
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
A Lane Coordinate Generation Model Utilizing Spatial Axis Attention and Multi-Scale Convolution
School of Automation Science and Electrical Engineering, Beihang University, Beijing, 100191, China
* Corresponding Author: Duo Cui. Email:
Computers, Materials & Continua 2025, 84(1), 417-431. https://doi.org/10.32604/cmc.2025.063507
Received 16 January 2025; Accepted 31 March 2025; Issue published 09 June 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In the field of autonomous driving, the task of reliably and accurately detecting lane markings poses a significant and complex challenge. This study presents a lane recognition model that employs an encoder-decoder architecture. In the encoder section, we develop a feature extraction framework that operates concurrently with attention mechanisms and convolutional layers. We propose a spatial axis attention framework that integrates spatial information transfer regulated by gating units. This architecture places a strong emphasis on long-range dependencies and the spatial distribution of images. Furthermore, we incorporate multi-scale convolutional layers to extract intricate features from the images. The two sets of feature maps are concatenated and subsequently transformed into an input sequence for the decoder, with the lane marking coordinates considered as a target sequence for coordinate generation. This decoder can directly segment multiple lane markings, eliminating the need for additional post-processing algorithms, thereby significantly streamlining the lane recognition process. The proposed method demonstrates a high degree of accuracy in recognizing lane markings and exhibits robust capabilities in differentiating between occlusions and objects resembling lanes. It shows exceptional performance on the TuSimple and CULane datasets.Keywords
The lane detection task represents a fundamental aspect within the domain of computer vision, extensively used in the context of autonomous driving. The main aim of the lane detection task is to recognize and monitor the lane markings on the roadway to ensure proper vehicle navigation. In light of the intricate conditions of the traffic environment, lane markings, which are defined as elongated strip-like features, frequently face disruptions from occlusions, stains, comparable traffic signs, and various other elements in real-world situations, thereby making the task of lane marking detection notably difficult.
The lane detection task typically consists of two main components: feature extraction and post-processing, and can be understood as an encoder-decoder architecture [1]. Within the encoder component, image processing modules, including Convolutional Neural Networks (CNN) [2–5] and Vision Transformers (ViT) [6], are utilized to extract image semantic information. However, CNNs can only capture local information, which is prone to false positives and missed detections due to numerous occlusions in complex traffic conditions. The attention mechanisms can capture global attention information, while introducing significant computational overhead, which may not meet the real-time requirements for lane detection. Within the decoder component, lane detection methods depend on a series of complex post-processing algorithms, including fitting [7], edge detection [8], and image segmentation [9]. These methods require the establishment of independent sub-tasks and loss functions, and during the computation process, they may introduce significant errors.
This paper presents a novel model designed to generate coordinate sequences for lane markings, which is termed ACP2Seq (Attention Multi-Scale Convolution Parallel to Sequence). In the encoder component, we develop an image feature extraction framework that operates in conjunction with spatial axis attention [10] and multi-scale convolution. This design enables the model to focus on the intricate details associated with lane markings, thus mitigating the potential for confusion between lane markings and analogous traffic signs that may be difficult to differentiate. This framework maintains the advantages of the attention mechanism in focusing on global information while keeping computational costs low.
In the decoder component, feature map information is employed as the input sequence, while the coordinates of lane markings act as the target sequence, facilitating a text generation task aimed at sequentially producing the coordinates of lane marking points. In a manner similar to the Pix2Seq model [11], the ACP2Seq model generates coordinate information for targets directly from images. This decoder consists of only one single layer of transformer, which not only features fast computation speed but also facilitates the easy implementation of multi-lane segmentation, thereby avoiding the introduction of additional errors.
To summarize, the primary contributions of this paper are outlined as follows: 1) the proposal of a sequence generation-based lane recognition model, ACP2Seq; 2) the introduction of an image feature extraction module that integrates attention layers and convolutional layers in parallel; 3) the development of a spatial axis attention model that incorporates spatial information transfer; 4) the demonstration of the proposed model’s exceptional performance on multi-lane datasets, affirming the substantial recognition capabilities of the ACP2Seq model under diverse complex road conditions.
The structure of this paper is as follows: Section 2 will review the relevant literature, focusing on existing lane markings recognition techniques and their limitations. Section 3 will provide a detailed description of the proposed ACP2Seq model, including its architecture, key components, and innovative aspects. Section 4 will describe the experimental setup and present the experimental results, comparing them with existing advanced methods to validate the effectiveness of the proposed approach. Finally, Section 5 will summarize the main findings and contributions of the research.
Image processing tasks are typically categorized into two components: the encoder and the decoder. The encoder component is primarily utilized for feature extraction tasks, typically employing convolution, attention mechanisms, and their enhancement methods. The decoder component typically performs subsequent processing tasks in accordance with the specified task objectives.
A variety of methodologies for the extraction of features from lane images are already present within the encoder component. In addition to widely recognized models such as U-Net [12] and ENet [13], numerous researchers have implemented specific enhancements to address the distinctive semantic characteristics of long-lane markings. This includes models such as SCNN [14], RESA [15], and CondLaneNet [16], which employ spatial convolution techniques to facilitate the propagation of information across rows and columns. These methods significantly enhance the capability of lane line recognition, thereby affirming the importance of spatial characteristics in the task of lane markings detection. Nonetheless, the ability of CNN to extract local features via the application of convolutional kernels is constrained in modeling long-range dependencies. Their recognition capability diminishes when confronted with targets that exhibit multiple occlusions.
In response to the aforementioned challenges, the transformer model [17] has been proposed. The transformer model is capable of capturing global dependencies across all positions within the input sequence, which allows it to demonstrate significant processing capabilities for images characterized by long-range dependencies. Dosovitskiy et al. [6] transformed images into patches to enable global attention computation, whereas Liu et al. [18] validated the improved capabilities of attention mechanisms as fundamental networks in image processing. Nevertheless, the computational expense associated with attention mechanisms is considerably elevated when dealing with large input images. In order to decrease the quantity of model parameters, local attention constraints [19] and axis attention mechanisms [10,20] have been introduced sequentially. The axis attention model incorporates an axial structure that highlights long-range dependencies, making it particularly well-suited for lane segmentation tasks. Wang [21] utilized axis attention to conduct position-sensitive attention operations, showcasing robust segmentation performance acrossvarious datasets, while also confirming the reliance of images on axial information. This feature extraction method relies on axis attention calculations and is highly suitable for lane recognition tasks. However, due to the lack of complete information from the images, its ability to infer the orientation of lane markings remains insufficient. This paper presents an improved spatial axial attention model based on axial attention, which has a lower computational complexity and incorporates global information.
In the decoder component, traditional lane recognition tasks typically involve the semantic segmentation of lane markings. However, with the introduction of the Pix2Seq model [11], Dr. Chen and others have transformed target recognition tasks into sequence generation tasks. They transformed image coordinate information into an embedded matrix allows for direct text generation based on image features. This model presents greater possibilities for image processing tasks. This framework exhibits high adaptability for lane marking recognition tasks, which are primarily aimed at extracting coordinate points. Consequently, the Lane2Seq model [22] was proposed, establishing lane marking recognition as a sequence generation task for the first time. This model also establishes a unified paradigm for novel lane recognition approaches and demonstrates robust capabilities in the lane recognition task. This paradigm allows for the easy segmentation of multiple lane markings using a simple transformer layer, without introducing additional computational overhead or bias, thereby avoiding the cumbersome modeling processes associated with complex post-processing tasks for lane lines. The decoder framework employed in this paper also utilizes this architecture.
As elaborated in Section 1, the recognition of lane markings has seen significant enhancements due to progress in the field of computer vision. Nevertheless, traffic conditions frequently exhibit increased complexity, as one must not only navigate through various obstructions on the roadway but also contend with barriers, traffic signs, walls, and other objects that may mimic lane markings. In the feature extraction phase, we establish a structure for feature extraction that integrates attention layers and convolutional layers in parallel. This framework addresses the long-range dependencies associated with lane markings while clearly distinguishing lane markings from similar interfering objects, consequently minimizing the chances of erroneously classifying other traffic signs as lane markings. Following the outcomes of feature extraction, we produce a sequence of textual representations pertaining to the coordinates of lane markings. The proposed method demonstrates strong capabilities in recognizing lane markings, even within intricate traffic scenarios.
3.1 Overall Network Architecture
This paper introduces a lane marking recognition model referred to as ACP2seq, as depicted in Fig. 1. The model is fundamentally composed of two integral components: the encoder and the decoder. The encoder component incorporates a parallel spatial axis attention module alongside a multi-scale convolution module, where features are concatenated via self-attention mechanisms. The encoder is primarily used for extracting image features. In the decoder, the model performs a text generation task based on the results of feature extraction and the sequence of lane line coordinates, enabling the recognition and segmentation of multiple lanes.
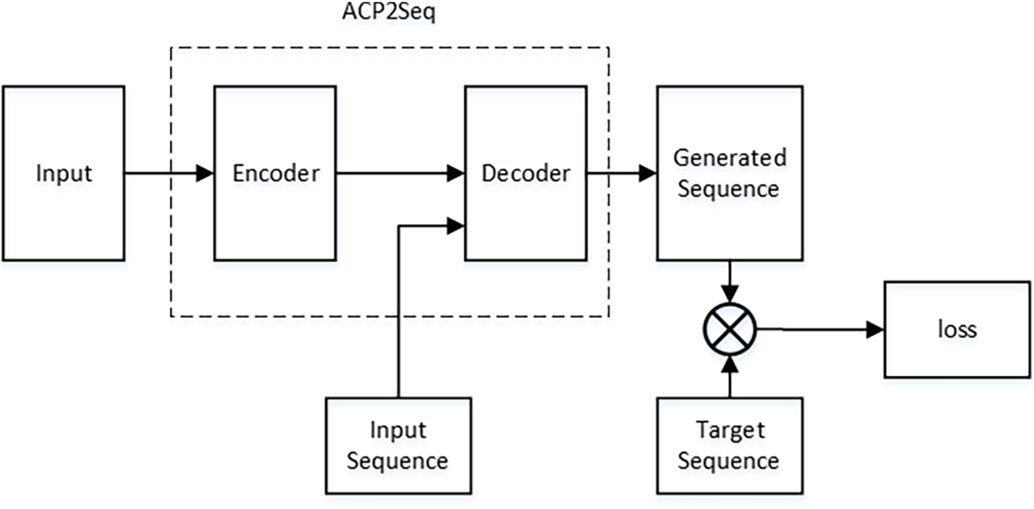
Figure 1: ACP2Seq model framework
Attention mechanisms and convolutional structures are currently among the most frequently employed techniques in the field of image processing. Attention mechanisms are capable of emphasizing the overarching characteristics of images and proficiently managing the long-range dependencies present within them. Conversely, convolutional structures focus on local features, facilitating the enhanced extraction of intricate details within images.
The advent of transformers facilitates the effective integration of information from diverse sources. The decoder architecture enables the integration of information across various modalities. In the decoder architecture, each input element engages in unrestricted interactions with other elements, facilitating the interrelation of data from different sources and modalities to generate the final output. This unique decoder architecture allows the encoder to produce more comprehensive and varied data outputs. Ultimately, this integration enables the attention mechanism and convolutional architecture to collaboratively capture image feature information within the ACP2Seq model.
This study introduces an innovative architecture within the encoder section that combines spatial axis attention with parallel multi-scale convolution. The axis attention module effectively captures global information from the image and establishes long-range dependencies, thereby enhancing the recognition of lane markings in a smooth and coherent manner. The multi-scale convolution highlights the intricate details of the image, facilitating the distinction between lane markings and analogous traffic signs. The architecture of the model is depicted in the Fig. 2.
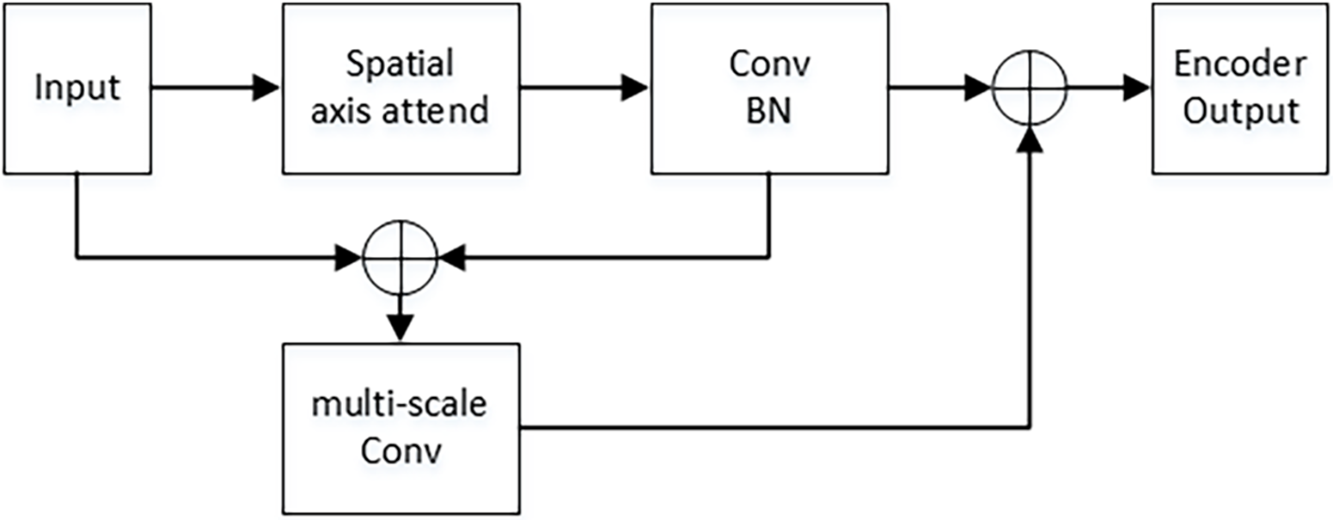
Figure 2: Encoder framework
In the conventional ViT architecture, every patch engages in attention calculations with all other patches within the image. This process, however, leads to a considerable computational load. The enhanced Swim architecture utilizes a sliding window method to calculate local attention. Nonetheless, for lane markings, which exhibit elongated linear features, axis attention proves to be more effective in addressing such linear structures.
Axis attention mitigates complexity through the decomposition of input data into various axes, enabling the calculation of attention in a distinct manner for each column. It significantly enhances the feasibility of processing extensive datasets. In axis attention operations, the information acquired by each patch is constrained to the patches located in the corresponding row and column. This approach significantly reduces the computational load of the model.
The axial attention model reduces computational complexity. Consider an input feature map
The spatial axial attention model developed in this research is depicted in Fig. 3. In contrast to conventional axis attention frameworks, the spatial axis attention architecture introduced in this research sequentially processes the feature map after executing axial slicing. The outcome of the attention computation for each slice is processed through a gating unit and subsequently incorporated into the original data of the following slice, thereby serving as the input for the attention computation of the next slice. The transfer of spatial information facilitates an expanded receptive field for distinct patches. Moreover, regarding the distinct linear structure of lane markings, this sequential transfer of information between axes allows the model to concentrate more on the elongated shape characteristics of the image. This feature demonstrates a significant level of adaptability for lane marking recognition.
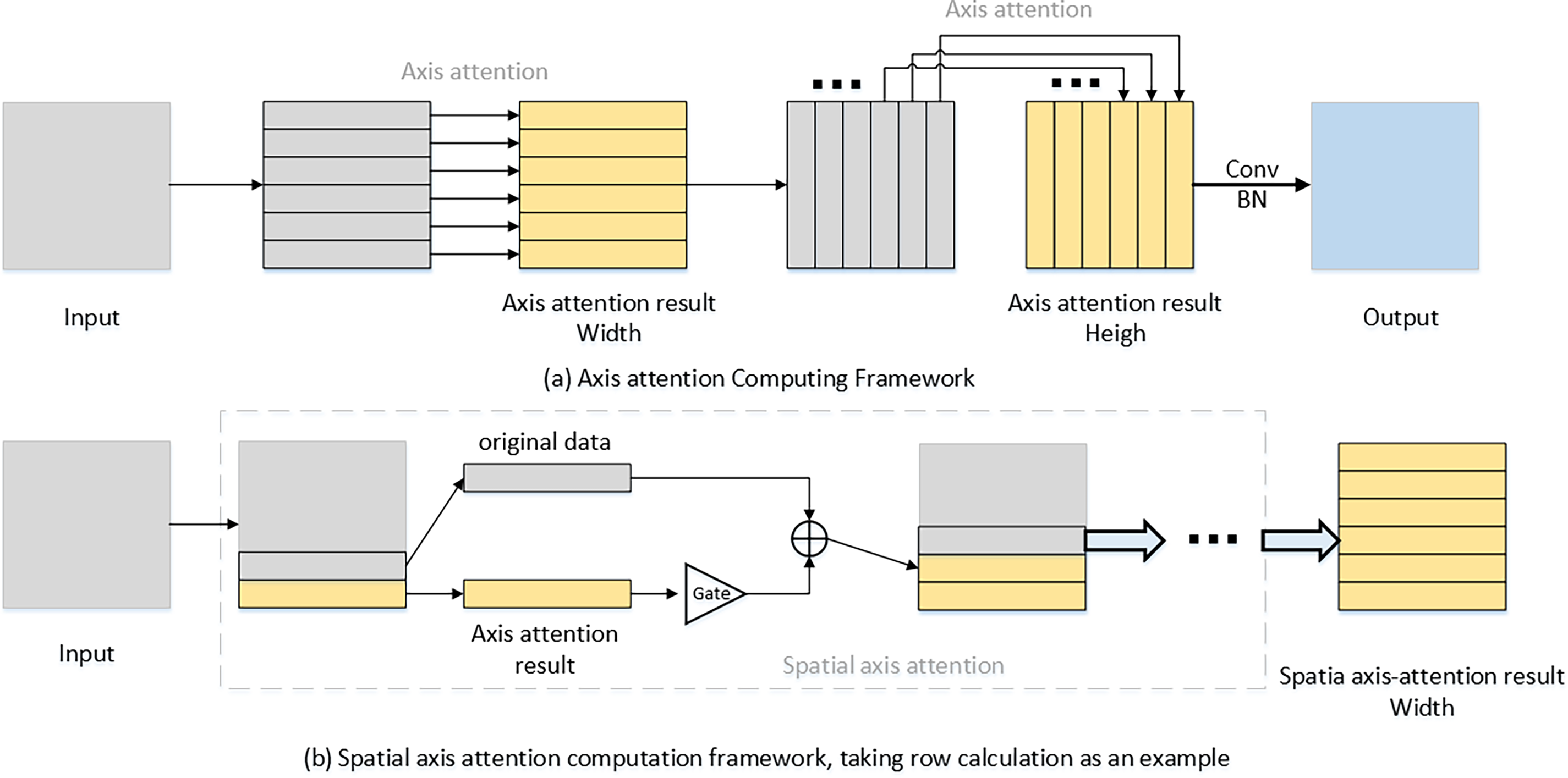
Figure 3: Differences in the structure of axis attention and spatial axis attention models
This paper additionally presents a gating unit structure designed to regulate the output results of each slice. The gating unit is characterized as a learnable variable that governs the output results via attenuation control. This guarantees that for any specified patch, the impact of the axis slices in proximity to it is more significant. This gating unit structure facilitates the continuous attenuation of spatial information throughout transmission, consequently diminishing the influence of extraneous information. The receptive field of the spatial axial attention structure developed in this study is depicted in Fig. 4.
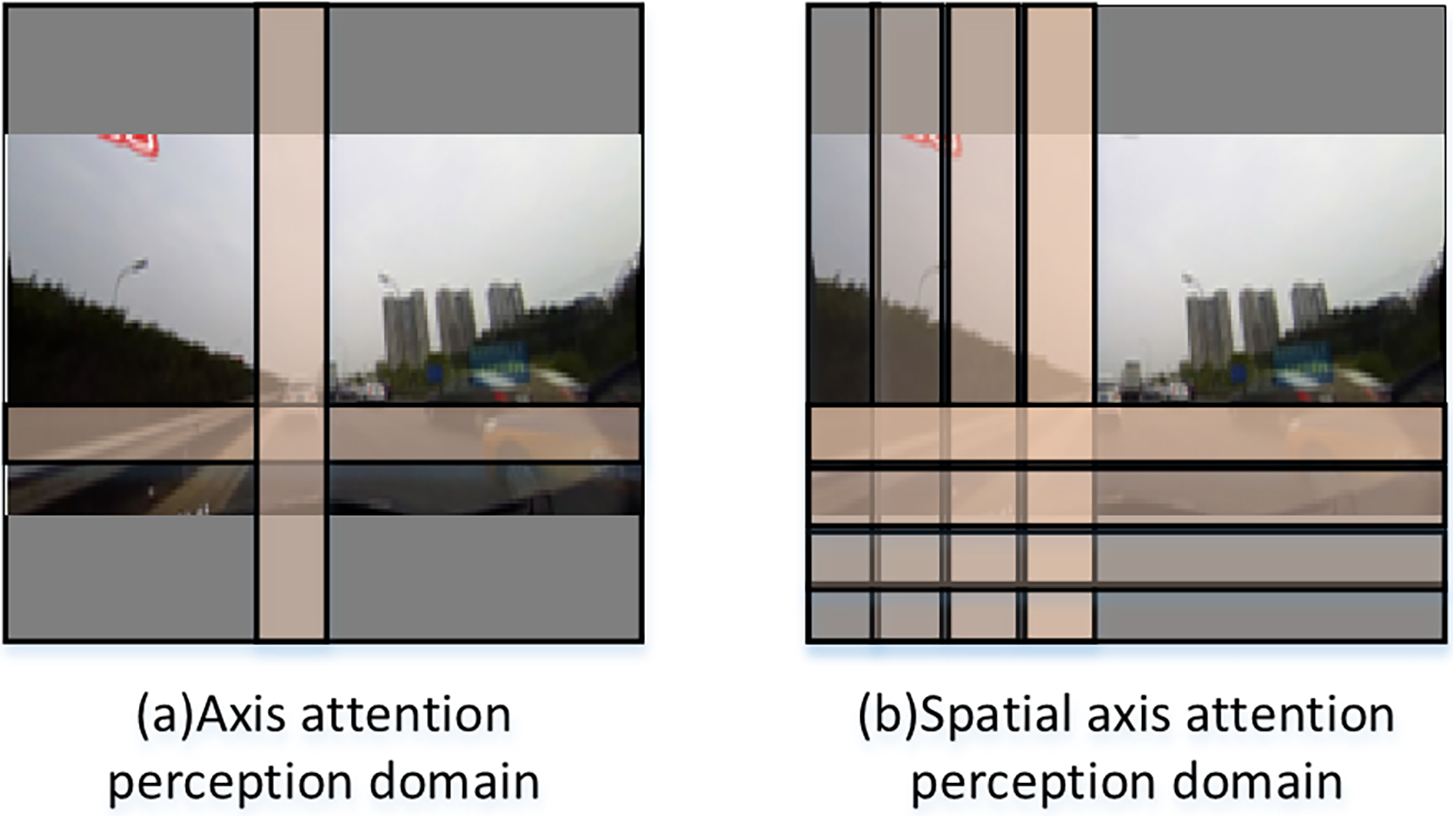
Figure 4: Difference between axis attention and spatial axis attention perception domain
Given an input feature map
where N represent the whole location lattice,
This paper uses position-sensitive attention as a means of enhancement [10]. The position-sensitive attention introduces the incorporation of positional and significantly improves the model’s capacity to comprehend both the relative and absolute positions of elements within the input data. The output at
where N represents the operational area of size
Upon the introduction of spatial positional information, the computed data for the initial row and column of the image remains constant, whereas the attention mechanisms for the remaining positions incorporate the output from a preceding sequence into the input of the original image, while also integrating gating units to mitigate the output. The spatial attention formula is articulated in Eq. (3).
where the
The computation flowchart of position-sensitive attention is shown in Fig. 5. It effectively captures the positional information of each element within the input sequence, thereby enhancing its ability to comprehend the semantic relationships in images, particularly in cases where the sequences are relatively lengthy and the order relationships are more pronounced.
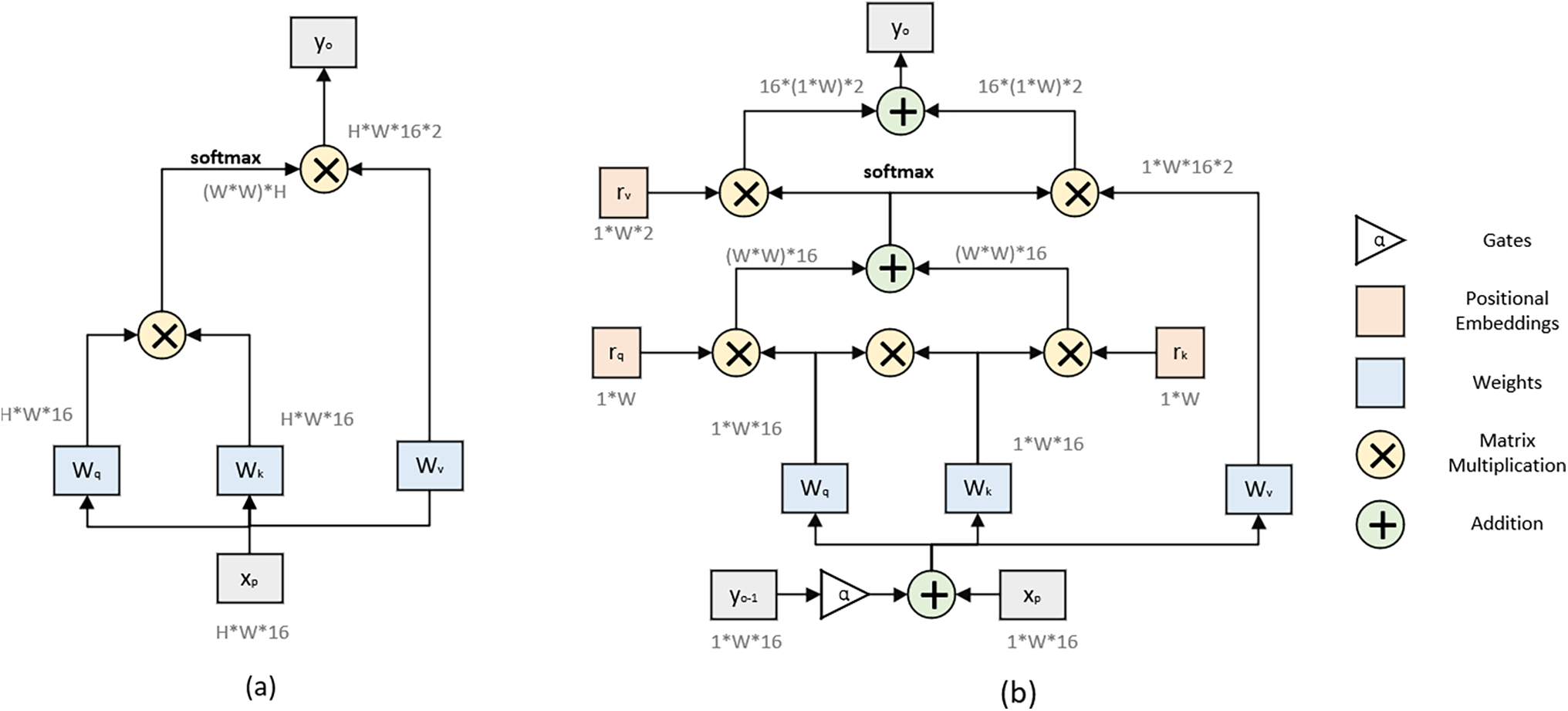
Figure 5: A non-local attention (a) vs. position-sensitive axial-attention applied along the width-axis (b)
Multi-scale convolution generally utilizes a range of convolutional kernels with different dimensions to facilitate feature extraction. The convolutional kernels of varying dimensions are capable of capturing features at multiple scales within the image. This enhances the model’s comprehension and processing of input data characterized by diversity and complexity.
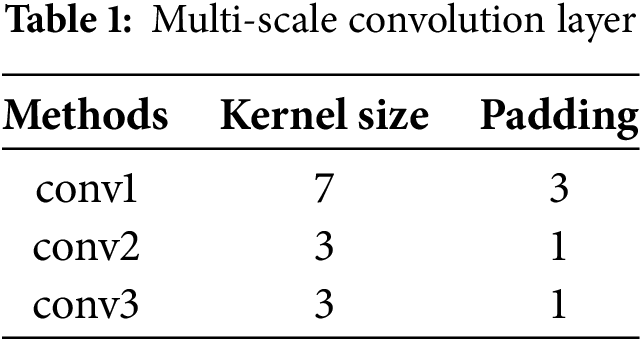
This study presents a feedforward component that employs feature layers derived from spatial axial attention, functioning as an additional channel. A multi-scale convolution layer is structured as depicted in Table 1, consisting of four convolutional layers with kernel sizes of
The decoder predominantly performs functions associated with text generation. The target sequence of the decoder component consists of distinct coordinate points that denote the lane markings. By considering these coordinate points as textual data, the task of lane recognition can be redefined as a text generation task. The design of the encoder component is depicted in Fig. 6.
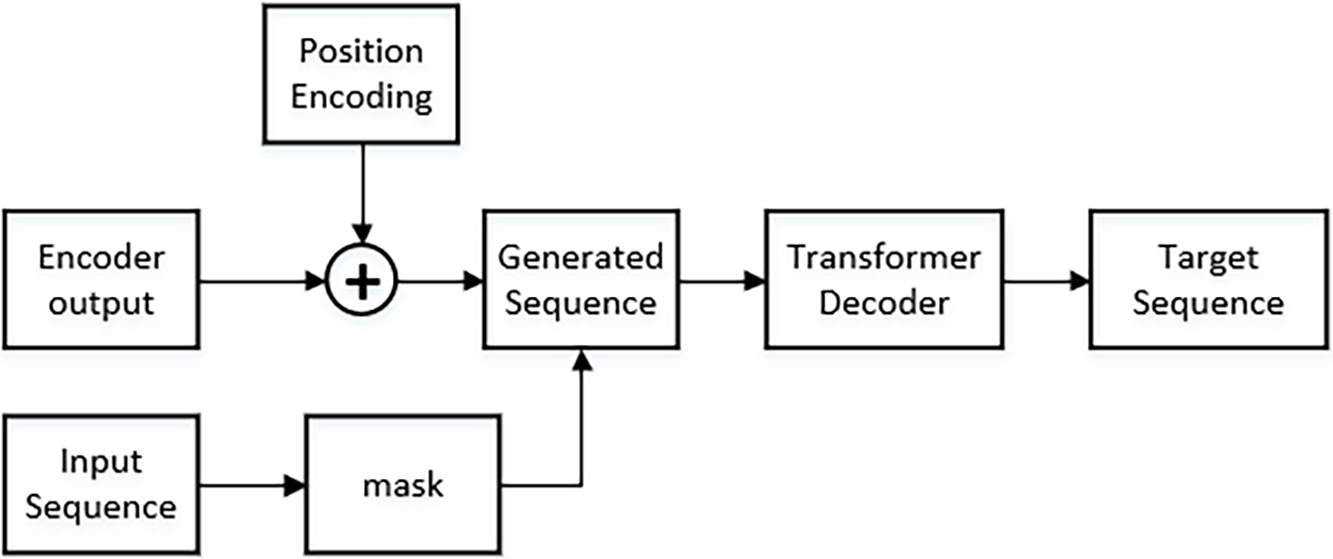
Figure 6: Decoder framework
The decoder component of ACP2Seq performs a text generation task, while the encoder component, as detailed in Section 3.2, extracts image features to form the input sequence. The coordinate points of lane markings, along with the position markers, form the target sequence.
The target sequence is composed of a series of sequential coordinate points, which are represented in the format [start, x0, y0, x1, y1,..., xn, yn, end, start, x0, y0,...]. In this context, “start” refers to the initial point of a lane, whereas “end” indicates the concluding point of that particular lane. The application of this flag information facilitates the integration of various lane markings into a unified collection of target sequence data. The dimensions of the embedded matrix corresponding to the target sequence are consistent with the dimensions of the image, and there exists a correlation between the sequence length, the number of lanes, and the length of the lane point set. In order to address the issue of sequence length, this research utilizes uniform sampling on the coordinate points and implements polynomial fitting to effectively replicate the lane markings.
This study utilizes the cross-entropy function as the objective function to evaluate the similarity between the target sequence and the generated sequence. The formulation of the cross-entropy function is delineated in Eq. (4); its objective is to optimize the likelihood of the produced tokens in conjunction with the subsequent target tokens.
where
We conduct experiments on two classic lane markings detection datasets: CULane [14] and Tusimple [23].
CULane is a widely utilized large-scale dataset for lane detection. It encompasses numerous challenging scenarios, including crowded roads, night scenes, and adverse weather conditions. The CULane dataset comprises 88.9 K images for training, 9.7 K images in the validation set, and 34.7 K images for testing. All images have a resolution of
Tusimple is a real-world highway dataset. It contains authentic driving scene images captured from U.S. highways, along with corresponding lane line annotation information. The Tusimple dataset comprises 3626 images for training, 358 images in the validation set and 2782 images for testing. All images have a resolution of
For CULane dataset, we adopt the F1 score to measure the performance. F1 score is the harmonic mean of precision and recall.:
For Tusimple dataset, we use the F1 score, accuracy, FP, and FN to evaluate the model performance. Accuracy is defined as
Model: The patch size is established as
Training: All images are resized to
Experimental environment: Windows 10 operating system, Intel Core i7-8700 CPU at 3.19 GHz, 32 GB RAM, and NVIDIA GTX 2070 Ti.
4.4 Comparison with the State-of-the-Art Methods
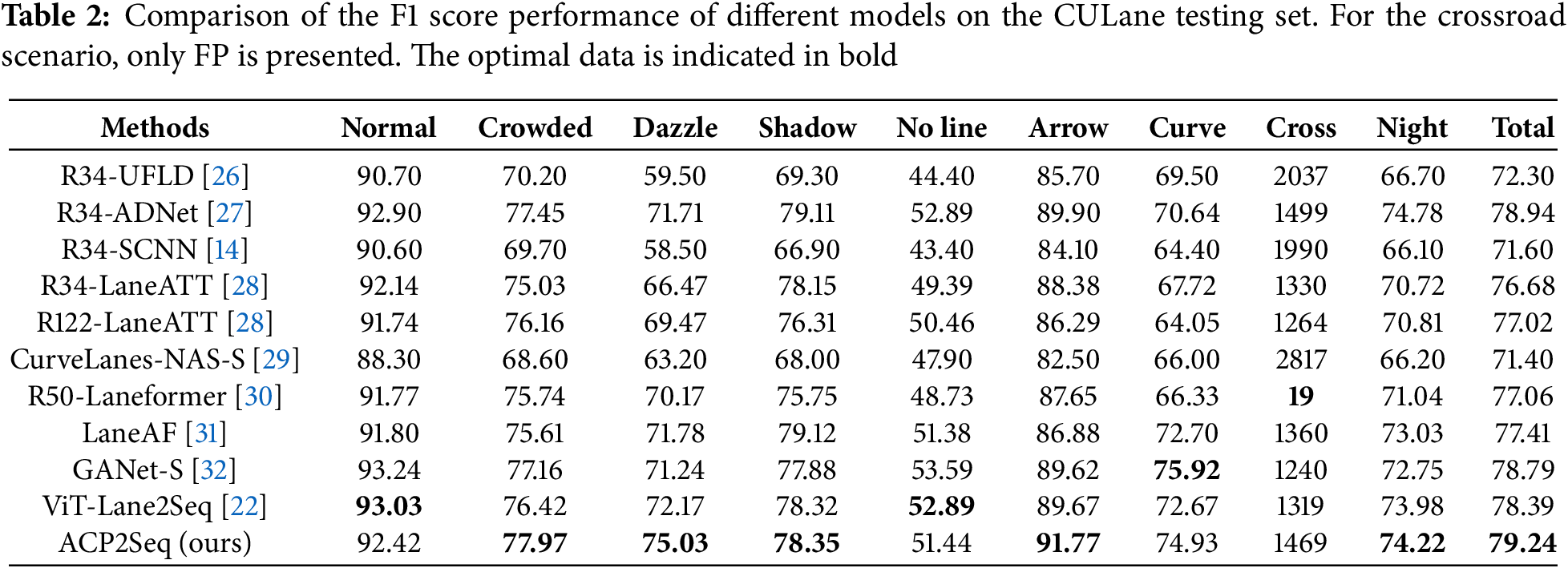
Evaluation of performance on CULane. This study presents a comparison of the ACP2Seq model against other leading methodologies utilizing the CULane dataset, with the findings detailed in Table 2. The ACP2Seq model demonstrated a commendable F1 score across the four scenarios of the CULane dataset: Crowded, Dazzle, Arrow, and Night. When juxtaposed with the Lane2Seq model that employs ViT as the encoder, the proposed model utilizing ACP-Attend as the encoder enhanced the CULane score from 78.39% to 79.24%, thereby showcasing remarkable performance in lane markings recognition within the context of single-scale detection.
Due to the reduction in computational complexity achieved by the spatial axis attention mechanism in the encoder and the simple structure of the decoder, which consists of only one layer of transformer, the ACP2Seq model proposed in this study can be trained at a rate of 23 FPS (Frames Per Second). This operational speed significantly exceeds that of models such as LaneNet and SCNN but remains lower than the image processing rate of over 50 FPS characteristic of the Enet model.
The results of lane detection are presented in Fig. 7. The ACP2Seq model exhibited strong capabilities in detecting lane markings across the CULane datasets, while sustaining effective inference performance in challenging environments, such as night time and congested conditions. Moreover, when evaluated against alternative models, the ACP2Seq model demonstrates a superior capability to differentiate between lane markings and linear traffic objects, including guardrails and walls. Both LaneATT and Lane2Seq (ViT) have instances of misidentifying other markers as lane lines; however, the model proposed in this paper effectively addresses this issue.
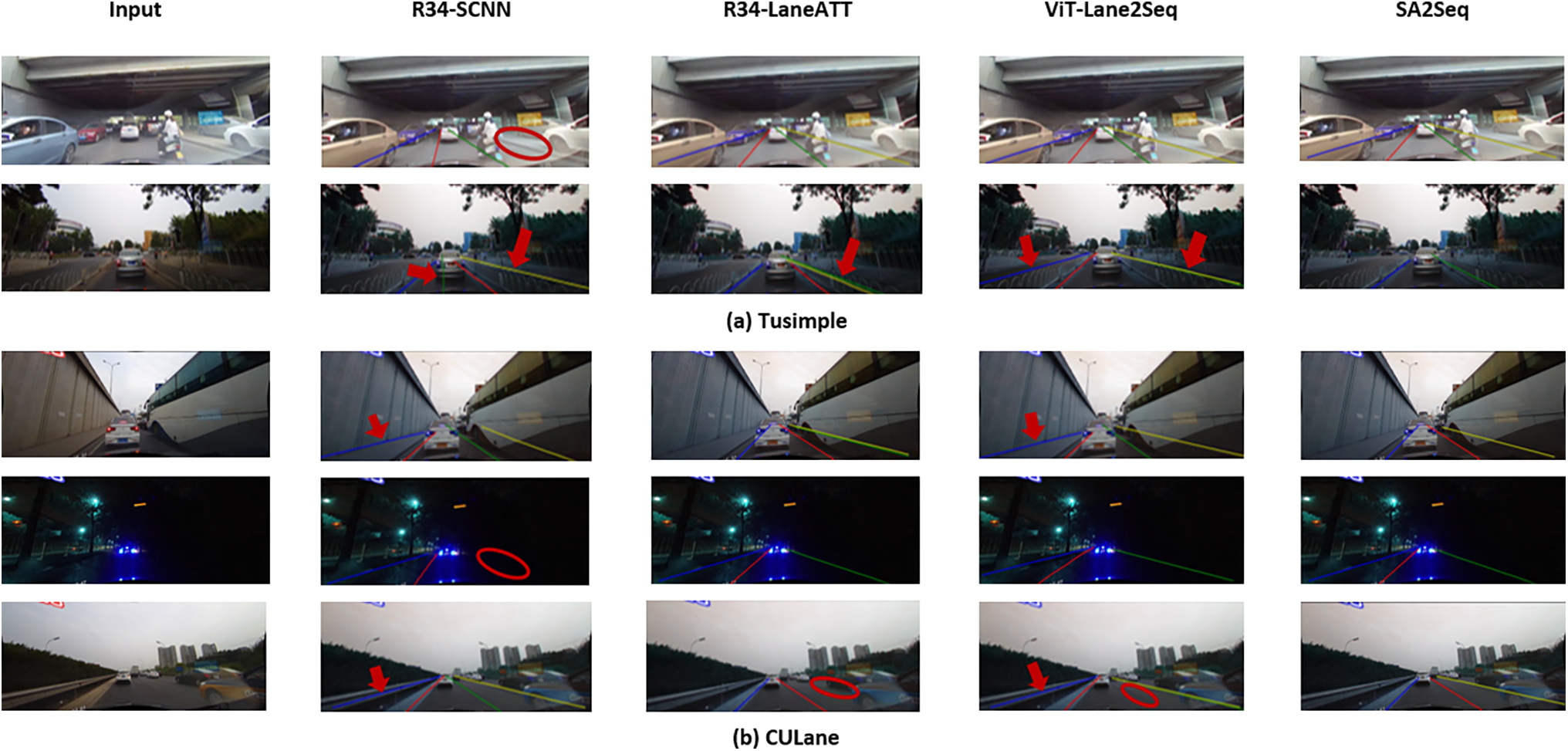
Figure 7: Visualization results of SCNN, LaneATT, Lane2Seq, ViT-Lane2Seq and ACP2Seq on Tusimple and CULane, where the red arrows indicate false positives and the red circles represent false negatives
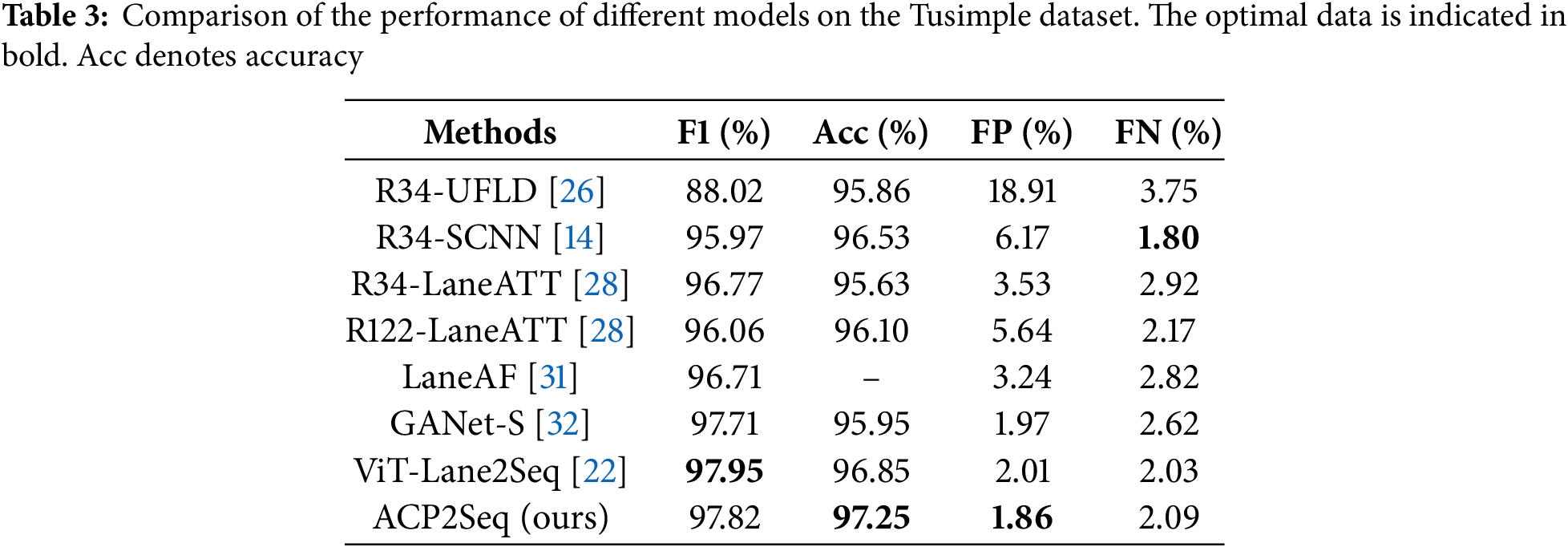
Evaluation of performance on Tusimple. This study conducts a comparative analysis of the ACP2Seq model against alternative methodologies utilizing the TuSimple dataset, with the findings detailed in Table 3 and Fig. 7. On the Tusimple dataset, ACP2Seq also demonstrates the ability to effectively distinguish between lanes and guardrails, thereby facilitating precise lane marking recognition. The ACP2Seq model demonstrated an impressive accuracy of 97.25% alongside a minimal false positive rate of 1.86%. Nevertheless, owing to the limited size and relatively consistent characteristics of the TuSimple dataset, the enhancement of the model is not significant. It still validates the strong lane line recognition capability of the model proposed in this study.
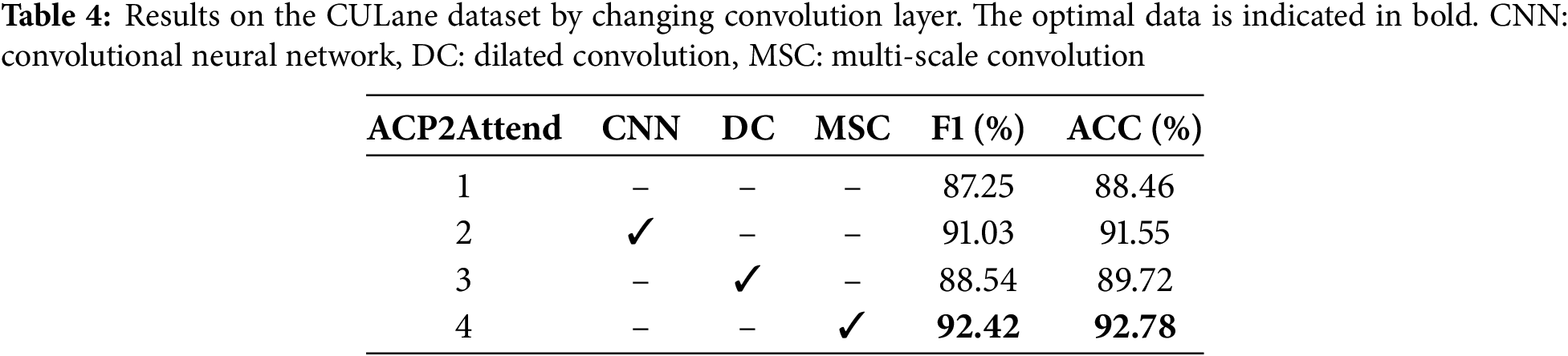
Ablation experiments are conducted on the CULane dataset to assess the effectiveness of each component. This research focuses on the standard subset of the CULane dataset, analyzing the recognition outcomes of models that incorporate convolution as a parallel architecture against those that do not, in order to enhance feature extraction within the encoder framework. Furthermore, it evaluates the recognition accuracy and F1 scores of various convolutional architectures, such as standard convolution, dilated convolution, and multi-scale convolution, as sources of parallel information. The findings are delineated in Table 4. The incorporation of convolutional structures clearly improves the model’s capacity to extract features from images. Among the various convolutional architectures, multi-scale convolution demonstrates superior recognition performance. This suggests that multi-scale convolution effectively captures more intricate details.
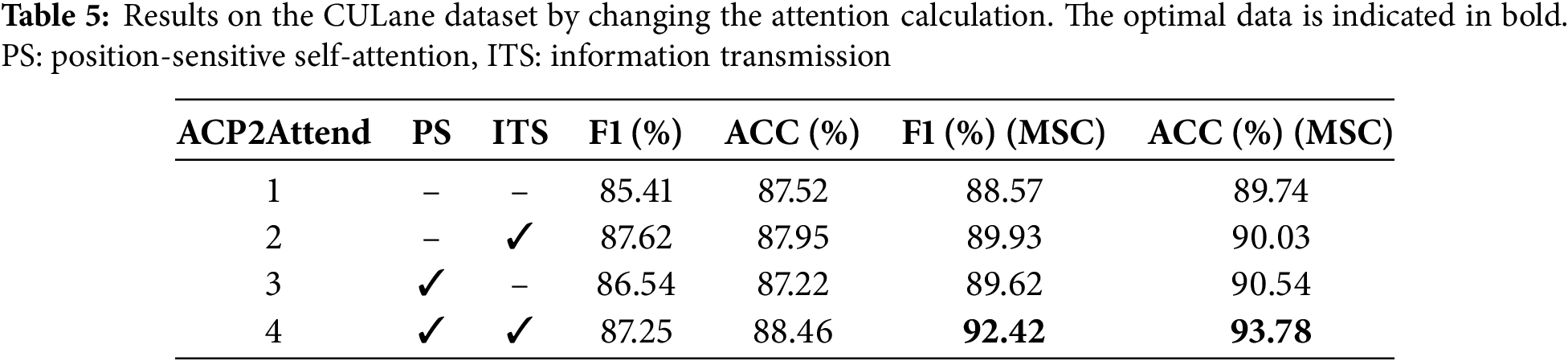
This study examines the effects of employing position-sensitive attention and the information transmission architecture on the model, utilizing the standard subset of the CULane dataset. The findings are illustrated in Table 5. The transfer of inter-axis information markedly improves the model’s recognition performance; nonetheless, a pure axis attention model continues to exhibit effective performance in lane line extraction. This indicates that a significant quantity of information is contained within the inter-axis data of the horizontal and vertical axes. The transfer of inter-axis information significantly enhances the accuracy of the model’s recognition capabilities. Additionally, Table 5 presents the results of fusion ablation experiments incorporating multi-scale convolution (MSC), demonstrating that the combined effects of multi-scale convolution and axis attention facilitate the precise recognition of lane markings.
This study proposes a lane markings extraction model, ACP2Seq. In the encoder component, this study presents a parallel feature extraction module that integrates spatial axis attention alongside multi-scale convolution techniques. The spatial axis attention structure is designed to enhance the model’s perceptual capabilities through the combination of global attention and inter-axis information transfer. This framework systematically divides and analyzes images along both the horizontal and vertical dimensions, computing position-sensitive attention for each segment and transferring the information through the gating mechanism. Multi-scale convolution is used to supplement detailed information at different scales to enhance the model’s recognition capabilities. In the decoder component, this paper considers lane marking coordinate points as target sequences in the framework of a sequence generation task, employing markers to distinguish between different lanes. In the process of achieving lane line detection, it concurrently accomplishes the segmentation of multiple lane markings.
This module illustrates robust segmentation inference capabilities for lane markings. The model demonstrates extremely strong recognition capabilities and high operating speed on both the Tusimple and CULane datasets. Compared to other lane detection models, ACP2Seq is more adept at capturing the morphological features of lane markings. ACP2Seq is better at avoiding confusion between lane markings and interfering objects such as roadside barriers, wall edges, and directional arrows, thereby reducing the occurrence of misidentifications. Due to the large receptive field provided by the attention mechanism, the model can effectively cope with disturbances in dark or complex environments, thereby avoiding both missed detections and false positives. Additionally, due to the use of a computationally efficient axial attention structure in the encoder and a simple single-layer transformer structure in the decoder, this model demonstrates a significantly higher frame rate compared to models such as LaneATT and SCNN. The model operates at a faster speed, ensuring better real-time performance. This robust discriminative capability significantly enhances the model’s reliability, enabling it to distinguish and recognize lane lines with greater precision in complex environments.
However, in scenarios where the number of lane markings exceeds five or where the curvature of the lane markings is excessively high, the length of the generated text sequences can become significantly longer. This results in a slowdown of the model’s processing speed, indicating a need for further optimization and modification. Additionally, for the model to be effectively applied within the Internet of Vehicles, it is essential to implement embedded migration and adaptation of the model to facilitate real-world applications.
Acknowledgement: Not applicable.
Funding Statement: Duo Cui reports financial support was provided by Ministry of Education Higher Education Industry University Research Innovation Fund Special Project. If there are other authors, they declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Author Contributions: Duo Cui: Conceptualization, methodology, software, etc. Qiusheng Wang: Formal analysis, resources, investigation, etc. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data openly available in a public repository. The data that support the findings of this study are openly available in Tusimple dataset at http://doi.org/10.1109/ICCV.2019.00110 and Culane dataset at http://doi.org/10.1109/ICCV.2019.00112.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
Abbreviations
| CNN | Convolutional Neural Networks |
| ViT | Vision Transformers |
| ACP2Seq | Attention Multi-Scale Convolution Parallel to Sequence |
| TP | True Positive |
| FP | False Positive |
| FN | False Negative |
| MSC | Multi-Scale Convolution |
| DC | Dilated Convolution |
| PS | Position-Sensitive Self-Attention |
| ITS | Information Transmission |
References
1. Chen LC, Zhu Y, Papandreou G, Schroff F, Adam H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In: Proceedings of the European Conference on Computer Vision (ECCV); 2018. p. 801–18. [Google Scholar]
2. Jégou S, Drozdzal M, Vazquez D, Romero A, Bengio Y. The one hundred layers tiramisu: fully convolutional DenseNets for semantic segmentation. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops; 2017. p. 11–9. [Google Scholar]
3. Chen L, Papandreou G, Schroff F, Adam H. Rethinking atrous convolution for semantic image segmentation. arXiv:1706.05587. 2017. [Google Scholar]
4. Chen LC, Papandreou G, Kokkinos I, Murphy K, Yuille AL. DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs. IEEE Trans Pattern Anal Mach Intell. 2018;40(4):834–48. doi:10.1109/TPAMI.2017.2699184. [Google Scholar] [PubMed] [CrossRef]
5. Howard AG, Zhu M, Chen B, Kalenichenko D, Wang W, Weyand T, et al. MobileNets: efficient convolutional neural networks for mobile vision applications. arXiv:1704.04861. 2017. [Google Scholar]
6. Dosovitskiy A, Beyer L, Kolesnikov A, Weissenborn D, Zhai X, Unterthiner T, et al. An image is worth 16 × 16 words: transformers for image recognition at scale. arXiv:2010.11929. 2020. [Google Scholar]
7. Neven D, De Brabandere B, Georgoulis S, Proesmans M, Van Gool L. Towards end-to-end lane detection: an instance segmentation approach. In: 2018 IEEE Intelligent Vehicles Symposium (IV); 2018; IEEE. p. 286–91. [Google Scholar]
8. Kim J, Lee M. Robust lane detection based on convolutional neural network and random sample consensus. In: Neural information processing. Cham: Springer International Publishing; 2014. p. 454–61, 489. [Google Scholar]
9. Gopalan R, Hong T, Shneier M, Chellappa R. A learning approach towards detection and tracking of lane markings. IEEE Trans Intell Transport Syst. 2012;13(3):1088–98. doi:10.1109/TITS.2012.2184756. [Google Scholar] [CrossRef]
10. Ho J, Kalchbrenner N, Weissenborn D, Salimans T. Axial attention in multidimensional transformers. arXiv:1912.12180. 2019. [Google Scholar]
11. Chen T, Saxena S, Li L, Fleet DJ, Hinton GE. Pix2seq: a language modeling framework for object detection. arXiv:2109.10852. 2021. [Google Scholar]
12. Ronneberger O, Fischer P, Brox T. U-Net: convolutional networks for biomedical image segmentation. arXiv:1505.04597. 2015. [Google Scholar]
13. Paszke A, Chaurasia A, Kim S, Culurciello E. ENet: a deep neural network architecture for real-time semantic segmentation. arXiv:1606.02147. 2016. [Google Scholar]
14. Pan X, Shi J, Luo P, Wang X, Tang X. Spatial as deep: spatial CNN for traffic scene understanding. In: Proceedings of the AAAI Conference on Artificial Intelligence; 2018. Vol. 32. [Google Scholar]
15. Zheng T, Fang H, Zhang Y, Tang W, Yang Z, Liu H, et al. RESA: recurrent feature-shift aggregator for lane detection; 2021. arXiv:2008.13719. 2021. [Google Scholar]
16. Liu L, Chen X, Zhu S, Tan P. CondLaneNet: a top-to-down lane detection framework based on conditional convolution. arXiv:2105.05003. 2021. [Google Scholar]
17. Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez AN, et al. Attention is all you need. Advances in Neural Information Processing Systems. 2017;30:5998–6008. [Google Scholar]
18. Liu Z, Lin Y, Cao Y, Hu H, Wei Y, Zhang Z, et al. Swin transformer: hierarchical vision transformer using shifted windows. arXiv:2103.14030. 2021. [Google Scholar]
19. Hassani A, Walton S, Li J, Li S, Shi H. Neighborhood attention transformer. arXiv:2204.07143. 2023. [Google Scholar]
20. Valanarasu JMJ, Oza P, Hacihaliloglu I, Patel VM. Medical transformer: gated axial-attention for medical image segmentation. arXiv:2102.10662. 2021. [Google Scholar]
21. Wang H, Zhu Y, Green B, Adam H, Yuille AL, Chen L. Axial-DeepLab: Stand-alone axial-attention for panoptic segmentation; 2020. arXiv:2003.07853. 2020. [Google Scholar]
22. Zhou K. Lane2Seq: towards unified lane detection via sequence generation. arXiv:2402.17172. 2024. [Google Scholar]
23. TuSimple. TuSimple benchmark. [cited 2025 Mar 30]. Available from: https://github.com/TuSimple/tusimple-benchmark. [Google Scholar]
24. Loshchilov I, Hutter F. Fixing weight decay regularization in adam. arXiv:1711.05101. 2017. [Google Scholar]
25. He K, Zhang X, Ren S, Sun J. Deep residual learning for image recognition. arXiv:1512.03385. 2015. [Google Scholar]
26. Qin Z, Wang H, Li X. Ultra fast structure-aware deep lane detection. 2020. arXiv:2004.11757. [Google Scholar]
27. Xiao L, Li X, Yang S, Yang W. ADNet: lane shape prediction via anchor decomposition. arXiv:2308.10481. 2023. [Google Scholar]
28. Tabelini L, Berriel R, Paixão TM, Badue C, Souza AFD, Oliveira-Santos T. Keep your eyes on the lane: real-time attention-guided lane detection. arXiv:2010.12035. 2020. [Google Scholar]
29. Xu H, Wang S, Cai X, Zhang W, Liang X, Li Z. CurveLane-NAS: unifying lane-sensitive architecture search and adaptive point blending. arXiv:2007.12147. 2020. [Google Scholar]
30. Han J, Deng X, Cai X, Yang Z, Xu H, Xu C, et al. Laneformer: object-aware row-column transformers for lane detection. arXiv:2203.09830. 2022. [Google Scholar]
31. Yang J, Zhang L, Lu H. Lane detection with versatile atrousformer and local semantic guidance. Pattern Recognit. 2023;133(3):109053. doi:10.1016/j.patcog.2022.109053. [Google Scholar] [CrossRef]
32. Wang J, Ma Y, Huang S, Hui T, Wang F, Qian C, et al. A keypoint-based global association network for lane detection. arXiv:2204.07335. 2022. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools