
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Fixed-Time Bipartite Formation of Multi-Agent Systems Using Dynamic Event-Triggered Scheme
1 Engineering Research Center of Internet of Things Applications Ministry of Education, Jiangnan University, Wuxi, China
2 School of Computing, Engineering and the Built Environment, Edinburgh Napier University, Edinburgh, UK
* Corresponding Authors: Huarong Zhao. Email: ; Linbo Xie. Email:
(This article belongs to the Special Issue: Control Theory and Application of Multi-Agent Systems)
Computers, Materials & Continua 2026, 87(3), 57 https://doi.org/10.32604/cmc.2026.075679
Received 06 November 2025; Accepted 10 February 2026; Issue published 09 April 2026
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This paper studies a sampling-based dynamic event-triggered fixed-time bipartite formation algorithm for a class of continuous-time multi-agent systems with communication constraints. First, a periodic sampling mechanism is designed to reduce the system’s communication frequency. Then, a dynamic event-triggered control algorithm based on auxiliary variables is developed for sampled-data systems to further reduce the system’s triggering frequency. Next, to enhance the convergence speed of the dynamic event-triggered control method, a dynamic event-triggered fixed-time bipartite formation control scheme is investigated. Finally, using Lyapunov stability theory, signed graph theory, and relevant inequalities, a rigorous theoretical proof of the stability of the proposed control protocol is provided, and the algorithm’s effectiveness is verified through simulation experiments.Keywords
Due to their flexibility and scalability, multi-agent systems have been widely applied across fields such as spacecraft attitude coordination [1,2], smart grids [3,4], and intelligent transportation [5,6]. Formation control [7–10] is a fundamental problem in the coordination of multi-agent systems, aiming to design distributed control protocols that enable multiple agents to form a desired geometric shape to accomplish complex tasks in challenging environments, such as limited communication bandwidth [11], unknown disturbances [12], and cyber-attacks [13]. Convergence rate is an important performance metric in formation control and remains a topic of active research. In [14–16], asymptotic convergence algorithms were proposed, while in [17–19], finite-time convergence algorithms were presented. Among these, finite-time algorithms converge faster than asymptotic ones. However, the upper bound of the convergence time for finite-time convergence algorithms depends on the system’s initial state. To address the upper bound on convergence time in finite-time consensus algorithms, researchers have begun studying fixed-time convergence algorithms [20]. In [21], a fixed-time formation control algorithm for heterogeneous multi-agent systems with disturbances was proposed. In [22], an adaptive optimal fixed-time output feedback formation algorithm for time-varying scenarios was introduced. In [23], a fixed-time formation control algorithm for uncertain nonlinear multi-agent systems with actuator faults was proposed. In addition, some scholars further developed prescribed-time control approaches [24–26]. Although research on fixed-time formation control algorithms exists, these studies primarily focus on cooperative relationships among agents. Therefore, further research on the competitive relationships among multi-agent systems and on implementing fixed-time formation control for such systems is a meaningful endeavor.
In nature, agents exhibit both cooperative and competitive relationships, as seen in wolf pack hunting. Addressing the cooperation and competition in multi-agent systems, reference [27] first introduced the concept of bipartite consensus. In recent years, researchers have made significant progress in studying bipartite formation in multi-agent systems. In [28], a bipartite formation algorithm for second-order nonlinear multi-agent systems with hybrid pulses was proposed. In [29], a bipartite time-varying formation algorithm for nonlinear multi-agent systems based on disturbance observers was developed. In [30], a fixed-time bipartite time-varying formation tracking algorithm for networked Euler-Lagrange systems was presented. It is noted that although numerous studies have examined bipartite formation control algorithms, few have addressed communication constraints in bipartite formation control for multi-agent systems. Compared with standard consensus problems, bipartite formation issues are more complex because they involve antagonistic relationships and negative weights, which necessitate greater communication and computational resources. Therefore, the main motivation of this paper is to design a fixed-time bipartite formation control algorithm that further reduces communication energy consumption.
In practical applications, continuous controller updates can waste significant communication resources and increase wear on actuators. To overcome these drawbacks, researchers have proposed event-triggered control mechanisms, in which the controller is updated only when event-triggered conditions are met [31,32]. In [33], a data-driven event-triggered bipartite formation control method was designed for nonlinear multi-agent systems with unknown dynamics. In [34], an event-triggered bipartite time-varying formation control method was achieved for linear multi-agent systems with uncertain dynamics. Additionally, to further reduce the number of event triggers, researchers proposed a dynamic event-triggering strategy that introduces a dynamic variable for the static event-triggered strategy, allowing the triggering condition to change over time. In [35], a dynamic event-triggered strategy was proposed for the fixed-time consensus problem, reducing the number of event triggers in the system. In [36,37], bipartite consensus problems for multi-agent systems under dynamic event-triggered control were studied. However, ref. [35] did not account for competitive relationships among agents, and refs. [36,37] achieved only asymptotic consensus. Therefore, research on dynamic event-triggered fixed-time bipartite formation control for multi-agent systems remains highly important.
On the other hand, most control algorithms in [34–37] require continuous information measurement and transmission from the system. However, due to limited onboard communication and the actual hardware’s driving capabilities, achieving real-time sampling and communication is difficult. To address these issues, researchers have combined periodic sampling [38–40] with event-triggered mechanisms, in which the core idea is to sample from continuous systems at specific times, with event detection occurring only on the sampled data. This approach accounts for the practical situation of periodic sensor sampling. It ensures that the minimum event-triggered interval is at least as long as the sampling interval, thereby further eliminating Zeno behavior. Currently, there is limited research on event-triggered consensus in sampled-data multi-agent systems. Reference [41] studied an event-triggered consensus problem for a class of nonlinear multi-agent systems based on sampled data. Reference [42] investigated a finite-time tracking consensus method for second-order multi-agent systems based on sampled data with an event-triggered scheme. Reference [43] formulated an asynchronous control problem of continuous-time positive Markov jump systems with a dynamic event-triggered scheme based on sampled data. However, the designs in [41,42] employ static event-triggered mechanisms, which can result in unnecessary triggering. Although ref. [43] proposed a dynamic event-triggered communication protocol, it did not account for competitive relationships among agents and did not achieve fixed-time consensus. Therefore, researching the dynamic event-triggered fixed-time convergence problem based on sampled data is a meaningful and challenging task.
Based on the above analysis, this paper addresses sampling periods, communication constraints, and fixed-time bipartite formation issues in multi-agent systems by proposing a dynamic event-triggered fixed-time bipartite consensus control algorithm using sampled data. The main contributions are summarized as follows:
(1) Design a periodic sampling mechanism. Compared to the existing algorithm in [36], it can reduce the system’s communication frequency.
(2) Develop a dynamic event-triggered control algorithm based on sampled data to further reduce the communication burden compared with the existing algorithm in [42].
(3) Design a distributed fixed-time bipartite formation control method. Compared with the existing method in [43], the proposed method further accounts for competitive relationships among agents and converges faster.
Notations:
2 Mathematical Preliminaries and Problem Statements
Consider an undirected graph
Lemma 1 ([44]): If there exists a continuous positive definite and radially unbounded function
(1)
(2) For parameters
the system’s origin is globally fixed-time stable, and the settling time is obtained as
Lemma 2 ([27]): If the signed graph
Lemma 3 ([27]): If the signed graph
Lemma 4 ([35]): For
Remark 1: Lemmas 1-4 are used to analyze the stability of the system controlled by our designed method, which is presented later. Moreover, it should be noted that Lemma 2 is a basic property for the signed graph
2.3 System Dynamics Descriptions
Consider a system composed of N agents, where
where
Definition 1: Let
Assumption 1: The communication topology
Remark 2: A structurally balanced graph of the control systems’ communication topology is a basic requirement of the controlled systems to realize bipartite formation control. As given in Section 2.1, this requirement is that all agents can be assigned to two distinct groups. The relationships within the same group are cooperative, but those between different groups are antagonistic. More deities are discussed in [27].
This study is focused on a class of continuous-time multi-agent systems to implement bipartite formation control tasks, where the main challenges are all listed as
(1) How to realize sampling control for the continuous system. Most existing methods are based on continuous systems and assume an infinite communication resource. In fact, when controlling the physical systems, we also need to detect the system and set a sampling time.
(2) How to realize dynamic event-triggered communication for the controlled system. Most existing methods are time-triggered or strictly event-triggered communication strategies, in which the event-triggered conditions are constant. Designing a dynamic event-triggered condition can further reduce the communication frequencies.
(3) How to realize fixed-time bipartite formation control for agents with a competitive relationship. Most existing formation control approaches consider only the cooperative relationships among agents. However, cooperative and competitive relationships coexist. Only considering one of the relationships is insufficient.
The objective of this study is to realize a sampling-based fixed-time dynamic event-triggered bipartite formation control method for a class of continuous-time multi-agent systems with cooperative and competitive relationships.
For the multi-agent systems (4), the control law for the agent
where
To reduce the real-time computation burden of the system, a combined measurement error equation based on periodic sampling is designed as
where
The compact form of Eq. (7) for
where
To further reduce the number of event triggers, the dynamic event-triggered condition for agent
where
where
From Eqs. (9) and (10), we get that
According to reference [35], we consider a function as
when
When the dynamic event-triggered condition (9) is satisfied, the controller updates its value using the neighbor agent’s state at the triggering time. When the triggering condition is not satisfied, the system employs a zero-order holder (ZOH) to maintain the controller’s output at the control value from the previous trigger time.
In summary, a sampling-based dynamic event-triggered fixed-time bipartite formation algorithm is schematically outlined in Fig. 1.
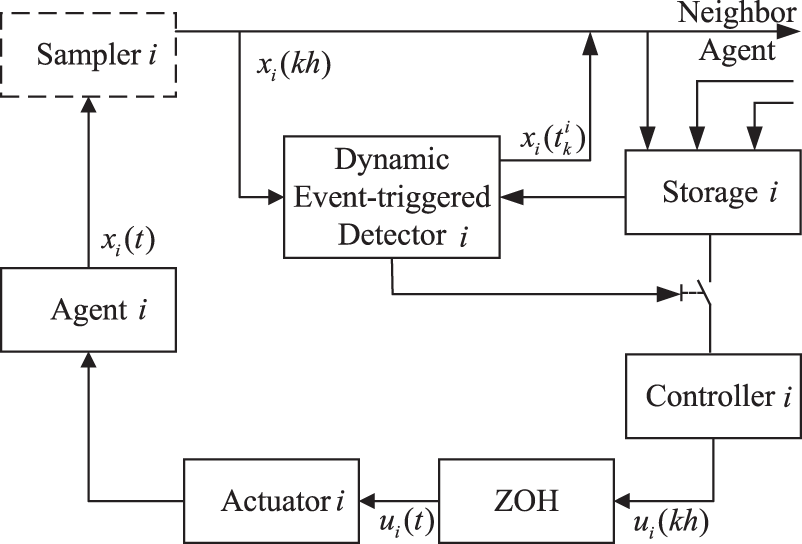
Figure 1: Diagram of the designed control method.
Remark 3: From Eqs. (9) and (10), it is found that the left items
Remark 4: Reference [36] uses continuous state information
Theorem 1: When the following conditions are satisfied:
where
Proof: Consider a Lyapunov function as
Let
Combine Lemma 3 and the following inequality
Then, we obtain that
when conditions (13)–(16) are met, we get that
Combining the dynamic event-triggered condition (9), we obtain that
From Lemma 4, we derive that
and
By substituting Eq. (24) into Eq. (23), we get that
Similarly, we obtain that
Substituting Eqs. (25) and (26) into Eq. (22), and combining them with Lemma 4, we get that
when conditions (15) and (16) are satisfied, we get that
where
From Eq. (28) and Lemma 1, we conclude that the multi-agent systems (4) can achieve fixed-time bipartite formation, with the settling time as
Since the agent’s event detection occurs within the sampling period
Consider a system composed of seven agents, with the communication topology shown in Fig. 2, where solid lines represent cooperative relationships and dashed lines indicate competitive relationships. From Fig. 2, it is obtained that the second smallest eigenvalue of
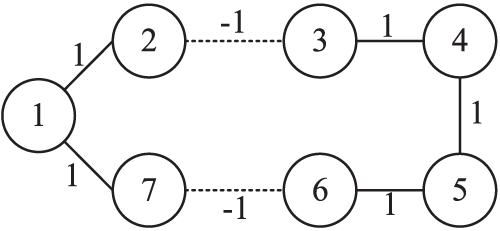
Figure 2: Communication topology of the controlled multi-agent systems.
When
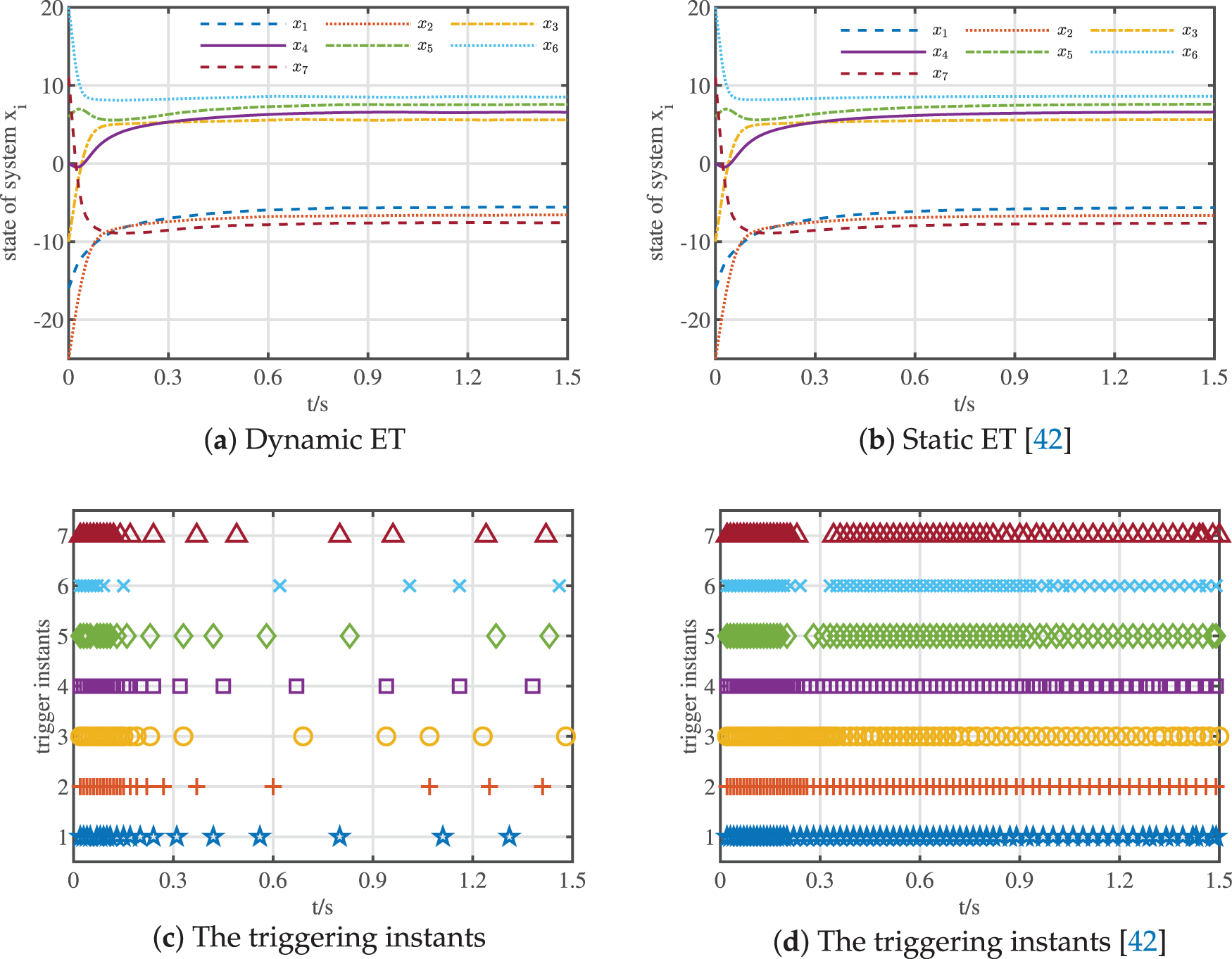
Figure 3: Fixed-time bipartite formation using different event-triggered mechanisms.
Furthermore, this paper conducts simulations with varying sampling periods, as shown in Fig. 4. The effectiveness is characterized by
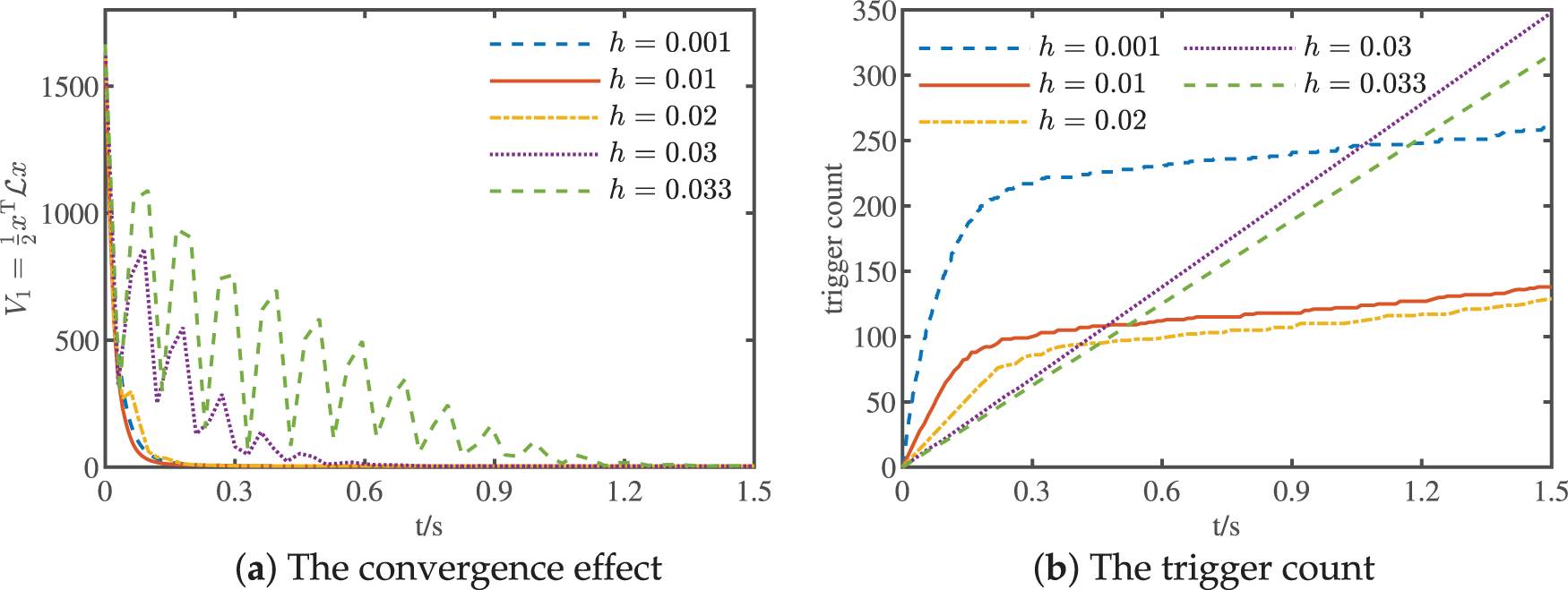
Figure 4: The impact of different sampling periods on the controlled multi-agent systems.
Finally, to verify the superiority of this algorithm, a comparative experiment with the existing method in [43] was conducted, and the results are shown in Fig. 5. Figs. 3a and 5a are the same. Fig. 5c changes the initial state to
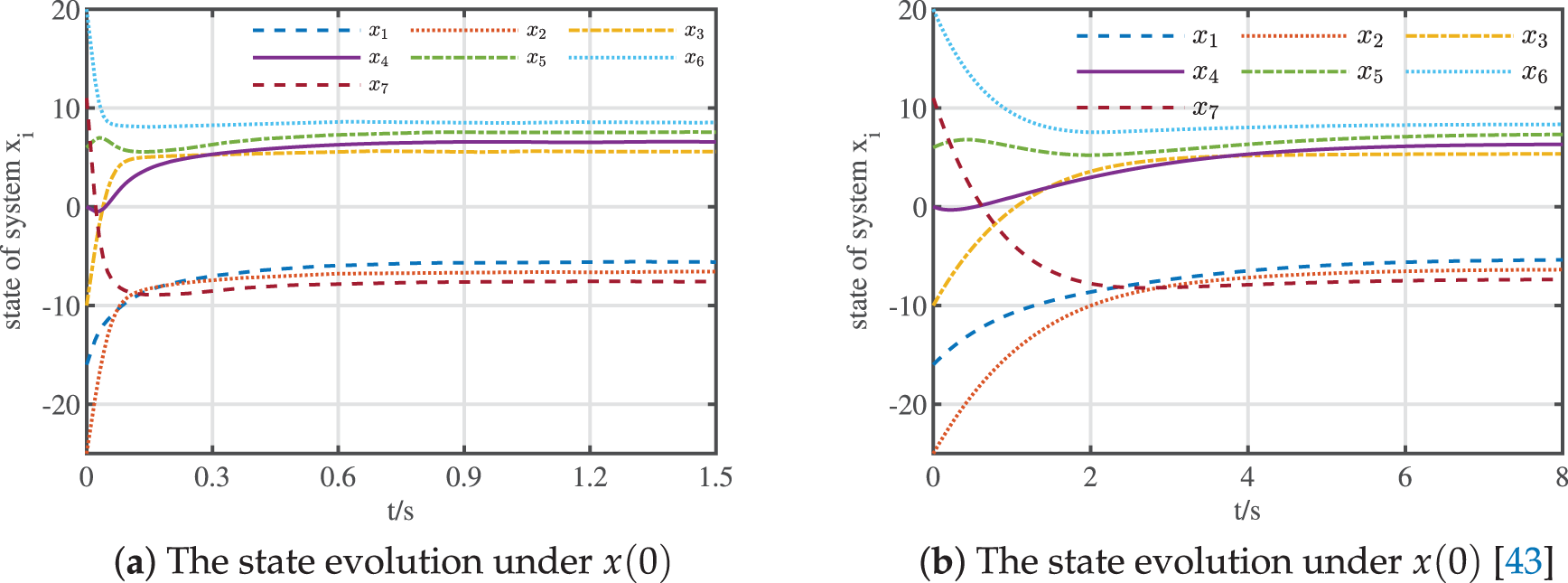
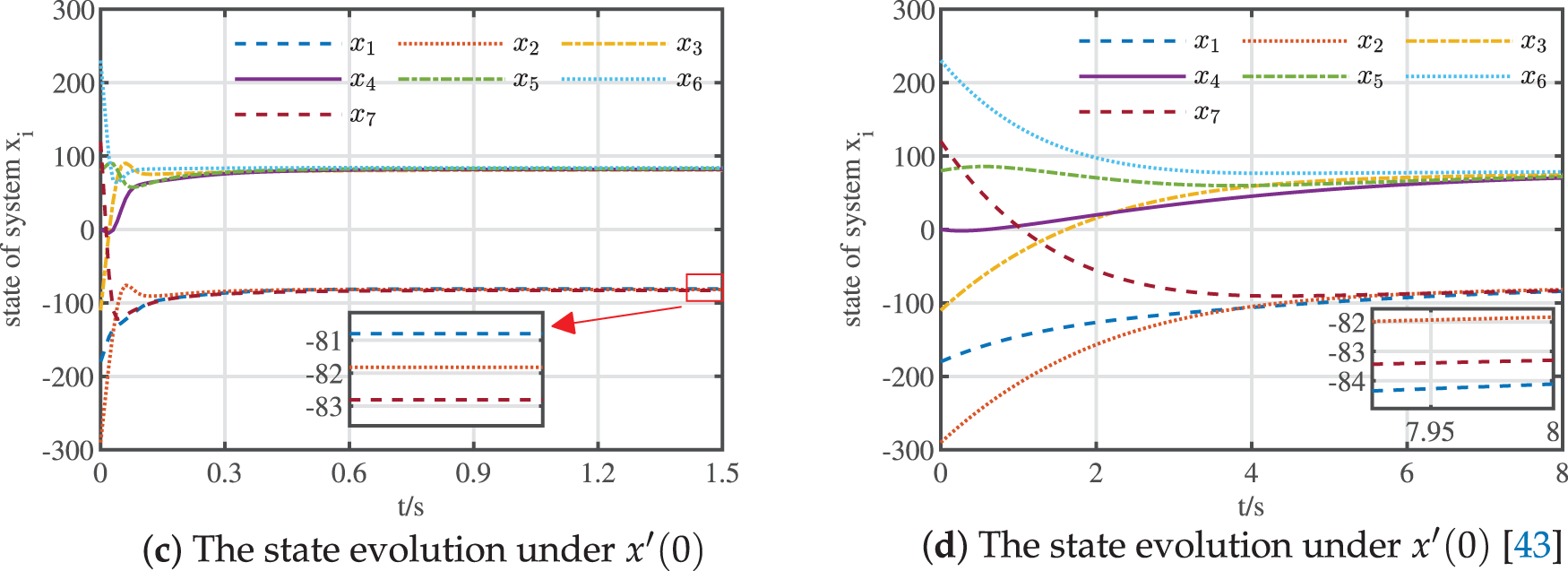
Figure 5: The results of different methods for the controlled multi-agent systems.
Consider a system composed of five unicycle-like nonholonomic robots [45]. The system’s communication topology is shown in Fig. 6a, and the schematic diagram of each unicycle-like nonholonomic robot is shown in Fig. 6b. The dynamic model of each robot is given as
where
where
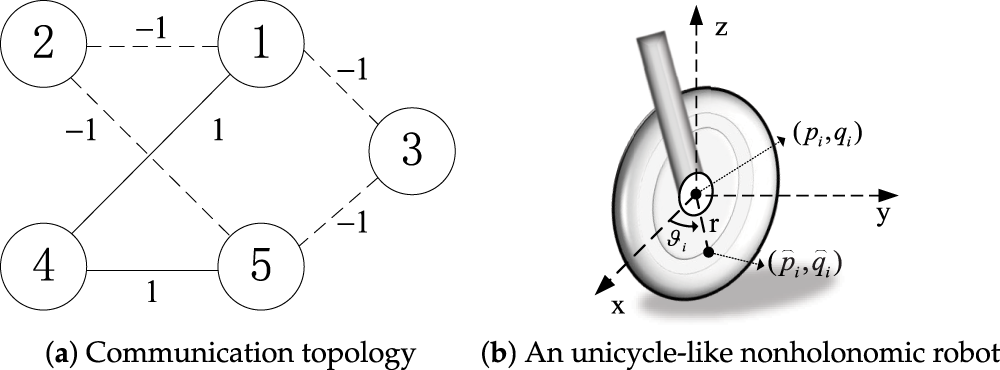
Figure 6: Unicycle-like nonholonomic robots.
From Eqs. (30) and (31), we have
where
The controller is analogous to Eq. (5).
where
The initial states of the system are
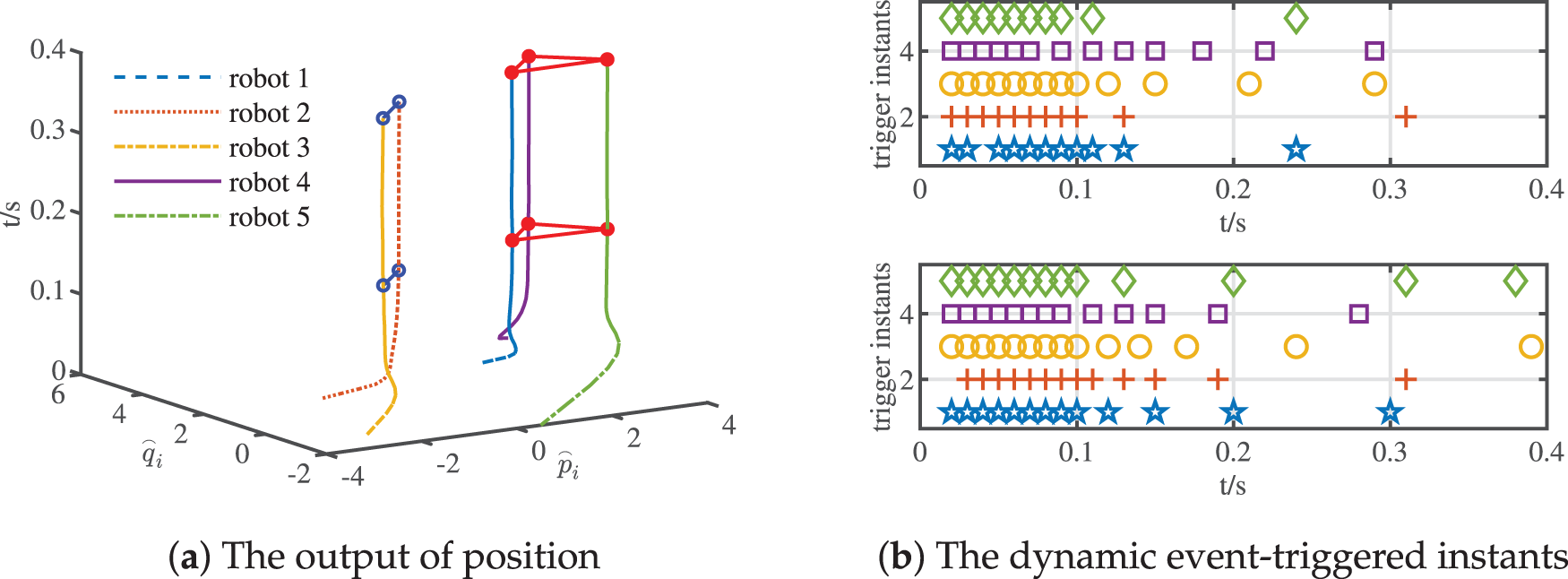
Figure 7: The output and event-triggered instants of the system.
This paper proposed a dynamic event-triggered fixed-time bipartite formation control algorithm for continuous-time multi-agent systems with sampled data. First, a periodic sampling mechanism and a dynamic event-triggered communication strategy have been developed. Compared with existing event-triggered methods, our method further reduces communication frequency and avoids the Zeno phenomenon by the designed sampling mechanism. Moreover, cooperative and competitive relationships among angels have been further considered, and a fixed-time bipartite formation control approach has been developed. In our future efforts, investigating fixed-time bipartite formation control multi-agent systems with non-periodic sampling and without requiring structural balance is meaningful.
Acknowledgement: We would like to express our sincere gratitude to the editors and reviewers for their constructive suggestions, which significantly enhanced the quality of this paper.
Funding Statement: This research was funded in part by the National Natural Science Foundation of China, grant number 62403216, in part by the Basic Research Program of Jiangsu Province, grant number BK20241608, in part by the Jiangsu Province Youth Science and Technology Talent Support Program, grant number JSTJ-2025-544, in part by the Wuxi Young Science and Technology Talent Support Program, grant number TJXD-2024-114, in part by the European Union Intelligent Multi-Agent Robotic Systems (EU iMARs) project, grant number HORIZON-MSCA-2023-101182996, and in part by the 111 project, grant number B23008.
Author Contributions: The authors confirm their contributions to this manuscript as follows: Conceptualization, Longquan Ma and Huarong Zhao; methodology, Linbo Xie and Hongnian Yu; software, Longquan Ma and Liqin Zhou; validation, Longquan Ma, Huarong Zhao, Liqin Zhou, Linbo Xie and Hongnian Yu; formal analysis and investigation, Longquan Ma and Liqin Zhou; resources, Longquan Ma, Huarong Zhao and Linbo Xie; writing—original draft preparation, Longquan Ma and Liqin Zhou; writing—review and editing, Huarong Zhao, Linbo Xie and Hongnian Yu; supervision and project administration, Huarong Zhao and Linbo Xie. All authors reviewed and approved the final version of the manuscript.
Availability of Data and Materials: All reviewed materials are publicly available and cited, primarily sourced from major academic repositories and publishers, including IEEE Xplore, ACM Digital Library, ScienceDirect (Elsevier), SpringerLink, AAAI, Nature, and the arXiv repository.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Zhu YM, Kang Z, Zhu HY, Wu S, Zhan X, Shen Q, et al. Robust attitude consensus control of multi-spacecraft with stochastic link failure. Aerosp Syst. 2023;6(4):581–94. doi:10.1007/s42401-023-00204-x. [Google Scholar] [CrossRef]
2. Xie X, Sheng T, Chen X. Self-triggered formation control for multi-spacecraft attitude coordination with communication delays. J Frankl Inst. 2023;360(18):14696–711. doi:10.1016/j.jfranklin.2023.11.021. [Google Scholar] [CrossRef]
3. Quan Y, Xi L. Smart generation system: a decentralized multi-agent control architecture based on improved consensus algorithm for generation command dispatch of sustainable energy systems. Appl Energy. 2024;365:123209. [Google Scholar]
4. Caicedo AMD, Mejia ÉF, Luna EG. Revolutionizing protection dynamics in microgrids: local validation environment and a novel global management control through multi-agent systems. Comput Electr Eng. 2024;120:109748. [Google Scholar]
5. Wang J, Luo X, Li M, Guan X. Distributed nonsingular terminal sliding mode control-based RBFNN for heterogeneous vehicular platoons with input saturation. Trans Inst Meas Control. 2024;46(9):1742–54. doi:10.1177/01423312231197848. [Google Scholar] [CrossRef]
6. Iizuka K, Seo T. Passenger-oriented distributed traffic signal control using dynamic programming with vehicle queue spillback and waiting time constraints. Int J Intell Transp Syst Res. 2024;22(3):579–602. doi:10.1007/s13177-024-00418-z. [Google Scholar] [CrossRef]
7. Mohamed H, Marouane H, Fakhfakh A. A systematic review of multi-agent systems and mobile edge computing in intelligent transportation systems. J Soft Comput Data Min. 2025;6(1):169–81. doi:10.30880/jscdm.2025.06.01.012. [Google Scholar] [CrossRef]
8. Farooq A, Xiang Z, Chang WJ, Aslam MS. Recent advancement in formation control of multi-agent systems: a review. Comput Mater Contin. 2025;83(3):1–52. doi:10.32604/cmc.2025.063665. [Google Scholar] [CrossRef]
9. Lin YH, Chang WJ, Lee YC, Aslam MS, Ku CC. Computational design of interval type-2 fuzzy control for formation and containment of multi-agent systems with collision avoidance capability. Comput Model Eng Sci. 2025;144(2):2231–62. doi:10.32604/cmes.2025.067464. [Google Scholar] [CrossRef]
10. Maldonado D, Cruz E, Torres JA, Cruz PJ. Benitez SdPG. Multi-agent systems: a survey about its components, framework and workflow. IEEE Access. 2024;12:80950–75. [Google Scholar]
11. Chen Y, Zhao H, Ogura M, Yu H, Peng L. Data-driven event-triggered fixed-time load frequency control for multi-area power systems with input delays. IEEE Trans Circuits Syst I Regul Pap. 2025;72(12):8492–504. doi:10.22541/au.172455533.39923476/v1. [Google Scholar] [CrossRef]
12. Zhao H, Shan J, Peng L, Yu H. Learning-based robust bipartite consensus control for a class of multiagent systems. IEEE Trans Ind Electron. 2022;70(4):4068–76. doi:10.1109/tie.2022.3174275. [Google Scholar] [CrossRef]
13. Bu X, Ma W, Yin Y. Event-triggered iterative learning formation control for a class of nonlinear multi-agent systems under deception attack. Asian J Control. 2025;277(11):110797. doi:10.1002/asjc.3675. [Google Scholar] [CrossRef]
14. Olfati-Saber R, Murray RM. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Autom Control. 2004;49(9):1520–33. doi:10.1109/tac.2004.834113. [Google Scholar] [CrossRef]
15. Li Z, Tang Y, Huang T, Wen S. Formation control of multiagent networks: cooperative and antagonistic interactions. IEEE Trans Syst Man Cybern Syst. 2021;52(5):2809–18. [Google Scholar]
16. Ma X, Chou T. Practical time-varying formation cooperative control for high-order nonlinear multi-agent systems avoiding spatial resource conflict via safety constraints. Int J Robust Nonlinear Control. 2024;34(18):11924–52. doi:10.1002/rnc.7600. [Google Scholar] [CrossRef]
17. Li T, Zhao R, Chen CP, Fang L, Liu C. Finite-time formation control of under-actuated ships using nonlinear sliding mode control. IEEE Trans Cybern. 2018;48(11):3243–53. doi:10.1109/TCYB.2018.2794968. [Google Scholar] [PubMed] [CrossRef]
18. Zhang J, Fu Y, Fu J. Adaptive finite-time optimal formation control for second-order nonlinear multiagent systems. IEEE Trans Syst Man Cybern Syst. 2023;53(10):6132–44. doi:10.1109/tsmc.2023.3278262. [Google Scholar] [CrossRef]
19. Zhang J, Tong S. Robust adaptive finite-time containment control for nonlinear multi-agent systems with unknown input saturations. Int J Control. 2024;97(6):1250–61. doi:10.1080/00207179.2023.2204381. [Google Scholar] [CrossRef]
20. Ning B, Han QL, Zuo Z, Ding L, Lu Q, Ge X. Fixed-time and prescribed-time consensus control of multiagent systems and its applications: a survey of recent trends and methodologies. IEEE Trans Ind Inform. 2022;19(2):1121–35. [Google Scholar]
21. Cheng W, Zhang K, Jiang B, Ding SX. Fixed-time fault-tolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances. IEEE Trans Circuits Syst I Regul Pap. 2021;68(5):2121–33. doi:10.1109/tcsi.2021.3061386. [Google Scholar] [CrossRef]
22. Zhang J, Fu Y, Fu J. Adaptive fixed-time output-feedback optimal time-varying formation control for multiple omnidirectional robot systems. IEEE Trans Fuzzy Syst. 2024;32(3):792–803. doi:10.1109/tfuzz.2023.3308573. [Google Scholar] [CrossRef]
23. Wang J, Li Y, Wu Y, Liu Z, Chen K, Chen CP. Fixed-time formation control for uncertain nonlinear multi-agent systems with time-varying actuator failures. IEEE Trans Fuzzy Syst. 2024;32(4):1965–77. doi:10.1109/tfuzz.2023.3342282. [Google Scholar] [CrossRef]
24. Zhang Y, Chadli M, Xiang Z. Prescribed-time formation control for a class of multiagent systems via fuzzy reinforcement learning. IEEE Trans Fuzzy Syst. 2023;31(12):4195–204. doi:10.1109/tfuzz.2023.3277480. [Google Scholar] [CrossRef]
25. Zhang Y, Chadli M, Xiang Z. Prescribed-time adaptive fuzzy optimal control for nonlinear systems. IEEE Trans Fuzzy Syst. 2024;32(4):2403–12. doi:10.1109/tfuzz.2024.3352590. [Google Scholar] [CrossRef]
26. Zhang Y, Xiang Z. Prescribed-time optimal control for a class of switched nonlinear systems. IEEE Trans Autom Sci Eng. 2024;22:3033–43. doi:10.1109/tase.2024.3388456. [Google Scholar] [CrossRef]
27. Altafini C. Consensus problems on networks with antagonistic interactions. IEEE Trans Autom Control. 2012;58(4):935–46. doi:10.1109/tac.2012.2224251. [Google Scholar] [CrossRef]
28. Wang W, Huang C, Huang C, Cao J, Lu J, Wang L. Bipartite formation problem of second-order nonlinear multi-agent systems with hybrid impulses. Applied Math Comput. 2020;370(11):124926. doi:10.1016/j.amc.2019.124926. [Google Scholar] [CrossRef]
29. Yang Y, Chen D, Liu Q, Yue D. Predictor-based bipartite time-varying formation control of nonlinear multi-agents systems via disturbance observer. Int J Robust Nonlinear Control. 2022;32(9):5694–716. doi:10.1002/rnc.6114. [Google Scholar] [CrossRef]
30. Ma L, Zhu F. Fixed-time-synchronizedbipartite time-varying formation tracking control of networked euler-lagrange systems. IEEE Trans Autom Sci Eng. 2025; 22:3458–69. doi:10.1109/TASE.2024.3395325. [Google Scholar] [CrossRef]
31. Dimarogonas DV, Frazzoli E, Johansson KH. Distributed event-triggered control for multi-agent systems. IEEE Trans Autom Control. 2011;57(5):1291–7. doi:10.1109/tac.2011.2174666. [Google Scholar] [CrossRef]
32. Zhao H, Shan J, Peng L, Yu H. Distributed event-triggered bipartite consensus for multiagent systems against injection attacks. IEEE Trans Ind Inform. 2022;19(4):5377–86. doi:10.1109/tii.2022.3157595. [Google Scholar] [CrossRef]
33. Zhao H, Yu H, Peng L. Event-triggered distributed data-driven iterative learning bipartite formation control for unknown nonlinear multiagent systems. IEEE Trans Neural Netw Learn Syst. 2022;35(1):417–27. doi:10.1109/TNNLS.2022.3174885. [Google Scholar] [PubMed] [CrossRef]
34. Cai Y, Zhang H, Zhang J, Xi R, He Q. Fully distributed bipartite time-varying formation control for uncertain linear multi-agent systems under event-triggered mechanism. Int J Robust Nonlinear Control. 2021;31(11):5165–87. doi:10.1002/rnc.5532. [Google Scholar] [CrossRef]
35. Liu J, Ran G, Wu Y, Xue L, Sun C. Dynamic event-triggered practical fixed-time consensus for nonlinear multiagent systems. IEEE Trans Circuits Syst II Express Briefs. 2021;69(4):2156–60. doi:10.1109/tcsii.2021.3128624. [Google Scholar] [CrossRef]
36. Du X, Qu S, Zhang H, Xu W, Tang Q. Distributed bipartite consensus for multi-agent systems with dynamic event-triggered mechanism. J Frankl Inst. 2023;360(12):8877–97. doi:10.1016/j.jfranklin.2022.05.022. [Google Scholar] [CrossRef]
37. Qi Y, Du C, Zhang X, Mu R. Dynamic event-triggered bipartite consensus for uncertain high-order nonlinear multi-agent systems. Control Theory Technol. 2023;21(2):222–32. doi:10.1007/s11768-022-00121-y. [Google Scholar] [CrossRef]
38. Yazdani S, Haeri M, Su H. Sampled-data leader-follower algorithm for flocking of multi-agent systems. IET Control Theory Appl. 2019;13(5):609–19. doi:10.1109/rios.2017.7956458. [Google Scholar] [CrossRef]
39. Liu W, Huang J. Leader-following consensus for linear multiagent systems via asynchronous sampled-data control. IEEE Trans Autom Control. 2019;65(7):3215–22. doi:10.1109/tac.2019.2948256. [Google Scholar] [CrossRef]
40. Liu H, Wang Z. Sampled-data-based consensus of multi-agent systems under asynchronous denial-of-service attacks. Nonlinear Anal Hybrid Syst. 2021;39(8):100969. doi:10.1016/j.nahs.2020.100969. [Google Scholar] [CrossRef]
41. Peng C, Zhang J, Han QL. Consensus of multiagent systems with nonlinear dynamics using an integrated sampled-data-based event-triggered communication scheme. IEEE Trans Syst Man Cybern Syst. 2018;49(3):589–99. doi:10.1109/tsmc.2018.2814572. [Google Scholar] [CrossRef]
42. Yao Y, Luo Y, Cao J. Finite-time guarantee-cost H∞ consensus control of second-order multi-agent systems based on sampled-data event-triggered mechanisms. Neural Netw. 2024;174(12):106261. doi:10.1016/j.neunet.2024.106261. [Google Scholar] [PubMed] [CrossRef]
43. Yin K, Yang D. Sampled-data-based dynamic event-triggered asynchronous control of continuous-time positive Markov jump systems. Chaos Solitons Fractals. 2023;169(9):113254. doi:10.1016/j.chaos.2023.113254. [Google Scholar] [CrossRef]
44. Parsegov S, Polyakov A, Shcherbakov P. Nonlinear fixed-time control protocol for uniform allocation of agents on a segment. In: Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC); 2012 Dec 10–13; Maui, HI, USA. p. 7732–7. [Google Scholar]
45. Chen X, Yu H, Hao F. Prescribed-time event-triggered bipartite consensus of multiagent systems. IEEE Trans Cybern. 2020;52(4):2589–98. doi:10.1109/TCYB.2020.3004572. [Google Scholar] [PubMed] [CrossRef]
Cite This Article
 Copyright © 2026 The Author(s). Published by Tech Science Press.
Copyright © 2026 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools