
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Using Improved Particle Swarm Optimization Algorithm for Location Problem of Drone Logistics Hub
School of Mathematics and Computer Sciences, Nanchang University, Nanchang, 330031, China
* Corresponding Author: Gang Xu. Email:
(This article belongs to the Special Issue: Intelligent Computing Techniques and Their Real Life Applications)
Computers, Materials & Continua 2024, 78(1), 935-957. https://doi.org/10.32604/cmc.2023.046006
Received 14 September 2023; Accepted 22 November 2023; Issue published 30 January 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Drone logistics is a novel method of distribution that will become prevalent. The advantageous location of the logistics hub enables quicker customer deliveries and lower fuel consumption, resulting in cost savings for the company’s transportation operations. Logistics firms must discern the ideal location for establishing a logistics hub, which is challenging due to the simplicity of existing models and the intricate delivery factors. To simulate the drone logistics environment, this study presents a new mathematical model. The model not only retains the aspects of the current models, but also considers the degree of transportation difficulty from the logistics hub to the village, the capacity of drones for transportation, and the distribution of logistics hub locations. Moreover, this paper proposes an improved particle swarm optimization (PSO) algorithm which is a diversity-based hybrid PSO (DHPSO) algorithm to solve this model. In DHPSO, the Gaussian random walk can enhance global search in the model space, while the bubble-net attacking strategy can speed convergence. Besides, Archimedes spiral strategy is employed to overcome the local optima trap in the model and improve the exploitation of the algorithm. DHPSO maintains a balance between exploration and exploitation while better defining the distribution of logistics hub locations Numerical experiments show that the newly proposed model always achieves better locations than the current model. Comparing DHPSO with other state-of-the-art intelligent algorithms, the efficiency of the scheme can be improved by 42.58%. This means that logistics companies can reduce distribution costs and consumers can enjoy a more enjoyable shopping experience by using DHPSO’s location selection. All the results show the location of the drone logistics hub is solved by DHPSO effectively.Keywords
With the rapid development of e-commerce and the increasing popularity of the Internet, more people are opting for online shopping, including those in urban and rural areas. Products purchased on Websites are typically shipped from suppliers and then transported to customers through logistics hubs [1]. As a vital link between suppliers and customers, logistics hubs play a crucial role in the supply chain [2].
To provide consumers with high-quality service, logistics companies typically either deliver the goods directly to the customer’s home or leave them at a designated location. The final step in delivery, referred to as the “last mile” by Goodman [3], has stimulated the emergence of drone delivery, which aims to enhance the speed and convenience of service. Furthermore, replacing trucks with drones can significantly reduce logistics costs. Amazon has completed its first drone delivery [4], and other logistics companies are also focusing on researching this area [5]. The establishment of an unmanned aerial vehicle (UAV) [6–9] logistics hub is crucial.
According to the characteristics of the problem, the location can be roughly summarized into p-median problems [10,11], p-center problems [10], and covering problems [12]. The location of the drone logistics hub is affected by many factors, such as the order volume, the distribution distance, and the necessary degree of distribution. The location problem has been studied by many scholars as shown in Fig. 1. Feng et al. [13] proposed a mathematical model for the location selection of emergency supply repositories in emergency logistics management. Bendík [11] addressed the problem of the public service system under the p-median model. Astorquiza et al. [14] reviewed the discrete facility location problems. Aardal et al. [15] studied the single-sink capacitated k-facility location problem. When various models are proposed for location problems, the variable weighted algorithm [13], approximation algorithm [16], and evolutionary algorithm [17] are used to obtain appropriate locations. Additionally, intelligent optimization algorithms can solve problems without exploiting the mathematical properties of the problem. Pan et al. [18] attempted to solve this by using an improved Compact Cuckoo Search algorithm, but did not improve the local search capability [19].
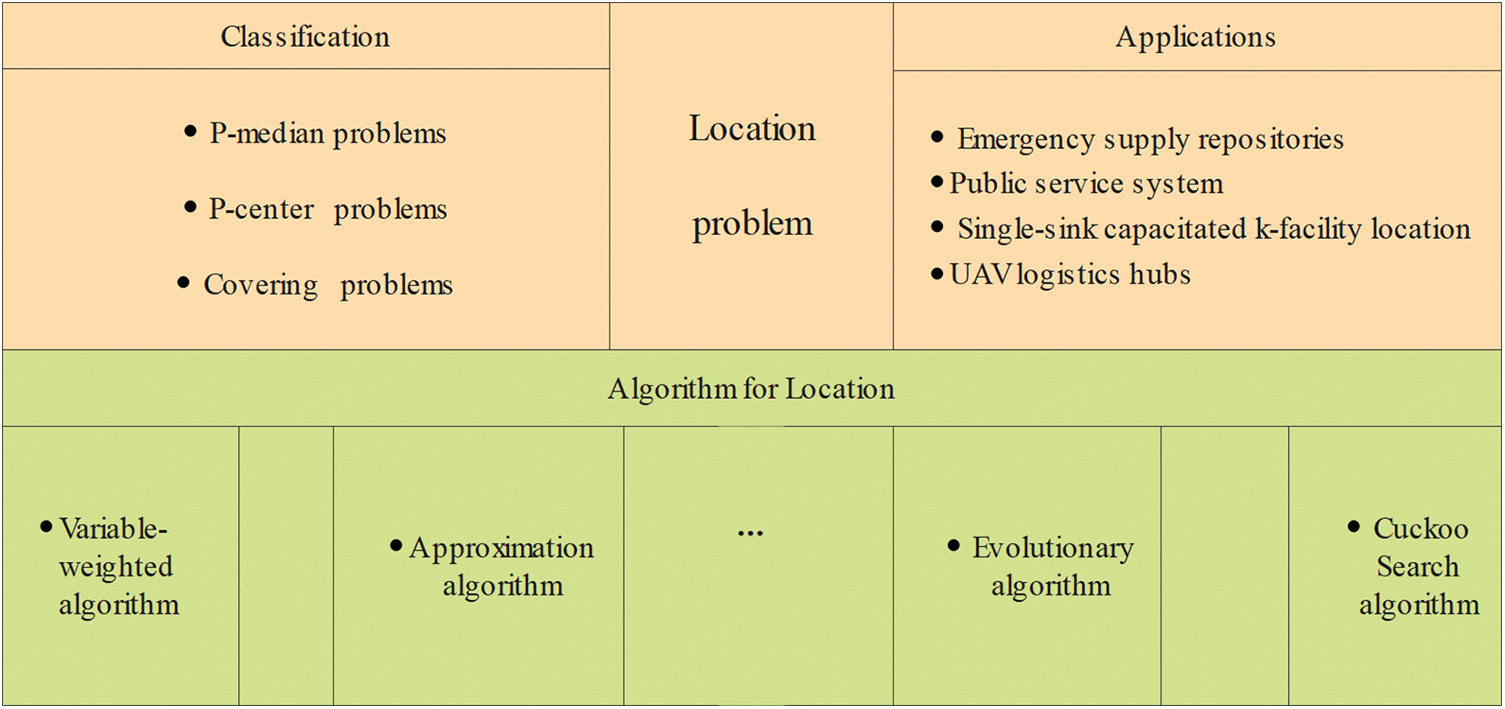
Figure 1: Related research on location problems
The rapid development of the logistics industry [20] will lead to the establishment of many new logistics hubs. It is necessary to study the location selection of logistics hubs. Moreover, a good program can bring not only economic benefits but also convenience. However, deciding where to locate logistics hubs is challenging. The logistics landscape is complex, and current models may be simple and inaccurate. We aim to develop an enhanced mathematical model to identify optimal locations for establishing logistic hubs. In this paper, we build a location selection model that better fits the logistics environment, and give algorithms that can provide optimal location selection solutions. The primary contributions of this paper are as follows:
• Based on other models, a new mathematical model is proposed that considers the degree of transportation difficulty from the logistics hub to the village, the capacity of drones for transportation, and logistics hub location distribution. The model can determine a specific number of best locations within a given area without the need for pre-determined candidate locations.
• To solve the location problem, this paper proposes an improved particle swarm optimization algorithm, named diversity-based hybrid PSO algorithm (DHPSO). The exploration and exploitation of the DHPSO algorithm during the iterative process is seen as a continuous expansion and contraction of the heart. By adjusting the search strategies to the changing diversity of the population, DHPSO has more efficient global and local search and can provide high-quality locations for the problem.
• Comparing the newly proposed model with the existing model, the experiment proves that the new model is more competitive. Moreover, by comparing the results of other state-of-the-art algorithms and DHPSO, DHPSO can provide more efficient schemes.
The remaining parts of this paper are organized as follows: Section 2 (Literature Review) introduces the facility location problem and the particle swarm optimization algorithm. Section 3 (Model Formulation) mainly explains the mathematical model of the location problem. An improved particle swarm optimization algorithm named DHPSO is presented in detail in Section 4 (Solution Approach). Section 5 (Results and Discussion) is the experimental results and performance analysis. Finally, the study’s conclusion is briefly summarized in Section 6 (Conclusions and Future Works).
The facility location problem is a multi-Weber problem [21], which includes not only the user’s allocation but also the positioning of space facilities. The facility location can be converted into mathematical expressions based on plane space and discrete space-based facility location. The facility location considering the number of users and facilities, the cost of the facility selected in a certain location, and other factors is a global optimization problem. This problem will become more complicated if the spatial shape of the facility and the demand of users are considered.
When a natural disaster occurs, emergency facilities need to be established at an appropriate location as soon as possible. The problems of prepositioning relief supplies, locating medical facilities, and building critical infrastructures have been focused on by many scholars. Liu et al. [22] studied the location of multiple-level marine emergency material reserves, and an improved bat algorithm was used to solve the model for saving economic costs and improving emergency rescue efficiency. Feng et al. [13] determined the location of emergency supplies repositories for emergency logistics management by using a variable-weighted algorithm. Scott et al. [23] proposed two models related to the design of the UAV medical service network to address the location decisions, which can promote more efficient emergency medical delivery to save more lives. Wang et al. [24] studied the location selection of parcel lockers under uncertain demands and gained a highly robust solution. Pan et al. [18] studied the location of UAV logistics hubs in rural areas, which reduced the cost of logistics and accelerated the mass application of UAV logistics. In solving complex optimization problems, some traditional optimization methods cannot timely give solutions, or even cannot solve them, the proposal of swarm intelligent optimization algorithms provides a new method for solving complex models. Moreover, a good swarm intelligent optimization algorithm can get more accurate solutions. Eberhart et al. proposed the particle swarm optimization algorithm (PSO) [25,26] which is a swarm intelligent optimization algorithm inspired by the natural behavior of foraging. In this process, individuals feedback their information to other individuals to realize information sharing, and finally find rich food sources. PSO has superior global search ability, but it is easy to lose population diversity and lead to premature convergence in the process of iteration. To deal with this problem, many related PSO variants are proposed through the following three main types approximately [27]: parameters adjustment [28], learning strategy [29], and hybrid with other algorithms [30,31].
1) The algorithm’s performance is affected by three parameters: the inertial weight coefficient, the self-learning ability coefficient, and the social learning coefficient. The influences of the upper and lower bounds of these coefficients on the algorithm [32] are discussed. Furthermore, the process of changing the parameters is proposed, including chaotic dynamic adjustment [33], linear adjustment [26] and nonlinear adjustment [34]. The adjustment of these parameters helps the exploration and exploitation of the algorithm.
2) The particle swarm algorithm selects elite particles based on fitness. Various neighborhood topology methods are proposed based on fitness distance correlation techniques, such as the random neighborhood topology [35], the ring neighborhood topology [36], and the cellular neighborhood topology [37]. The learning exemplars selected from different neighborhood topologies are different, which can maintain population diversity. Xu et al. [38] chose elite particles through an alternate criterion, which proves effective in sustaining population diversity. An opposition-based learning strategy is used to initialize the population and improve the convergence rate [39], and the Levy flight strategy is a great help to the exploration stage [40]. The comprehensive learning PSO was proposed to improve the global search ability [41].
3) Because all algorithms have their respective advantages, hybrids with other algorithms may have better results. Utama et al. [42] proposed combining the butterfly optimization algorithm with the tabu search (TS) algorithm and a local search strategy. The hybrid algorithm, known as BOA, can significantly reduce the total distribution cost. Chegini et al. [43] improved the exploration and exploitation capability by hybrid PSO based on the Sine Cosine algorithm. Senel et al. [44] proposed to combine the grey wolf optimization algorithm with PSO. A modified binary grey wolf optimizer based on stochastic fractal search is proposed to identify the main features for achieving the balance of exploration and exploitation.
To improve the performance of PSO in solving location issues, the particle swarm optimization is improved in this paper. The novelties of DHPSO are as follows: (1) The Gaussian random-walk strategy [45] is used to improve the global search. (2) The bubble-net attacking strategy [46] is employed to speed up convergence. (3) Archimedes spiral strategy [47] is used to overcome premature convergence. (4) The strategies can be adaptively adjusted based on the changes in population diversity.
In traditional logistics, delivery personnel are required to operate a vehicle to complete the last-mile delivery. However, the delivery process becomes increasingly challenging due to the complexity of rural roads, winding paths, and poor road conditions, particularly in harsh weather conditions. Accomplishing this task often requires a substantial amount of manpower, material resources, and financial resources. Moreover, due to the rough terrain, delivery personnel require specialized technical skills. The assurance of a courier’s safety is challenging. Furthermore, efficient service provision demands timely delivery of small batches of goods.
With the development of science and technology, a new delivery method has arisen: Unmanned Aerial Vehicle (UAV) delivery. In comparison with the courier who drives the vehicle over the mountains to complete the delivery, drone delivery merely requires the courier to operate the drone at the logistics hub. On the one hand, drone delivery eliminates the uncertainty of road conditions and thus ensures that deliveries are not affected by unexpected emergencies. On the other hand, it also reduces energy consumption and thus lowers distribution costs. Additionally, UAV transportation is more environmentally friendly compared to vehicle exhaust emissions. Especially in the COVID-19 environment [48], drone delivery significantly reduces human contact.
This study models the intricate environment of UAV logistics. Specifically, the model considers the degree of transportation difficulty from the logistics hub to the village, the transportation capacity of drones and the distribution of the logistics hub locations. Besides, factors such as the distance from the village to its logistics hub, the rural population, etc., are also considered in the model.
The decision variable
The packages in a village are delivered by only a single drone logistics hub as follows:
Considering the different geographic environments of each village, there may be varying difficulties in completing deliveries. Fig. 2 compares the drone and truck delivery paths. The relative traffic difficulty coefficient is defined for each village according to the distance by drone and distance by truck as follows:
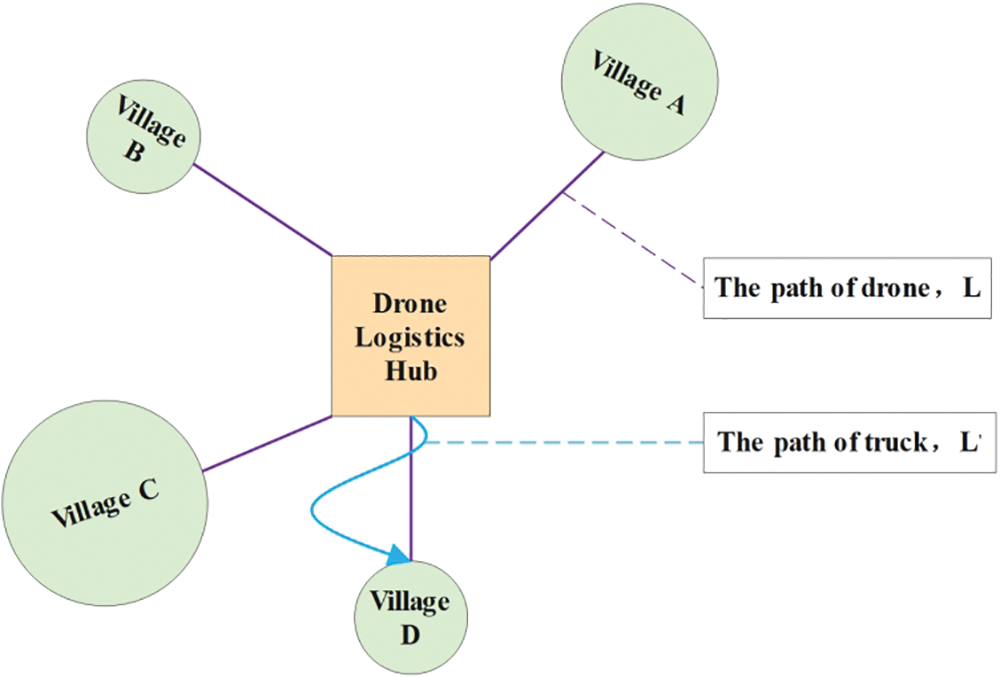
Figure 2: Drone and truck transport routes
where
The range of drones’ flying distance is limited. Efficient delivery can be made within this range. However, the cost of delivery drastically increases beyond this range. Thus, villages should be located within the service range of a drone logistics hub. It could be unsafe if a drone lands in a crowded area. Therefore, a drone logistics hub should be situated a certain distance away from the village as follows:
Meanwhile, the drone should be landed near the village. The flight path
The constraint about
The delivery capacity of drones is limited. When there is a large number of packages in a certain village, the drones need to be delivered multiple times, as reflected by the following formula:
where
Building a drone logistics hub entails significant capital expenditures, and it must be ensured that each hub fulfills a minimum number of package deliveries to prevent it from creating a financial shortfall for the firm. Therefore, the aggregate delivery capacity of the logistics hub should exceed the minimum delivery capacity as follows:
For the distribution of the logistics hub locations, considering the potential impact of densely located drone logistics hubs on drone transportation and flight, it is recommended that these hubs be situated at a suitable distance from each other. The distance between the logistics hub
In [18], Pan et al. established a simple model (model 1) that considers the degree of transportation difficulty, the distance from the village to its logistics hub, and other factors. The objective function of the model 1 is determined as:
In this paper, the new model (model 2) not only retains all the constraints of model 1 but also takes into account factors related to logistics hubs and drones. A penalty function is used to solve various problems [49,50] and an objective function with penalty terms is proposed as follows:
where
where
The use of the penalty function
In the PSO execution process, the search can be divided into two stages: One stage is exploration, where the population disperses to enable the particles to search in a large scope, resulting in a high population diversity. The goal of this stage is to determine the range of the global optimal solution in the decision space. Another stage is exploitation, where the particles narrow their search scope and tend to exploit potential solutions. The diversity will gradually decrease with each iteration. This stage aims to identify the best solution by thoroughly searching through the range of the already determined solutions.
The two stages will alternate during the execution process. The particles’ dispersion during the exploration phase is viewed as the heart's expansion while the aggregation during the exploitation phase is seen as the heart contracting. The search process can be compared to the cycling of the heart, undergoing continuous expansion and contraction. The normal cardiac expansion and contraction can be viewed as a balance between exploration and exploitation, optimizing each stage for maximum accuracy and efficiency of the algorithm. To achieve a better balance between exploration and exploitation, this paper proposes a diversity-based hybrid PSO algorithm (DHPSO) to solve the model established in this paper.
4.2 Particle Swarm Optimization Algorithm
In standard PSO, the particle’s velocity and position are updated with the following equations:
where
4.3 Three Strategies in Diversity-Based Hybrid PSO Algorithm
4.3.1 Gaussian Random-Walk Strategy
Based on random fractals, Salimi [45] proposed stochastic fractal search (SFS). The diffusion property is seen regularly in random fractals, which is suited for search during the exploration phase. SFS leverages this property to effectively search the decision space by enabling particle diffusion search. During the diffusion process, a Gaussian walk is defined as follows:
where
This method is innovative but it only relies on the present global optimal solution to update positions. In other words, personal historical best positions of the particles are not used resulting in the waste of individual cognitive learning information. However, in DHPSO,
where
4.3.2 Bubble-Net Attacking Strategy
Mirjalili et al. [46] used the Bubble-net attacking strategy to simulate the feeding behavior of humpback whales, in which the current global best solution is treated as the prey and other individuals close to the prey. The proposed method has a stable and competitive convergence. However, the parameter design is too complex. In DHPSO, a simplified strategy will be proposed, and the mathematical equations of velocity and position are as follows:
where
4.3.3 Archimedes Spiral Strategy
Archimedes solved the problem of squaring the circle through the properties of the Archimedean Spiral [47]. The mathematical equation for the Archimedean spiral in the Cartesian coordinate system is as follows:
where
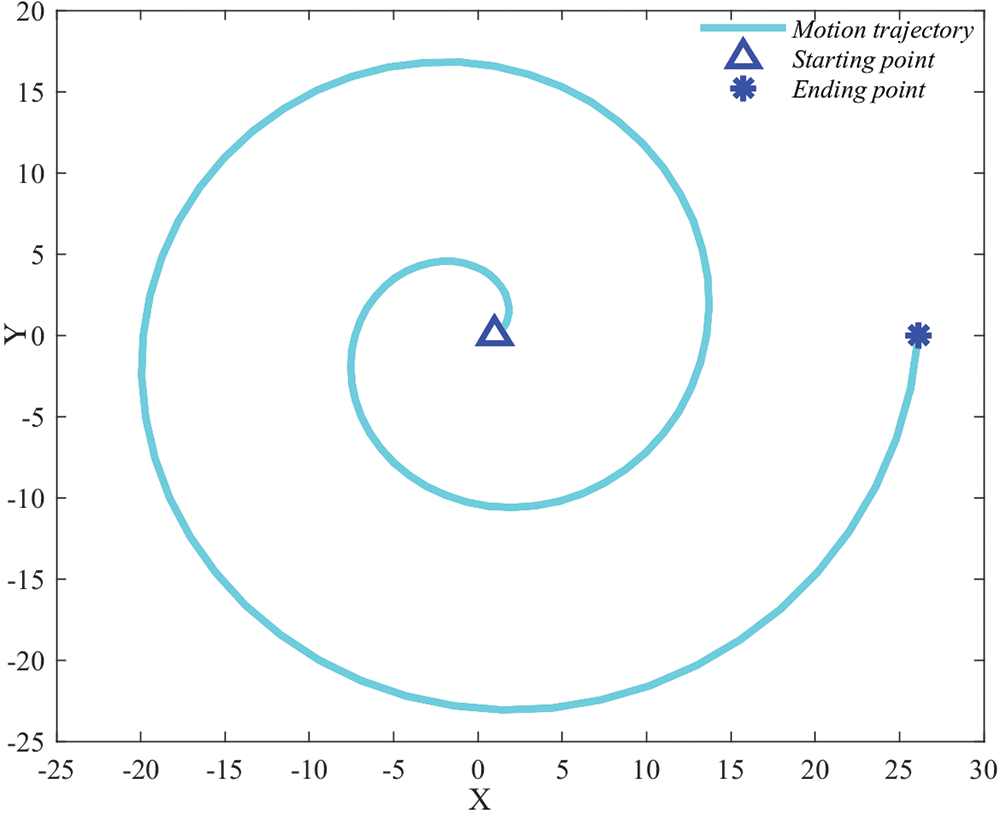
Figure 3: The outward extension of the Archimedes spiral line
The spiral can be seen as a point that begins at a particular point and continuously moves away from that point in Fig. 3. It can also be seen as a process in which a particle spreads out to move away from a particular point. Nijaguna et al. [51] used the Archimedes spiral for a spiral search of the best solutions aiding in overcoming the local optima trap to increase exploitation.
According to its unique features, it is a good way to combine Archimedean spiral strategy with PSO. When the particles fall into local optima, this strategy can deal with the issue and improve population diversity. The detail of the hybrid strategy is shown as follows:
where
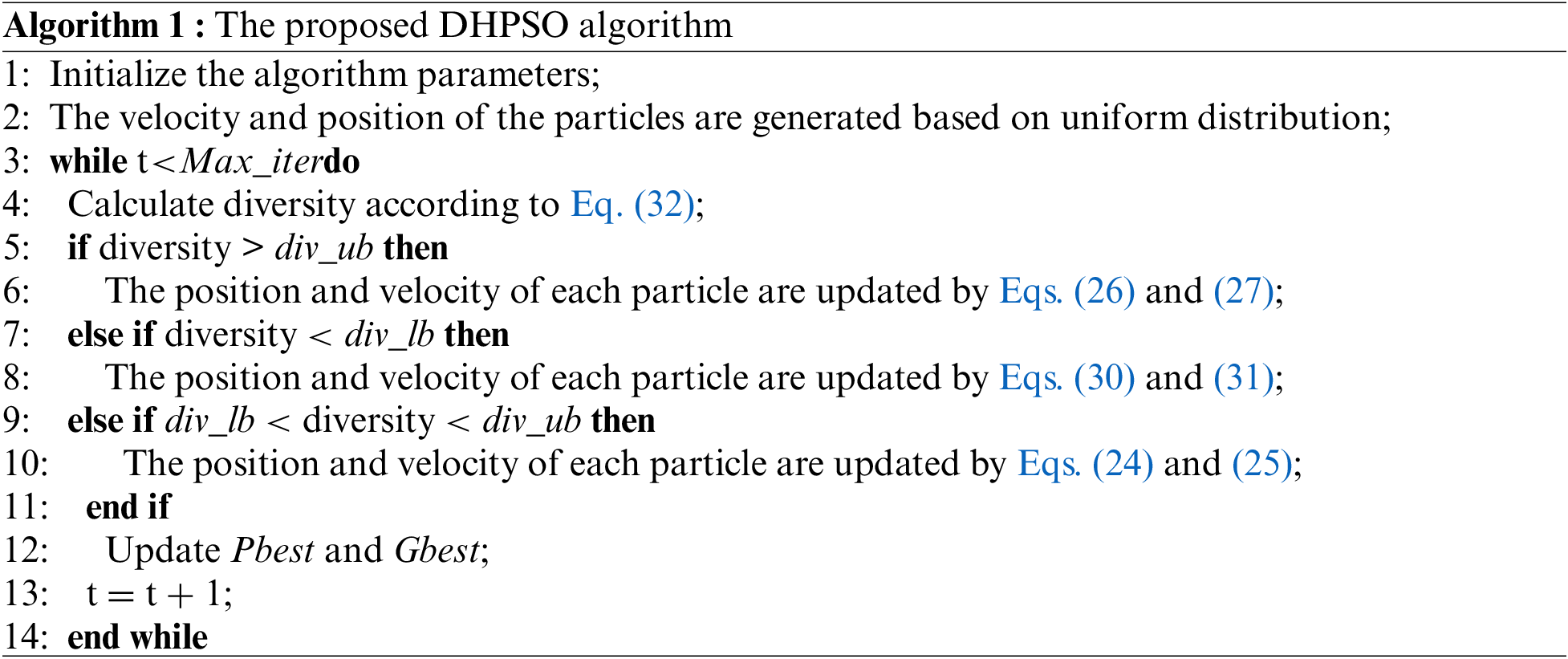
This proposed algorithm adapts the search strategy based on the variation of the population diversity. The pseudo-code for the proposed DHPSO is described in Algorithm 1.
Calculation of population diversity according to Eq. (32) occurs in Algorithm 1,
If the diversity exceeds the upper boundary of the threshold, it means that the particle population has reached a high degree of dispersion, and the Bubble-net attacking strategy starts to run to achieve the effect of convergence.
If the diversity is smaller than the lower bound, which indicates that the population has reached a high level of aggregation, Archimedes spiral strategy is used to diffuse the particles to overcome the local optima trap.
If the diversity is within the upper and lower bounds, the Gaussian random-walk strategy is performed to search the decision space around the particle.
In this study, population diversity is employed as a conversion criterion for exploration and exploitation, and the diversity [52] is defined as follows:
where
It is transformed adaptively when diversity reaches a threshold. As suggested in [52], the upper bound
In Table 1, various experimental parameters in the model are determined as suggested in [18]. Thirty villages are randomly generated within a 2D space measuring 50000 m in length and width in Fig. 4. The blue circle represents the village location, while the circle radius represents the village scope. The coordinates of these villages are shown in Table 2. The demand for the items varies between villages, ranging from 300 to 3000. Drones will stop 200 to 900 m away from the village for delivery.
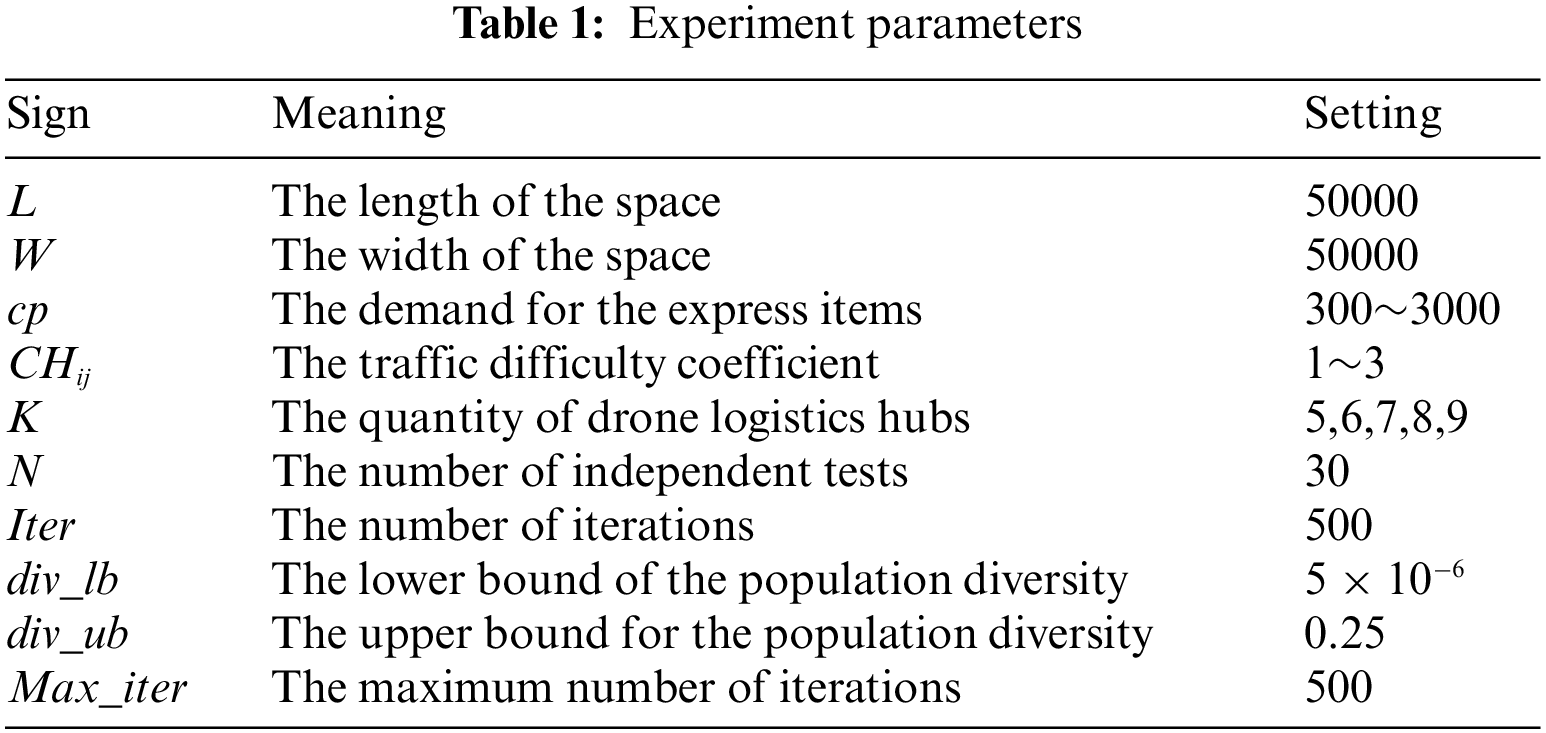
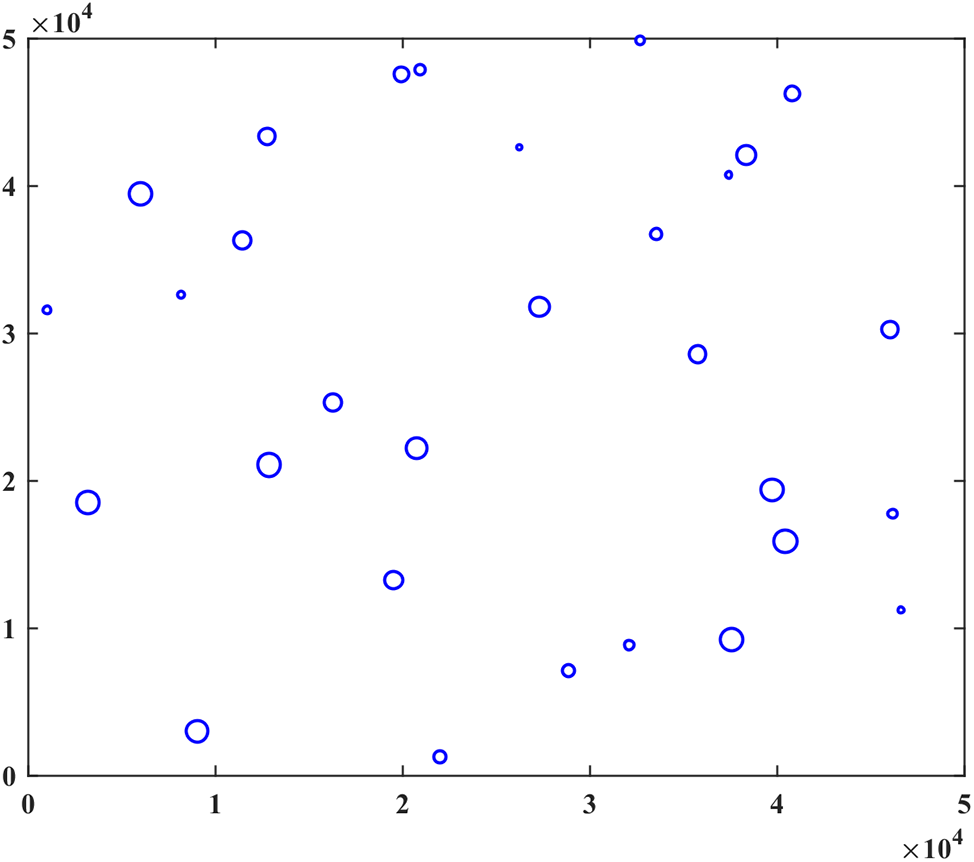
Figure 4: Locations of the villages
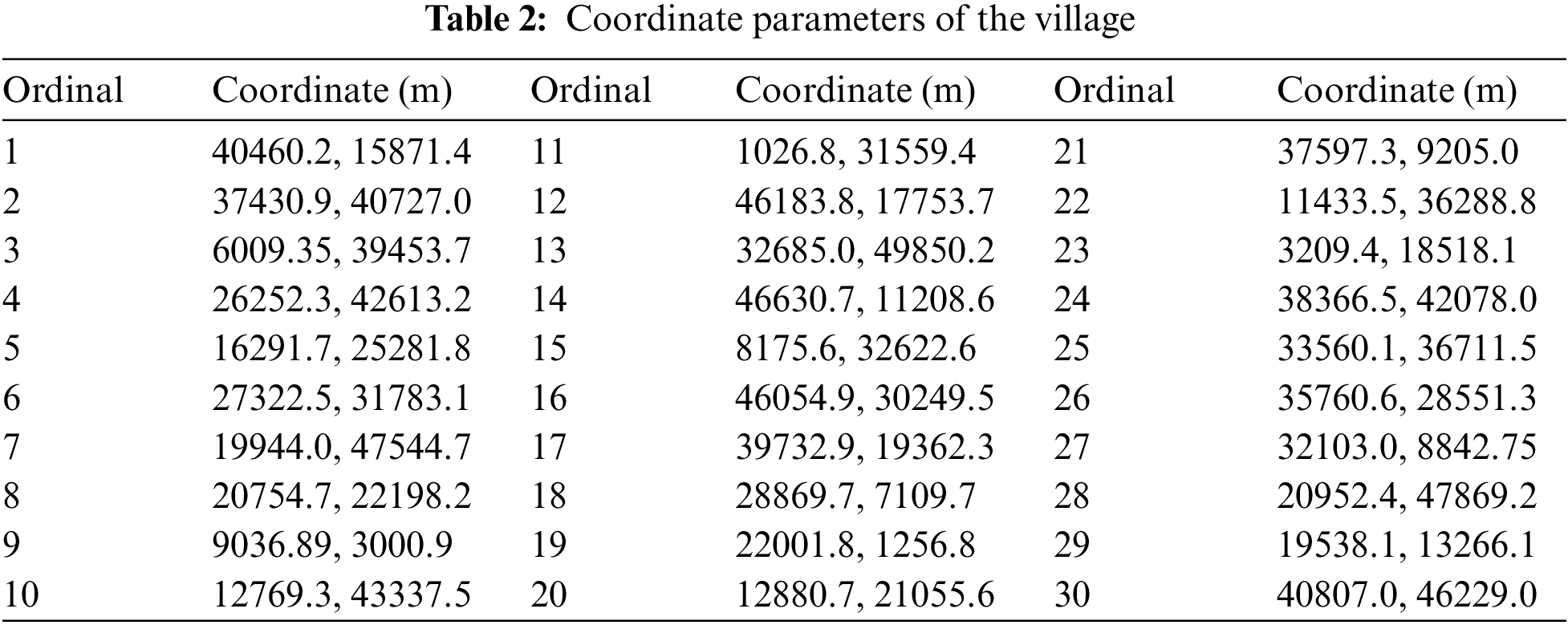
As suggested in [18], the quantity of the UAV logistics hub, referred to as K, is determined based on certain assumptions. K is tested at 5, 6, 7, 8, and 9. Besides, 30 independent tests are conducted with a set number of iterations at 500. The location of the UAV logistics hub and the minimum value of the objective function were recorded. To demonstrate the efficiency of DHPSO for solving location problems, the results of DHPSO are compared with state-of-the-art algorithms in relevant literature such as PSOBOA [53], POA [54], AOA [55], MGO [56], GTO [57], and NGO [58].
5.1.2 Solve the Model by Applying DHPSO
In the DHPSO algorithm, two coordinate matrices
The transportation distance consumption of logistics hubs completing delivery to various villages is described as a matrix
where
Besides, DHPSO selects the minimum value of each row in the matrix
By using X, it is very convenient to determine the villages that each logistics hub needs to be responsible for delivery, and at the same time, it is also convenient to calculate the total delivery amount
For the constraint that logistics hubs should not be too close, the application of population diversity
When the logistics hub location is determined to be at the edge of the range, logistics hubs are dispersed, this is not an ideal location plan, as the delivery cost will be huge. At the same time, the population diversity in the algorithm will also change, and the Bubble net attaching strategy, Archimedes spiral strategy, and Gaussian random walk will all adaptively operate to select the best solution.
Suppose that the number of UAV logistics hubs is set to 5, 6, 7, 8 and 9. The algorithms determine the best locations for UAV logistics hubs according to the number of logistics hubs. From Tables 3 and 4, we can see the average results of 30 independent runs for DHPSO, PSOBOA, AOA, MGO, GTO, NGO, and POA. In addition, the Wilcoxon rank-sum test (significance level
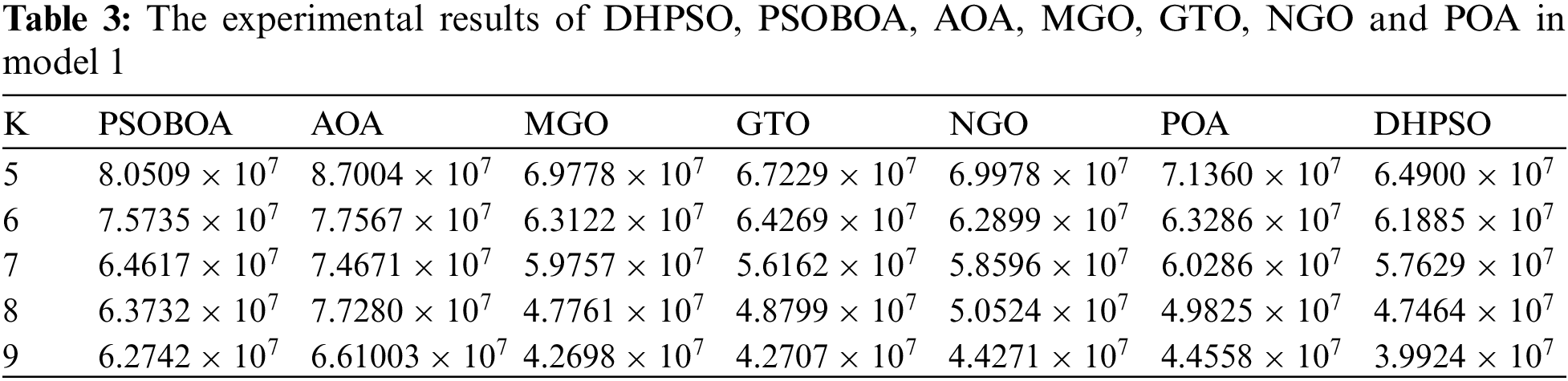
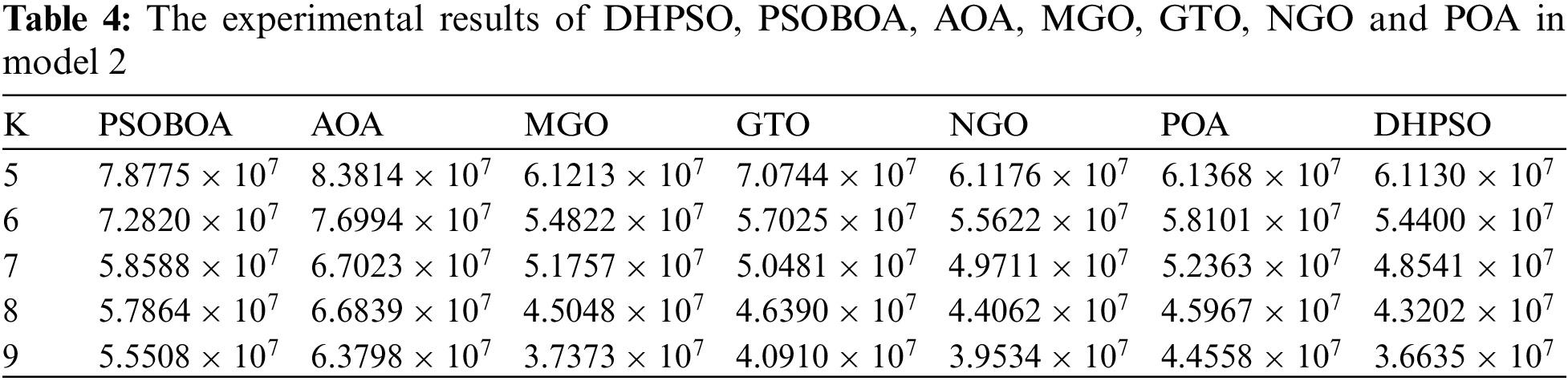

The values obtained from two objective functions (i.e., Eqs. (14) and (15)) are shown in Tables 3 and 4. The biggest difference between the two functions is that the latter has an additional penalty function compared to the former. The penalty functions affect the fitness landscapes of the objective function, which means that the value of the objective function in a certain local range is large. This will be fed back to the algorithm that there will not be the best solution here, and the best solution is probably in the opposite direction. The new objective function provides more effective information for the algorithm to find the best solution. The newly proposed model always achieves better values than the model 1. Model 2 not only retains the aspects of model 1, but also considers the degree of transportation difficulty from the logistics hub to the village, the capacity of drones for transportation, and the distribution of logistics hub locations. In this way, the logistics environment can be better simulated.
From Table 4, the DHPSO algorithm consistently yields the smallest values in the new model. The AOA algorithm always falls into local optima and cannot provide a better solution for the model. The results obtained by MGO and NGO are closest to that of DHPSO, but DHPSO always has better objective function values than MGO and NGO. Moreover, DHPSO is significantly better than both MGO and NGO in Table 5. It shows that DHPSO has the competitiveness to solve the location problem.
From Table 6, the shortened distances achieved by the other algorithms are compared with those of the DHPSO. The effectiveness of the scheme obtained by the DHPSO can be seen in the shortened distance. AOA’s reduced distance is substantial due to its inability to overcome local optima and select rational locations during 30 independent tests. Compared to the results of several other algorithms, the greatest shortened distance is 2.7163 × 107 m. The relative shortened ratio is shown in Table 7 and Fig. 5. This shows the efficacy of the DHPSO-selected scheme, with the maximum rate being 42.58%. Fig. 5 shows that the shortened ratio tends to increase as the number of drone logistic hubs increases.
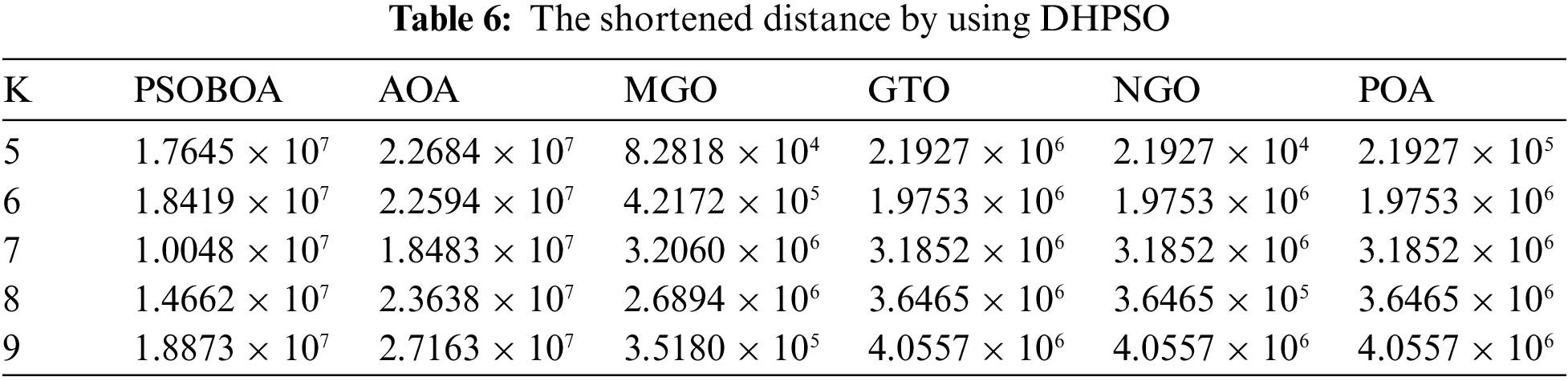
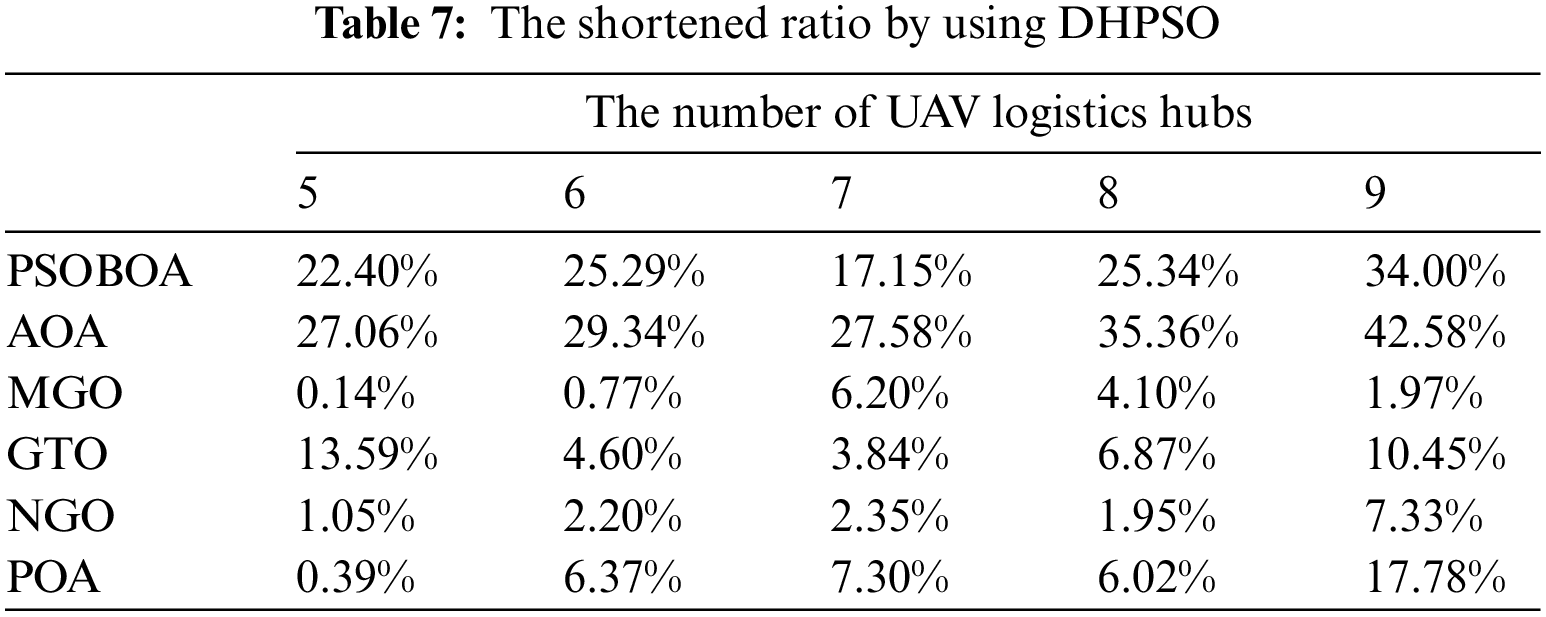
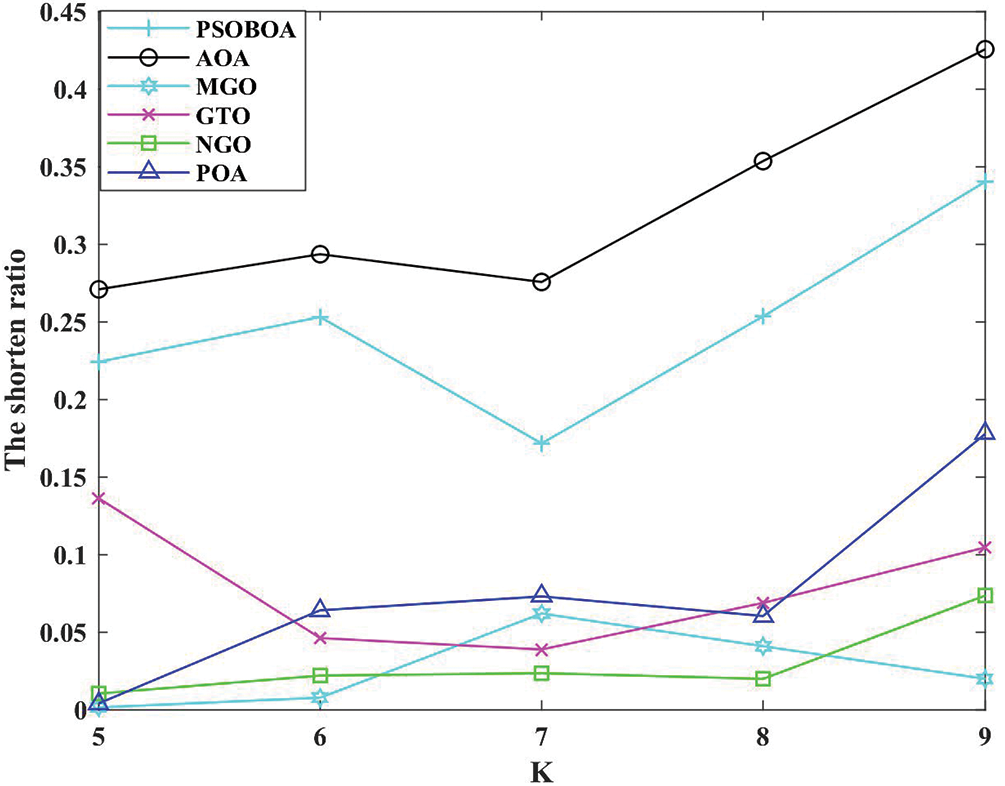
Figure 5: The shortened ratio by comparing to the DHPSO algorithm
Fig. 6 shows the convergence curves. Although AOA converges quickly, it fails to achieve an excellent solution. Similarly, PSOBOA also falls short of reaching an ideal value. NGO, GTO, and MGO converge to a smaller value after 200 iterations, and the solution remains stable in subsequent iterations. Before the 450 iterations, POA always resulted in a smaller solution than DHPSO. However, DHPSO obtained a better location plan during the last 50 iterations. This is because the diversity in the DHPSO algorithm is constantly evolving, and the strategies employed are also adapting accordingly. This is also why the objective function value obtained by DHPSO always decreases during its iteration and does not tend to a stable value. In contrast, DHPSO consistently delivers better location options.
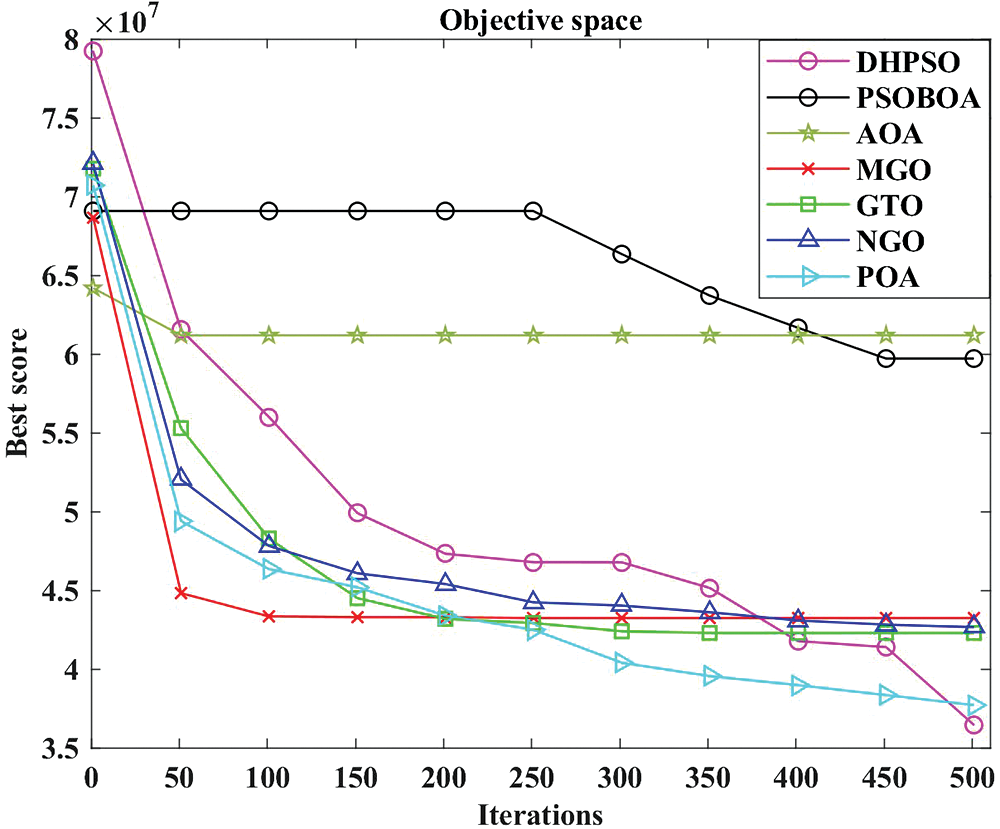
Figure 6: The convergence curves of drone logistics hub location problem under different algorithms
The experimental results reveal the locations of the drone logistics hub under various conditions, with the precise coordinates of the logistics hubs listed in Table 8. Fig. 7 illustrates the determined locations of the UAV logistics hub, in which the triangle denotes the drone logistics hub, and the circle symbolizes the village. In Fig. 7, it is evident that with fewer logistics hub stations, the delivery distance increases, leading to elevated costs. As the number of logistics stations increases, long-distance delivery no longer exists, which also makes the objective function value smaller. It is more effective to determine the number and location of logistic hubs based on the distribution and demand of villages.
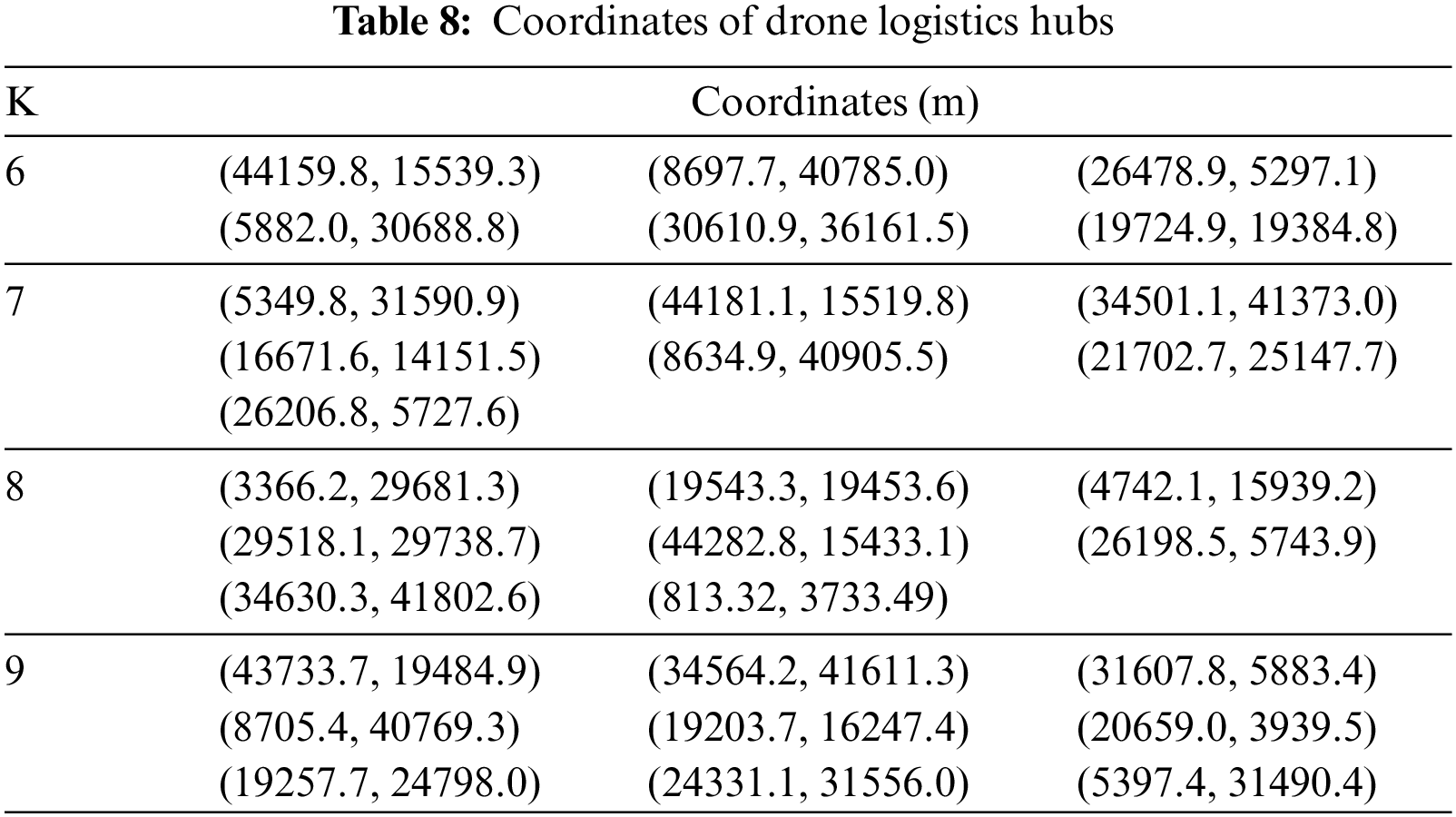
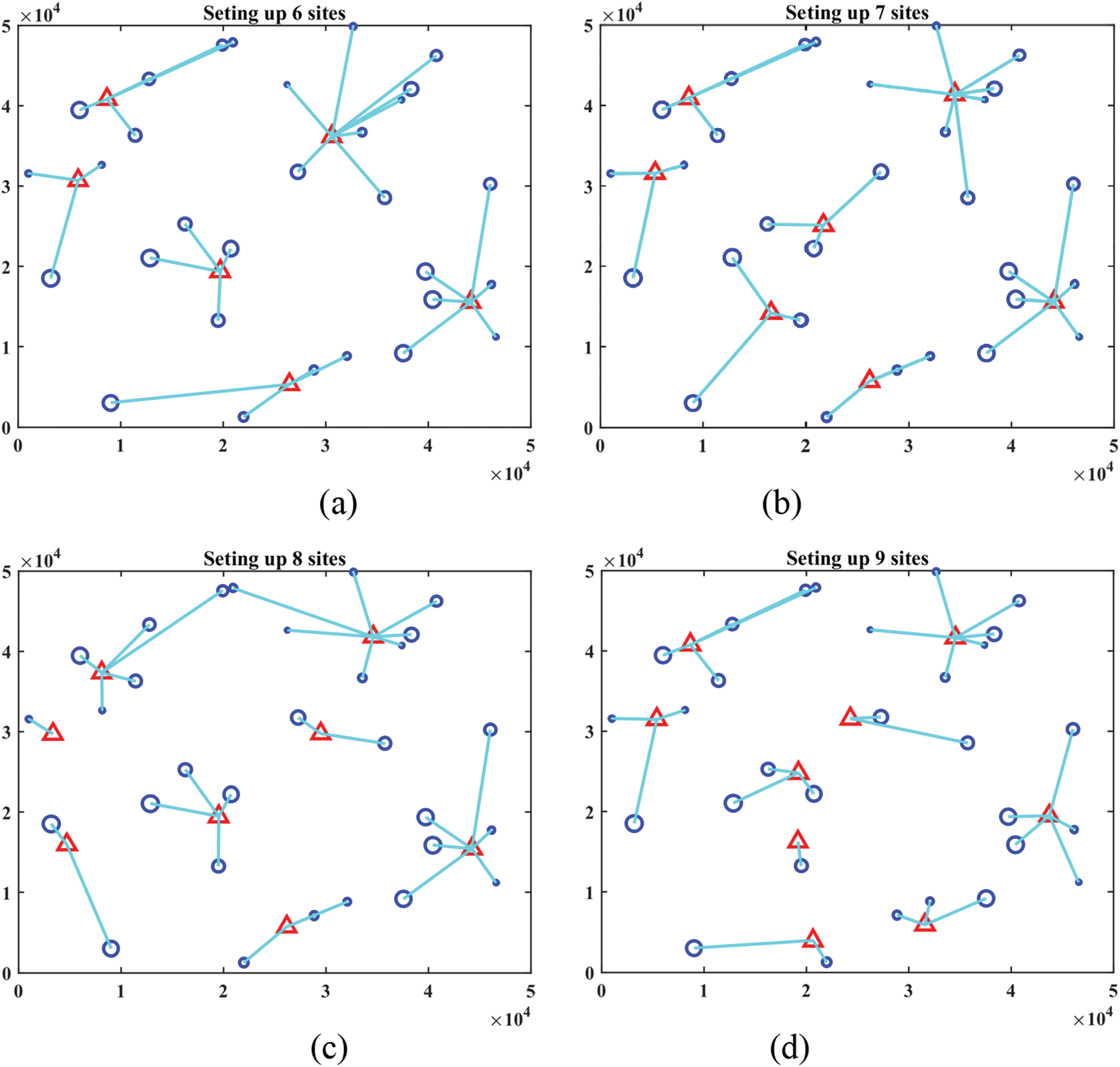
Figure 7: Distribution of drone logistics hub and village under DHPSO. (a–d) respectively represent the location distribution of the number of UAV logistics hubs at 6, 7, 8 and 9
5.2 Analysis of the Results and Discussion
The drone logistics hub locations may vary by using different algorithms, leading to the different total cost of the delivery. To maintain the integrity of drone logistics environment, this paper establishes a new model that takes more factors into account to solve the site selection problem. Comparing the results (as Tables 3 and 4) of the new and previous models for solving the location problem, it is shown that the transportation cost in the new model is consistently lower than that in the previous model. The best solution for DHPSO in the previous model is 3.9924 × 107, whereas the best solution for the new model is 3.6635 × 107 due to relocating the logistic hubs, resulting in reduced logistic costs. This shows that the new model is more conducive to selecting the appropriate logistics hub location. To assess the feasibility of DHPSO to resolve this location problem, a range of algorithms were tested through comparative experiments. After analyzing total cost and convergence curve, DHPSO solution was considered feasible.
The DHPSO proposed in this paper demonstrates excellent performance in solving the location of drone logistics hubs. In Table 4, DHPSO obtains the optimal outcomes of all experiments, with minimum objective function values of 6.1130 × 107, 5.4400 × 107, 4.8541 × 107, 4.3202 × 107, and 3.6635 × 107 m, respectively, for different quantities of drone logistics hubs. In Table 6, it is demonstrated that the DHPSO's chosen scheme is at least 2.1927 × 104 m shorter compared to the other algorithms, and the maximum efficiency improvement rate of the scheme reaches 42.58% in Table 7. The results show that DHPSO can reach shorter distances than the other algorithms, which include PSOBOA, AOA, MGO, GTO, NGO, and POA. DHPSO uses a hybrid search strategy that is diversity-based, which improves its optimizing capabilities compared to other hybrid PSO (i.e., PSOBOA). The results of the experiment indicate that DHPSO performs better than PSOBOA. It also shows that the three strategies in DHPSO can maintain the population diversity better. The use of these strategies enhances the PSO algorithm’s search capability. In addition, compared with state-of-the-art algorithms (i.e., AOA, MGO, GTO, NGO and POA), DHPSO consistently provides better location solutions.
The shortened delivery distance results in lower transportation costs, reduced energy consumption, and increased revenue for logistics companies. Moreover, customers receive their goods quickly, resulting in greater customer attraction. Thus, DHPSO can be used to identify a more optimal location for drone logistics hubs.
Additionally, the algorithm’s convergence affects the choice of location. Fig. 6 shows that DHPSO has good performance in convergence efficiency. Although DHPSO does not achieve the fastest convergence rate among other algorithms at the beginning of the iteration, it has a better convergence value towards the end of the iteration. DHPSO can jump out of local optima, ensuring that it can make the best location plan. The solution to the drone logistics hub location problem with DHPSO therefore presents more options for decision-makers.
6 Conclusions and Future Works
The location problem of drone logistics hub is an optimization problem and the PSO algorithm is an efficient optimization algorithm. This paper presents a more realistic mathematical model for choosing the drone logistics hub locations, where the constraints are more exhaustive. The model incorporates current model aspects while also accounting for factors like the level of transportation difficulty between logistics hubs and the village, drone transportation capacity, and logistics hub distribution. Besides, it is reasonable to set the objective function by adding penalty functions to simulate the delivery.
To solve this model, an improved particle swarm optimization algorithm named DHPSO is proposed. Multiple strategies are adaptively selected to execute according to the changes in population diversity. The proposed algorithm can keep a better balance between exploration and exploitation. The diversity is also applied to the location selection of drone logistics hubs to avoid densely established hubs. The penalty function not only makes the location better meet the constraints of the model, but also changes the fitness landscape of the objective function, providing optimization direction for the algorithm. The performance of DHPSO is compared with some recently developed intelligent algorithms on the model. The results show that the proposed algorithm can provide a more effective location selection. The location of the logistics hub is determined, and which logistics hub is responsible for delivering a village is also identified through a straight line.
The model simulates village, logistics hub, and drone constraints for added realism, and the proposed algorithm can provide perfect locations for establishing logistics hubs. This means that decision makers will have more options and logistics companies will be able to decrease delivery costs. Moreover, consumers will benefit from increased convenience, leading to more choosing the logistics company and creating a virtuous cycle.
However, the current research in this paper has some shortcomings. For example, the DHPSO’s convergence efficiency during early iterations, leads to unsatisfactory application performance in certain emergencies where rapid solutions are necessary. How to improve the convergence speed of DHPSO in the early stage of iteration will also be our focus in the future. Besides, we will also establish a multi-objective mathematical model to further examine the location problem of drone logistics hubs.
Acknowledgement: I would like to thank Dr. G. Xu for his guidance on this research and would also like to thank the reviewers for the very professional comments.
Funding Statement: This work is supported by the National Natural Science Foundation of China (No. 61866023).
Author Contributions: Study conception and design: G. Xu, L. Zheng; data collection: L. Zheng; analysis and interpretation of results: L. Zheng, W. Chen; draft manuscript preparation: L. Zheng. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data used to support the findings of this study are available from the corresponding author upon request.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. A. Ceselli, G. Righini and E. Tresoldi, “Combined location and routing problems for drug distribution,” Discrete Applied Mathematics, vol. 165, pp. 30–145, 2014. [Google Scholar]
2. I. Karaoglan and F. Altiparmak, “Memetic algorithm for the capacitated location routing problem with mixed backhauls,” Computers & Operations Research, vol. 55, pp. 200–216, 2015. [Google Scholar]
3. Z. Ouyang, E. Leung and G. Huang, “Community logistics and dynamic community partitioning: A new approach for solving e-commerce last mile delivery,” European Journal of Operational Research, vol. 307, no. 1, pp. 140–156, 2023. [Google Scholar]
4. K. Dorling, J. Heinrichs, G. Messier and S. Magierowski, “Vehicle routing problems for drone delivery,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 47, no. 1, pp. 70–85, 2017. [Google Scholar]
5. C. C. Murray and A. G. Chu, “The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery,” Transportation Research Part C: Emerging. Technologies, vol. 54, pp. 86–109, 2015. [Google Scholar]
6. H. A. Mengash, H. Alqahtani, M. Maray, M. K. Nour, R. Marzouk et al., “Coati optimization-based energy efficient routing protocol for unmanned aerial vehicle communication,” Computers, Materials & Continua, vol. 75, no. 3, pp. 4805–4820, 2023. [Google Scholar]
7. H. Nawaz, H. M.Ali and A. A. Laghari, “UAV communication networks issues: A review,” Archives of Computational Methods in Engineering, vol. 28, pp. 1349–1369, 2021. [Google Scholar]
8. J. Shi, H. Mao, Z. Zhou and L. Zheng, “Adaptive large neighborhood search algorithm for the Unmanned aerial vehicle routing problem with recharging,” Applied Soft Computing, vol. 147, pp. 110831, 2023. [Google Scholar]
9. X. Yu, C. Li and G. G. Yen, “A knee-guided differential evolution algorithm for unmanned aerial vehicle path planning in disaster management,” Applied Soft Computing, vol. 98, pp. 106857, 2021. [Google Scholar]
10. C. T. Barbaros, L. F. Richard and J. L. Timothy, “Location on networks: A survey. Part I: The p-center and p-median problems,” Management Science, vol. 29, pp. 482–497, 1983. [Google Scholar]
11. J. Bendík, “Selection of minimal set of locations in the public service system design,” in 2015 IEEE 13th Int. Scientific Conf. on Informatics, Poprad, Slovakia, pp. 47–51, 2015. [Google Scholar]
12. O. Berman, J. Kalcsics and D. Krass, “On covering location problems on networks with edge demand,” Computers Operations Research, vol. 74, pp. 214–227, 2016. [Google Scholar]
13. J. R. Feng, W. M. Gai, J. Y. Li and M. Xu, “Location selection of emergency supplies repositories for emergency logistics management: A variable weighted algorithm,” Journal of Loss Prevention in the Process Industries, vol. 63, pp. 104032, 2020. [Google Scholar]
14. C. Astorquiza, I. Contreras and G. Laporte, “Multi-level facility location problems,” European Journal of Operational Research, vol. 267, no. 3, pp. 791–805, 2018. [Google Scholar]
15. K. Aardal, P. L. Berg, D. Gijswijt and S. Li, “Approximation algorithms for hard capacitated k-facility location problems,” European Journal of Operational Research, vol. 242, no. 2, pp. 358–368, 2015. [Google Scholar]
16. L. Han, D. Xu, Y. Xu and D. Zhang, “Approximation algorithm for the squared metric soft capacitated facility location problem,” in Proc. of the 8th Int. Conf. on Computational Data and Social Networks, Ho Chi Minh City, Vietnam, pp. 72–73, 2019. [Google Scholar]
17. J. Sun, “An endosymbiotic evolutionary algorithm for the hub location-routing problem,” Mathematical Problems in Engineering, vol. 2015, pp. 525980, 2015. [Google Scholar]
18. J. Pan, P. Song, S. Chu and Y. Peng, “Improved compact cuckoo search algorithm applied to location of drone logistics hub,” Mathematics, vol. 8, no. 3, pp. 333, 2020. [Google Scholar]
19. X. Ou, M. Wu, Y. Pu, B. Tu, G. Zhang et al., “Cuckoo search algorithm with fuzzy logic and Gauss-Cauchy for minimizing localization error of WSN,” Applied Soft Computing, vol. 125, pp. 109211, 2022. [Google Scholar]
20. Y. Zhang, C. Li and X. Xin, “Stackelberg game-based resource allocation with blockchain for cold-chain logistics system,” Computers, Materials & Continua, vol. 75, no. 2, pp. 2429–2442, 2023. [Google Scholar]
21. I. K. Alttfytfnel, E. Durmaz, N. Aras and K. Özktfytfsactfytfk, “A location-allocation heuristic for the capacitated multi-facility Weber problem with probabilistic customer locations,” European Journal of Operational Research, vol. 198, no. 3, pp. 790–799, 2009. [Google Scholar]
22. K. Liu, C. Liu, X. Xiang and Z. Tian, “Testing facility location and dynamic capacity planning for pandemics with demand uncertainty,” European Journal of Operational Research, vol. 304, no. 1, pp. 150–168, 2022. [Google Scholar]
23. J. Scott and C. Scott, “Drone delivery models for healthcare,” in Proc. of the 50th Hawaii Int. Conf. on System Sciences, Hilton Waikoloa Village, HI, USA, pp. 3297–3304, 2017. [Google Scholar]
24. Y. Wang, Y. Zhang, M. Bi, J. Lai and Y. Chen, “A robust optimization method for location selection of parcel lockers under uncertain demands,” Mathematics, vol. 10, no. 22, pp. 4289, 2022. [Google Scholar]
25. J. Kennedy and R. C. Eberhart, “Particle swarm optimization,” in Proc. of the 1995 IEEE Int. Conf. on Neural Networks, Nagoya, Japan, pp. 1942–1948, 1995. [Google Scholar]
26. Y. Shi and R. Eberhart, “A modified particle swarm optimizer,” in IEEE Int. Conf. on Evolutionary Computation Proc., Anchorage, Alaska, pp. 69–73, 1998. [Google Scholar]
27. R. Wang, K. Hao, L. Chen, T. Wang and C. Jiang, “A novel hybrid particle swarm optimization using adaptive strategy,” Information Sciences, vol. 579, pp. 231–250, 2021. [Google Scholar]
28. Y. Shi and R. C. Eberhart, “Empirical study of particle swarm optimization,” Evolutionary Computation, vol. 3, pp. 1945–1950, 1999. [Google Scholar]
29. X. Tao, X. Li, W. Chen, T. Liang, Y. T. Li et al., “Self-adaptive two roles hybrid learning strategies-based particle swarm optimization,” Information Sciences, vol. 578, pp. 457–481, 2021. [Google Scholar]
30. P. Dziwinski and L. Bartczuk, “A new hybrid particle swarm optimization and genetic algorithm method controlled by fuzzy logic,” IEEE Transactions on Fuzzy Systems, vol. 28, no. 6, pp. 1140–1154, 2020. [Google Scholar]
31. M. Y. Shams, E. M. El-Sayed, A. Ibrahim and A. M. Elshewey, “A hybrid dipper throated optimization algorithm and particle swarm optimization (DTPSO) model for hepatocellular carcinoma (HCC) prediction,” Biomedical Signal Processing and Control, vol. 85, pp. 104908, 2023. [Google Scholar]
32. G. Xu, “An adaptive parameter tuning of particle swarm optimization algorithm,” Applied Mathematics and Computation, vol. 219, no. 9, pp. 4560–4569, 2013. [Google Scholar]
33. K. Chen, F. Zhou and A. Liu, “Chaotic dynamic weight particle swarm optimization for numerical function optimization,” Knowledge-Based Systems, vol. 139, pp. 23–40, 2018. [Google Scholar]
34. C. Yang, W. Gao, N. Liu and C. Song, “Low-discrepancy sequence initialized particle swarm optimization algorithm with high-order nonlinear time-varying inertia weight,” Applied Soft Computing, vol. 29, pp. 386–394, 2015. [Google Scholar]
35. H. Peng, C. Deng and Z. Wu, “Best neighbor-guided artificial bee colony algorithm for continuous optimization problems,” Soft Computing, vol. 23, pp. 8723–8740, 2019. [Google Scholar]
36. J. Zou, Q. Deng, J. Zheng and S. Yang, “A close neighbor mobility method using particle swarm optimizer for solving multimodal optimization problems,” Information Sciences, vol. 519, pp. 332–347, 2020. [Google Scholar]
37. Y. Shi, H. Liu, L. Gao and G. Zhang, “Cellular particle swarm optimization,” Information Sciences, vol. 181, no. 20, pp. 4460–4493, 2011. [Google Scholar]
38. Y. L. Xu, Y. Peng, X. Y. Su, Z. L. Yang, C. Y. Ding et al., “Improving teaching learning-based-optimization algorithm by a distance-fitness learning strategy,” Knowledge-Based Systems, vol. 257, pp. 108271, 2022. [Google Scholar]
39. W. Y. Dong, L. Kang and W. S. Zhang, “Opposition-based particle swarm optimization with adaptive mutation strategy,” Soft Computing, vol. 21, no. 17, pp. 5081–5090, 2017. [Google Scholar]
40. H. Hakli and H. Uguz, “A novel particle swarm optimization algorithm with levy flight,” Applied Soft Computing, vol. 23, pp. 333–345, 2014. [Google Scholar]
41. J. J. Liang, A. K. Qin, P. N. Suganthan and S. Baskar, “Comprehensive learning particle swarm optimizer for global optimization of multimodal functions,” IEEE Transactions on Evolutionary Computation, vol. 10, no. 3, pp. 281–295, 2006. [Google Scholar]
42. D. Utama, D. Widodo, M. Ibrahim and S. Dewi, “A new hybrid butterfly optimization algorithm for green vehicle routing problem,” Journal of Advanced Transportation, vol. 2020, pp. 8834502, 2020. [Google Scholar]
43. S. N. Chegini, A. Bagheri and F. Najafi, “PSOSCALF: A new hybrid PSO based on Sine Cosine Algorithm and Levy flight for solving optimization problems,” Applied Soft Computing, vol. 73, pp. 697–726, 2018. [Google Scholar]
44. F. Senel, F. Gokce, A. Yuksel and T. Yigit, “A novel hybrid PSO-GWO algorithm for optimization problems,” Engineering with Computers, vol. 35, pp. 1359–1373, 2019. [Google Scholar]
45. H. Salimi, “Stochastic fractal search: A powerful metaheuristic algorithm,” Knowledge-Based Systems, vol. 75, pp. 1–18, 2015. [Google Scholar]
46. S. Mirjalili and A. Lewis, “The whale optimization algorithm,” Advances in Engineering Software, vol. 95, pp. 51–67, 2016. [Google Scholar]
47. O. Tarkhaneh and I. Moser, “An improved differential evolution algorithm using Archimedean spiral and neighborhood search based mutation approach for cluster analysis,” Future Generation Computer Systems, vol. 101, pp. 921–993, 2019. [Google Scholar]
48. J. Piri, P. Mohapatra, B. Acharya, F. S. Gharehchopogh, V. C. Gerogiannis et al., “Feature selection using artificial gorilla troop optimization for biomedical data: A case analysis with COVID-19 data,” Mathematics, vol. 10, no. 15, pp. 2742, 2022. [Google Scholar]
49. W. Ning, S. Chen, F. Qiang, H. Tang and S. Jie, “A credit card fraud model prediction method based on penalty factor optimization AWTadaboost,” Computers, Materials & Continua, vol. 74, no. 3, pp. 5952–5965, 2023. [Google Scholar]
50. W. Liu, Z. Gu and M. Jin, “Penalty function based detector for generalized space shift keying massive MIMO systems,” IEEE Communications Letters, vol. 20, no. 4, pp. 664–667, 2016. [Google Scholar]
51. G. Nijaguna, J. Babu, B. D. Parameshachari, R. Prado and J. Frnda, “Quantum fruit fly algorithm and ResNet50-VGG16 for medical diagnosis,” Applied Soft Computing, vol. 136, pp. 110055, 2023. [Google Scholar]
52. M. Pant, T. Radha and V. P. Singh, “A simple diversity guided particle swarm optimization,” in Proc. of 2007 IEEE Cong. on Evolutionary Computation, Singapore, pp. 3294–3299, 2007. [Google Scholar]
53. M. Zhang, D. Long, T. Qin and J. Yang, “A chaotic hybrid butterfly optimization algorithm with particle swarm optimization for high-dimensional optimization problems,” Symmetry, vol. 12, no. 11, pp. 1800, 2020. [Google Scholar]
54. T. Pavel and M. Dehghani, “Pelican optimization algorithm: A novel nature-inspired algorithm for engineering applications,” Sensors, vol. 22, no. 3, pp. 855, 2022. [Google Scholar]
55. L. Abualigah, A. Diabat, S. Mirjalili, M. Abd Elaziz and A. H. Gandomi, “The arithmetic optimization algorithm,” Computer Methods in Applied Mechanics and Engineering, vol. 376, pp. 113609, 2021. [Google Scholar]
56. M. Abdollahzadeh, F. S. Gharehchopogh, N. Khodadadi and S. Mirjalili, “Mountain gazelle optimizer: A new nature-inspired metaheuristic algorithm for global optimization problems,” Advances in Engineering Software, vol. 174, pp. 103282, 2022. [Google Scholar]
57. B. Abdollahzadeh, F. S. Gharehchopogh and S. Mirjalili, “Artificial gorilla troops optimizer: A new nature-inspired metaheuristic algorithm for global optimization problems,” International Journal of Intelligent Systems, vol. 36, no. 10, pp. 5887–5958, 2021. [Google Scholar]
58. M. Dehghani, Š. Hubálovský and P. Trojovský, “Northern goshawk optimization: A new swarm-based algorithm for solving optimization problems,” IEEE Access, vol. 9, pp. 162059–162080, 2021. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools