
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW

A Comprehensive Review of Next-Gen UAV Swarm Robotics: Optimisation Techniques and Control Strategies for Dynamic Environments
1 Interdisciplinary Research Centre for Aviation and Space Exploration (IRC-ASE), King Fahd University of Petroleum and Minerals (KFUPM), Dhahran, 31261, Saudi Arabia
2 Aerospace Engineering Department, King Fahd University of Petroleum and Minerals (KFUPM), Dhahran, 31261, Saudi Arabia
3 Department of Electrical Electronics and Computer Engineering, University of Catania, Piazza Università, Catania, 95124, Italy
4 Department of Electrical Engineering, Quaid-e-Awam University of Engineering Sciences and Technology (QUEST), Nawabshah, 67480, Pakistan
* Corresponding Author: Ghulam E Mustafa Abro. Email:
Intelligent Automation & Soft Computing 2025, 40, 99-123. https://doi.org/10.32604/iasc.2025.060364
Received 30 October 2024; Accepted 11 December 2024; Issue published 23 January 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This review synthesises and assesses the most recent developments in Unmanned Aerial Vehicles (UAVs) and swarm robotics, with a specific emphasis on optimisation strategies, path planning, and formation control. The study identifies key methodologies that are driving progress in the field by conducting a comprehensive analysis of seven critical publications. The following are included: sensor-based platforms that facilitate effective obstacle avoidance, cluster-based hierarchical path planning for efficient navigation, and adaptive hybrid controllers for dynamic environments. The review emphasises the substantial contribution of optimisation techniques, including Max-Min Ant Colony Optimisation (MMACO), to the improvement of convergence rates and the enhancement of path efficiency. The effectiveness of various navigation systems in diverse operational contexts is demonstrated through comparative analysis, which provides valuable insights into the system’s adaptability and performance. The primary findings underscore the strengths and limitations of current methodologies, thereby identifying voids in research and practical applications. This review offers actionable insights for academicians and practitioners who are striving to advance UAV and swarm robotics technology by addressing these challenges. The study concludes with a discussion of future directions, which underscores the potential for innovative solutions to enhance UAV systems in complex, dynamic environments.Keywords
Swarm robots and Unmanned Aerial Vehicles (UAVs) are essential technologies in contemporary autonomous systems, providing novel solutions for intricate tasks including surveillance, disaster response, and environmental monitoring [1]. The progression of these technologies is primarily propelled by continuous research in optimisation techniques, path planning, and formation control, facilitating more efficient and intelligent coordination among many UAVs. This thorough study examines recent advancements in these fields, providing a detailed assessment of innovative methods such as adaptive hybrid controllers, hierarchical path planning models, and sensor-based obstacle avoidance systems [2]. This work conducts a comparative examination of seven seminal articles on advanced methodology in swarm robotics, highlighting the efficacy of Max-Min Ant Colony Optimisation (MMACO) and other optimisation strategies in enhancing path efficiency and convergence rates. The analysis delineates critical problems and research deficiencies that must be addressed to foster further innovation in the sector, rendering it an indispensable reference for academics and practitioners seeking to augment the capabilities of UAV systems in dynamic and complex contexts. Particularly, the reader will be able to read the main motivation behind this research work, background related to UAV Swarm robotics and will be able to understand the Significance of Formation Control, Path Planning, and Optimization within this section.
Recent advancements in robotics research encompass multi-UAV formation control and swarm robotics, which draw considerable inspiration from the collective behaviours observed in natural systems such as fish schools, insect colonies, and bird flocks as shown in Fig. 1. Swarm robotics denotes decentralised networks of economical, uncomplicated robots that demonstrate exceptional fault tolerance, scalability, and adaptability. Consequently, these technologies are especially appropriate for application in unforeseen and dynamic settings. The formation of unmanned aerial vehicles (UAV), commonly known as drones has been an emerging topic in today’s era. This is due to its remarkable advantages, including enhanced durability, adaptability to various environments, and flexibility [1,2]. The fundamental objective of this study is to improve the understanding and efficacy of multi-UAV formations and swarm robotic systems, concentrating on formation control and path planning optimisation. Path planning significantly influences the results of navigation tasks, making it essential for optimising the collective efficacy of swarm systems. Many strategies have been suggested to fine tune this attribute, but it remains a real challenge to identify simple and resource light methods. While many attempts have been made to improve the process, finding a best way open issue given variables are dynamic from client-to-client and project needs change over time making everything together an intricate structure of complexity. Continuous monitoring is necessary to realise the optimisation results you want.
Figure 1: Biological swarm system with full cooperative behaviour
1.2 Overview of UAV Swarm Robotics
Unmanned Aerial Vehicles (UAVs) were born out of military applications, which has become a new trend in other sectors—both defense and nondefense arms like construction, mapping as well and search and rescue. The ability to position UAVs in such formations—such as squares or triangles—is crucial for these applications because even more precise control strategies are needed to maintain operational effectiveness and stability. This is one of the most significant aspects that today researchers are much more interested in behaviour-based, leader-follower-based, and virtual leader-based formations [3,4], Nevertheless, exercising these strategies is not free of difficulty. The leader-follower approach is limited by imperfections in the feedback and control systems [5]; on the other hand, a virtual formation scheme could have its performance degraded due to the loss of one UAV from the group as demonstrated in [4–6]. The relationship with new vehicles has been explored in Fig. 2. Path planning is a major issue for enhancing the overall performance of swarm robotics, where multiple robots have to cooperate to realize a complex task. Due to the nature of decentralized systems, scalability and reliability in path-planning techniques have become very important to guarantee that the aggregate behavior of the swarm yields the expected results. Swarm systems have particular advantages in dynamic context applications wherein conventional control systems of centralized nature may fail due to their inherent adaptability and fault tolerance capability [5,6]. In Fig. 2, it is tried to illustrate the unmanned ground vehicles (UGVs) and unmanned aerial vehicle (UAVs) based swarm.
Figure 2: Illustration of swarm autonomous ground and aerial systems
1.3 Significance of Formation Control, Path Planning, and Optimization
Formation control is vital in UAV operations, enabling the accomplishment of organized and effective life missions. These range from the management of a satellite array to reconnaissance missions. The formation control will be able to allow multiple UAVs to fly in synchronization to perform complex maneuvers that individual units could not perform. The ability of flight vehicles to hold formations enhances efficiency in accomplishing UAV missions. This means that many flight units can carry out operations such as surveillance and search-and-rescue, where precision and coordination are crucial [7,8]. The performance of such formations is based on an effective route design process that enhances path navigation to identified targets by taking into consideration environmental conditions and obstacles. In swarm robots, path planning cannot be imagined without optimization methods for enhancing efficiency and effectiveness. To enhance such processes, several optimization algorithms have been developed; among them, bio-inspired ones, like the Ant Colony Optimization (ACO), are increasingly represented. Ant Colony Optimisation and its variants, like the Max-Min Ant Colony Optimisation, have shown much promise in improving convergence rates and escaping from local optima, common issues in dynamic contexts [9]. This study integrates algorithms into swarm and UAV systems, advancing the field and providing insights into best practices for improving robotic system performance in complicated, real-world applications. The results of this research are anticipated to influence future advancements, directing the development of more versatile and resilient UAV systems. This review article is organised into eight sections. Section one presents the history and rationale for this study issue, along with an overview of swarm robotics, specifically concerning unmanned aerial vehicles (UAVs). Furthermore, it emphasises the importance of formation control, path planning, and optimisation study. Section 2 addresses Multi-UAV swarm methodologies and their associated techniques, as well as the primary restrictions. Section 3 presents the cluster-based hierarchical and multi-colony path planning swarm methodologies. The examination of optimisation strategies can be found in Section 4. Additionally, the design of the sensor platform and the corresponding case study are included in Section 5. Section 6 presents a comparison analysis of the fastest path neighbour method and the nearest neighbour strategy. Comprehensive findings and significant insights are presented in Section 7, while Section 8 contains the conclusion, future directions, and the primary promise of this field. Fig. 3 provides a reference for content that a reader may be able to read in this research review publication.
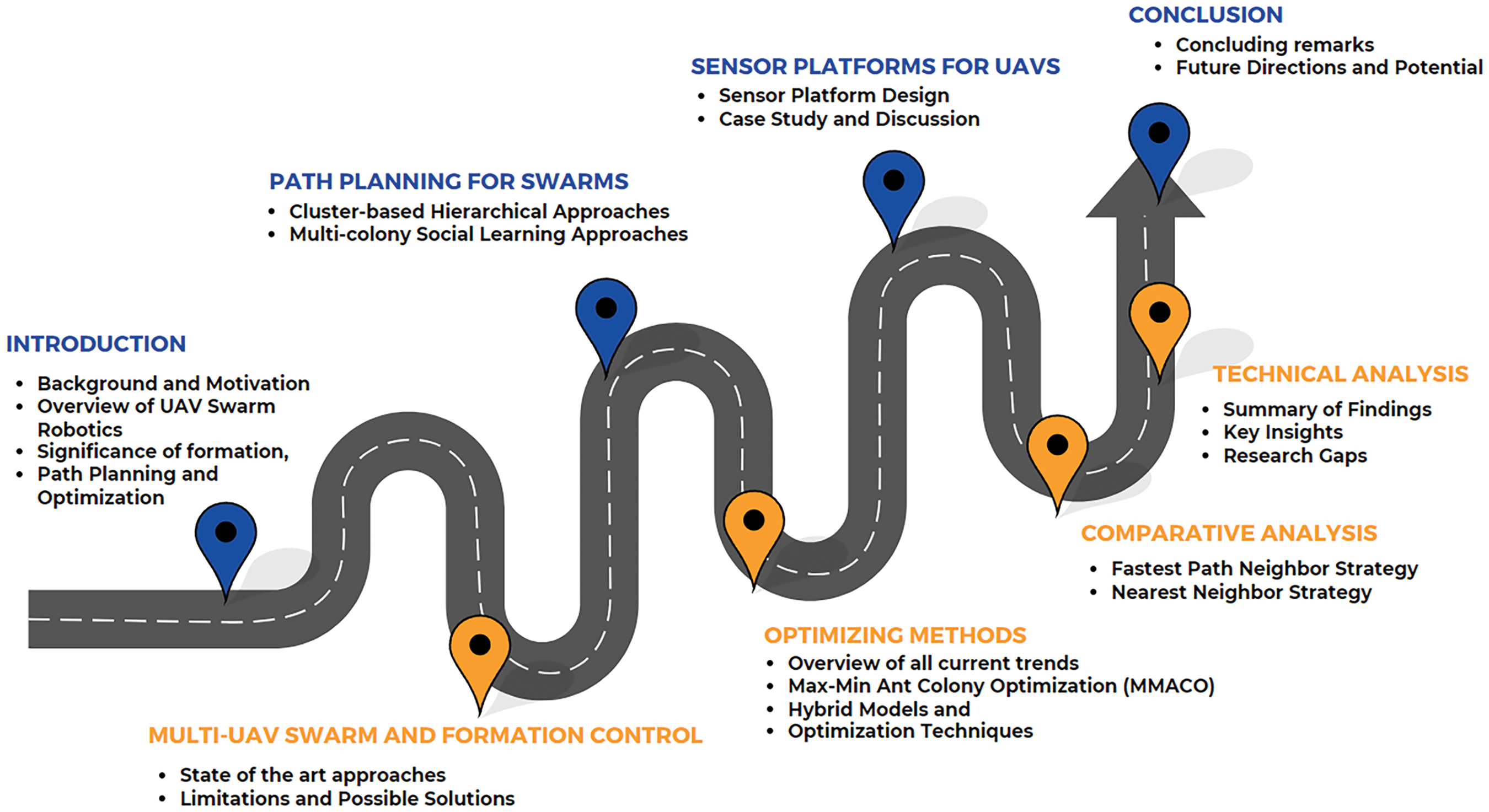
Figure 3: Structure of the proposed review manuscript
Control of multi-UAV formations has recently emerged as a significant challenge within the broader field of UAV research. It has been noticed that employing numerous drones in a designated formation for a certain activity or mission enhances outcome efficiency. Formation control refers to the arrangement of a group of UAVs maintaining a designated configuration, such as a triangle or square. Potential applications of formation control include diverse collective purposes such as search and rescue, reconnaissance, transportation of large items, and management of satellite constellations [1–3]. One may find several formation and swarm configurations in the literature [4–6]. Each unique approach has its advantages and disadvantages. One aircraft functions as the leader, while the remaining aircraft trail behind it. For instance, we implement the leader-follower approach. Overall this technique is robust except for one disadvantage [7] which is the unavailability of immediate feedback between the followers and the main leader. In some of the research contributions such as in [8], one may witness the strategy that is applicable if and only if the distance between followers and leader is known whereas some of the techniques are independent of the dynamic model [9,10]. In addition to this, if someone is implementing the virtual leader formation and swarm, one of the drones will be considered as the leader for all [11]. This will help in examining robustness along with the vision-based approach for the fleet of drones. While reading a lot of research contributions- one may find cohesive techniques [12] where they have integrated the leader-follower method along with the virtual leader technique and behavioral approach. The finite-time consensus algorithm for multiple drones can be studied in [13] along with the detailed investigation related to the formation maintenance with rudimentary data [14]. Another important aspect on which one must not compromise is the communication delays during the maneuvering of multiple drones in a swarm [15]. In most of these research contributions related to formation and swarm, researchers have utilized the mathematics of Lyapunov-Krasovskii to overcome the delays and their effects.
Numerous studies exist on motion control; nonetheless, it remains deficient and necessitates additional examination and management. There is a necessity to address scattered levels and their impacts appropriately [16]. Likewise, machine learning and reinforcement learning necessitate an extended duration for the online learning phase and substantial data sets for offline training. Consequently, the incorporation of artificial intelligence (AI) methodologies into control protocols is imperative. A further problem in motion control protocol is its robustness, which is significantly affected by external disturbances [17]. Formation control seeks to produce control signals that direct UAVs to assume a designated configuration. The architecture of motion control, along with the tactics designed for its acquisition, is of significant relevance [18]. The motion controls of UAVs necessitate an information exchange within their team; hence, they employ communication structures. A single UAV may lack comprehensive global information for an entire mission. Centralised architecture is hardly utilised due to its limited computational and communicative capabilities. Decentralised architecture is favored for multi-UAV systems and employs consensus algorithms for its design. It relies on local interactions with neighbours while preserving a degree of remoteness. This discussion addresses several advanced control methodologies that assist researchers, highlighting their respective advantages and disadvantages as mentioned below:
• Leader-Follower Strategy: This strategy designates one UAV as the leader, with the remaining UAVs functioning as followers within a group. The mission details are retained solely by the leader, while the following pursue their leader within predetermined areas. The primary advantage of this technique is its straightforward and uncomplicated implementation. This technique is susceptible to single-point failures due to reliance on leadership. This constraint can be mitigated by designating many leaders and virtual leaders.
• Strategy Based on Behaviour: This method generates control signals that take into account many mission essentials by incorporating numerous vector functions. Its primary advantage is its exceptional adaptability to unfamiliar environments. The disadvantage lies in the necessity for mathematical modelling, which complicates the analysis of system stabilities.
• Virtual Structure Strategy: This method entails a fixed configuration for the intended formation of the UAVs. To attain the intended configuration, it is necessary to direct each UAV toward its virtual node. The capacity to sustain formation and ensure fault tolerance are its most significant advantages. This method encounters failure when UAV detection within the formation is erroneous. The remuneration for this defective UAV necessitates a rearrangement of the formation geometry. This method necessitates a robust computational capacity, which is a drawback of this strategy.
2.1 State-of-the-Art-Approaches
This subsection provides insights into the trending algorithms to overcome the effects that occurred due to time delays. For instance, in [19], one may find the high-order adaptive control approach for drones to tackle the uncertainties and external noise. This high-order adaptive algorithm amalgamates two different control approaches such as sliding mode control with a neural network approach. Furthermore, in the literature review, one may study [20,21] to learn how collisions have been prevented using deep reinforcement learning (DRL) algorithms. To address similar limitations researchers have proposed Artstein’s reduction mathematical approach. This approach also resolves the delayed in interaction among the agents. A similar study apart from aerial vehicles, has been implemented for unmanned under-water Vehicles (UUWV) in [22] where they proposed a gradient descent method to mitigate the delay issues. Researchers investigated the distributed control approaches also for the same purpose [23].
The researchers divided the model into linear and nonlinear loops for better control. Back-stepping was used to control a UAV swarm along a circular path in another study [24]. The designed method adapts to parameters and input limits. The researchers also study event-triggered formation control. A study [25] creates an event-triggered predictive model for UAV management. In the suggested paradigm, UAVs can only share information with neighbouring units, and event trigger phenomena reduce algorithm computational load. Reference [26] uses a hybrid method to control UAV swarms by improving fitness. PSO with Cauchy mutant (CM) operators was used. The operators improve the PSO algorithm by assessing global UAV formation solutions’ fitness. The method improves convergence and speed. Multichotomy hierarchies are built in [27]. Each of the three non-overlapping colonies has many UAVs and a leader. To create a UAV colony with a Vicsek-based multiagent system, the author devised Maximum-Minimum Ant Colony Optimisation (MMACO). The MMACO chooses the best ant, the MAS chooses the colony leader, and the UAVs act as agents. Additionally, colony leaders must collaborate to achieve a common goal. UAV formation in the leader-follower paradigm has two main configurations: follower and diamond [28,29]. The two formation configurations are schematically shown in Fig. 4. Many complex structures develop from these two standard layouts.
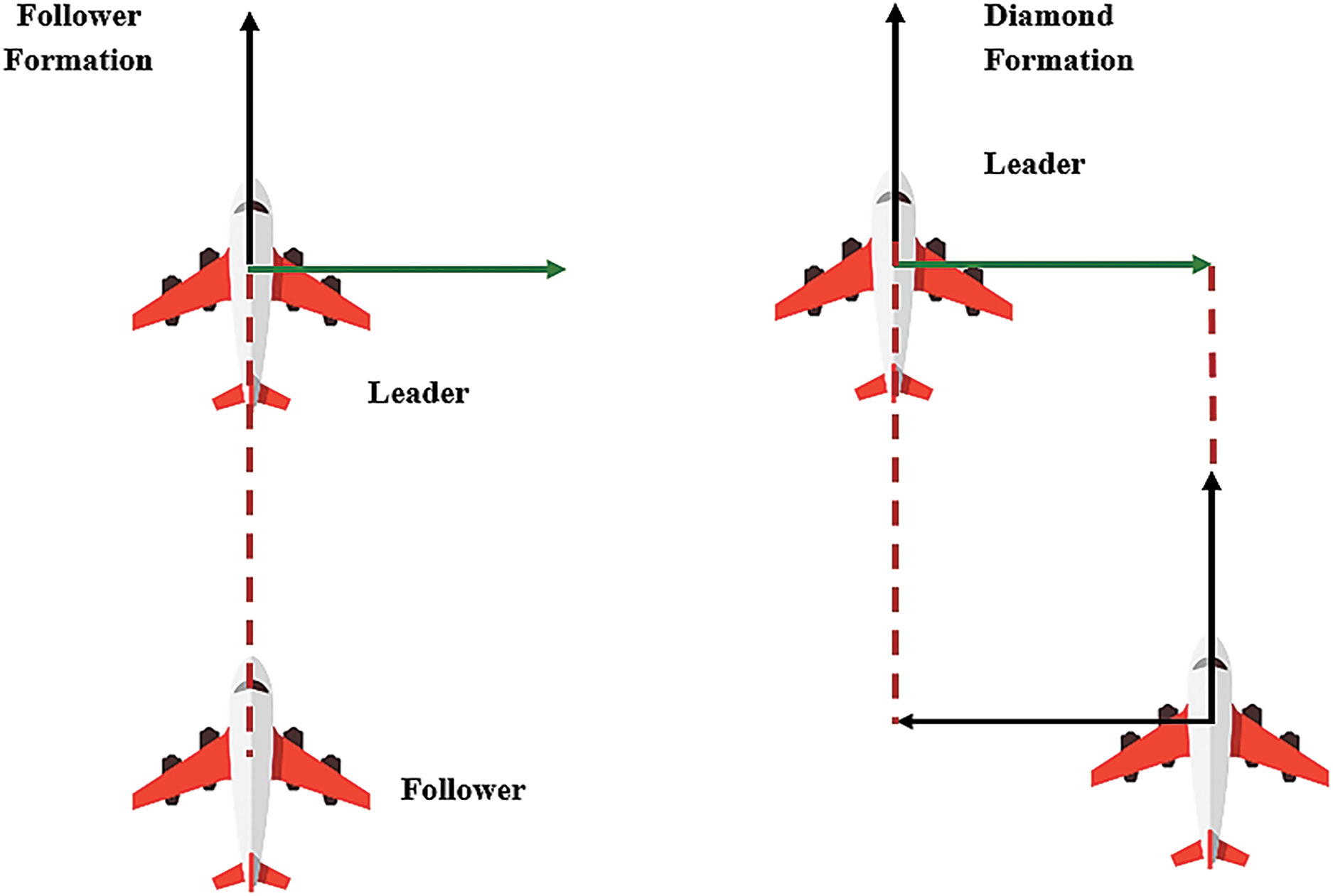
Figure 4: Typical configuration of UAV formations
Both formation configurations have pros and cons [30]. The follower formation’s small land area reduces its vulnerability to reconnaissance units and hostile ground radar but significantly reduces intelligence gathering. The diamond formation can cover a substantial area to guarantee optimal visibility for each team member; it may also enhance the likelihood of detection by the enemy [30]. The two fundamental configurations of formation are diamond and follower formations, from which several popular UAV formations, such as the “plus” shape and “arrow” shape, can be derived. The prevalent formation structures are seen in Fig. 5. The configuration of drones significantly impacts the overall performance of the formation. To improve efficiency, minimize energy loss, and mitigate risks, novel formation designs are garnering increasing interest [31], as seen in Fig. 6.
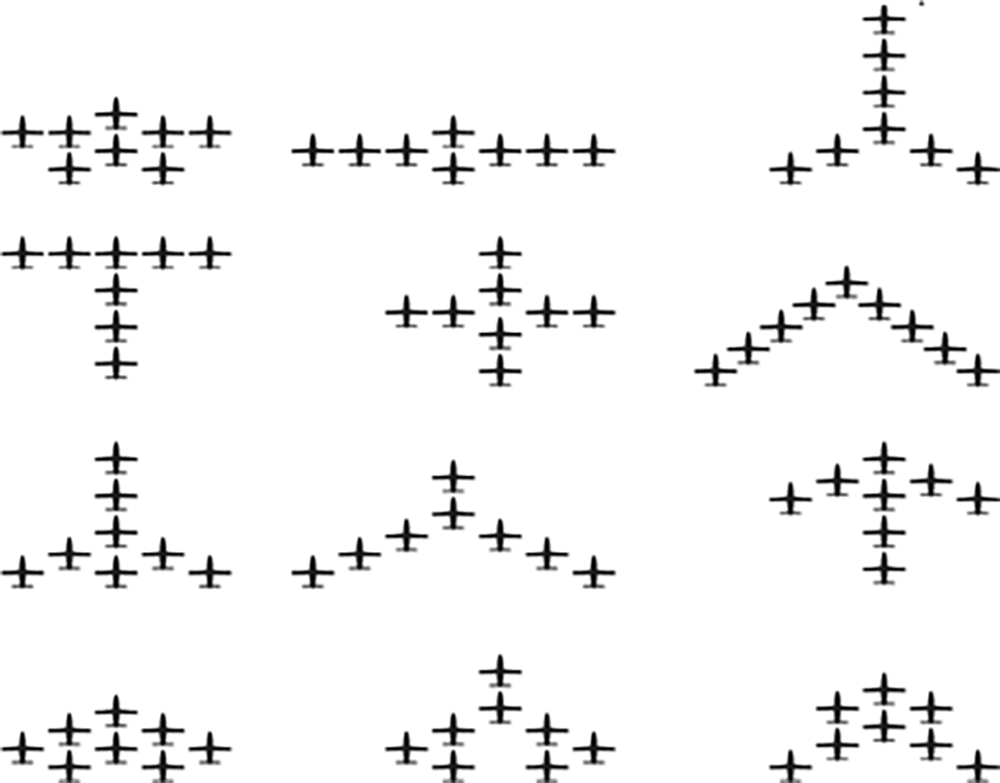
Figure 5: Different configurations of UAV formations [2]
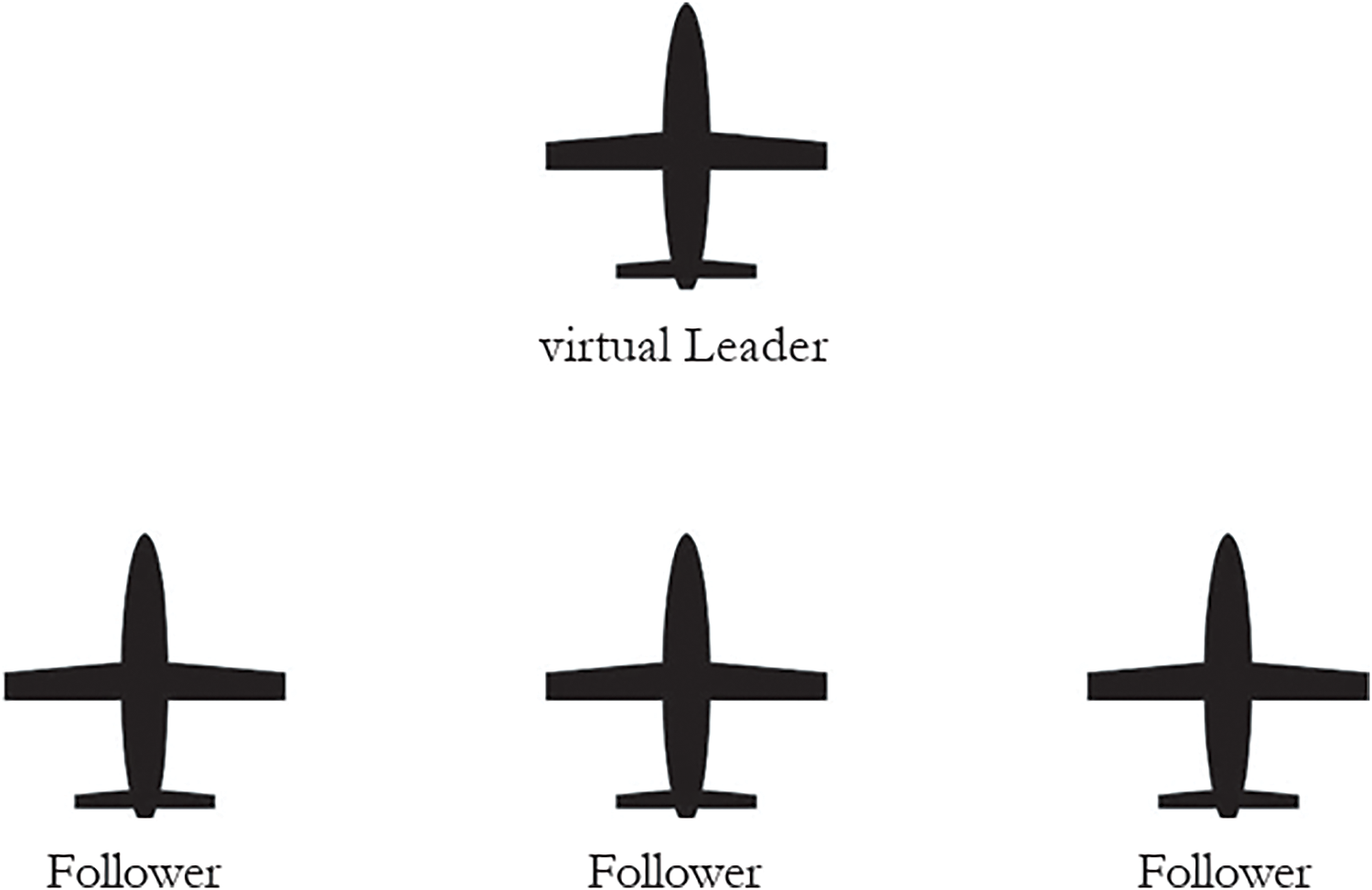
Figure 6: Leader formation (Virtual topology) [2]
The virtual leader formation structure reduces communication latency and onboard processor load [32]. Thus, more formation members may be added. All members share information to maintain formation configuration during several UAV formation flights. Input lag is inevitable when members share information [33,34]. This situation greatly influences system stability, thus it is relevant for analysing the consistency issue of the UAV formation system with time delays [35,36]. The communication topology between a leader UAV and its following UAVs is essential for sustaining coordinated behaviour and guaranteeing effective task execution in formation control. The leader-follower paradigm often depends on a directed communication graph in which the leader UAV conveys its position, velocity, and trajectory to its followers. The followers modify their states according to the information obtained from the leader while simultaneously communicating with adjacent UAVs to maintain formation. This architecture can be organised as centralised, decentralised, or dispersed, contingent upon the extent of inter-UAV communication, with each method providing differing levels of robustness, scalability, and fault tolerance in dynamic contexts. This is depicted in Fig. 7.
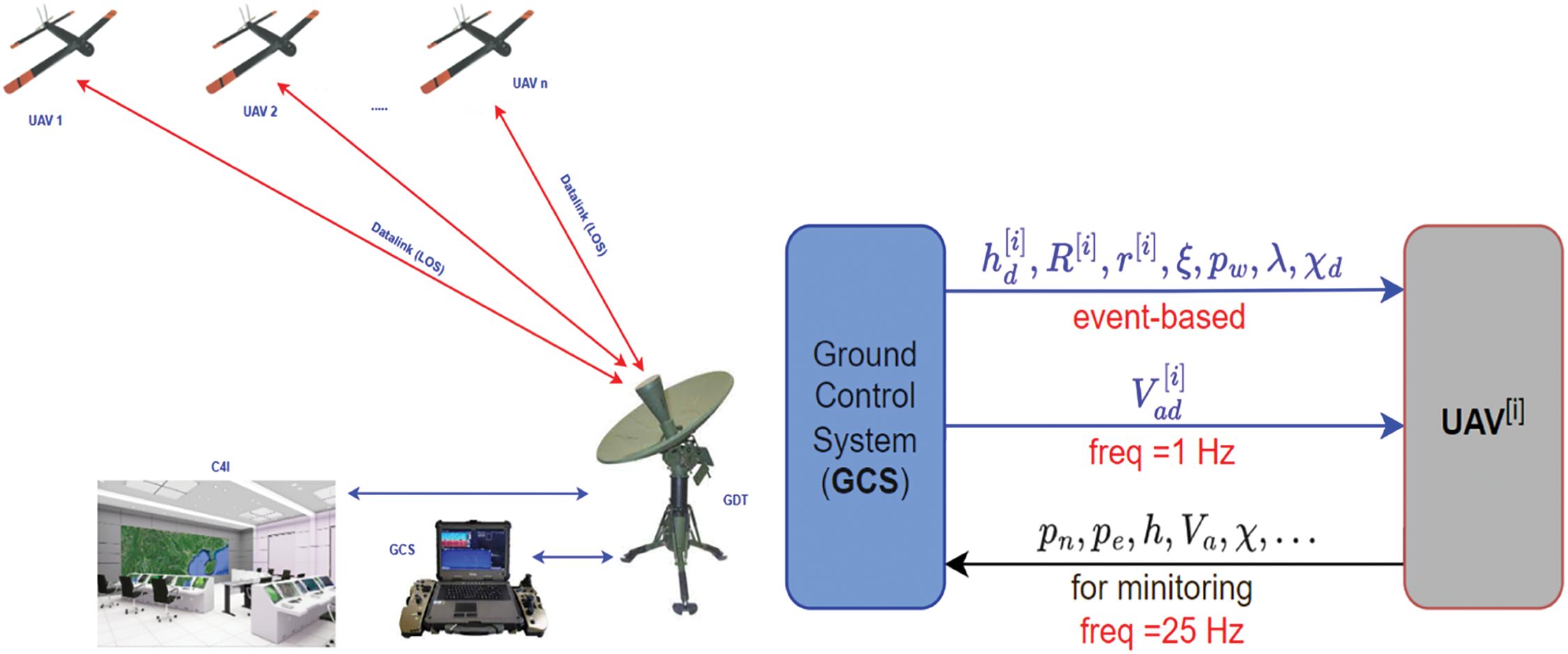
Figure 7: Interaction among ground control station (GCS) and UAVs and exchange of information and vice versa [36]
Path planning is one of the most critical issues in swarm robotics, where several unmanned aerial vehicles share common tasks. In that respect, effective path planning plays a significant role in swarm robotics since the same directly impacts mission performance, energy usage, and efficiency. In swarm robotics, a major challenge is to devise paths in such a way as to increase the effectiveness of single UAVs while keeping interaction smooth among swarm members. This requires overcoming various restrictions imposed by real-time responsiveness, adaptability to changing environmental conditions, and collision avoidance [37]. Swarm robotics is an emergent area of distributed robotics that takes inspiration from schools of fish and flocks of birds, or other colonies of social insects. The decentralization of control in swarm robotics provides two important features: robustness and scalability [38]. It also raises new challenges, especially on the path planning side since the adaptiveness of the swarm to online modifications in conditions should be balanced with the quest for optimality. This is challenging, and effective swarm path planning needs the integration of several technologies and algorithms [39].
3.1 Cluster-Based Hierarchical Approaches
The implementation of hierarchical cluster-based approaches is a potential approach for path planning in swarm robotics. These strategies integrate Multi-Agent Systems (MAS) with Ant Colony Optimisation (ACO) to leverage the advantages of hybrid algorithms [40]. Ant Colony Optimization, inspired by the foraging behavior of ants, identifies the optimal pathways in complex environments, while Multi-Agent Systems enable communication and coordination among Unmanned Aerial Vehicles. The hierarchical approach holds each cluster to be managed by a leader UAV, although this approach segregates the swarm into clusters. In this scenario, ACO is used by the leader UAV to find an optimal path while considering the local paths of its cluster. While MAS enables communication between clusters, itself works at a higher level to maintain efficiency and coordination regarding the swarm’s collective activities. Such a hybrid approach is suitable for large-scale swarm activity since it supports scalability and further enhances the capability of the path-planning procedure.
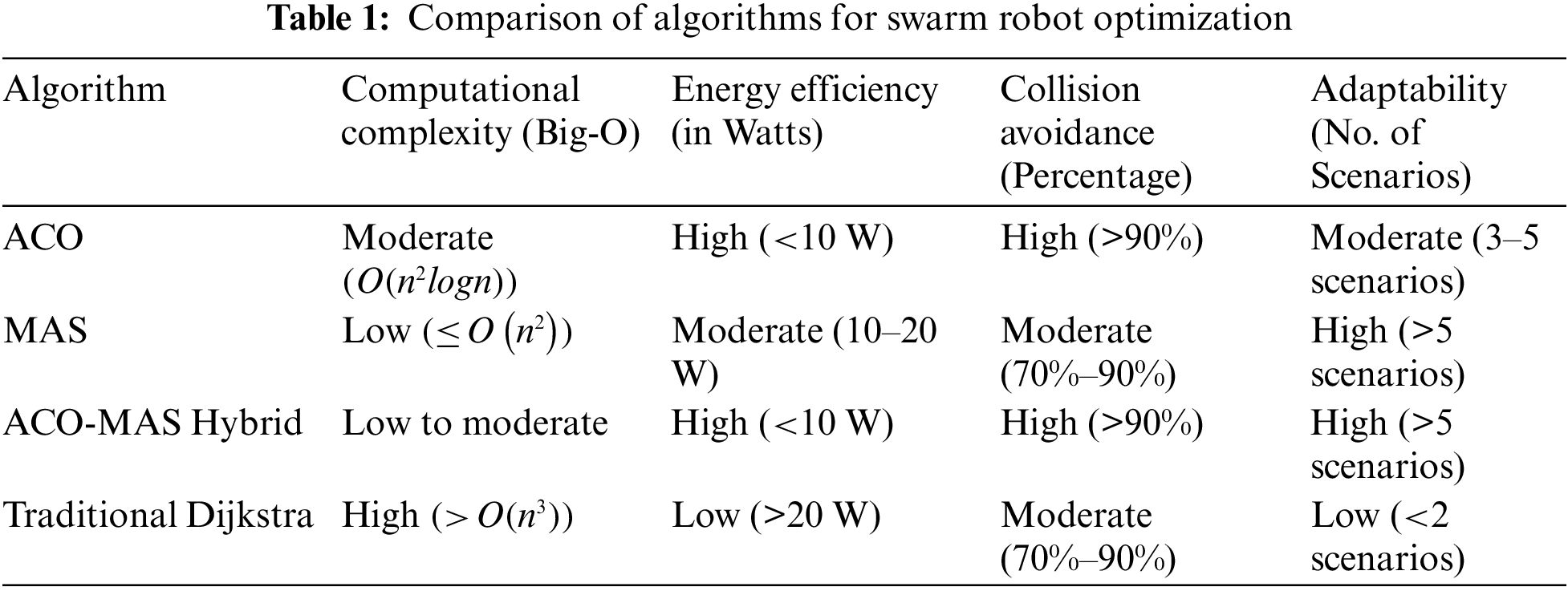
Table 1 in this study compares several path-planning algorithms, including hybrid variants like the one described herein, against conventional algorithms. The parameters considered in the performance evaluation include computational complexity, energy economy, collision avoidance, and adaptation to the environment. The hybrid ACO-MAS performed better in all these metrics, but with increased performance in huge swarms and complicated environments.
3.2 Multi-Colony Social Learning Approaches
Other more sophisticated tools applied in swarm path planning involve the implementation of multi-colony social learning systems. Embracing self-organization and dynamic selection of leaders within the swarm, out of such tactics, comes a further ability to be adaptable to changes in environmental conditions. With this scheme, the swarm is divided into several colonies ruled by a different leader [41–43]. These leaders are not previously chosen. Instead, they are dynamically chosen according to performance criteria: remaining energy, completed jobs, and distance with respect to barriers. Social learning is one of the more important methods since it allows UAVs to share all their knowledge and experiences with each other and generally improve their decisions later on [44–46]. For example, if one of the colony leaders finds an optimal path, then the finding benefits the whole swarm because the other colonies learn from it. Therefore, if this approach is applied, then definitely, in case of any new obstacles or hindrances, the swarm will rapidly react to those. In that way, the process of path planning will be more effective [47].
This is a difficult but significant undertaking: the optimization of the flight route of UAVs demands advanced algorithms and an organized framework. Therefore, it describes one of the most relevant undertakings in this field. Cluster-based hierarchical and multi-colony social learning methods allow researchers and engineers to design swarm systems that are durable and successful. It works well under unstable or dynamic situations. If these technologies continue to be refined, the future of swarm robots will potentially shine very brightly, especially in tasks requiring large-scale and coordinated activities in difficult environments.
Optimisation techniques, of course, are very important in the planning of the paths of UAVs. In this case, energy expenditure is minimized, the probability of mission success will increase, and it enables the UAV to negotiate complex and dynamic environments [48]. During the last years, unmanned aerial vehicles, or UAVs have been finding a wide range of applications, starting from military operations to agricultural, emergency, and environmental applications [49]. In all application domains, increased flight performance is still needed, calling for an efficient and effective path-planning algorithm in view of that. Path planning entails establishing the most efficient route a UAV would take from a given starting point to its destination with consideration of several factors such as obstacles, topography, energy consumption, and the time it takes for the flight [50,51].
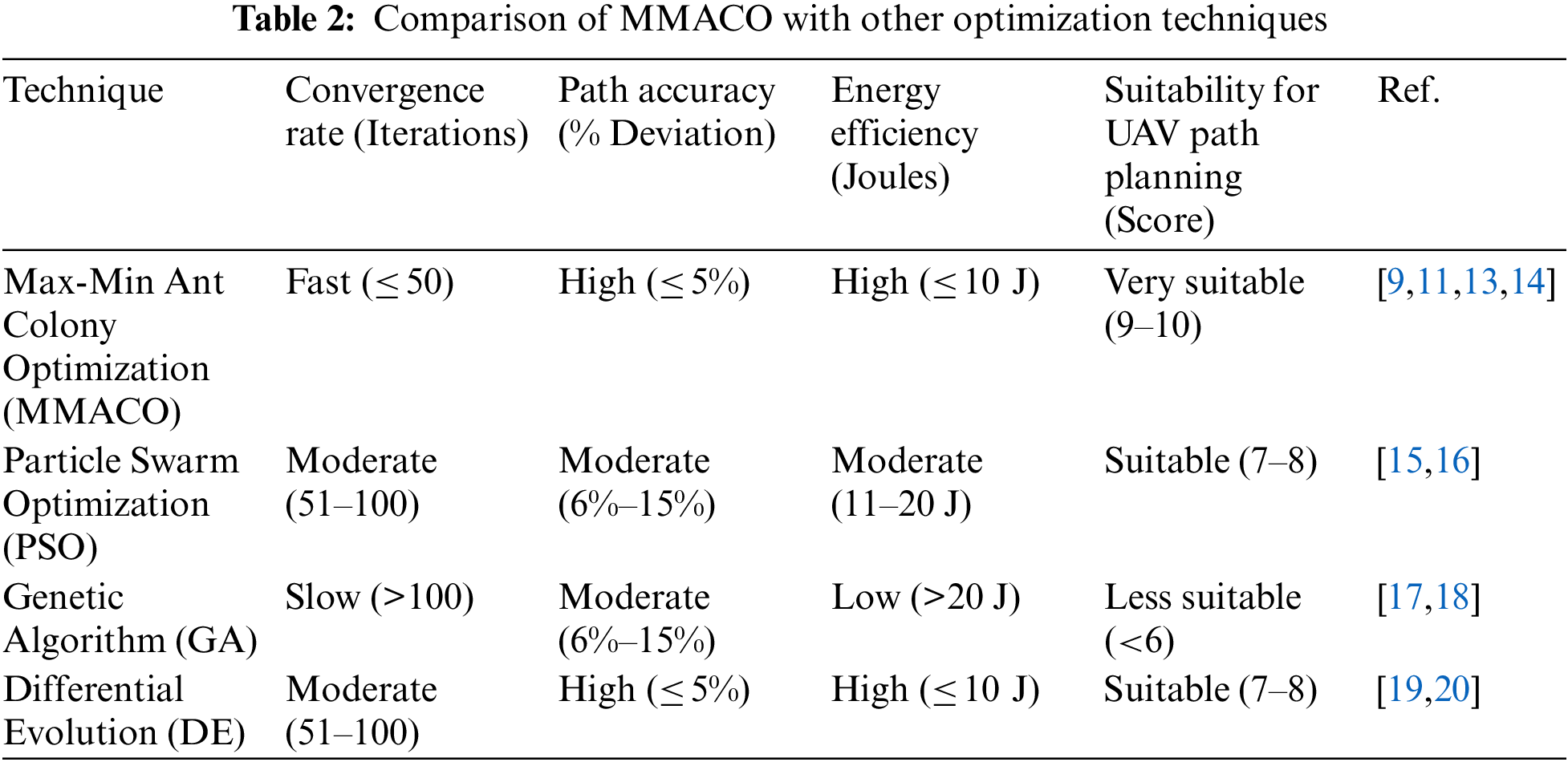
Therefore, the most challenging task in a UAV mission is an optimal tradeoff that should be achieved among the criteria of accuracy, time consumption, and resource utilization [52]. In multi-UAV missions, one of the key cooperation aspects is path planning because avoiding collisions, efficiently exploiting resources, and successfully performing the mission may require accurate coordination between UAVs. That is very important because optimisation methodologies consider both operational limits and real-time environmental circumstances [53,54]. On the other hand, with the increasing complication of UAV activities, there is an increasing need for robust optimization approaches that guarantee safe navigation and collision avoidance, especially in swarm operations of UAVs [55]. Results of a comparison study of MMACO with other proposed optimisation techniques are presented in Table 2.
These technologies can be used in order to gain more resiliency, efficacy, and dependability of the mission at hand [56]. For instance, optimal path planning enhances real-time decision-making, reduces the percentage of missions that fail to complete [57–59], and allows unmanned aerial vehicles to travel safely while accomplishing missions in dynamic environments like disaster zones or crowded airspaces [60–62].
4.1 Max-Min Ant Colony Optimization (MMACO)
Improved Variant: Max-Min Ant Colony Optimisation (MMACO) is a variant of the conventional ACO algorithm, which has been developed to address issues such as sluggish convergence and the propensity to become ensnared in local optima [63,64]. Ants mark pheromones during their foraging to outline optimal pathways to the food source. This common observation forms the basis for the ACO model. These pheromone deposits increase with each ant that crosses a road, therefore increasing the probability that future ants will ultimately use that path. The process will stagnate due to the higher concentration of pheromones, wherein ants may invest too much in exploring the suboptimal paths. MMACO extends this by placing upper and lower bounds on the pheromone, preventing any one path from becoming too dominant. This opens a way for other paths to be explored rather than getting into premature convergence for the algorithm and finding better solutions [65]. In this respect, the MMACO provides real-time decisions and adaptation to the environment to the path-planning problems of UAVs. This establishes a balance in the exploration for new paths and the exploitation of previously effective routes by regulating pheromone levels, while MMACO realizes accelerated convergence rates and enhances solution reliability.
The contribution of the MMACO is significant in convergence rates and allows the UAVs to converge at much faster speeds in case of changing ambient circumstances [66]. This becomes quite helpful during those scenarios when the UAVs have to steer clear of obstacles and unexplored spaces in real-time, say, during industrial inspections or any search-and-rescue missions [67]. This is the preferred method for UAV route planning since MMACO has shown a constant acceleration in convergence with a superior accuracy of paths compared to other optimisation techniques such as PSO or GA. In Table 2, a comparison of MMACO against leading optimisation methodologies is presented [68–70]. It is because of this capability of fast convergence and energy optimisation that the MMACO is far more suitable for UAV path planning in dynamic and time-critical environments. In contrast, GAs are less desirable for real-time UAV operations since they are bound to slow convergence and high processing costs despite their effectiveness in solving complex problems. Similarly, PSO often lacks energy efficiency and adaptiveness despite its usability in specific scenarios [70–73].
4.2 Hybrid Optimization Models
Hybrid optimization models combine the optimum features of various approaches in a search for better solutions to complex problems. The hybrid model includes Cauchy mutation, DE, and MMACO [74,75]. This hybrid method combines the fast local search capabilities of the MMACO with the strong global search potential of DE and the diversity-enhancing Cauchy Mutation to avoid the early convergence of the algorithm to suboptimal solutions. Differential Evolution (DE) represents an evolutionary algorithm utilizing crossover, mutation, and selection mechanisms on a population of candidate solutions [76]. It is known for its efficiency when dealing with large multi-modal search spaces [77,78]. It is claimed that DE improves the hybrid model MMACO-DE in global searching for this algorithm to scan and explore a wider range of potential solutions [79]. Simultaneously, MMACO focuses on the local optimization of paths using the process of pheromone-guided search to fasten convergence toward efficient routing [80]. Cauchy Mutation introduces more randomness into the hybrid, improving it [81]. This helps the algorithm not to be trapped in local optima and continuously searches for better global solutions [82].
Indeed, this hybrid model has been quite effective in real-time optimisation and adaptation in UAV path planning tasks. Quick adaptation and maintaining efficient collision-free flying paths is possible with the hybrid MMACO-DE-Cauchy method when unmanned aerial vehicles traverse through debris and time-changing obstacles during emergency response situations. It is particularly effective at swarm navigation tasks that require a group of UAVs to work together and change their flight paths based on changes in their surroundings [83,84]. Big three constituents-MMACO, DE, and Cauchy Mutation- are integrated into this hybrid model, hence it is an all-encompassing technique for the betterment of UAV operations in challenging settings [85,86]. Fig. 8 shows a rough representation of the proposed hybrid optimisation model using a block diagram. The block diagram presents a scenario where a hybrid optimisation model is considering the pursuit by drones: the follower drones depend on deep neural networks in merging with Proximal Policy Optimisation in tracking a designated target, which is called the tracked drone. It carries out distance and location information of the drone it is tracking, among other important information. The data shall be incorporated into a distributed system responsible for coordination among follower drones. This information is processed by a deep neural network through layers, after which it is flattened, weights are adjusted, and the SoftMax function is applied to make predictions about the actions that are most appropriate. Through continual learning from the surrounding environment and the utilisation of rewards, the PPO algorithm can adjust the action policy, so optimising the motions of the drone and improving its overall performance. Through the utilisation of a hybrid technique that combines traditional trajectory optimisation with reinforcement learning, the behaviour of drones may be adaptively improved in real-time. This approach guarantees efficient path planning, formation control, and effective target tracking in an environment that is both dynamic and distributed.
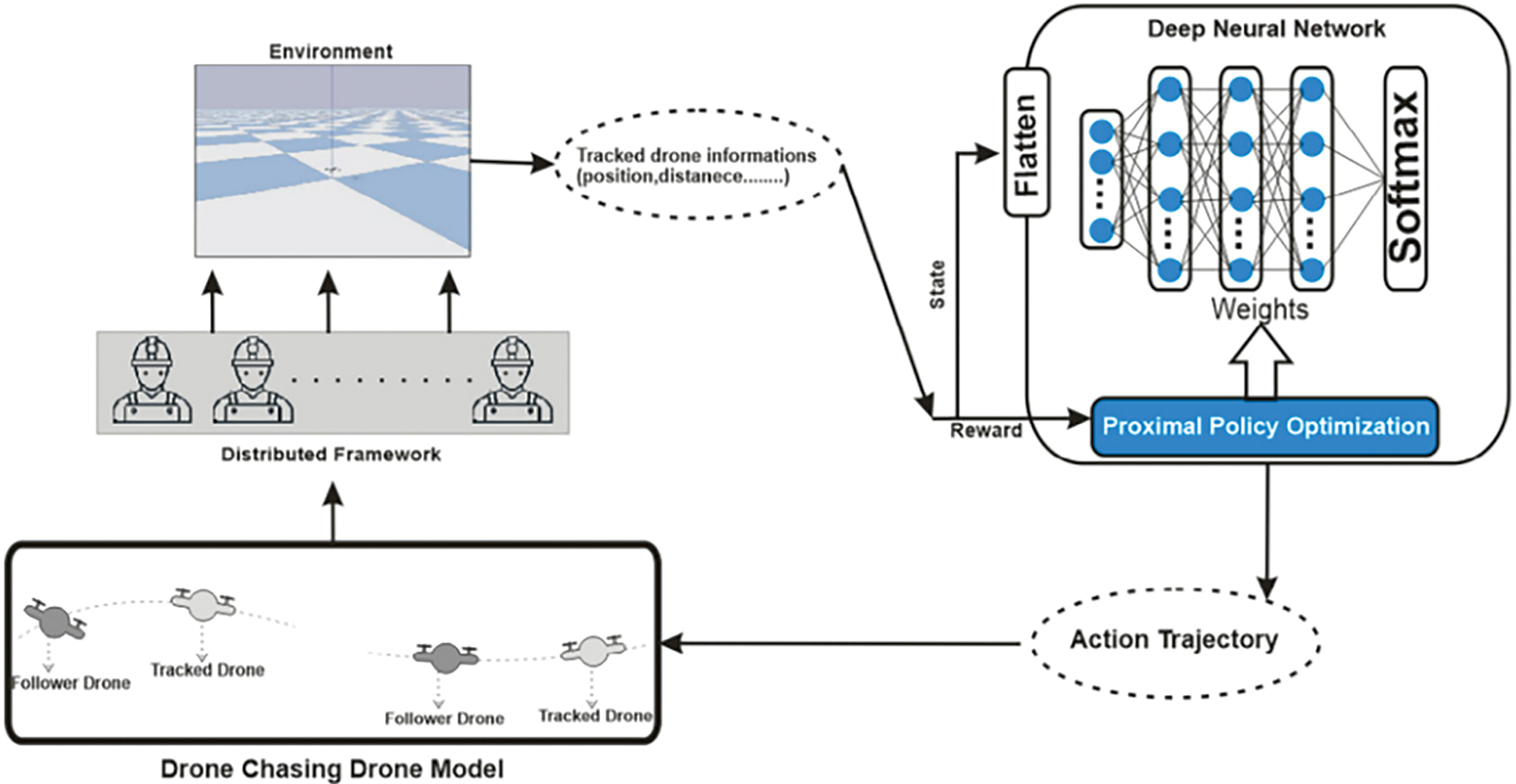
Figure 8: Hybrid optimization model architecture [86]
Moreover, three UAV colonies navigate a dynamic environment within the integrated path planning system for UAV swarms depicted in Fig. 9, which utilises hierarchical clustering and multi-colony systems. The technique consists of two stages: initially, the Max-Min Ant Colony Optimisation (MMACO) algorithm identifies the optimal path for the leader of each colony. In the second phase of the Vicsek Model of Aggregation (MAS), the remaining UAVs adhere to their leaders. The colonies unite to operate as a cohesive network as they approach their goal. They encounter challenges from phenomena such as tornadoes and mountain summits, which require precise coordination to prevent collisions. For effective navigation in this changing environment, all UAVs must achieve synchronisation. The aforementioned scenario succinctly encapsulates the concepts addressed in the pertinent sections by emphasizing the three principal themes of path planning, the application of cluster-based hierarchical methodologies, and the incorporation of social learning principles derived from multi-colony systems.
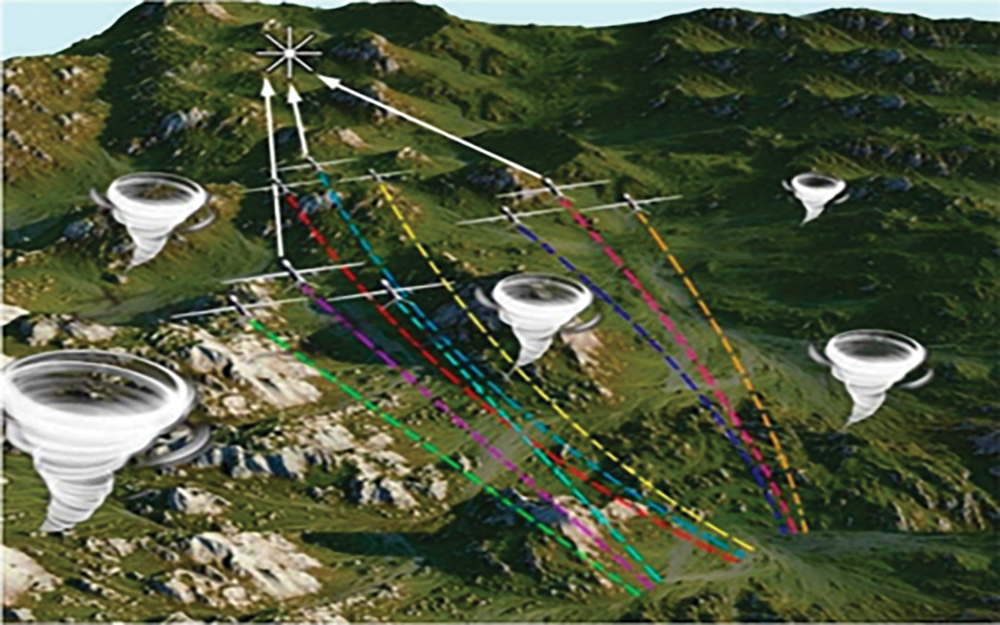
Figure 9: Coordinated path planning for UAV swarms: hierarchical clustering and multi-colony approaches [87]
We present a comprehensive analysis of a hybrid technique that is frequently employed, namely the integration of ACO-PSO (Ant Colony Optimisation and Particle Swarm Optimisation), to address the applicability of hybrid optimisation models. This method enhances the quality of solutions and convergence rates by utilising the global search capabilities of ACO and the local refinement strengths of PSO. For instance, in a hybrid model, ACO is employed to effectively investigate a variety of paths, while PSO refines the most optimal paths for energy-efficient and collision-free routes. These hybrid methods have exhibited superior performance in dynamic environments, particularly in UAV applications, by achieving a balance between exploration and exploitation. Furthermore, their adaptability and robustness are further improved by specific parameter-tuning strategies, such as adaptive weight assignments and pheromone updates. Hybrid models are a promising solution for complex path-planning tasks due to their enhanced computational efficiency and reduced energy consumption in comparison to standalone algorithms.
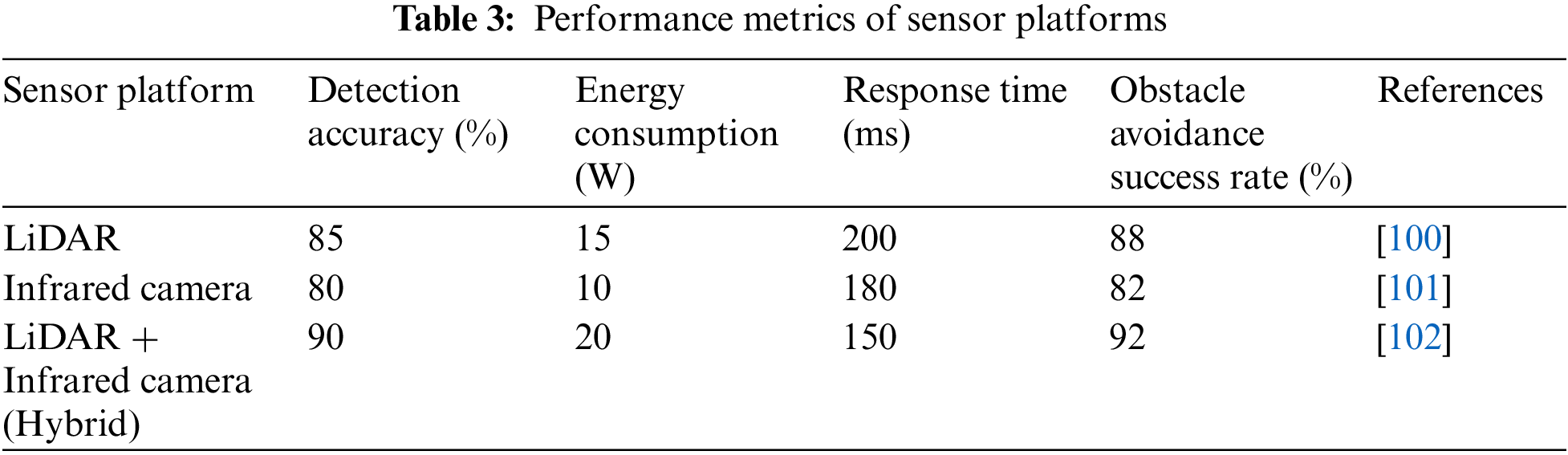
Sensor systems are essential for ensuring precise target tracking and obstacle avoidance in UAV applications [87]. The designs of these platforms integrate several sensing technologies, including GPS modules, LiDAR, ultrasonic sensors, and infrared cameras [88]. Each type of sensor presents specific advantages and comes with specific metrics as shown in Table 3. LiDAR offers accurate distance measurements, rendering it ideal for detecting obstacles in a UAV’s path [89]; conversely, infrared cameras excel at recognizing heat-emitting objects, which is especially advantageous for search and rescue missions. Ultrasonic sensors provide a cost-effective solution for short-range obstacle identification, whereas GPS systems offer accurate positional information, crucial for navigation in both unstructured and organised environments [90]. Integration of data from multiple sensors is essential for a comprehensive sensor platform design [91]. Sensor fusion combines information from a myriad of sources to enhance situational awareness, which is critical to making informed decisions about path planning and collision avoidance. Such limitations become negated when diverse sensor data from different sensors are integrated, such as the performance of LiDAR in adverse weather conditions or the struggles that infrared sensors face in detecting non-thermal obstacles. Advanced data fusion algorithms, many of which incorporate machine learning techniques, enable improved overall navigation performance for the UAV. With such algorithms, the UAV can handle enormous volumes of sensor data and perceive plausible risks with far greater precision [92–95].
The design also must include the payload and energy constraints of the UAV. Lightweight and power-efficient sensors are preferred to enhance flight endurance [96]. The introduction of energy management algorithms that can dynamically allocate power to various systems of the UAV enhances further operational efficiency. The design of the sensor platform of a UAV has to be preoccupied with the aspects of power consumption and performance of the sensor, directly relating to the reliability and duration of the mission [97]. Architecture The design will be modular; this will make scalability and adaptability easier. This modular architecture can allow customization across a number of applications, including urban navigation-where typical obstacle environments are of high densities and therefore different sensor combinations are expected compared to open-field operations [98,99]. Real-time processing capability, enabling quick response and mitigation by the UAV in case of any change in the environment, is a key factor.
The simulation of SIL thus involves replicating real-world conditions and allows for controlled experimentation. For this reason, SIL is widely used in the validation of sensor platforms. SIL simulations are a safe and low-cost way to evaluate obstacle avoidance and target tracking before the deployment of the hardware UAV. These simulations test the robustness of the sensor platform and the efficacy of the algorithms through interactions with various dynamic scenarios, such as wind disturbances, moving obstacles, and complex terrains [100]. Hybrid sensor techniques have been showing remarkable performance validation using SIL simulations. For example, LiDAR combined with infrared cameras provides the possibility of capturing the strengths of the sensors to increase accuracy in detection and reduce false positives 102. Infrared supplementation of LiDAR data significantly enhances information compared to LiDAR alone and enhances overall situational awareness quite drastically [101–103]. These simulation results generally include key metrics like success rate of obstacle avoidance, energy consumption, reaction time, and accuracy of detection, among others, that might be considered necessary in the performance testing of any sensor configuration. The sensor algorithms can be iteratively tested and refined for increased reliability in real-world applications in SIL environments. Such simulation feedback can be used to further optimize the UAV for a variety of operational scenarios, which includes the tuning of its parameters such as the threshold for detection and sensitivity of sensors. These simulations thus enable one to evaluate different navigation strategies and ways in which differing sensor configurations and data processing techniques can enable the UAV to adapt to dynamic environmental conditions.
Considering case studies of current UAV operations for precision agriculture, environmental monitoring, and search and rescue applications, sensor platform performance assessment is indispensable. A hybrid sensor platform that incorporates LiDAR and infrared cameras was designed and tested with the aid of Software-in-the-Loop (SIL) simulations to address challenges such as precise obstacle identification, effective tracking of a target, and energy optimisation [104]. These scenarios included real-world simulation of urban and woodland complex terrains with dynamic obstacles of moving vehicles, pedestrians, and other environmental conditions of wind and rain. Hybrid sensor technology based on the data fusion technique that will combine high-resolution 3D mapping by LiDAR with infrared low-light detection capabilities has been tested against various parameters like obstacle avoidance, target tracking precision, response time, and energy consumption. The success rate from the SIL simulations with SIL was 92% in avoiding obstacles in an urban setting and 85% in thickly forested areas where LiDAR was struggling, but infrared data compensated for this. Success in target tracking reached as high as 98% in low-light conditions due to the better performance coming from infrared. Energy consumption increased by 15% due to the processing needs of the data fusion, but this offsets a reduction of mission time completion by 20%. Iterative testing in the SIL environment allowed for the refinement of sensor algorithms that reduced false positives by 25% while increasing the robustness of the overall system. The simulations provided important insights into how to best optimize the hybrid sensor platform ahead of real-world deployment and showed significant performance gains, especially under challenging conditions [105]. This case underlines the necessity of combining complementary sensor technologies with conducting SIL simulations to enhance UAV performance by iterative testing and refinement [106].
6 Comparative Analysis of Navigation Strategies
Among the most important issues in UAV navigation, the optimal way of projecting the path is an important issue to make operations cost-effective and efficient. The difficulty and multitude of missions that include searching, rescuing, observing, and mapping require the selection of an appropriate navigation approach to ensure the optimization of performance [107–110]. The complexity of terrain, mission objectives, time limits, and energy use become critical factors when defining what the most efficient path is. Whereas there are other path planning methods, two of the most employed and evaluated strategies concern the fastest path and nearest neighbour approaches for various mission types of UAVs. Each of these strategies has its advantages and challenges depending on the type of mission, environmental conditions, and priorities of operations. In the process of UAV navigation planning, much attention should be paid to the comparative analysis of these two methods in their relative advantages and disadvantages [111–115].
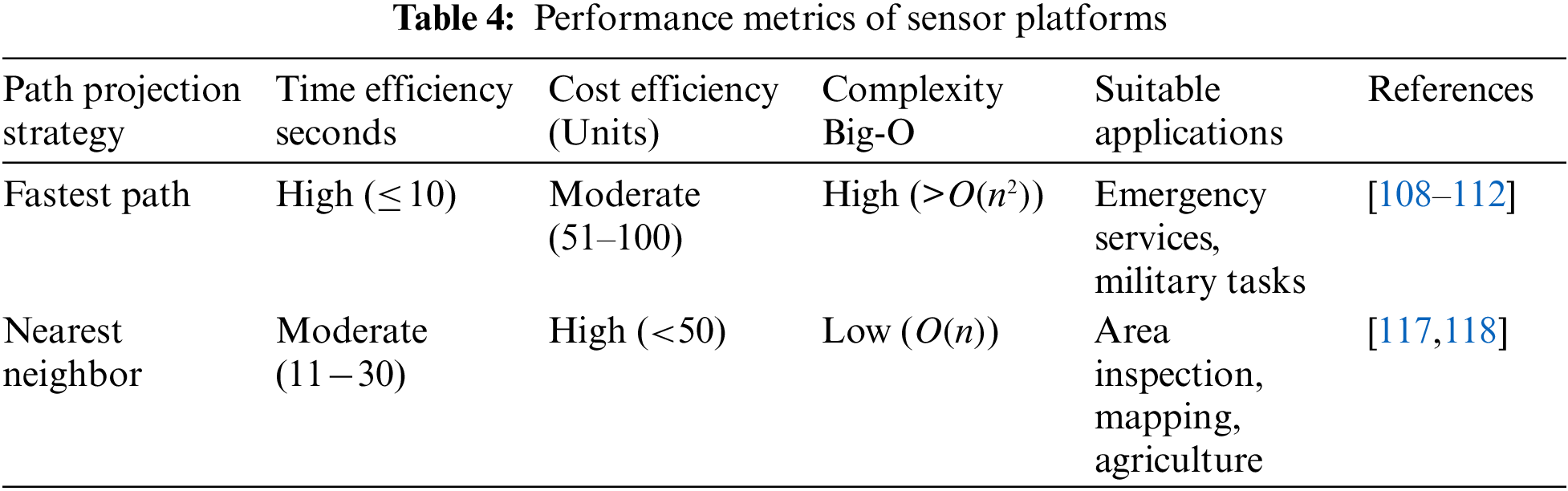
The selection of an appropriate path projection method is key to ensuring cost and time efficiency in UAV navigation planning. Two main strategies have been considered: the Fastest Path and Nearest Neighbour. The strategy of the fastest path aims at minimizing travel time by selecting a route with maximum average speed and few obstacles. It will mainly be useful in time-critical applications where time-based responses are needed for purposes such as emergency services and military services [116]. The general aim of this is to try and avoid delays arising from hurdles by routing options such that the speed is optimized even if the total length of a journey has to be longer. However, this involves deep knowledge of the environment and adaptive readjustment in view of newly arising challenges [117,118]. The Nearest Neighbour strategy pursues to minimize the direct distance towards the next waypoint. This strategy is easier to implement since the UAV flies toward the nearest open location until it reaches all targets. This method is particularly suitable for mapping or inspection tasks where the key objective is to blanket the entire region with the best possible efficiency [117]. On the other hand, suboptimal routes with multiple turns or retracing could highly increase the travel time [118]. The comparative study is presented in Table 4 below:
7 Technical Analysis Related to Key Insights
In the realm of Unmanned Aerial Vehicles, sensor systems are the backbone needed for carrying out two major tasks: target tracking with high accuracy and evasion of obstacles. Most of the designed platforms for UAVs integrate multiple sensing technologies, including GPS modules, LiDAR, ultrasonic sensors, and infrared cameras. Each of the sensor types has its specific advantages, which are described in Table 3, showing the specifications of each sensor. LiDAR provides good accurate distance measurements; it is therefore an ideal choice for obstruction detection in the path of a UAV. On the other hand, infrared cameras are very good at detection objects that emit heat, which becomes quite useful in applications related to search and rescue. In situations where cost needs to be low, ultrasonic sensors provide a good alternative in detection inside a small radius, while GPS systems give position data required for navigation with accuracy in both unstructured and structured environments. Since many sensors are used, integration of the data has great importance in developing an integrated sensor platform. The ability to integrate the data provided by all such sensors is what is referred to as Situational Awareness. This is critical for informed decisions on path planning and collision avoidance. Data integration should substantially raise the level of overall performance by mitigating the constraining effect brought forth by single sensors, such as adverse weather conditions that completely degrade LiDAR performance and make infrared sensors incapable of detecting non-thermal barriers. Advanced data fusion algorithms, many of which are based on machine learning algorithms, are being developed. These enhance the navigation capabilities of the UAV by processing huge volumes of sensor data to identify threats more precisely. In general, the design of sensor systems for UAVs is driven by payload and energy limitations. Slightly lighter and more energy-efficient sensors are in demand for flying time extension, while the integration of energy management algorithms will allow dynamic power distribution within different UAV subsystems, thus significantly improving overall efficiency. A modular sensor platform architecture allows customization to meet many different application demands. For instance, the sensing requirements of autonomous flight within cities differ profoundly from open-field scenarios due to the frequently complex obstacle configurations involved and require specific sensor combinations or a completely different set of sensors.
Real-time processing capabilities enable the UAV to respond quickly to changes in the environment, hence reducing the possibility of collisions. Software-in-the-loop simulations have gained wide acceptance in testing sensor platforms, as they are capable of emulating reality relatively well and also allow for controlled experimentation. These would be the safe and inexpensive ways to test a UAV’s capability concerning obstacle avoidance and target tracking without having to build the hardware. They accomplish this by providing validation of the sensor platform’s robustness and the efficiency of algorithms in many dynamic scenarios, including wind disturbances and moving occlusions. The application of hybrid sensor approaches has increased the performance verification of these simulations immensely. By fusing LiDAR with infrared cameras, they take full advantage of complementary strengths that these sensors bring into play, thereby allowing enhancement in detection accuracy while reducing false positives. Infrared information enriches LiDAR data and, therefore enhances situational awareness. Regarding performance-related statistics, obstacle avoidance success rate, energy consumption, reaction time, and accuracy of detection-all these parameters remain important to establish the relative efficacy of various sensor setups during SIL simulations. These settings enable iterative testing and refinement of sensor algorithms, increasing the reliability of their practical applications. Parameters such as detection thresholds and sensor sensitivity can be optimized on UAVs for a wide range of operating conditions based on the input of simulation models. Simulations allow for an estimation of several navigation strategies and highlight how different sensor configurations and data processing techniques bear upon the ability of a UAV to adapt to variable environmental conditions.
Case studies of current operating UAVs confirm the need to assess sensor platform performance in applications related to precision agriculture, environmental monitoring, and search and rescue. A LiDAR combined with infrared cameras hybrid sensor architecture was designed and tested over SIL simulations to address problems in obstacle detection, efficient target tracking, and energy optimisation. These simulations were done in a natural environment, simulating urban, forest, and complex terrains with moving obstacles like other vehicles, wind, and rain. The hybrid system was implemented and evaluated for data fusion techniques based on characteristics like obstacle avoidance, target tracking accuracy, response time, and energy usage. When LiDAR’s constraints are alleviated with infrared data, SIL simulations ran a 92% success rate in urban obstacle avoidance and an 85% success rate in densely forested regions. This was further bolstered by an astonishing success rate of 98% in target tracking under poor light conditions, thanks to the enriched infrared capabilities. Even though these enriched modalities resulted in a consumption of 15% more energy because of increased data fusion processing, this was well offset by mission completion times that were reduced by 20%. Sensor algorithms were further refined through iterative testing within the SIL environment: −25% reduction in false positives; this enhances the overall robustness of the system. This case study justifies the inclusion of sensors with complementary technologies and the application of SIL simulations to continuously test and optimize to improve the performance of the UAV.
Proper path projection method selection is essentially required for UAVs, whereby operational efficiency and cost-effectiveness are highly influenced. Amongst several strategies of navigation, the best performance must be selected, considering a wide range of missions in UAVs carrying out search and rescue, surveillance, and environmental mapping. Terrain complexity, mission objectives, time limits, and energy consumption are a few aspects that need to be considered while choosing the most efficient route. Of the numerous methodologies for path planning, two of the most salient include the Fastest Path and the Nearest Neighbor strategies; each presents discrete advantages and problems that depend upon mission type, environmental conditions, and operational priorities. Fastest Path tries to save traveling time by selecting a path that has maximum average speed and minimum hindrance; it will be most useful for operations where every second counts, such as emergency services and military operations. This involves focusing more on velocity instead of distance; it requires a deep understanding of the terrain and flexibility in adapting to overcome unexpected obstacles. In contrast, the Nearest Neighbour method directly optimizes the minimum distance toward the next waypoint; its implementation is easy since, starting from any randomly chosen site, the UAV moves to the closest unvisited site until all objectives have been met. It is an effective approach in applications related to mapping or inspection, where usually area coverage is the main goal. However, the obtained route may be inefficient, with repeated turns or even backtracking, probably increasing the time taken to travel between points.
A comparative analysis of the two navigation systems shown in Table 4 highlights their performance metrics including time and cost-effectiveness, complexity, and appropriate application. The Fastest Path algorithm excels in terms of time effectiveness but may incur a costly overhead from its complexity. The Nearest Neighbor algorithm provides a significant cost saving with low complexity and is therefore good for applications such as area inspection and mapping among others. Understanding the advantages and disadvantages of different navigation systems will enable UAV operators to choose the most appropriate approach given a particular mission requirement and condition.
This research offers a thorough examination of the critical role of sensor systems in improving the performance and adaptability of unmanned aerial vehicles (UAVs) in a variety of applications, such as precision agriculture, environmental monitoring, and search and rescue missions. The study emphasises the combined advantages of various sensing technologies, including LiDAR, infrared cameras, ultrasonic sensors, and GPS modules, in facilitating sophisticated target tracking and obstacle avoidance. Hybrid sensor platforms’ capacity to overcome the inherent limitations of individual sensors, including the inability of infrared cameras to detect non-heat-emitting objects and the reduced performance of LiDAR in adverse weather, is a critical discovery. The significance of integrating sensor technologies with advanced data fusion techniques, particularly those that utilise machine learning, to enhance situational awareness and operational effectiveness is emphasised in the review. The critical role of iterative testing and algorithm refinement in bridging the gap between theoretical capabilities and real-world performance is further illustrated by Software-in-the-Loop simulations.
The comparative analysis of navigation strategies, such as the Fastest Path and Nearest Neighbour approaches, provides actionable insights for optimising path planning in the face of varying environmental constraints and mission requirements. These results underscore the ongoing necessity for innovation in data processing techniques and sensor technologies to improve the functionality of UAVs. This work is significant for both academicians and practitioners, as it provides a foundational reference to inform future research and practical implementations. This review helps to advance UAV technology and its applications in increasingly complex operational environments by providing a comprehensive assessment of sensor configurations, navigation algorithms, and their respective implications.
Acknowledgement: The authors want to express their appreciation to IRC-ASE at King Fahd University of Petroleum and Minerals, Kingdom of Saudi Arabia, for partial support through advanced laboratory facilities.
Funding Statement: The authors received no specific funding for this study.
Author Contributions: Study conception and design: Ghulam E Mustafa Abro and Ayman M Abdallah; data collection: Saleem Ahmed and Faizan Zahid; analysis and interpretation of results: Ghulam E Mustafa Abro, Ayman M Abduallah, Saleem Ahmed and Faizan Zahid; draft manuscript preparation: Ghulam E Mustafa Abro, Ayman M Abdallah and Faizan Zahid. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: Data available on request from the authors.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. H. Hildmann and E. Kovacs, “Review: Using unmanned aerial vehicles (UAVs) as mobile sensing platforms (MSPs) for disaster response, civil security and public safety,” Drones, vol. 3, no. 3, 2019, Art. no. 59. doi: 10.3390/drones3030059. [Google Scholar] [CrossRef]
2. Z. A. Ali, A. Israr, E. H. Alkhammash, and M. Hadjouni, “A leader-follower formation control of multi-UAVs via an adaptive hybrid controller,” Complexity, vol. 2021, no. 1, 2021, Art. no. 9231636. doi: 10.1155/2021/9231636. [Google Scholar] [CrossRef]
3. M. Hassanalian and A. Abdelkefi, “Classifications, applications, and design challenges of drones: A review,” Prog. Aerosp. Sci., vol. 91, no. 4, pp. 99–131, 2017. doi: 10.1016/j.paerosci.2017.04.003. [Google Scholar] [CrossRef]
4. H. Xiao, Z. Li, and C. L. Philip Chen, “Formation control of leader-follower mobile robots’ systems using model predictive control based on neural-dynamic optimization,” IEEE Trans. Ind. Electron., vol. 63, no. 9, pp. 5752–5762, 2016. doi: 10.1109/TIE.2016.2542788. [Google Scholar] [CrossRef]
5. G. Dhiman and A. Kaur, “A hybrid algorithm based on particle swarm and spotted hyena optimizer for global optimization,” in Soft Computing for Problem Solving. Singapore: Springer International Publishing, 2019, pp. 599–615. [Google Scholar]
6. J. Luan, Z. Yao, F. Zhao, and X. Song, “A novel method to solve supplier selection problem: Hybrid algorithm of genetic algorithm and ant colony optimization,” Math. Comput. Simul., vol. 156, no. 4, pp. 294–309, 2019. doi: 10.1016/j.matcom.2018.08.011. [Google Scholar] [CrossRef]
7. T. Stützle and H. H. Hoos, “Max-Min ant system,” Future Gener. Comput. Syst., vol. 16, pp. 889–914, 2000. [Google Scholar]
8. H. M. Omar, “Hardware-in-the-loop simulation of time-delayed anti-swing controller for quadrotor with suspended load,” Appl. Sci., vol. 12, no. 3, 2022, Art. no. 1706. doi: 10.3390/app12031706. [Google Scholar] [CrossRef]
9. K. D. Nguyen and C. Ha, “Development of hardware-in-the-loop simulation based on gazebo and pixhawk for unmanned aerial vehicles,” Int. J. Aeronaut. Space Sci., vol. 19, no. 1, pp. 238–249, 2018. doi: 10.1007/s42405-018-0012-8. [Google Scholar] [CrossRef]
10. K. D. Nguyen and T. -T. Nguyen, “Vision-based software-in-the-loop-simulation for unmanned aerial vehicles using gazebo and PX4 open source,” in 2019 Int. Conf. Syst. Sci. Eng. (ICSSE), IEEE, 2019, pp. 429–432. [Google Scholar]
11. A. Altan and R. Hacıoğlu, “Model predictive control of three-axis gimbal system mounted on UAV for real-time target tracking under external disturbances,” Mech. Syst. Signal Process., vol. 138, no. 1, 2020, Art. no. 106548. doi: 10.1016/j.ymssp.2019.106548. [Google Scholar] [CrossRef]
12. A. M. Isaev, A. S. Adamchuk, S. R. Amirokov, M. A. Isaev, and M. A. Grazhdankin, “Mathematical modelling of the stabilization system for a mobile base video camera using quaternions,” in Marco S, Massimo M, Drozdova VI, Kalmykov IA, Eds., Proc. REMS 2018—Russian Fed. Eur. Multidiscip. Symp. Comput. Sci. ICT, Stavropol—Dombay, Russia, 2018. pp. 51–62. [Google Scholar]
13. M. H. Ahmad, K. Osman, M. F. M. Zakeri, and S. I. Samsudin, “Mathematical modelling and PID controller design for two DOF gimbal system,” in 2021 IEEE 17th Int. Colloq. Signal Process. Appl. (CSPA), IEEE, 2021, pp. 138–143. [Google Scholar]
14. D. Lancovs, “Broadcast transponders for low flying unmanned aerial vehicles,” Transp. Res. Procedia, vol. 24, no. 4, pp. 370–376, 2017. doi: 10.1016/j.trpro.2017.05.098. [Google Scholar] [CrossRef]
15. H. Shakhatreh et al., “Unmanned aerial vehicles (UAVsA survey on civil applications and key research challenges,” IEEE Access, vol. 7, pp. 48572–48634, 2019. doi: 10.1109/ACCESS.2019.2909530. [Google Scholar] [CrossRef]
16. P. Sánchez, R. Casado, and A. Bermúdez, “Real-time collision-free navigation of multiple UAVs based on bounding boxes,” Electronics, vol. 9, no. 10, 2020, Art. no. 1632. [Google Scholar]
17. A. Tullu, M. Hassanalian, and H. -Y. Hwang, “Design and implementation of sensor platform for uav-based target tracking and obstacle avoidance,” Drones, vol. 6, no. 4, 2022, Art. no. 89. doi: 10.3390/drones6040089. [Google Scholar] [CrossRef]
18. M. Quigley, M. A. Goodrich, S. Griffiths, A. Eldredge, and R. W. Beard, “Target acquisition, localization, and surveillance using a fixed-wing mini-UAV and gimbaled camera,” in Proc. 2005 IEEE Int. Conf. Robot. Automation, IEEE, 2005, pp. 2600–2605. [Google Scholar]
19. Z. A. Ali, H. Zhangang, and W. B. Hang, “Cooperative path planning of multiple UAVs by using max-min ant colony optimization along with cauchy mutant operator,” Fluctuation Noise Lett., vol. 20, no. 1, 2021, Art. no. 2150002. doi: 10.1142/S0219477521500024. [Google Scholar] [CrossRef]
20. R. Poli, J. Kennedy, and T. Blackwell, “Particle swarm optimization: An overview,” Swarm Intell., vol. 1, no. 1, pp. 33–57, 2007. doi: 10.1007/s11721-007-0002-0. [Google Scholar] [CrossRef]
21. H. Duan and P. Qiao, “Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning,” Int. J. Intell. Comput. Cybern., vol. 7, no. 1, pp. 24–37, 2014. doi: 10.1108/IJICC-02-2014-0005. [Google Scholar] [CrossRef]
22. W. Cai, Z. Liu, M. Zhang, and C. Wang, “Cooperative artificial intelligence for underwater robotic swarm,” Robot. Auton. Syst., vol. 164, no. 1, 2023, Art. no. 104410. doi: 10.1016/j.robot.2023.104410. [Google Scholar] [CrossRef]
23. H. Qiu and H. Duan, “A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles,” Inf. Sci., vol. 509, no. 6, pp. 515–529, 2020. doi: 10.1016/j.ins.2018.06.061. [Google Scholar] [CrossRef]
24. K. A. Ghamry, M. A. Kamel, and Y. Zhang, “Multiple UAVs in forest fire fighting mission using particle swarm optimization,” in 2017 Int. Conf. Unmanned Aircr. Syst. (ICUAS), IEEE, 2017, pp. 1404–1409. [Google Scholar]
25. S. Vijh, P. Gaurav, and H. M. Pandey, “Hybrid bio-inspired algorithm and convolutional neural network for automatic lung tumor detection,” Neural Comput. Appl., vol. 35, no. 33, pp. 23711–23724, 2023. doi: 10.1007/s00521-020-05362-z. [Google Scholar] [CrossRef]
26. R. Wang and J. Liu, “Adaptive formation control of quadrotor unmanned aerial vehicles with bounded control thrust,” Chin. J. Aeronaut., vol. 30, no. 2, pp. 807–817, 2017. doi: 10.1016/j.cja.2017.01.007. [Google Scholar] [CrossRef]
27. J. Li, X. Li, and Q. Su, “Fault detection filter design for discrete-time switched time-delay systems with static quantizer and quantized feedback,” Int. J. Innovat. Comput., Inf. Contr., vol. 14, no. 4, pp. 1465–1479, 2018. [Google Scholar]
28. Z. Ali, D. Wang, and M. Aamir, “Fuzzy-based hybrid control algorithm for the stabilization of a tri-rotor UAV,” Sensors, vol. 16, no. 5, 2016, Art. no. 652. doi: 10.3390/s16050652. [Google Scholar] [PubMed] [CrossRef]
29. J. Zhang and J. Yan, “A novel control approach for flight stability of fixed-wing UAV formation with wind field,” IEEE Syst. J., vol. 15, no. 2, pp. 2098–2108, 2021. doi: 10.1109/JSYST.2020.3002809. [Google Scholar] [CrossRef]
30. C. Zhao, S. Dai, G. Zhao, S. Liu, and J. Wen, “Cluster space formation control for multiple quadrotors based on fuzzy PD control algorithm,” in Proc. 2019 Chin. Autom. Congr. (CAC), Hangzhou, China, IEEE, Nov. 2019, pp. 4146–4151. [Google Scholar]
31. A. Sargolzaei, A. Abbaspour, and C. D. Crane, “Control of cooperative unmanned aerial vehicles: Review of applications, challenges, and algorithms,” in Advances in Intelligent Systems and Computing. Cham, Switzerland: Springer, 2020, pp. 229–255. [Google Scholar]
32. Y. Li, G. Zhou, W. Chen, and S. Zhang, “Design of UAV close formation controller based on sliding mode variable structure,” in Advances in Intelligent Systems and Computing. Cham, Switzerland: Springer, 2017, pp. 463–476. [Google Scholar]
33. C. Zhu, X. Liang, L. He, and L. Liu, “Demonstration and verification system for UAV formation control,” in Proc. 2017 3rd IEEE Int. Conf. Control Sci. Syst. Eng. (ICCSSE), Beijing, China, IEEE, Aug. 2017, pp. 56–60. [Google Scholar]
34. J. Wang, L. Han, X. Li, X. Dong, Q. Li and R. Zhang, “Time varying formation of second-order discrete-time multi-agent systems under non-uniform communication delays and switching topology with application to UAV formation flying,” IET Control Theory Appl., vol. 14, no. 14, pp. 1947–1956, 2020. doi: 10.1049/iet-cta.2020.0183. [Google Scholar] [CrossRef]
35. T. V. Pham and T. D. Nguyen, “Path-following formation of fixed-wing UAVs under communication delay: A vector field approach,” Drones, vol. 8, no. 6, 2024, Art. no. 237. doi: 10.3390/drones8060237. [Google Scholar] [CrossRef]
36. R. K. Vander Meer and L. E. Alonso, “Pheromone directed behavior in ants,” in Pheromone Communication in Social Insects. Boca Raton, FL, USA: CRC Press, 1998, pp. 159–192. [Google Scholar]
37. M. L. Cain, “Random search by herbivorous insects: A simulation model,” Ecology, vol. 66, no. 3, pp. 876–888, 1985. doi: 10.2307/1940550. [Google Scholar] [CrossRef]
38. W. J. Bell, “Searching behavior patterns in insects,” Annu. Rev. Entomol., vol. 35, no. 1, pp. 447–467, 1990. doi: 10.1146/annurev.en.35.010190.002311. [Google Scholar] [CrossRef]
39. F. Yan, Y. -S. Liu, and J. -Z. Xiao, “Path planning in complex 3D environments using a probabilistic roadmap method,” Int. J. Autom. Comput., vol. 10, no. 6, pp. 525–533, 2013. doi: 10.1007/s11633-013-0750-9. [Google Scholar] [CrossRef]
40. W. Zhang, Y. Ning, and C. Suo, “A method based on multi-sensor data fusion for UAV safety distance diagnosis,” Electronics, vol. 8, no. 12, 2019, Art. no. 1467. [Google Scholar]
41. C. Zhang, Z. Zhen, D. Wang, and M. Li, “UAV path planning method based on ant colony optimization,” in Proc. Chin. Control Decis. Conf., Xuzhou, China, May 26–28, 2010, pp. 3790–3792. [Google Scholar]
42. A. A. Najm and I. K. Ibraheem, “Nonlinear PID controller design for a 6-DOF UAV quadrotor system,” Eng. Sci. Technol., vol. 22, no. 4, pp. 1087–1097, 2019. doi: 10.1016/j.jestch.2019.02.005. [Google Scholar] [CrossRef]
43. J. Saunders, B. Call, A. Curtis, R. Beard, and T. McLain, “Static and dynamic obstacle avoidance in miniature air vehicles,” in AIAA nfotech@Aerospace, Arlington, Virginia, 2005. doi: 10.2514/6.2005-6950. [Google Scholar] [CrossRef]
44. J. Burgués and S. Marco, “Environmental chemical sensing using small drones: A review,” Sci. Total Environ., vol. 748, no. 6075, 2020, Art. no. 141172. doi: 10.1016/j.scitotenv.2020.141172. [Google Scholar] [PubMed] [CrossRef]
45. M. L. Smith, L. N. Smith, and M. F. Hansen, “The quiet revolution in machine vision-a state-of-the-art survey paper, including historical review, perspectives, and future directions,” Comput. Ind., vol. 130, no. 2, 2021, Art. no. 103472. doi: 10.1016/j.compind.2021.103472. [Google Scholar] [CrossRef]
46. A. Agarwal, S. Kumar, and D. Singh, “Development of neural network based adaptive change detection technique for land terrain monitoring with satellite and drone images,” Def. Sci. J., vol. 69, no. 5, pp. 474–480, 2019. doi: 10.14429/dsj.69.14954. [Google Scholar] [CrossRef]
47. M. Salhaoui, A. Guerrero-González, M. Arioua, F. J. Ortiz, A. El Oualkadi and C. L. Torregrosa, “Smart industrial IoT monitoring and control system based on UAV and cloud computing applied to a concrete plant,” Sensors, vol. 19, no. 15, 2019, Art. no. 3316. doi: 10.3390/s19153316. [Google Scholar] [PubMed] [CrossRef]
48. A. Glaser, “Police departments are using drones to find and chase down suspects,” Vox. 2017. Accessed: Dec. 28, 2021. [Online]. Available: https://www.vox.com/2017/4/6/15209290/police-fire-department-acquired-drone-us-flying-robot-law-enforcement [Google Scholar]
49. P. J. Hardin and R. R. Jensen, “Small-scale unmanned aerial vehicles in environmental remote sensing: Challenges and opportunities,” J. GISci. Remote Sens, vol. 48, pp. 99–111, 2011. doi: 10.2747/1548-1603.48.1.99. [Google Scholar] [CrossRef]
50. B. N. Chand, P. Mahalakshmi, and V. P. S. Naidu, “Sense and avoid technology in unmanned aerial vehicles: A review,” in Proc. Int. Conf. Electr. Electron. Commun. Comput. Optim. Tech., Mysuru, India, Dec. 15–16, 2017. [Google Scholar]
51. P. J. Hardin, V. Lulla, R. R. Jensen, and J. R. Jensen, “Small unmanned aerial systems (sUAS) for environmental remote sensing: Challenges and opportunities revisited,” GISci. Remote Sens., vol. 56, pp. 309–322, 2019. doi: 10.1080/15481603.2018.1510088. [Google Scholar] [CrossRef]
52. W. -Y. Ruan and H. -B. Duan, “Multi-UAV obstacle avoidance control via multi-objective social learning pigeon-inspired optimization,” Front. Inf. Technol. Electron. Eng., vol. 21, no. 5, pp. 740–748, 2020. doi: 10.1631/FITEE.2000066. [Google Scholar] [CrossRef]
53. H. Hamidi and A. Kamankesh, “An approach to intelligent traffic management system using a multi-agent system,” Int. J. Intell. Transp. Syst. Res., vol. 16, no. 2, pp. 112–124, 2018. doi: 10.1007/s13177-017-0142-6. [Google Scholar] [CrossRef]
54. M. M. Gulzar, S. T. H. Rizvi, M. Y. Javed, U. Munir, and H. Asif, “Multi-agent cooperative control consensus: A comparative review,” Electronics, vol. 7, no. 2, 2018, Art. no. 22. doi: 10.3390/electronics7020022. [Google Scholar] [CrossRef]
55. A. Khan et al., “Human gait recognition using deep learning and improved ant colony optimization,” Comput. Mater. Contin., vol. 70, no. 2, pp. 2113–2130, 2022. doi: 10.32604/cmc.2022.018270. [Google Scholar] [CrossRef]
56. R. Cheng and Y. Jin, “A social learning particle swarm optimization algorithm for scalable optimization,” Inf. Sci., vol. 291, no. 2, pp. 43–60, 2015. doi: 10.1016/j.ins.2014.08.039. [Google Scholar] [CrossRef]
57. B. Shi and Y. Zhang, “A novel algorithm to optimize the energy consumption using IoT and based on ant colony algorithm,” Energies, vol. 14, no. 6, 2021, Art. no. 1709. doi: 10.3390/en14061709. [Google Scholar] [CrossRef]
58. A. Shetty, A. Shetty, K. S. Puthusseri, and R. Shankaramani, “An improved ant colony optimization algorithm: Minion Ant (MAnt) and its application on TSP,” in 2018 IEEE Symp. Ser. Comput. Intell. (SSCI), IEEE, 2018, pp. 1219–1225. [Google Scholar]
59. K. Li, Y. Han, and X. Yan, “Distributed multi-UAV cooperation for dynamic target tracking optimized by an SAQPSO algorithm,” ISA Trans., vol. 129, no. 9, pp. 230–242, 2022. doi: 10.1016/j.isatra.2021.12.014. [Google Scholar] [PubMed] [CrossRef]
60. L. Ambroziak and M. Ciężkowski, “Virtual electric dipole field applied to autonomous formation flight control of unmanned aerial vehicles,” Sensors, vol. 21, no. 13, 2021, Art. no. 4540. doi: 10.3390/s21134540. [Google Scholar] [PubMed] [CrossRef]
61. W. Suo, M. Wang, D. Zhang, Z. Qu, and L. Yu, “Formation control technology of fixed-wing UAV swarm based on distributed ad hoc network,” Appl. Sci., vol. 12, no. 2, p. 535, 2022. [Google Scholar]
62. X. Zhang, S. Xia, T. Zhang, and X. Li, “Hybrid FWPS cooperation algorithm based unmanned aerial vehicle constrained path planning,” Aerosp. Sci. Technol., vol. 118, 2021, Art. no. 107004. doi: 10.1016/j.ast.2021.107004. [Google Scholar] [CrossRef]
63. Z. A. Ali, H. Zhangang, and D. Zhengru, “Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment,” Meas. Control, vol. 56, no. 3–4, pp. 459–469, 2023. [Google Scholar]
64. Z. A. Ali, Z. Han, and R. J. Masood, “Collective motion and self-organization of a swarm of UAVs: A cluster-based architecture,” Sensors, vol. 21, no. 11, p. 3820, 2021. [Google Scholar] [PubMed]
65. S. Liang, B. Song, and D. Xue, “Landing route planning method for micro drones based on hybrid optimization algorithm,” Biomim. Intell. Robot., vol. 1, 2021, Art. no. 100003. [Google Scholar]
66. H. S. Ilango and R. Ramanathan, “A performance study of bio-inspired algorithms in autonomous landing of unmanned aerial vehicle,” Procedia Comput. Sci., vol. 171, no. 7, pp. 1449–1458, 2020. doi: 10.1016/j.procs.2020.04.155. [Google Scholar] [CrossRef]
67. Z. Shao, F. Yan, Z. Zhou, and X. Zhu, “Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization,” Appl. Sci., vol. 9, no. 13, 2019, Art. no. 2621. doi: 10.3390/app9132621. [Google Scholar] [CrossRef]
68. Z. Zhen, Y. Chen, L. Wen, and B. Han, “An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment,” Aerosp. Sci. Technol., vol. 100, no. 13, 2020, Art. no. 105826. doi: 10.1016/j.ast.2020.105826. [Google Scholar] [CrossRef]
69. C. Qu, W. Gai, M. Zhong, and J. Zhang, “A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning,” Appl. Soft Comput., vol. 89, no. 1, 2020, Art. no. 106099. doi: 10.1016/j.asoc.2020.106099. [Google Scholar] [CrossRef]
70. C. Xu, M. Xu, and C. Yin, “Optimized multi-UAV cooperative path planning under the complex confrontation environment,” Comput. Commun., vol. 162, no. 17, pp. 196–203, 2020. doi: 10.1016/j.comcom.2020.04.050. [Google Scholar] [CrossRef]
71. J. Huang and W. Sun, “A method of feasible trajectory planning for UAV formation based on bi-directional fast search tree,” Optik, vol. 221, no. 1, 2020, Art. no. 165213. doi: 10.1016/j.ijleo.2020.165213. [Google Scholar] [CrossRef]
72. C. Zhang, C. Hu, J. Feng, Z. Liu, Y. Zhou and Z. Zhang, “A self-heuristic ant-based method for path planning of unmanned aerial vehicle in complex 3-D space with dense U-type obstacles,” IEEE Access, vol. 7, pp. 150775–150791, 2019. doi: 10.1109/ACCESS.2019.2946448. [Google Scholar] [CrossRef]
73. C. Qu, W. Gai, J. Zhang, and M. Zhong, “A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning,” Knowl. Based Syst., vol. 194, no. 2, 2020, Art. no. 105530. doi: 10.1016/j.knosys.2020.105530. [Google Scholar] [CrossRef]
74. G. Jain, G. Yadav, D. Prakash, A. Shukla, and R. Tiwari, “MVO-based path planning scheme with coordination of UAVs in 3-D environment,” J. Comput. Sci., vol. 37, no. 1, 2019, Art. no. 101016. doi: 10.1016/j.jocs.2019.07.003. [Google Scholar] [CrossRef]
75. S. Shao, Y. Peng, C. He, and Y. Du, “Efficient path planning for UAV formation via comprehensively improved particle swarm optimization,” ISA Trans., vol. 97, no. 1–4, pp. 415–430, 2020. doi: 10.1016/j.isatra.2019.08.018. [Google Scholar] [PubMed] [CrossRef]
76. Z. Liu and L. Guo, “Connectivity and synchronization of Vicsek model,” Sci. China Ser. F: Inf. Sci., vol. 51, no. 7, pp. 848–858, 2008. [Google Scholar]
77. X. Wang, S. Li, X. Yu, and J. Yang, “Distributed active anti-disturbance consensus for leader-follower higher-order multi-agent systems with mismatched disturbances,” IEEE Trans. Automat. Contr., vol. 62, no. 11, pp. 5795–5801, 2016. doi: 10.1109/TAC.2016.2638966. [Google Scholar] [CrossRef]
78. A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groups of mobile autonomous agents using nearest neighbor rules,” IEEE Trans. Automat. Contr., vol. 48, no. 6, pp. 988–1001, 2003. doi: 10.1109/TAC.2003.812781. [Google Scholar] [CrossRef]
79. H. -B. Duan, X. -Y. Zhang, J. Wu, and G. -J. Ma, “Max-min adaptive ant colony optimization approach to multi-UAVs coordinated trajectory replanning in dynamic and uncertain environments,” J. Bionic Eng., vol. 6, no. 2, pp. 161–173, 2009. doi: 10.1016/S1672-6529(08)60113-4. [Google Scholar] [CrossRef]
80. M. M. Fouad, A. I. El-Desouky, R. Al-Hajj, E. -S. M. El-Kenawy, “Dynamic group-based cooperative optimization algorithm,” IEEE Access, vol. 8, pp. 148378–148403, 2020. doi: 10.1109/ACCESS.2020.3015892. [Google Scholar] [CrossRef]
81. J. Wang, Y. Gao, C. Zhou, S. Sherratt, and L. Wang, “Optimal coverage multi-path scheduling scheme with multiple mobile sinks for WSNs,” Comput., Mater. Contin., vol. 62, no. 2, pp. 695–711, 2020. doi: 10.32604/cmc.2020.08674. [Google Scholar] [CrossRef]
82. Z. Tan, and M. Karaköse, “A new approach for drone tracking with drone using proximal policy optimization based distributed deep reinforcement learning,” SoftwareX, vol. 23, no. 3, 2023, Art. no. 101497. doi: 10.1016/j.softx.2023.101497. [Google Scholar] [CrossRef]
83. J. Liu, S. Xu, F. Zhang, and L. Wang, “A hybrid genetic-ant colony optimization algorithm for the optimal path selection,” Intell. Autom. Soft Comput., vol. 23, no. 2, pp. 235–242, 2017. doi: 10.1080/10798587.2016.1196926. [Google Scholar] [CrossRef]
84. S. Al-Shihabi and M. Aldurgam, “Multi-objective optimization for the multi-mode finance-based project scheduling problem,” Front. Eng. Manage., vol. 7, no. 2, pp. 223–237, 2020. doi: 10.1007/s42524-020-0097-1. [Google Scholar] [CrossRef]
85. M. Jafarian and C. De Persis, “Formation control using binary information,” Automatica, vol. 53, no. 8, pp. 125–135, 2015. doi: 10.1016/j.automatica.2014.12.016. [Google Scholar] [CrossRef]
86. A. Abdessameud and A. Tayebi, “Formation control of VTOL unmanned aerial vehicles with communication delays,” Automatica, vol. 47, no. 11, pp. 2383–2394, 2011. doi: 10.1016/j.automatica.2011.08.042. [Google Scholar] [CrossRef]
87. Z. Sui, Z. Pu, J. Yi, and S. Wu, “Formation control with collision avoidance through deep reinforcement learning using model-guided demonstration,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 6, pp. 2358–2372, 2020. doi: 10.1109/TNNLS.2020.3004893. [Google Scholar] [PubMed] [CrossRef]
88. Y. Kartal, K. Subbarao, N. R. Gans, A. Dogan, and F. Lewis, “Distributed backstepping based control of multiple UAV formation flight subject to time delays,” IET Control Theory Appl., vol. 14, no. 12, pp. 1628–1638, 2020. doi: 10.1049/iet-cta.2019.1151. [Google Scholar] [CrossRef]
89. L. Wei, M. Chen, and T. Li, “Dynamic event-triggered cooperative formation control for UAVs subject to time-varying disturbances,” IET Control Theory Appl., vol. 14, no. 17, pp. 2514–2525, 2020. doi: 10.1049/iet-cta.2020.0342. [Google Scholar] [CrossRef]
90. M. Shafiq, Z. A. Ali, E. H. Alkhammash, “A cluster-based hierarchical-approach for the path planning of swarm,” Appl. Sci., vol. 11, no. 15, 2021, Art. no. 6864. doi: 10.3390/app11156864. [Google Scholar] [CrossRef]
91. K. A. Ghamry and Y. Zhang, “Formation control of multiple quadrotors based on leader-follower method,” in 2015 Int. Conf. Unmanned Aircr. Syst. (ICUAS), IEEE, 2015, pp. 1037–1042. [Google Scholar]
92. X. Chen et al., “A novel virtual-structure formation control design for mobile robots with obstacle avoidance,” Appl. Sci., vol. 10, no. 17, 2020, Art. no. 5807. doi: 10.3390/app10175807. [Google Scholar] [CrossRef]
93. J. Hu, and G. Feng, “Distributed tracking control of leader-follower multi-agent systems under noisy measurement,” Automatica, vol. 46, no. 8, pp. 1382–1387, 2010. doi: 10.1016/j.automatica.2010.05.020. [Google Scholar] [CrossRef]
94. J. Yan, X. Guan, X. Luo, and C. Chen, “Formation control and obstacle avoidance for multi-agent systems based on virtual leader-follower strategy,” Int. J. Inf. Technol. Decis. Mak., vol. 16, no. 3, pp. 865–880, 2017. doi: 10.1142/S0219622014500151. [Google Scholar] [CrossRef]
95. P. Zhang, M. de Queiroz, “3D multi-agent formation control with rigid body maneuvers,” Asian J. Control, vol. 21, no. 3, pp. 1088–1099, 2019. doi: 10.1002/asjc.1814. [Google Scholar] [CrossRef]
96. Y. Liu, and R. Bucknall, “A survey of formation control and motion planning of multiple unmanned vehicles,” Robotica, vol. 36, no. 7, pp. 1019–1047, 2018. doi: 10.1017/S0263574718000218. [Google Scholar] [CrossRef]
97. R. W. Beard, J. Lawton, and F. Y. Hadaegh, “A coordination architecture for spacecraft formation control,” IEEE Trans. Control Syst. Technol., vol. 9, no. 6, pp. 777–790, 2001. doi: 10.1109/87.960341. [Google Scholar] [CrossRef]
98. H. Duan, J. Zhao, Y. Deng, Y. Shi, X. Ding, “Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 1, pp. 706–720, 2020. doi: 10.1109/TAES.2020.3029624. [Google Scholar] [CrossRef]
99. Y. Kanza, E. Safra, Y. Sagiv, and Y. Doytsher, “Heuristic algorithms for route-search queries over geographical data,” in Proc. 16th ACM SIGSPATIAL Int. Conf. Adv. Geogr. Inf. Syst., 2008, pp. 1–10. [Google Scholar]
100. X. Yang, “Swarm-based metaheuristic algorithms and no-free-lunch theorems,” Theory New Appl. Swarm Intell., 2012. doi: 10.5772/1405. [Google Scholar] [CrossRef]
101. I. Fister Jr, X. -S. Yang, I. Fister, J. Brest, and D. Fister, “A brief review of nature-inspired algorithms for optimization,” 2013, arXiv:1307.4186. [Google Scholar]
102. S. Behera, S. Sahoo, and B. B. Pati, “A review on optimization algorithms and application to wind energy integration to grid,” Renew. Sustain. Energ. Rev., vol. 48, no. 6, pp. 214–227, 2015. doi: 10.1016/j.rser.2015.03.066. [Google Scholar] [CrossRef]
103. D. Ferguson, T. M. Howard, and M. Likhachev, “Motion planning in urban environments,” J. Field Robot., vol. 25, no. 11–12, pp. 939–960, 2008. doi: 10.1002/rob.20265. [Google Scholar] [CrossRef]
104. J. -W. Park, H. -D. Oh, and M. -J. Tahk, “UAV collision avoidance based on geometric approach,” in 2008 SICE Annu. Conf., IEEE, 2008, pp. 2122–2126. [Google Scholar]
105. S. A. Bortoff, “Path planning for UAVs,” in Proc. 2000 American Control Conf. ACC (IEEE Cat. No. 00CH36334), IEEE, 2000, pp. 364–368. [Google Scholar]
106. N. E. Du Toit and J. W. Burdick, “Robotic motion planning in dynamic, cluttered, uncertain environments,” in 2010 IEEE Int. Conf. Robot. Autom., IEEE, 2010, pp. 966–973. [Google Scholar]
107. Z. A. Ali, D. B. Wang, and M. S. Loya, “SURF and LA with RGB vector space based detection and monitoring of manholes with an application to tri-rotor UAS images,” Int. J. Eng. Technol., vol. 9, no. 1, pp. 32–39, 2017. doi: 10.7763/IJET.2017.V9.941. [Google Scholar] [CrossRef]
108. S. Aggarwal, and N. Kumar, “Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges,” Comput. Commun., vol. 149, no. 12, pp. 270–299, 2020. doi: 10.1016/j.comcom.2019.10.014. [Google Scholar] [CrossRef]
109. R. Azoulay, Y. Haddad, and S. Reches, “Machine learning methods for management UAV flocks–A survey,” 2021, arXiv:2108.13448. [Google Scholar]
110. P. Fraga-Lamas, L. Ramos, V. Mondéjar-Guerra, and T. M. Fernández-Caramés, “A review on IoT deep learning UAV systems for autonomous obstacle detection and collision avoidance,” Remote Sens., vol. 11, no. 18, 2019, Art. no. 2144. doi: 10.3390/rs11182144. [Google Scholar] [CrossRef]
111. A. Stentz, “Optimal and efficient path planning for partially-known environments,” in Proc. 1994 IEEE Int. Conf. Robot. Autom., IEEE, 1994, pp. 3310–3317. [Google Scholar]
112. M. Pachter, J. J. D’Azzo, and J. L. Dargan, “Automatic formation flight control,” J. Guid., Control, Dyn., vol. 17, no. 6, pp. 1380–1383, 1994. doi: 10.2514/3.21364. [Google Scholar] [CrossRef]
113. Z. Wang, R. Liu, Q. Liu, J. S. Thompson, M. Kadoch, “Energy-efficient data collection and device positioning in UAV-assisted IoT,” IEEE Internet Things J., vol. 7, no. 2, pp. 1122–1139, 2019. doi: 10.1109/JIOT.2019.2952364. [Google Scholar] [CrossRef]
114. R. K. Rangel, K. H. Kienitz, and M. P. Brandão, “Development of a multi-purpose portable electrical UAV system, fixed & rotative wing,” in 2011 Aerosp. Conf., IEEE, 2011, pp. 1–9. [Google Scholar]
115. T. Lee, M. Leok, and N. H. McClamroch, “Nonlinear robust tracking control of a quadrotor UAV on SE(3),” Asian J. Control, vol. 15, no. 2, pp. 391–408, 2013. doi: 10.1002/asjc.567. [Google Scholar] [CrossRef]
116. M. Thammawichai, S. P. Baliyarasimhuni, E. C. Kerrigan, J. B. Sousa, “Optimizing communication and computation for multi-UAV information gathering applications,” IEEE Trans. Aerosp. Electron. Syst., vol. 54, no. 2, pp. 601–615, 2017. doi: 10.1109/TAES.2017.2761139. [Google Scholar] [CrossRef]
117. N. Hu et al., “Building agile and resilient UAV networks based on SDN and blockchain,” IEEE Netw., vol. 35, no. 1, pp. 57–63, 2021. doi: 10.1109/MNET.011.2000176. [Google Scholar] [CrossRef]
118. J. F. Keane and S. S. Carr, “A brief history of early unmanned aircraft,” Johns Hopkins APL Tech. Dig., vol. 32, no. 3, pp. 558–571, 2013. [Google Scholar]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools