyperplastic constraints, embedding TO within a finite-strain framework to enable accurate, differentiable, and efficient multiscale structural design. By encoding physically admissible material behavior directly into the constitutive representation, this approach allows physical information at the microscale to be propagated consistently through the optimization process, thereby redefining optimality in terms of both structural performance and constitutive fidelity. Similarly, the DL-MSTO+ framework [145] incorporated a positive-definiteness–guaranteed deep material representation network into multiscale TO, achieving a tight coupling between microstructural parameterization and macroscopic structural optimization while simultaneously improving computational efficiency. Ihuaenyi et al. [146] proposed a mechanics informatics paradigm that quantifies the information content of mechanical test data using stress state entropy, and embeds this metric into a Bayesian optimization framework to enable information-driven specimen design for accurate constitutive model learning. Building upon the mechanics informatics paradigm, subsequent studies extended the information-driven framework from parameterized specimen shapes to TO [115], enabling a much richer design space for informative test specimen design. In summary, these methods exemplify how physics-informed neural representations can act as fidelity-preserving intermediaries between different physical scales, rather than as black-box accelerators.

Figure 13: Physics information, such as material response [124] and manufacturing process [147], can improve fidelity and reliability of structural designs.
5 Opportunities in Topology Optimization Informatics
5.1 General Representations and Optimization Frameworks for Information–Physics Unified Design
Recent advances in large-scale AI have shown that unifying representation, modeling, and optimization within a single computational framework can fundamentally change how complex systems are learned and generated. From a TOI perspective, the central issue is therefore no longer how to couple TO with specific neural architectures, but how to establish more general and expressive forms of information–physics unification.
A critical aspect of this unification concerns the form of representation. Existing density-based descriptions, grayscale fields, and their learned latent embeddings have enabled compact encoding and one-shot generation of design families, yet they remain limited in their ability to explicitly encode physical meaning, manufacturability, and multi-scale structural semantics. This highlights the need for representations in which geometric, physical, and informational attributes are jointly parameterized, rather than hierarchically decoupled.
Closely related challenges arise at the levels of modeling and optimization. When information is treated as an intrinsic component of the governing equations instead of an external modifier, fundamental questions emerge regarding how preference information, historical optimization trajectories, experimental observations, and multi-fidelity knowledge can be consistently incorporated into physics-based formulations. In this context, learning-based generation, surrogate-assisted acceleration, and classical physics-driven optimization may be better viewed not as competing approaches, but as different manifestations of a more general information–physics optimization principle.
At present, structural design remains constrained by existing design methodologies and manufacturing techniques, as it still relies on geometric parameterization within CAD models. Traditional design approaches have consequently reached a developmental bottleneck. Nowadays, we are confronted with the need to develop a representation of semantic design—that is, to define the inherent meaning of structures. This semantic essence encompasses both the objective physical characterization of a structure and its contextual significance within human society. AI has demonstrated the ability to transcend linguistic barriers by enabling translation across diverse natural languages; in this regard, design language can likewise be viewed as a means of describing objective entities. The semantics of structure thus require systematic construction and clarification [148–150] (Fig. 14).

Figure 14: Load identification provides the missing semantic-to-physics bridge. Design semantics define a prior over boundary conditions, while inverse identification assimilates sensing/response data to obtain a posterior, enabling closed-loop semantic structural design under uncertainty [148,149].
Building semantic structural representations requires not only large-scale datasets but also the establishment of a unified ontology that encodes structural functions, physical behaviors, fabrication constraints, material characteristics, and usage contexts in a machine-interpretable manner. Such an ontology functions as the semantic backbone of intelligent design systems, bridging low-level geometric and material attributes with high-level engineering intents and social meanings. Recent advances in multimodal foundation models suggest that structural semantics can be learned through cross-domain alignment—linking geometry, performance metrics, textual descriptions, manufacturing rules, and even environmental or ergonomic considerations into a shared latent space. Within this unified representation, structures are no longer treated merely as geometric configurations but as carriers of functional purposes, physical laws, and human-centered values. This shift lays the groundwork for AI systems capable of understanding why a structure exists, not just how it is shaped, thereby enabling more interpretable, adaptive, and context-aware design generation [151]. Such a semantically enriched framework can be naturally extended to diverse physical domains, including fluid dynamics, fatigue [152] and durability analysis, thermal transport, and multiphysics coupling problems, where functional intent and physical behavior must be coherently integrated.
5.3 Information-Based Acceleration Algorithms
With the rapid development of AI, the paradigm of computational acceleration is shifting from traditional numerical optimization toward an “information–physics integrated” framework. Recent studies increasingly attempt to combine the representational capacity of deep learning with the differentiable solving mechanisms of physical equations, enabling computational procedures to retain the interpretability of classical numerical methods while benefiting from the efficiency of data-driven models. In tasks such as finite element analysis, TO, and multiscale modeling, learning-based surrogate models have been progressively embedded into the physical solving pipeline to accelerate matrix assembly, predict iterative updates, approximate constitutive relations, or provide reduced-order representations of solution spaces. These approaches no longer rely on neural networks as black-box predictors; instead, they integrate them into critical steps of traditional solvers, enforcing structured and differentiable constraints to ensure numerical stability and thereby achieving genuine reductions in computational cost for complex physics-based problems.
More importantly, information-driven acceleration is reshaping the workflow of computational design. As learning-augmented solvers become capable of producing approximate solutions within milliseconds, human–computer collaborative design is significantly enhanced, allowing designers to explore much broader design spaces with real-time feedback. This interactive and instant-response design paradigm not only increases the diversity and creativity of structural innovation but also accelerates the translation of conceptual layouts into engineering-ready solutions.
As intelligent systems continue to mature, the role of human designers is progressively shifting from direct geometric manipulation toward higher-level semantic steering and strategic decision-making. In this emerging paradigm, designers formulate intentions, constraints, and value judgments, while AI systems execute large-scale exploration, optimization, and real-time evaluation across vast design spaces that far exceed human cognitive limits. This division of labor transforms design from a deterministic procedure into a co-evolutionary process, in which human intuition and domain knowledge guide the search direction, and machine intelligence provides rapid, data-informed feedback that refines and reshapes the evolving solution. Such synergy encourages the discovery of unconventional yet feasible structures, enabling breakthroughs that may not arise through traditional human-only or machine-only workflows.
Furthermore, human-aided design [153] frameworks increasingly rely on multimodal interaction mechanisms, such as natural language instructions, sketch-based prompts, gesture interfaces, and semantic constraints, to bridge the cognitive gap between human intent and machine interpretation (Fig. 15). These interaction paradigms redefine how design knowledge is expressed, making structural concepts more accessible and enabling non-expert stakeholders to participate meaningfully in the design process. From an engineering standpoint, the integration of explainable AI techniques and interactive simulation further enhances trust, transparency, and accountability, ensuring that designers can interrogate machine-generated outcomes, understand physical rationale, and validate design decisions within a continuous feedback loop.

Figure 15: Structural design evolves from human-centered requirement analysis and structural realization toward computer-centered requirement analysis and structural practice.
5.5 Reliable Optimization through Theory–Data Synergy
The acquisition of high-quality design data is often expensive and limited in practice. Rather than representing a weakness of the TOI framework, this constraint highlights a crucial direction for its development. TOI does not aim to replace physics-based modeling with data-driven components; instead, it seeks to establish a structured synergy between theoretical models and real-world data under unified optimization principles. Within this framework, information is not treated as an independent or arbitrary input, but as a controlled interface through which empirical knowledge, historical records, or preference data are systematically embedded into the governing relations while preserving physical consistency.
When available data are sparse, noisy, or low-fidelity, the physics-based model provides a structural anchor that stabilizes the optimization process and prevents over-reliance on incomplete information. Strategies such as multi-fidelity integration, physics-guided data correction, and uncertainty-aware modeling enable informational enhancement while maintaining computational reliability and convergence properties. In this sense, information serves to refine and augment, rather than override, the underlying physical structure.
Therefore, the synergy between theory and real data in TOI is not a simple aggregation of modeling paradigms, but a coherent and interpretable optimization framework that balances physical rigor with empirical adaptability. This direction not only addresses practical data limitations but also offers a concrete pathway toward the integration of physics-based and data-driven paradigms in structural design.
TOI shifts structural design from a purely physics-centric process to a paradigm that equally emphasizes needs and physical realization. Structural design is essentially the externalization of internal requirements into manufacturable artifacts. Traditionally, this translation has relied on prevailing manufacturing conditions and individual experiential knowledge. With increasing computational power and richer material systems, demand-side specification and satisfaction have become more attainable. Within a unified optimization framework, explicitly integrating historical information, preference information, and real-world information enables joint modeling of objectives, constraints, manufacturability, and user intent. Consequently, the process evolves from merely solving a prescribed physical problem to a verifiable, multi-objective decision-making procedure that achieves complex requirements more economically.
Looking forward, the evolution of structural design patterns and TO is expected to move toward greater autonomy, integration, and semantic understanding. Future design systems will increasingly depart from the traditional workflow that treats modeling, analysis, and optimization as isolated procedures, and instead adopt holistic frameworks in which geometry, physics, manufacturing constraints, sustainability considerations, and user intent are jointly represented and reasoned about. Advances in differentiable simulation, multimodal generative modeling, and operator learning will allow TO to operate across scales and materials with unprecedented fidelity, enabling structures that adapt to evolving environments and multifunctional requirements. At the same time, interactive human–AI design interfaces will transform the role of engineers from manual decision-makers to strategic supervisors who shape design intent while delegating large-scale exploration and evaluation to intelligent computational agents. The integration of semantic representations, real-world data, and adaptive learning mechanisms will further support the creation of design systems capable of continuous self-improvement and contextual reasoning. Collectively, these developments point toward a future in which TO becomes not merely a computational tool but a foundational paradigm for general structural design—one that unifies creativity, performance, and manufacturability within a coherent, intelligent framework (Fig. 16).

Figure 16: General structural design represents the evolution of structural design toward an intelligent framework that unifies creativity, performance, and manufacturability.
Apart from the advantages of the approaches, some major drawbacks and challenges associated with the current state of TOI are addressed as follow:
(1) The acquisition of high-quality design data is often expensive and limited, which hinders the training of robust models.
(2) Current structural design still relies heavily on geometric parameterization within CAD models, which the sources describe as having reached a developmental bottleneck.
(3) Establishing general and expressive forms of information–physics unification remains a central issue, as geometric, physical, and informational attributes are often still hierarchically decoupled rather than jointly parameterized.
(4) Conventional physical models are often idealized abstractions that introduce errors through linearization and numerical discretization, requiring complex auxiliary mechanisms to compensate for these discrepancies.
(5) Semantic design infrastructure remains immature. A canonical semantic representation of design intent is still missing, making design-relevant information hard to formalize and reuse beyond CAD geometry.
Acknowledgement: This research was supported by Meituan Academy of Robotics Shenzhen.
Funding Statement: This research was funded by the Guangdong Basic and Applied Basic Research Foundation (2024A1515011786 and 2025A1515010672).
Author Contributions: Study conception and design: Zelong Liang, Yingjun Wang; data collection: Zelong Liang; analysis and interpretation of results: Zelong Liang; draft manuscript preparation: Zelong Liang, Yingjun Wang, Tinh Quoc Bui, Zhichao Dong, Weihua Li. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: Not applicable.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
Abbreviations
| TO | Topology Optimization |
| AI | Artificial Intelligence |
| TOI | Topology Optimization Informatics |
| SIMP | Solid Isotropic Material with Penalization |
| BESO | Bi-directional Evolutionary Structural Optimization |
| MMC | Moving Morphable Components |
| FEM | Finite Element Method |
| CAD | Computer-Aided Design |
| CAE | Computer-Aided Engineering |
| HAD | Human-Aided Design |
| MMA | Method of Moving Asymptotes |
| PINN | Physics-Informed Neural Network |
| DEM | Deep Energy Method |
References
1. Hey T, Tansley S, Tolle KM. The fourth paradigm: data-intensive scientific discovery. Vol. 1. Redmond, WA, USA: Microsoft Research; 2009. [Google Scholar]
2. Wang Y, Li X, Long K, Wei P. Open-source codes of topology optimization: a summary for beginners to start their research. Comput Model Eng Sci. 2023;137(1):1–34. doi:10.32604/cmes.2023.027603. [Google Scholar] [CrossRef]
3. van den Brink W, Koenis T, Osinga T, Montero-Sistiaga M. Topology optimization for aircraft applications using hybrid and multi-material methods for different component scales. Eng Proc. 2025;90(1):67. doi:10.3390/engproc2025090067. [Google Scholar] [CrossRef]
4. Gao Y, Zhang L, Liu Z, Ge Y, Ma L. Optimization design of star tracker bracket of small satellite for 3D printing. In: Proceedings of the 2019 5th International Conference on Control, Automation and Robotics (ICCAR); 2019 Apr 19–22; Beijing, China. New York, NY, USA: IEEE; 2019. p. 808–11. doi:10.1109/iccar.2019.8813432. [Google Scholar] [CrossRef]
5. Gomes P, Palacios R. Aerostructural topology optimization using high fidelity modeling. Struct Multidiscip Optim. 2022;65(5):137. doi:10.1007/s00158-022-03234-9. [Google Scholar] [CrossRef]
6. Matsimbi M, Nziu PK, Masu LM, Maringa M. Topology optimization of automotive body structures: a review. Int J Eng Res Technol. 2021;13:4282–96. [Google Scholar]
7. Wang H, Wang Z, Fan Y, Gao Q, Wang H. Multi-objective lightweight design of automotive battery pack box for crashworthiness. Int J Crashworthiness. 2024;29(2):292–307. doi:10.1080/13588265.2023.2230646. [Google Scholar] [CrossRef]
8. Hassan AA, Biswas B. Topology optimization of an automotive seatbelt bracket considering fatigue. Designs. 2024;8(5):99. doi:10.3390/designs8050099. [Google Scholar] [CrossRef]
9. Li J, Ye H, Dong Y, Liu Z, Sun T, Wu H. An efficient deep learning-based topology optimization method for continuous fiber composite structure. Acta Mech Sin. 2024;41(4):424207. doi:10.1007/s10409-024-24207-x. [Google Scholar] [CrossRef]
10. Xu S, Liu J, Ma Y. Residual stress constrained self-support topology optimization for metal additive manufacturing. Comput Meth Appl Mech Eng. 2022;389(6):114380. doi:10.1016/j.cma.2021.114380. [Google Scholar] [CrossRef]
11. Vulimiri PS, Garner S, To AC. Process-aware topology optimization leveraging deep learning surrogate model-based functions for laser powder bed fusion. Addit Manuf. 2026;118(2):105094. doi:10.1016/j.addma.2026.105094. [Google Scholar] [CrossRef]
12. Barber G, Henry TC, Haile MA. Generating physically sound designs from text and a set of physical constraints. arXiv:2602.02213. 2026. [Google Scholar]
13. Manguri A, Hassan H, Saeed N, Jankowski R. Topology, size, and shape optimization in civil engineering structures: a review. Comput Model Eng Sci. 2025;142(2):933–71. doi:10.32604/cmes.2025.059249. [Google Scholar] [CrossRef]
14. Manguri A, Saeed N, Szczepanski M, Jankowski R. Bending moment control and weight optimization in space structures by adding extra members in the optimal locations. Adv Sci Technol Res J. 2023;17(4):313–24. doi:10.12913/22998624/169573. [Google Scholar] [CrossRef]
15. Wang Y, Sigmund O. Topology optimization of multi-material active structures to reduce energy consumption and carbon footprint. Struct Multidiscip Optim. 2024;67(1):5. doi:10.1007/s00158-023-03698-3. [Google Scholar] [CrossRef]
16. Liu H, Li B, Tang W. Manufacturing oriented topology optimization of 3D structures for carbon emission reduction in casting process. J Clean Prod. 2019;225(3):755–70. doi:10.1016/j.jclepro.2019.03.163. [Google Scholar] [CrossRef]
17. Zhang L, Zheng Y, Feng J. From material selection to structural topology optimization: sustainable product design based on carbon footprint allocation. J Mech Des. 2024;146(12):122001. doi:10.1115/1.4065788. [Google Scholar] [CrossRef]
18. Senatore G, Wang Y. Topology optimization of adaptive structures: new limits of material economy. Comput Meth Appl Mech Eng. 2024;422(1):116710. doi:10.1016/j.cma.2023.116710. [Google Scholar] [CrossRef]
19. Yoo S, Kang N. DeepWheel: generating a 3D synthetic wheel dataset for design and performance evaluation. J Mech Des. 2026;148(5):051702. doi:10.1115/1.4068376. [Google Scholar] [CrossRef]
20. Yan X, Bao D, Zhou Y, Xie Y, Cui T. Detail control strategies for topology optimization in architectural design and development. Front Archit Res. 2022;11(2):340–56. doi:10.1016/j.foar.2021.11.001. [Google Scholar] [CrossRef]
21. Liang Z, Zhang YF, Wang Y, Li W. Integrating large models with topology optimization for conceptual design realization. Adv Eng Inform. 2025;67(9):103524. doi:10.1016/j.aei.2025.103524. [Google Scholar] [CrossRef]
22. Yan R, Luo D, Huang H, Li R, Yu N, Liu C, et al. Electron beam melting in the fabrication of three-dimensional mesh titanium mandibular prosthesis scaffold. Sci Rep. 2018;8(1):750. doi:10.1038/s41598-017-15564-6. [Google Scholar] [PubMed] [CrossRef]
23. LEAP 71: why engineering must move beyond cad to realise the promise of AI and additive manufacturing [Internet]. 2025[cited 2026 Jan 19]. Available from: https://www.metal-am.com/articles/leap-71-why-engineering-must-move-beyond-cad-to-realise-the-promise-of-ai-and-additive-manufacturing/. [Google Scholar]
24. Chang KH. Design theory and methods using CAD/CAE: the computer aided engineering design series. London, UK: Academic Press; 2014. [Google Scholar]
25. Gao J, Xiao M, Zhang Y, Gao L. A comprehensive review of isogeometric topology optimization: methods, applications and prospects. Chin J Mech Eng. 2020;33(1):87. doi:10.1186/s10033-020-00503-w. [Google Scholar] [CrossRef]
26. Wang Y, Liao Z, Ye M, Zhang Y, Li W, Xia Z. An efficient isogeometric topology optimization using multilevel mesh, MGCG and local-update strategy. Adv Eng Softw. 2020;139(8):102733. doi:10.1016/j.advengsoft.2019.102733. [Google Scholar] [CrossRef]
27. Wang Y, Gao L, Qu J, Xia Z, Deng X. Isogeometric analysis based on geometric reconstruction models. Front Mech Eng. 2021;16(4):782–97. doi:10.1007/s11465-021-0648-0. [Google Scholar] [CrossRef]
28. Dedè L, Borden MJ, Hughes TJR. Isogeometric analysis for topology optimization with a phase field model. Arch Comput Meth Eng. 2012;19(3):427–65. doi:10.1007/s11831-012-9075-z. [Google Scholar] [CrossRef]
29. Ao Y, Li S, Duan H. Artificial intelligence-aided design (AIAD) for structures and engineering: a state-of-the-art review and future perspectives. Arch Comput Meth Eng. 2025;32(7):4197–224. doi:10.1007/s11831-025-10264-1. [Google Scholar] [CrossRef]
30. Zheng H, Moosavi V, Akbarzadeh M. Machine learning assisted evaluations in structural design and construction. Autom Constr. 2020;119(3):103346. doi:10.1016/j.autcon.2020.103346. [Google Scholar] [CrossRef]
31. Bagazinski NJ, Ahmed F. ShipGen: a diffusion model for parametric ship hull generation with multiple objectives and constraints. J Mar Sci Eng. 2023;11(12):2215. doi:10.3390/jmse11122215. [Google Scholar] [CrossRef]
32. Ao Y, Duan H, Li S. An integrated-hull design assisted by artificial intelligence-aided design method. Comput Struct. 2024;297(6):107320. doi:10.1016/j.compstruc.2024.107320. [Google Scholar] [CrossRef]
33. Michell AGM. LVIII. The limits of economy of material in frame-structures. Lond Edinb Dublin Philos Mag J Sci. 1904;8(47):589–97. doi:10.1080/14786440409463229. [Google Scholar] [CrossRef]
34. Cheng KT, Olhoff N. An investigation concerning optimal design of solid elastic plates. Int J Solids Struct. 1981;17(3):305–23. doi:10.1016/0020-7683(81)90065-2. [Google Scholar] [CrossRef]
35. Bendsøe MP, Kikuchi N. Generating optimal topologies in structural design using a homogenization method. Comput Meth Appl Mech Eng. 1988;71(2):197–224. doi:10.1016/0045-7825(88)90086-2. [Google Scholar] [CrossRef]
36. Sigmund O. A 99 line topology optimization code written in Matlab. Struct Multidiscip Optim. 2001;21(2):120–7. doi:10.1007/s001580050176. [Google Scholar] [CrossRef]
37. Xie YM, Steven GP. A simple evolutionary procedure for structural optimization. Comput Struct. 1993;49(5):885–96. doi:10.1016/0045-7949(93)90035-C. [Google Scholar] [CrossRef]
38. Querin OM, Steven GP, Xie YM. Evolutionary structural optimisation (ESO) using a bidirectional algorithm. Eng Comput. 1998;15(8):1031–48. doi:10.1108/02644409810244129. [Google Scholar] [CrossRef]
39. van Dijk NP, Maute K, Langelaar M, van Keulen F. Level-set methods for structural topology optimization: a review. Struct Multidiscip Optim. 2013;48(3):437–72. doi:10.1007/s00158-013-0912-y. [Google Scholar] [CrossRef]
40. Wang MY, Wang X, Guo D. A level set method for structural topology optimization. Comput Meth Appl Mech Eng. 2003;192(1–2):227–46. doi:10.1016/S0045-7825(02)00559-5. [Google Scholar] [CrossRef]
41. Wei P, Wang W, Yang Y, Wang MY. Level set band method: a combination of density-based and level set methods for the topology optimization of continuums. Front Mech Eng. 2020;15(3):390–405. doi:10.1007/s11465-020-0588-0. [Google Scholar] [CrossRef]
42. Guo X. Doing topology optimization explicitly and geometrically: a new moving morphable components based framework. In: Frontiers in applied mechanics. London, UK: Imperial College Press; 2015. p. 31–2. doi:10.1142/9781783266852_0016. [Google Scholar] [CrossRef]
43. Li Z, Xu H, Zhang S. A comprehensive review of explicit topology optimization based on moving morphable components (MMC) method. Arch Comput Meth Eng. 2024;31(5):2507–36. doi:10.1007/s11831-023-10053-8. [Google Scholar] [CrossRef]
44. Amir O, Aage N, Lazarov BS. On multigrid-CG for efficient topology optimization. Struct Multidiscip Optim. 2014;49(5):815–29. doi:10.1007/s00158-013-1015-5. [Google Scholar] [CrossRef]
45. Andreassen E, Clausen A, Schevenels M, Lazarov BS, Sigmund O. Efficient topology optimization in MATLAB using 88 lines of code. Struct Multidiscip Optim. 2011;43(1):1–16. doi:10.1007/s00158-010-0594-7. [Google Scholar] [CrossRef]
46. Wang H, Liu J, Wen G. An efficient evolutionary structural optimization method for multi-resolution designs. Struct Multidiscip Optim. 2020;62(2):787–803. doi:10.1007/s00158-020-02536-0. [Google Scholar] [CrossRef]
47. Träff EA, Rydahl A, Karlsson S, Sigmund O, Aage N. Simple and efficient GPU accelerated topology optimisation: codes and applications. Comput Meth Appl Mech Eng. 2023;410(6):116043. doi:10.1016/j.cma.2023.116043. [Google Scholar] [CrossRef]
48. Sanfui S, Sharma D. Soft- and hard-kill hybrid graphics processing unit-based bidirectional evolutionary structural optimization. J Comput Inf Sci Eng. 2024;24(4):041007. doi:10.1115/1.4064070. [Google Scholar] [CrossRef]
49. Liang Y, Yan X, Cheng G. Explicit control of 2D and 3D structural complexity by discrete variable topology optimization method. Comput Meth Appl Mech Eng. 2022;389(1):114302. doi:10.1016/j.cma.2021.114302. [Google Scholar] [CrossRef]
50. Zhou L, Gao T, Zhang W. Hole control methods in feature-driven topology optimization. Comput Meth Appl Mech Eng. 2023;417:116447. doi:10.1016/j.cma.2023.116447. [Google Scholar] [CrossRef]
51. Wang Q, Han H, Wang C, Liu Z. Topological control for 2D minimum compliance topology optimization using SIMP method. Struct Multidiscip Optim. 2022;65(1):38. doi:10.1007/s00158-021-03124-6. [Google Scholar] [CrossRef]
52. Zuo T, Han H, Liu Z. Explicit tunnels and cavities control using SIMP and MMA in structural topology optimization. Comput Aided Des. 2023;158:103482. doi:10.1016/j.cad.2023.103482. [Google Scholar] [CrossRef]
53. Hoang VN, Jang GW. Topology optimization using moving morphable bars for versatile thickness control. Comput Meth Appl Mech Eng. 2017;317:153–73. doi:10.1016/j.cma.2016.12.004. [Google Scholar] [CrossRef]
54. Zhao Y, Guo G, Zuo W. MATLAB implementations for 3D geometrically nonlinear topology optimization: 230-line code for SIMP method and 280-line code for MMB method. Struct Multidiscip Optim. 2023;66(7):146. doi:10.1007/s00158-023-03590-0. [Google Scholar] [CrossRef]
55. Guo Y, Du Z, Liu C, Zhang W, Xue R, Guo Y, et al. Explicit topology optimization of three-dimensional geometrically nonlinear structures. Acta Mech Sin. 2023;39(12):423084. doi:10.1007/s10409-023-23084-x. [Google Scholar] [CrossRef]
56. Kundu RD, Li W, Zhang XS. Multimaterial stress-constrained topology optimization with multiple distinct yield criteria. Extreme Mech Lett. 2022;54(1):101716. doi:10.1016/j.eml.2022.101716. [Google Scholar] [CrossRef]
57. Gao J, Wen Z, Zhai X, Chen F, Kang H. Concurrent topology optimization of multiscale composites with differentiable microstructures. Comput Meth Appl Mech Eng. 2024;431:117271. doi:10.1016/j.cma.2024.117271. [Google Scholar] [CrossRef]
58. Deaton JD, Grandhi RV. Stress-based design of thermal structures via topology optimization. Struct Multidiscip Optim. 2016;53(2):253–70. doi:10.1007/s00158-015-1331-z. [Google Scholar] [CrossRef]
59. Alexandersen J. A detailed introduction to density-based topology optimisation of fluid flow problems with implementation in MATLAB. Struct Multidiscip Optim. 2022;66(1):12. doi:10.1007/s00158-022-03420-9. [Google Scholar] [CrossRef]
60. Guo H, Xie X, Cheng F, Li Z, Zhang R, Bai J, et al. 299-line topology optimization code of nearly incompressible hyperelastic materials using three-field mixed finite element. Comput Mech. 2026:1–19. doi:10.1007/s00466-025-02741-y. [Google Scholar] [CrossRef]
61. Wang B, Yaylaci M, Bai J, Zuo W. A 499-line MATLAB implementation for frictional contact topology optimization. Struct Multidiscip Optim. 2025;68(9):169. doi:10.1007/s00158-025-04081-0. [Google Scholar] [CrossRef]
62. Panyatong M, Chinnaboon B, Chucheepsakul S. Bending analysis of functionally graded plates with arbitrary shapes and boundary conditions. Struct Eng Mech Int J. 2019;71(6):627–41. doi:10.1016/j.enganabound.2017.12.003. [Google Scholar] [CrossRef]
63. Lizarribar B, Prieto B, Selema A, Ibrahim MN, Sergeant P, Artetxe G, et al. Multiphysics topology optimization of aluminum and copper conductors for automotive electrical machines. IEEE Trans Transp Electrif. 2024;10(4):9342–50. doi:10.1109/TTE.2024.3367040. [Google Scholar] [CrossRef]
64. Gao J, Cao X, Xiao M, Yang Z, Zhou X, Li Y, et al. Rational designs of mechanical metamaterials: formulations, architectures, tessellations and prospects. Mater Sci Eng R Rep. 2023;156:100755. doi:10.1016/j.mser.2023.100755. [Google Scholar] [CrossRef]
65. Tanveer M, Azad MM, Kim D, Khalid S, Kim HS. Generative design for engineering applications: a state-of-the-art review. Arch Comput Meth Eng. 2026;33(1):53–79. doi:10.1007/s11831-025-10302-y. [Google Scholar] [CrossRef]
66. Zhu C, Bamidele EA, Shen X, Zhu G, Li B. Machine learning aided design and optimization of thermal metamaterials. Chem Rev. 2024;124(7):4258–331. doi:10.1021/acs.chemrev.3c00708. [Google Scholar] [PubMed] [CrossRef]
67. Shin S, Shin D, Kang N. Topology optimization via machine learning and deep learning: a review. J Comput Des Eng. 2023;10(4):1736–66. doi:10.1093/jcde/qwad072. [Google Scholar] [CrossRef]
68. Ma C, Wang Z, Zhang H, Yang F, Chen J, Ren Q, et al. Inverse design of electromagnetic metamaterials: from iterative to deep learning-based methods. J Micromech Microeng. 2024;34(5):053001. doi:10.1088/1361-6439/ad3a72. [Google Scholar] [CrossRef]
69. Mazé F, Ahmed F. Diffusion models beat GANs on topology optimization. Proc AAAI Conf Artif Intell. 2023;37(8):9108–16. doi:10.1609/aaai.v37i8.26093. [Google Scholar] [CrossRef]
70. Zhan SZ, Shi X, Feng XQ, Zhao ZL. A one-time training machine learning method for general structural topology optimization. Thin Walled Struct. 2024;205(2):112595. doi:10.1016/j.tws.2024.112595. [Google Scholar] [CrossRef]
71. Parrott CM, Abueidda DW, James KA. Multidisciplinary topology optimization using generative adversarial networks for physics-based design enhancement. J Mech Des. 2023;145(6):061704. doi:10.1115/1.4056929. [Google Scholar] [CrossRef]
72. Wang Z, Melkote S, Rosen DW. Generative design by embedding topology optimization into conditional generative adversarial network. J Mech Des. 2023;145(11):111702. doi:10.1115/1.4062980. [Google Scholar] [CrossRef]
73. Nobari AH, Regenwetter L, Picard C, Han L, Ahmed F. Optimize any topology: a foundation model for shape- and resolution-free structural topology optimization. arXiv:2510.23667. 2025. [Google Scholar]
74. Wang H, Du Z, Feng F, Kang Z, Tang S, Guo X. DiffMat: data-driven inverse design of energy-absorbing metamaterials using diffusion model. Comput Meth Appl Mech Eng. 2024;432:117440. doi:10.1016/j.cma.2024.117440. [Google Scholar] [CrossRef]
75. Ahmed F, Giannone G, Srivastava A, Winther O. Aligning optimization trajectories with diffusion models for constrained design generation. In: Proceedings of the Advances in Neural Information Processing Systems 36; 2023 Dec 10–16; New Orleans, Louisiana, USA. San Diego, CA, USA: Neural Information Processing Systems Foundation, Inc. (NeurIPS); 2023. p. 51830–61. doi:10.52202/075280-2258. [Google Scholar] [CrossRef]
76. Yan S, Jelovica J. KATO: neural-reparameterized topology optimization using convolutional Kolmogorov-Arnold network for stress minimization. Int J Numer Meth Eng. 2025;126(8):e70034. doi:10.1002/nme.70034. [Google Scholar] [CrossRef]
77. Ali M, Duchesne F, Dahman G, Gagnon F, Naboulsi D. New approaches for network topology optimization using deep reinforcement learning and graph neural network. IEEE Access. 2025;13:85447–60. doi:10.1109/ACCESS.2025.3569236. [Google Scholar] [CrossRef]
78. Rochefort-Beaudoin T, Vadean A, Aage N, Achiche S. Structural design through reinforcement learning. Eng Appl Artif Intell. 2025;161:112273. doi:10.1016/j.engappai.2025.112273. [Google Scholar] [CrossRef]
79. Brown NK, Garland AP, Fadel GM, Li G. Deep reinforcement learning for engineering design through topology optimization of elementally discretized design domains. Mater Des. 2022;218:110672. doi:10.1016/j.matdes.2022.110672. [Google Scholar] [CrossRef]
80. Zhu S, Lv J, Wu D, Yu H, Wang W, Zhang Z, et al. Graph convolutional networks-driven multiscale topology optimization base on polygonal coarse-grid elements. Int J Mech Sci. 2025;301:110500. doi:10.1016/j.ijmecsci.2025.110500. [Google Scholar] [CrossRef]
81. Yang Z, Guo Y, Sun Z, Elkhodary KI, Feng F, Tang S, et al. GraphDGM: a generative data-driven design approach for frame and lattice structures. J Mech Des. 2025;147(10):101701. doi:10.1115/1.4068106. [Google Scholar] [CrossRef]
82. Nobari AH, Giannone G, Regenwetter L, Ahmed F. NITO: neural implicit fields for resolution-free topology optimization. arXiv:2402.05073. 2024. [Google Scholar]
83. Hu J, He Y, Xu B, Wang S, Lei N, Luo Z. IF-TONIR: iteration-free topology optimization based on implicit neural representations. Comput Aided Des. 2024;167(6):103639. doi:10.1016/j.cad.2023.103639. [Google Scholar] [CrossRef]
84. Nie Z, Lin T, Jiang H, Kara LB. TopologyGAN: topology optimization using generative adversarial networks based on physical fields over the initial domain. J Mech Des. 2021;143(3):031715. doi:10.1115/1.4049533. [Google Scholar] [CrossRef]
85. Yoo S, Lee S, Kim S, Hwang KH, Park JH, Kang N. Integrating deep learning into CAD/CAE system: generative design and evaluation of 3D conceptual wheel. Struct Multidiscip Optim. 2021;64(4):2725–47. doi:10.1007/s00158-021-02953-9. [Google Scholar] [CrossRef]
86. Hao W, Du Z, Hou X, Guo Y, Liu C, Zhang W, et al. Intelligent design of mechanical metamaterials: a GCNN-based structural genome database approach. Natl Sci Rev. 2025;12(4):nwaf053. doi:10.1093/nsr/nwaf053. [Google Scholar] [PubMed] [CrossRef]
87. Qian W, Li H. Real-time generalizable structural topology generation via Fourier and latent modulated neural networks informed by few prior designs. Eng Struct. 2026;348:121700. doi:10.1016/j.engstruct.2025.121700. [Google Scholar] [CrossRef]
88. Zhou Y, Wang Z, Zhou K, Tang H, Li X. LT-PINN: lagrangian topology-conscious physics-informed neural network for boundary-focused engineering optimization. Comput Meth Appl Mech Eng. 2026;448(6):118453. doi:10.1016/j.cma.2025.118453. [Google Scholar] [CrossRef]
89. Huang M, Cui T, Liu C, Du Z, Zhang J, He C, et al. A Problem-Independent Machine Learning (PIML) enhanced substructure-based approach for large-scale structural analysis and topology optimization of linear elastic structures. Extreme Mech Lett. 2023;63:102041. doi:10.1016/j.eml.2023.102041. [Google Scholar] [CrossRef]
90. Xiang C, Chen A, Li H, Wang D, Ge B, Chang H. Two stage multiobjective topology optimization method via SwinUnet with enhanced generalization. Sci Rep. 2025;15(1):9350. doi:10.1038/s41598-025-92793-0. [Google Scholar] [PubMed] [CrossRef]
91. Giacomini M, Huerta A. A surrogate model for topology optimisation of elastic structures via parametric autoencoders. Comput Meth Appl Mech Eng. 2026;448:118503. doi:10.1016/j.cma.2025.118503. [Google Scholar] [CrossRef]
92. Chen H, Joglekar A, Burak Kara L. Topology optimization using neural networks with conditioning field initialization for improved efficiency. J Mech Des. 2024;146(6):061702. doi:10.1115/1.4064131. [Google Scholar] [CrossRef]
93. Takahashi Y, Suzuki Y, Todoroki A. Convolutional neural network-based topology optimization (CNN-TO) by estimating sensitivity of compliance from material distribution. arXiv:2001.00635. 2019. [Google Scholar]
94. He J, Chadha C, Kushwaha S, Koric S, Abueidda D, Jasiuk I. Deep energy method in topology optimization applications. Acta Mech. 2023;234(4):1365–79. doi:10.1007/s00707-022-03449-3. [Google Scholar] [CrossRef]
95. Ha D, Carstensen J. Automatic hyperparameter tuning of topology optimization algorithms using surrogate optimization. Struct Multidiscip Optim. 2024;67(9):157. doi:10.1007/s00158-024-03850-7. [Google Scholar] [CrossRef]
96. Herrmann L, Sigmund O, Li VM, Vogl C, Kollmannsberger S. On neural networks for generating better local optima in topology optimization. Struct Multidiscip Optim. 2024;67(11):192. doi:10.1007/s00158-024-03908-6. [Google Scholar] [CrossRef]
97. Sosnovik I, Oseledets I. Neural networks for topology optimization. Russ J Numer Anal Math Model. 2019;34(4):215–23. doi:10.1515/rnam-2019-0018. [Google Scholar] [CrossRef]
98. Kawabe H, Yaji K, Aoki Y. Data-driven multifidelity topology design with multi-channel variational auto-encoder for concurrent optimization of multiple design variable fields. Comput Meth Appl Mech Eng. 2025;437(8):117772. doi:10.1016/j.cma.2025.117772. [Google Scholar] [CrossRef]
99. Meng Z, Lv S, Gao Y, Zhong C, An K. Data-driven reliability-based topology optimization by using the extended multi scale finite element method and neural network approach. Comput Meth Appl Mech Eng. 2025;438(8):117837. doi:10.1016/j.cma.2025.117837. [Google Scholar] [CrossRef]
100. Liu C, Li S, Liu J, Bian X, Xiao Y. An advanced topology optimization technique for high-resolution designs at arbitrary scale. Eng Optim. 2025;57(10):3037–63. doi:10.1080/0305215X.2024.2424368. [Google Scholar] [CrossRef]
101. Lim J, Jung K, Jung Y, Kim DN. Accelerating topology optimization using deep learning-based image super-resolution. Eng Appl Artif Intell. 2024;133(2):108370. doi:10.1016/j.engappai.2024.108370. [Google Scholar] [CrossRef]
102. Jeong H, Batuwatta-Gamage C, Bai J, Rathnayaka C, Zhou Y, Gu Y. An advanced physics-informed neural network-based framework for nonlinear and complex topology optimization. Eng Struct. 2025;322:119194. doi:10.1016/j.engstruct.2024.119194. [Google Scholar] [CrossRef]
103. Yin J, Li S, Zhang Y, Wang H. An efficient discrete physics-informed neural networks for geometrically nonlinear topology optimization. Comput Meth Appl Mech Eng. 2025;442:118043. doi:10.1016/j.cma.2025.118043. [Google Scholar] [CrossRef]
104. Lee SH. A CAD-CAE integration approach using feature-based multi-resolution and multi-abstraction modelling techniques. Comput Aided Des. 2005;37(9):941–55. doi:10.1016/j.cad.2004.09.021. [Google Scholar] [CrossRef]
105. Kirkwood R, Sherwood JA. Sustained CAD/CAE integration: integrating with successive versions of step or IGES files. Eng Comput. 2018;34(1):1–13. doi:10.1007/s00366-017-0516-z. [Google Scholar] [CrossRef]
106. Tao J, Li L, Yu S. An innovative eco-design approach based on integration of LCA, CAD∖CAE and optimization tools, and its implementation perspectives. J Clean Prod. 2018;187(1):839–51. doi:10.1016/j.jclepro.2018.03.213. [Google Scholar] [CrossRef]
107. Xia S, Wang N, Chen B, Zhang X, Chen W. Nonlinear stiffness mechanism designed by topology optimization reduces backpack vibration. Int J Mech Sci. 2023;252(5):108345. doi:10.1016/j.ijmecsci.2023.108345. [Google Scholar] [CrossRef]
108. Liu Z, Gao F, Wang Y. A generative adversarial network for AI-aided chair design. In: Proceedings of the 2019 IEEE Conference on Multimedia Information Processing and Retrieval (MIPR); 2019 Mar 28–30; San Jose, CA, USA. New York, NY, USA: IEEE; 2019. p. 486–90. doi:10.1109/mipr.2019.00098. [Google Scholar] [CrossRef]
109. Buonamici F, Carfagni M, Furferi R, Volpe Y, Governi L. Generative design: an explorative study. Comput Aided Des Appl. 2020;18(1):144–55. doi:10.14733/cadaps.2021.144-155. [Google Scholar] [CrossRef]
110. An BH, Lee JW. Deep-learning-based generative design for optimal silencer using backpropagation of artificial neural network model. Adv Eng Inform. 2024;62(2):102763. doi:10.1016/j.aei.2024.102763. [Google Scholar] [CrossRef]
111. Srivastava J, Kawakami H. Systematic review of difference between topology optimization and generative design. IFAC Pap. 2023;56(2):6561–8. doi:10.1016/j.ifacol.2023.10.307. [Google Scholar] [CrossRef]
112. Liu Y, Yang M, Jiang P. CGAN-driven intelligent generative design of vehicle exterior shape. Expert Syst Appl. 2025;274(3):127066. doi:10.1016/j.eswa.2025.127066. [Google Scholar] [CrossRef]
113. Saadi JI, Yang MC. Generative design: reframing the role of the designer in early-stage design process. J Mech Des. 2023;145(4):041411. doi:10.1115/1.4056799. [Google Scholar] [CrossRef]
114. Sanu SM, Aragón AM, Bessa MA. Neural topology optimization: the good, the bad, and the ugly. Struct Multidiscip Optim. 2025;68(10):213. doi:10.1007/s00158-025-04135-3. [Google Scholar] [CrossRef]
115. Ihuaenyi RC, Zhu J. Mechanics informatics-driven topology optimization for test specimen design and single-test material characterization: a Gaussian random field approach. Int J Solids Struct. 2026;331:113894. doi:10.1016/j.ijsolstr.2026.113894. [Google Scholar] [CrossRef]
116. Zhang W, Wang Y, Du Z, Liu C, Youn SK, Guo X. Machine-learning assisted topology optimization for architectural design with artistic flavor. Comput Meth Appl Mech Eng. 2023;413:116041. doi:10.1016/j.cma.2023.116041. [Google Scholar] [CrossRef]
117. Ijaz H, Wang X, Chen W, Lin H, Li M. Physically reliable 3D styled shape generation via structure-aware topology optimization in unified latent space. Comput Aided Des. 2025;183(6):103864. doi:10.1016/j.cad.2025.103864. [Google Scholar] [CrossRef]
118. Zhan X, Jambon C, Thompson E, Ng K, Konaković Luković M. PhysiOpt: physics-driven shape optimization for 3D generative models. In: Proceedings of the SIGGRAPH Asia 2025 Conference Papers; 2025 Dec 15–18; Hong Kong, China. New York, NY, USA: The Association for Computing Machinery (ACM); 2025. p. 1–11. doi:10.1145/3757377.3763884. [Google Scholar] [CrossRef]
119. You Y, Zhao C, Zhang H, Xu M, Fua P. PhysGen: physically grounded 3D shape generation for industrial design. arXiv:2512.00422. 2025. [Google Scholar]
120. Liu Y, Xia B, Li Z, Ren H, Du J, Tan W. Co-design of structures via generalized evolution. Comput Meth Appl Mech Eng. 2026;450:118584. doi:10.1016/j.cma.2025.118584. [Google Scholar] [CrossRef]
121. Zhang Z, Yao W, Li Y, Zhou W, Chen X. Topology optimization via implicit neural representations. Comput Meth Appl Mech Eng. 2023;411(2):116052. doi:10.1016/j.cma.2023.116052. [Google Scholar] [CrossRef]
122. Jeong H, Bai J, Batuwatta-Gamage CP, Rathnayaka C, Zhou Y, Gu Y. A physics-informed neural network-based topology optimization (PINNTO) framework for structural optimization. Eng Struct. 2023;278:115484. doi:10.1016/j.engstruct.2022.115484. [Google Scholar] [CrossRef]
123. Zhao X, Mezzadri F, Wang T, Qian X. Physics-informed neural network based topology optimization through continuous adjoint. Struct Multidiscip Optim. 2024;67(8):143. doi:10.1007/s00158-024-03856-1. [Google Scholar] [CrossRef]
124. Vijayakumaran H, Russ JB, Paulino GH, Bessa MA. Consistent machine learning for topology optimization with microstructure-dependent neural network material models. J Mech Phys Solids. 2025;196(1):106015. doi:10.1016/j.jmps.2024.106015. [Google Scholar] [CrossRef]
125. Zhang W, Wang Y, Youn SK, Guo X. Machine learning powered sketch aided design via topology optimization. Comput Meth Appl Mech Eng. 2024;419:116651. doi:10.1016/j.cma.2023.116651. [Google Scholar] [CrossRef]
126. Vulimiri PS, Deng H, Dugast F, Zhang X, To AC. Integrating geometric data into topology optimization via neural style transfer. Materials. 2021;14(16):4551. doi:10.3390/ma14164551. [Google Scholar] [PubMed] [CrossRef]
127. Li Y, Zhang Z, Luo J, Peng W, Zhou W, Yao W. Concurrent topology optimization of shells with pattern-guided infills for intuitive design and additive manufacturing. Comput Meth Appl Mech Eng. 2024;418(7):116485. doi:10.1016/j.cma.2023.116485. [Google Scholar] [CrossRef]
128. Zhong S, Punpongsanon P, Iwai D, Sato K. Topology optimization with text-guided stylization. Struct Multidiscip Optim. 2023;66(12):256. doi:10.1007/s00158-023-03686-7. [Google Scholar] [CrossRef]
129. Xiang C, Chen A, Wang D, Ning Y. Deep-learning-based aesthetic evaluation network for bridge pylon and aesthetics-oriented bridge design. Structures. 2025;71(2):108167. doi:10.1016/j.istruc.2024.108167. [Google Scholar] [CrossRef]
130. Zhu S, Hu J, Qi J, Wang L, Guo J, Ma J, et al. Sketch-guided topology optimization with enhanced diversity for innovative structural design. Appl Sci. 2025;15(5):2753. doi:10.3390/app15052753. [Google Scholar] [CrossRef]
131. Zhang W, Zhuang X, Guo X, Youn SK. Human-augmented topology optimization design with multi-framework intervention. Eng Comput. 2025;41(4):2359–76. doi:10.1007/s00366-024-02102-y. [Google Scholar] [CrossRef]
132. Xie H, Ju F. Text-to-CadQuery: a new paradigm for CAD generation with scalable large model capabilities. arXiv:2505.06507. 2025. [Google Scholar]
133. He G, Zhou Y, Han Z, Xu Z, Lv H. Dragonfly-like wing structure enabled by a novel skeleton-reinforced neural style transfer assisted topology optimization and additive manufacturing. Eur J Mech A/solids. 2025;112:105631. doi:10.1016/j.euromechsol.2025.105631. [Google Scholar] [CrossRef]
134. Kong S, Ding X, Zhang H, Xiong M, Takezawa A. Image-physicsdriven topology optimization method with integrating biological features. Struct Multidiscip Optim. 2025;68(8):150. doi:10.1007/s00158-025-04075-y. [Google Scholar] [CrossRef]
135. Schiffer G, Schmidt MP, Pedersen CBW, Carstensen JV. Interactive infill topology optimisation guided by user drawn patterns. Virtual Phys Prototyp. 2024;19(1):e2361864. doi:10.1080/17452759.2024.2361864. [Google Scholar] [CrossRef]
136. Li Z, Lee TU, Xie YM. Interactive 3D structural design in virtual reality using preference-based topology optimization. Comput Aided Des. 2025;180(9):103826. doi:10.1016/j.cad.2024.103826. [Google Scholar] [CrossRef]
137. Lin Q, Hong J, Liu Z, Li B, Wang J. Investigation into the topology optimization for conductive heat transfer based on deep learning approach. Int Commun Heat Mass Transf. 2018;97(3):103–9. doi:10.1016/j.icheatmasstransfer.2018.07.001. [Google Scholar] [CrossRef]
138. Wang L, Shi D, Zhang B, Li G, Liu P. Real-time topology optimization based on deep learning for moving morphable components. Autom Constr. 2022;142(1):104492. doi:10.1016/j.autcon.2022.104492. [Google Scholar] [CrossRef]
139. Lee S, Kim H, Lieu QX, Lee J. CNN-based image recognition for topology optimization. Knowl Based Syst. 2020;198(2):105887. doi:10.1016/j.knosys.2020.105887. [Google Scholar] [CrossRef]
140. Xiang C, Wang D, Pan Y, Chen A, Zhou X, Zhang Y. Accelerated topology optimization design of 3D structures based on deep learning. Struct Multidiscip Optim. 2022;65(3):99. doi:10.1007/s00158-022-03194-0. [Google Scholar] [CrossRef]
141. Jeong H, Batuwatta-Gamage C, Bai J, Xie YM, Rathnayaka C, Zhou Y, et al. A complete physics-informed neural network-based framework for structural topology optimization. Comput Meth Appl Mech Eng. 2023;417:116401. doi:10.1016/j.cma.2023.116401. [Google Scholar] [CrossRef]
142. Xiao J, Chen X, Peng J, Wang Q, Liu J. MeshONet: a generalizable and efficient operator learning method for structured mesh generation. Neural Netw. 2026;199(3):108746. doi:10.1016/j.neunet.2026.108746. [Google Scholar] [PubMed] [CrossRef]
143. Zhan W, Chen J, Fu D, Zhou D. UniMate: a unified model for mechanical metamaterial generation, property prediction, and condition confirmation. arXiv:250615722. 2025. [Google Scholar]
144. Wang D, Ning Y, Xiang C, Chen A. A two-stage network framework for topology optimization incorporating deep learning and physical information. Eng Appl Artif Intell. 2024;133(1):108185. doi:10.1016/j.engappai.2024.108185. [Google Scholar] [CrossRef]
145. Seo M, Min S. DL-MSTO+: a deep learning-based multi-scale topology optimization framework via positive definiteness ensured material representation network. Comput Meth Appl Mech Eng. 2023;415(4):116276. doi:10.1016/j.cma.2023.116276. [Google Scholar] [CrossRef]
146. Ihuaenyi RC, Li W, Bazant MZ, Zhu J. Mechanics informatics: a paradigm for efficiently learning constitutive models. J Mech Phys Solids. 2025;203(1):106239. doi:10.1016/j.jmps.2025.106239. [Google Scholar] [CrossRef]
147. Wenzel S, Slomski-Vetter E, Melz T. Optimizing system reliability in additive manufacturing using physics-informed machine learning. Machines. 2022;10(7):525. doi:10.3390/machines10070525. [Google Scholar] [CrossRef]
148. Gallet A, Rigby S, Tallman TN, Kong X, Hajirasouliha I, Liew A, et al. Structural engineering from an inverse problems perspective. Proc Math Phys Eng Sci. 2022;478(2257):20210526. doi:10.1098/rspa.2021.0526. [Google Scholar] [PubMed] [CrossRef]
149. Luo L, Sun L, Li Y, Xia Y. Structural nonlinear boundary condition identification using a hybrid physics data-driven approach. Nonlinear Dyn. 2025;113(9):9605–23. doi:10.1007/s11071-024-10614-x. [Google Scholar] [CrossRef]
150. Shi X, Ding J, Zhao X, Zhan S, Mohapatra P, Quispe D, et al. STEP-LLM: generating CAD STEP models from natural language with large language models. arXiv:2601.12641. 2026. [Google Scholar]
151. Boussuge F, Tierney CM, Vilmart H, Robinson TT, Armstrong CG, Nolan DC, et al. Capturing simulation intent in an ontology: CAD and CAE integration application. J Eng Des. 2019;30(10–12):688–725. doi:10.1080/09544828.2019.1630806. [Google Scholar] [CrossRef]
152. Teke IT, Akbulut M, Ertas AH. Topology optimization and fatigue analysis of a lifting hook. Procedia Struct Integr. 2021;33:75–83. doi:10.1016/j.prostr.2021.10.011. [Google Scholar] [CrossRef]
153. Wang Y, Xiao M, Xia Z, Li P, Gao L. From computer-aided design (CAD) toward human-aided design (HADan isogeometric topology optimization approach. Engineering. 2023;22:94–105. doi:10.1016/j.eng.2022.07.013. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools