
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
REVIEW
AI-Based UAV Swarms for Monitoring and Disease Identification of Brassica Plants Using Machine Learning: A Review
1 School of Physics and Electronic Engineering, Jiaying University, Meizhou, China
2 Electronic Engineering Department, Sir Syed University of Engineering & Technology, Karachi, Pakistan
3 Software Engineering Department, Sir Syed University of Engineering & Technology, Karachi, Pakistan
4 Department of Science and Engineering, Solent University, Southampton, SO140YN, UK
* Corresponding Author: Zain Anwar Ali. Email:
Computer Systems Science and Engineering 2024, 48(1), 1-34. https://doi.org/10.32604/csse.2023.041866
Received 09 May 2023; Accepted 13 July 2023; Issue published 26 January 2024
 View Full Text
View Full Text Download PDF
Download PDFAbstract
Technological advances in unmanned aerial vehicles (UAVs) pursued by artificial intelligence (AI) are improving remote sensing applications in smart agriculture. These are valuable tools for monitoring and disease identification of plants as they can collect data with no damage and effects on plants. However, their limited carrying and battery capacities restrict their performance in larger areas. Therefore, using multiple UAVs, especially in the form of a swarm is more significant for monitoring larger areas such as crop fields and forests. The diversity of research studies necessitates a literature review for more progress and contribution in the agricultural field. In this review, the comparative analysis of existing literature surveys is explored. This paper aims to provide an overview of AI-based UAV swarms, different cameras and sensors, image processing, and machine learning (ML) algorithms for image analysis having the purpose of monitoring and disease identification. Brassica plants are focused as they are grown on wider scales globally. Brassica species, the commonly infected diseases, and different types of disease detection methods are discussed. Investigations show the significance of using UAV swarms for growth monitoring growth for yield estimation, health monitoring, water status monitoring and irrigation management, nutrition disorders monitoring, pest and disease detection, and pesticide and fertilizer spraying in Brassica plants. Finally, some challenges of swarm-based applications are also addressed that require future consideration. The significance of this paper is that it suggests its readers embrace swarm-based technologies in the pursuit of more efficient production with relevant economic benefits.Keywords
The core of many stable economies is highly dependent on the agricultural sector for sufficient food stocks and its major contribution to a nation’s economy [1]. For example, Brassica plants are grown on wider scales in many countries and have much importance in their agribusiness. This importance can be observed by its huge variety of 37 species such as Chinese cabbage, field mustard, canola or rapeseed, etc., and multiple uses like vegetables, salads, edible oil, condiment crops, remedies for humans, and fodder for animals [2]. Because of their high production in European countries, they are leading producers of vegetable oil and protein meals. Mustard and rape are widely grown after cotton in Pakistan; therefore they contribute a lot to its GDP [3].
Protecting the countries from economic breakdown, monitoring, and disease detection of Brassica plants are required. Brassica plants become infected due to seasonal climate changes, global environmental chair variations, and cultivation processes. Alternaria Leaf Spot, Bacterial Wilt, Fire Blight, Downy Mildew, Powdery Mildew, Blackspot, and blackleg are examples of fungal diseases in Brassica plants. When a Brassica plant is infected by any of these diseases, it stops growing and ultimately dies [4].
Earlier monitoring and disease identification were performed manually which was inaccurate, time-consuming, and expensive. Later it was replaced by automation and evolving technology such as artificial intelligence (AI), Internet-of-Things (IoT), etc. Moreover, the rapid development of data acquisition modalities such as UAVs, high-technology remote sensors, and ML algorithms have opened new perspectives for monitoring and disease identification. Especially UAV swarms offer better protection of Brassica plants, sustainability, and optimize profitability [5]. Various Agritech startups are providing services of drone-based monitoring and disease identification which reduces the imports and boosts the exports of a country. UAVs are not only economically beneficial but also environmentally friendly as they produce negligible or no pollution [6].
UAV swarms are equipped with remote optical cameras and sensors to provide high-resolution images for appropriate disease diagnosis and monitoring of Brassica plants. The widely utilized sensors are RGB (red, green, and blue), multispectral, hyperspectral, infrared thermal (IRT), and fluorescence imaging cameras [7]. However, in some cases, UAV-generated images are blurred and may contain noisy backgrounds. To remove such effects, various image processing steps such as image acquisition, image restoration, image enhancement, image segmentation, feature extraction, and image classification are applied. For analyzing images accurately, different supervised and unsupervised ML algorithms are employed such as support vector machine (SVM) [8] and KNN [9]. Nevertheless, these methods do not provide an ideal tradeoff between accuracy and time therefore deep learning (DL) is more significant in this context as it can improve the trustworthiness and authenticity of the diagnosis and monitoring [10].
Monitoring, accurate identification of disease symptoms, and estimation of the disease’s severity and effects are important not only for plant research but also for food security. Therefore, the main purpose of this review paper is to promote applications of UAV swarms for effective monitoring and early disease diagnosis of Brassica plants. For this purpose, we have plotted a framework while exploring three research domains, UAV swarms, ML approaches, and Brassica plants as can be seen in Fig. 1. The primary focus of this framework is from the perspective of integration of these three domains. Research is widely pursued in isolation of all these domains; however, a review is not conducted on the integration of all these domains which highlights the research gap. Therefore, the novelty of this paper is to bridge the gap of lacking a survey that covers maximum research domains for Brassica plants and UAV swarm-related technologies as shown in the next section.
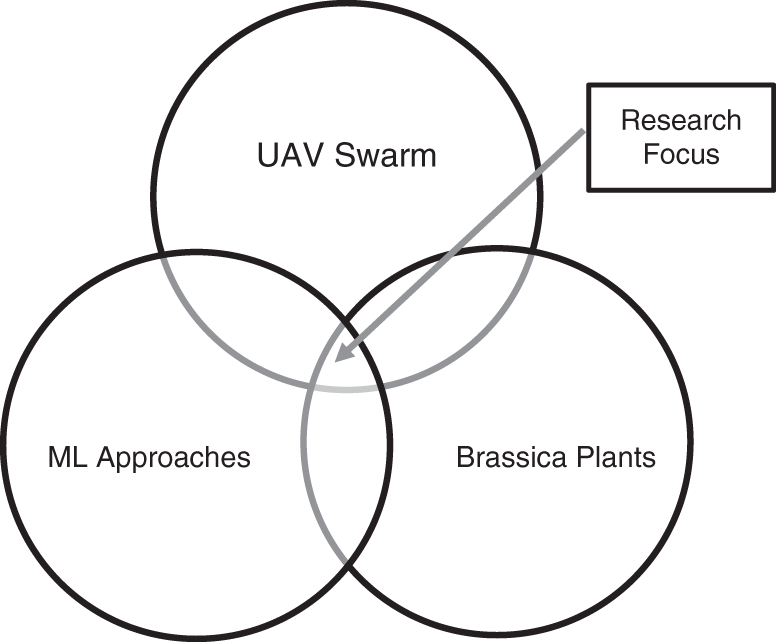
Figure 1: Review framework with the research focus
We searched articles in different databases, such as Science Direct, Google Scholar, SpringerLink, SAGE Journals, IEEE Xplore, and Wiley Online Library Journal. In the advanced search section of these database repositories, the period from 2018 to 2023 was selected. While plotting the framework we ensured to include all the important studies. After selecting the first batch of research papers, their related articles were also searched. To extract relevant articles, we read the abstract of all the retrieved articles. The screening criteria include deleting non-English and duplicate papers. We included the papers which were focused on optical sensors and machine learning approaches. We excluded the papers which were focused on other remote sensing tools and sensors. This review is proposed for farmers and researchers who are inclined to study Brassica plants and UAV swarms. The major contributions of the paper include:
1. Comparative analysis with different existing literature surveys.
2. A comprehensive study on Brassica plants, their diseases, and disease detection methods.
3. Explanation of UAV swarm approach, remote sensing cameras and sensors, image processing, and ML techniques with comparative analysis of other studies.
4. Applications of UAV swarms for Brassica monitoring and disease identification.
5. Examination of certain challenges regarding UAV swarm-based applications.
The layout of the paper has many sections in which Section 1 discusses the introduction, background, scope and contribution, and paper organization. Section 2 gives an insight into the existing literature surveys and compares this work with them. Section 3 presents preliminaries of Brassica plants, diseases, and symptoms, various disease detection methods, and cameras and sensors. Section 4 describes the UAV swarm approach by detailing the bio-inspired approach, swarm optimization, and multi-UAV remote sensing. Section 5 discusses image analysis by explaining image processing and ML algorithms. This section also explores various applications of UAV swarms for Brassica plants and Section 6 evaluates the challenges of UAV swarms-based applications whereas Section 7 presents the discussion and Section 8 concludes this paper. Section 9 suggests future work.
Existing surveys show that UAVs remote sensing is widely employed for different research in plants. The analysis evaluates the opportunities of using UAVs in monitoring plants for yield estimation, health, water stress, and nutrition disorders along with disease detection, pest management, irrigation management, fertilizer, and pesticide spraying. All these survey papers discuss the usage of UAVs with different technologies such as different image analysis techniques and different sensors. We have discussed some existing literature surveys in this section that use UAVs for studying and analyzing plants.
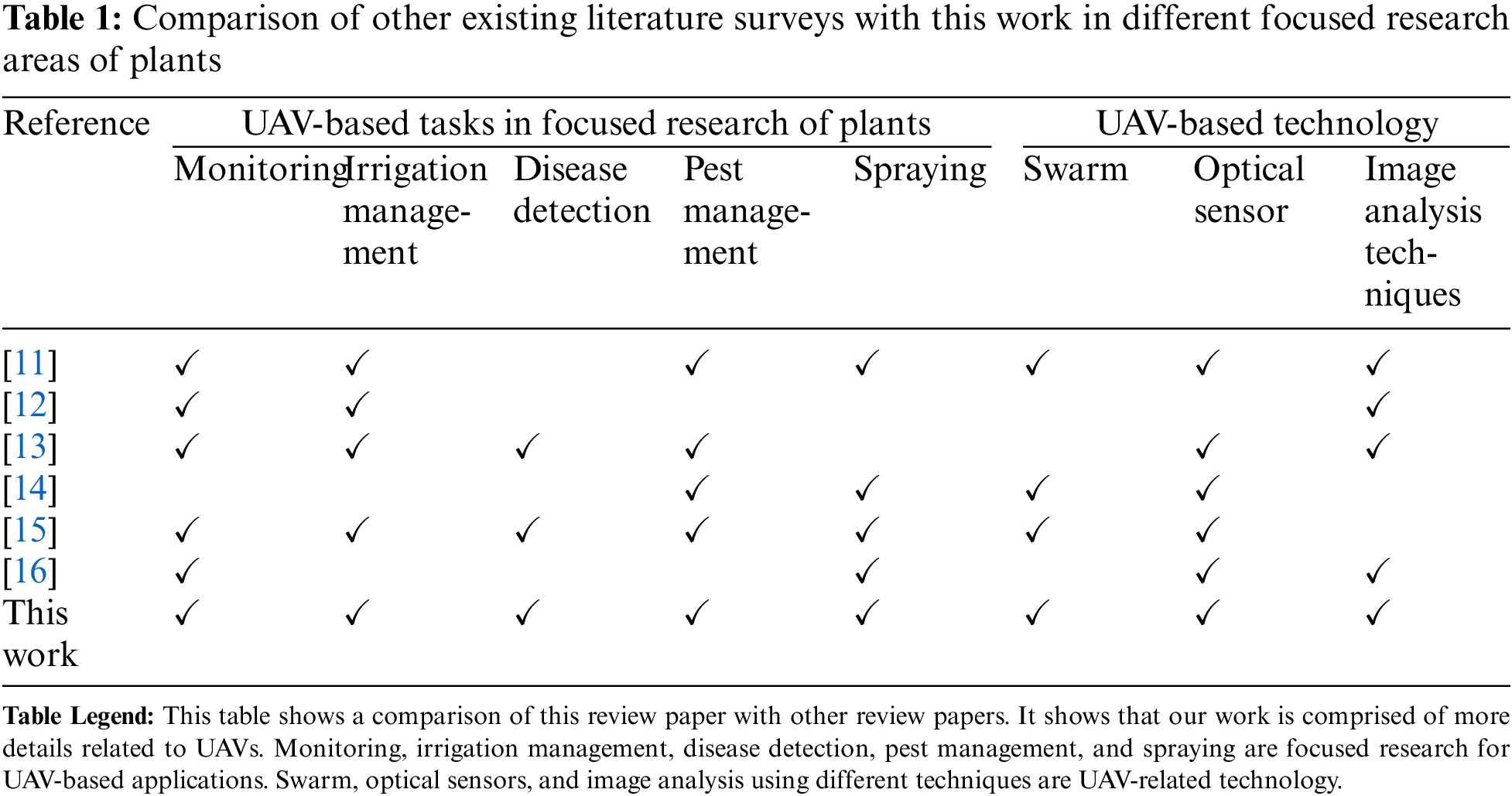
In [11], several types, deployment architectures, application areas, sensors, and research domains of UAVs are evaluated. It also explains a comparative analysis of different kinds of UAVs, sensing techniques, and architectures with their application in precision agriculture. Some challenges and future research domains are also outlined. In [12], the monitoring and improvement of irrigation farming are evaluated. Different monitoring and control techniques based on IoT technology and systems of commercial irrigation are discussed. This review provides significant ways to ensure water saving and optimize the energy required for irrigation leading to improvement in crop yield. In [13], phenotyping of several abiotic and biotic stresses of different plants is discussed. Different phenotyping platforms, imaging techniques, spectral indices, big data, and machine learning (ML) techniques are explained. This review presents the potential advantages and limitations of different high throughput phenotyping (HTP) platforms with ML and DL techniques. In the end, some conceptual challenges along with future research directions are proposed. In [14], Chen et al. discussed UAVs as potential tools for spraying. Some factors that affect the spraying performance are also explained. Technologies such as remote sensing, spray drift models, and vibrate-rate approaches are also evaluated that increases the application efficiency. This survey paper inspires the researchers to adopt a combination of these stated technologies to improve aerial spraying in the future. In [15], opportunities for UAV swarms for multiple missions are explored. Such as coordination for mapping larger areas, leveraging several types of sensors, and targeting areas to inspect closely and identifying and solving problems quickly. Different challenges and recent advances for swarm deployment are also discussed. In [16], drone technology is suggested for the modernization of farms. It discusses different UAV-based technologies with modifications such as modifications in structure, sensors, and spot area spraying. It covers UAV applications for monitoring and spraying pesticides. Artificial intelligence (AI) and DL techniques are also discussed. Table 1 presents a comparative analysis of this review paper with other existing surveys. It shows that this work bridges the research gap by focusing on the maximum research domains of plants and UAV-based technologies.
This section provides an initial overview of Brassica plants, diseases and symptoms, methods of disease identification, and different cameras and sensors. A better understanding of these concepts helped in planning this review as it is crucial to understand the parameters for interpreting the results of a study in the desired way.
Brassica plants include bok choy, broccoli, cauliflower, cabbage, choy sum, kohlrabi, napa cabbage, rutabaga, turnip, etc. Fig. 2 shows that several species and varieties are obtained from different parts of Brassica Oleracea. For example, cabbage is obtained from terminal buds, brussels sprouts are picked from lateral buds, kohlrabi is chosen from the stem, kale is obtained as leaves, broccoli is picked from stems and flowers, and cauliflower is obtained from flower clusters. Brassica chinensis, a leafy vegetable belonging to the mustard family, is very helpful to provide nutrition to humans. Brassica plants are good sources of dietary fiber containing a high level of Vitamin A, Vitamin C, Vitamin E, and Vitamin K, Iron, Calcium, Potassium, Phosphorus, and Folate as well as glucosinolates. These plants have multiple uses from usage as raw materials for oil production to usage as food. Usually, the growth of these plants is affected by multiple factors such as the quality of soil, fertility, and environmental agronomic factor [17]. In a controlled environment, large varieties of Brassica vegetables are monitored in plant factories.
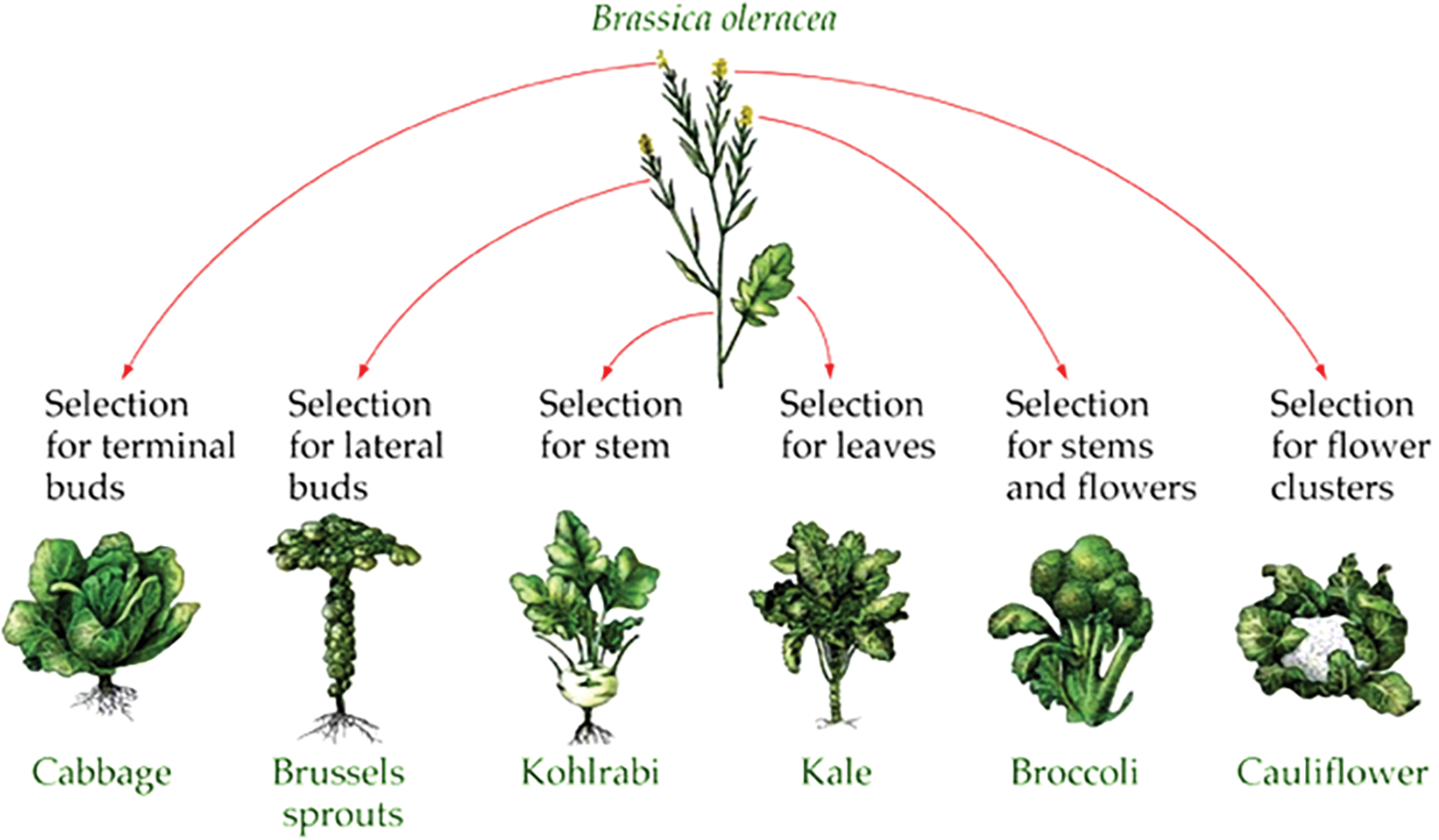
Figure 2: Different parts of Brassica plants provide different species and varieties
Fungi, viruses, and bacteria infect Brassica plants with different diseases [18]. Fig. 3 highlights some of the common Brassica diseases such as (a) Clubroot (CR), (b) Blackleg (BL), (c) Stem Rot (SR), (d) Turnip Mosaic Virus (TuMV), (e) Blackrot (BR), (f) Downy Mildew (DM), (g) Fusarium Wilt (FW) and (h) Alternaria Leaf Spot (ALS). A detailed overview of these diseases is given below.
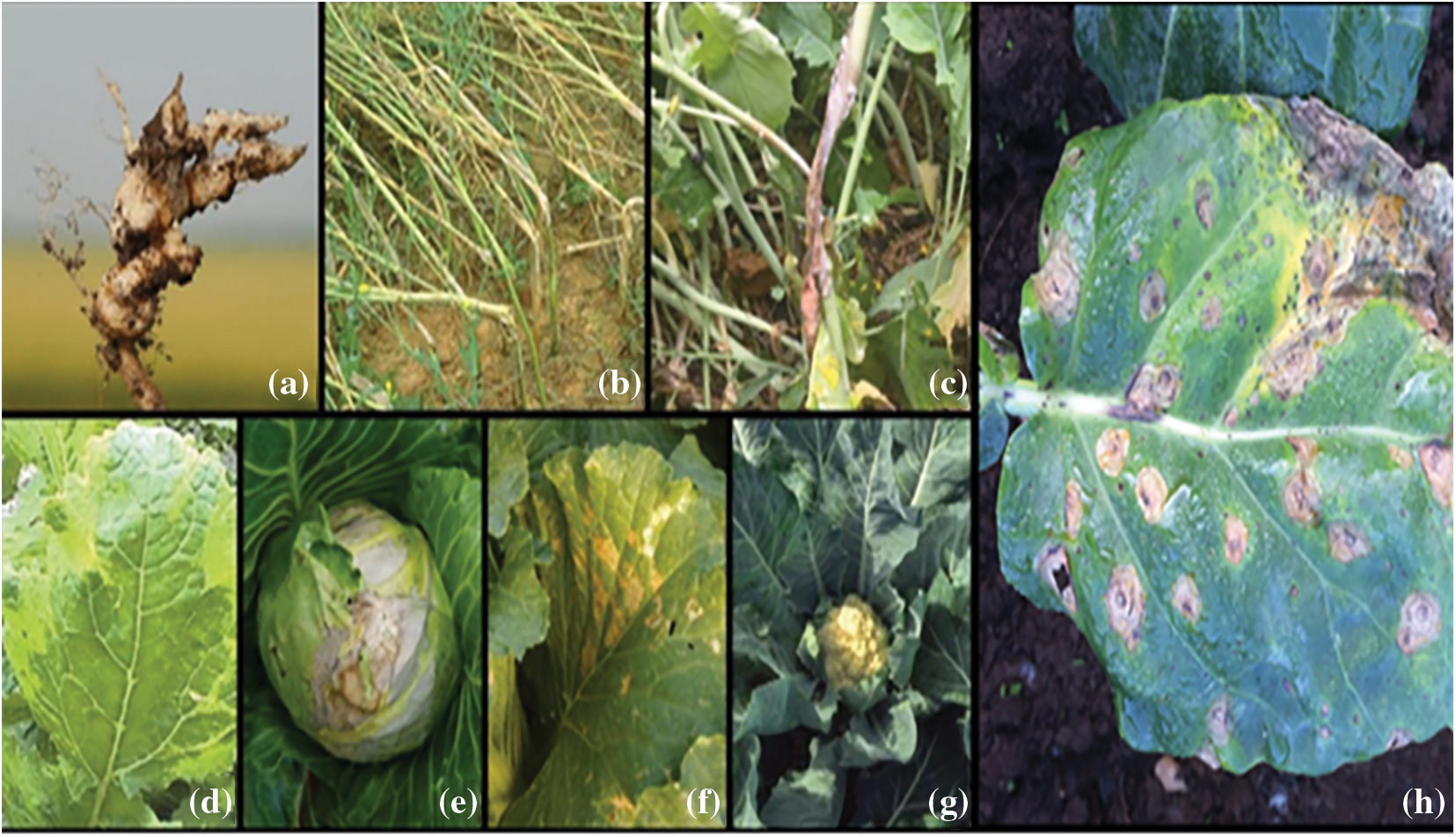
Figure 3: Core diseases in Brassica are (a) Clubroot (CR), (b) Blackleg (BL), (c) Stem Rot (SR), (d) Turnip Mosaic Virus (TuMV), (e) Blackrot (BR), (f) Downy Mildew (DM), (g) Fusarium Wilt (FW) and (h) Alternaria Leaf Spot (ALS)
Turnip Mosaic Virus (TuMV) is the most existing viral disease of Brassica crops that has a significant impact on production losses immensely [19]. Its symptoms are irregular lesions on leaves. This disease was reported in B. rapa in the United States in 1921. Its life cycle is 3 to 4 days and it is transmitted by aphid vectors. Control weeds and rotating crops may prevent Brassica from TuMV. Blackrot (BR), a casual variant of Xanthomonas campestris pv, campestris (Xcc), is another existing bacterial disease that affects the growth of Brassica crops [20]. Yellow to light brown patches at the leaves signifies the presence of BR. This disease originated in the United States by Garman as a disease of cabbage. It can stay up to 2 years and splashing rain and insects are the main transmission sources of it. Using copper products may prevent plants from it. Blackleg (BL) or stem canker is a fatal fungal disease for the Brassica crops affected by Leptosphaeria maculans (Lm) reported on cabbage in Wisconsin [21]. Its symptoms are light brown lesions with a purplish outline having pinhead-sized black dots. These lesions are linear and irregularly distributed and the period of this disease is 2 years. BL is usually transmitted by skin wounds and contaminated needles or injection equipment. Vaccination of all calves at an early age may prevent this disease.
Stem Rot (SR) is another prevailing fungal disease caused by Sclerotinia sclerotiorum (Ss), which affects enormously the Brassica crops [22]. Rapid yellowing and wilting are the significant symptoms. SR was reported in 1837 as a pathogen and now exists worldwide. SR has a life cycle of 1 year and is transmitted field to the field by air-borne spores. Minimizing the carryover inoculum level may keep Brassica plants safe from SR disease. Fusarium Wilt (FW) is another fatal fungus disease caused by the Fusarium oxysporum conglutinans (Foc). Yellowing, stunting, and death of seedlings and yellowing and stunting of older plants identify the presence of FW. Smith in the United States identified this plant disease in 1895 specifically in cabbage [23]. FW can stay up to 5 to 10 years and most often enter through root wounds caused by cultivation or by nematode feeding. Using resistant or tolerant cultivars is a preventive measure. Downy Mildew (DM) is also a fungus and foliar fatal disease of Brassica crops and is considered a casual variant of the oomycete pathogen Hyaloperonospora brassicae (Hb). Yellow spots start appearing on the leaves if DM has affected the leaves [24]. DM can stay in Brassica for 7 to 10 days only and can be transmitted by air and waterborne. Air circulation is an effective preventive measure against DM.
Clubroot (CR) is another threatening plant disease caused by Plasmodiophora brassicae (Pb) [25]. Pb is neither a slime mold nor a fungus disease but emerged as a new taxon of Rhizaria disease. Plants seem stunted, wilt easily, and may have yellowing leaves. CR was first reported in 1878 in Russia. CR has the longest life cycle of around 20 years. The movement of soil containing soil-borne resting spores is responsible for its transmission. Maintaining a soil pH of 6.8 or higher may keep Brassica safe from CR. The next foliar disease is Alternaria leaf spot (ALS), which is frequently found in Brassica crops, and can be observed by the fungus Alternaria brassicicola. It was first identified in South Africa in 1929 [26]. The most typical indicator of Alternaria infections is the presence of target-like, concentric rings on yellow, dark brown to black circular leaf patches. It can stay in plants for 8 to 12 weeks and lasts up to 23 weeks on stem tissues. Wind, splashing water, insects, workers, and equipment are responsible for its transmission [27]. Using disease-tolerant cultivars and avoiding overhead irrigation, and controlling weeds may prevent Brassica from ALS.
3.3 Methods of Disease Identification
Timely and reliable assessments are essential to perform plant protection research and activities and to stop its spread in the growing regions [28]. It is essential to diagnose the causing pathogen first for appropriate disease diagnosis. Some common disease identification methods include manual disease identification by experts, microscopic methods, molecular and serological methods, gas chromatography, and remote sensing [29]. A brief overview of these methods is given below,
3.3.1 Manual Scouting and Microscopic Methods
Manual scouting is a traditional method in which experts are hired to diagnose diseases with their naked eyes or magnifying glass. These experts identify diseases with visible pathogen signs or symptoms and follow detailed guidelines and specific standards. However, this method is subject to errors and is timely. On the other hand, microscopic methods evaluate morphology features and follow identification schemes and specification keys. In [30] two diagnostic tools scanning electron microscopy (SEM) and light microscopy (LM) were employed to study comprehensive micromorphological features of four kinds of seeds. These seeds are nonedible sources namely cabbage, wild safflower, safflower, and easter lily vine. SEM evaluated a huge variety in color, size, shape, periclinal wall shape, and sculpturing whereas LM showed a huge variety of colors and different size ranges.
3.3.2 Molecular and Serological Methods
Molecular and serological methods are called direct disease detection methods that analyze a large number of crop samples using rapid and highly specific tests. These tests are directly applied in plant fields, in greenhouses, and even in the production chain. The enzyme-linked immune sorbent assay (ELISA) is so far the most commonly used molecular method. Other pathogen detection methods are (Ribonucleic acid) RNA-based and Deoxyribonucleic acid (DNA)-based methods. Many variants of polymerase chain reaction (PCR) and fluorescence in situ hybridization (FISH) are examples of DNA-based methods whereas nucleic acid sequence-based amplification (NASBA) and reverse transcriptase PCR are RNA-based methods. Different variants of PCR are applicable for pathogen identification in plants. A study diagnosed three pathogens causing ALS and BR in Brassica seeds. This study signifies the usage of multiplex PCR protocol for facilitating disease-free conservation and exchange of Brassica seeds [31]. The researchers applied conventional PCR assay in different Indian regions for identifying a pathogen causing a devastating disease called white rust in mustard and rapeseed [32]. They gave a new nomenclature to that pathogen.
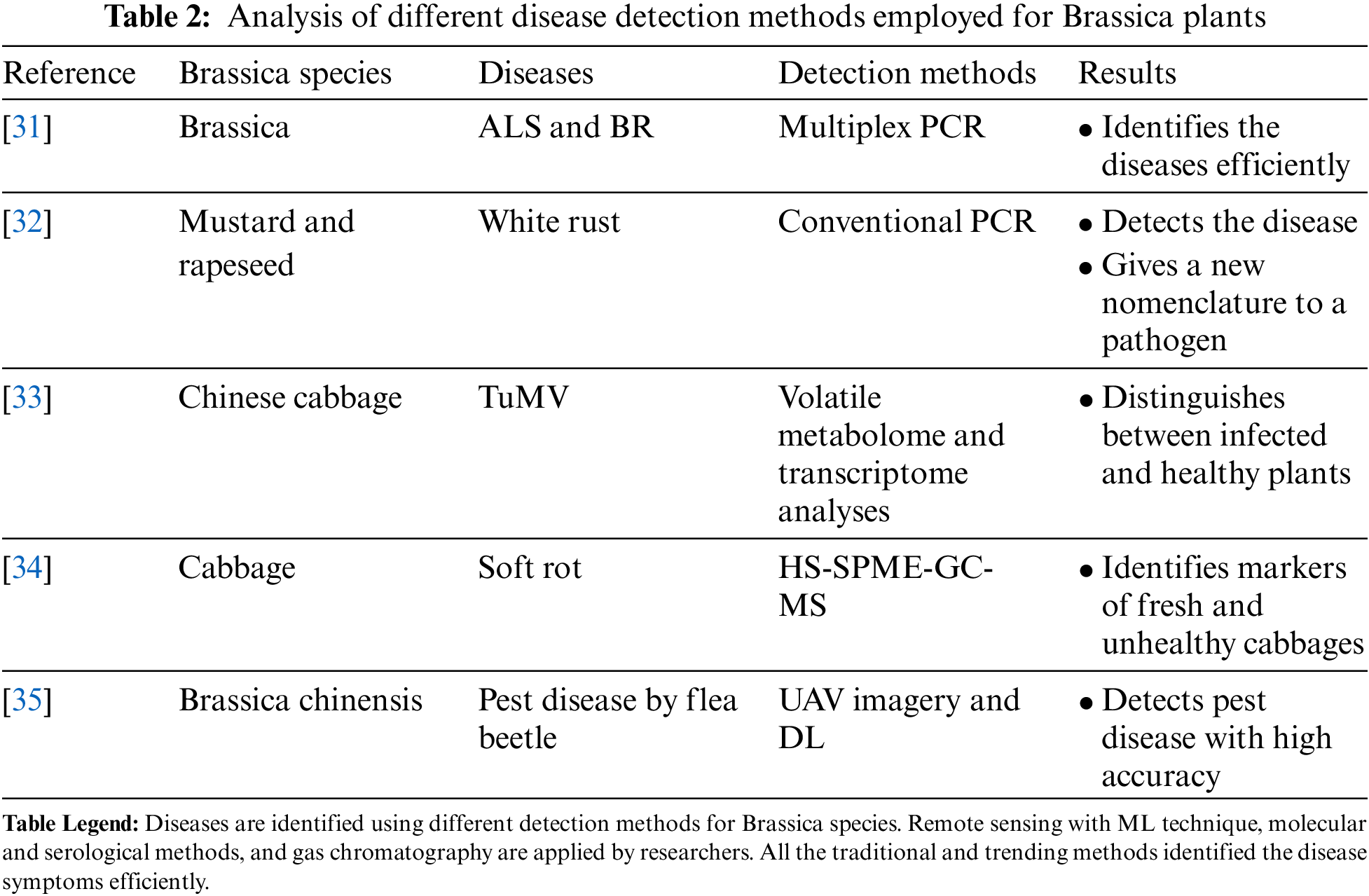
Plants in their immediate surrounding emit volatile organic compounds (VOCs) that readily exist in the gaseous state and show the physiological health status of a plant. Gas chromatography (GC) is an indirect and non-optical disease detection method that involves VOC profiling. The GC method analyzes the volatile chemical signature of a plant that indicates a specific disease in that plant [33]. In this study, TuMV was diagnosed accurately using volatile metabolome and transcriptome analyses. For identifying different unknown compounds and enhancing the analysis performance, GC is merged with mass spectrometry (GC-MS). Both GC and GC-MS techniques give more accurate information because of their high specificity. Moreover, it uses quantitative information from the VOC sample and detects diseases at different stages. The headspace solid-phase microextraction and gas chromatography along with mass spectrometry (HS-SPME-GC-MS) is applied for identifying particular volatile metabolic markers [34]. This approach identified markers of fresh and infected with soft rot disease and proves to be promising for quality control and managing the freshness of cabbages. Table 2 presents the analysis of different disease detection methods used for Brassica plants.
3.3.4 Remote Sensing Based Disease Detection
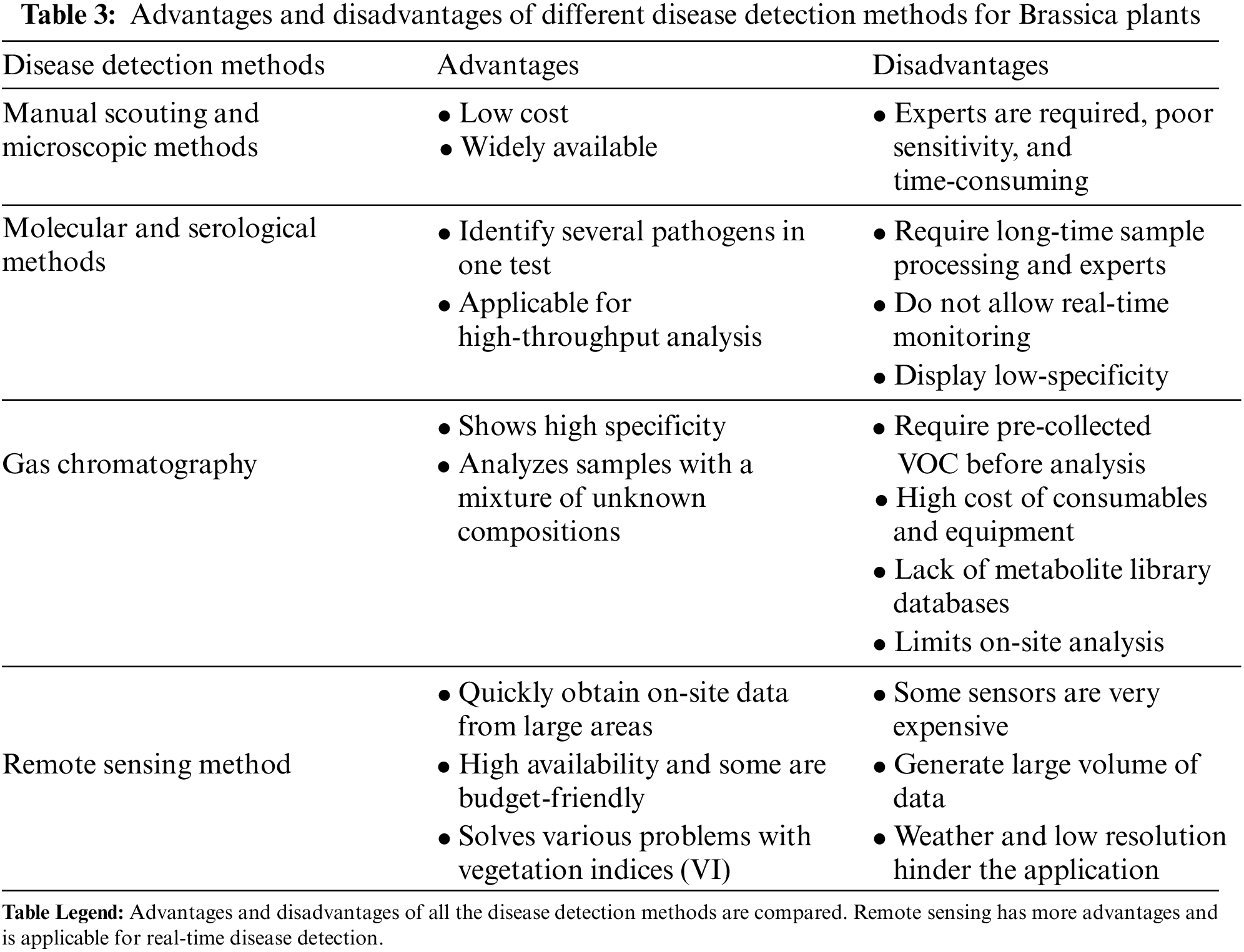
The disease causes variations in leaf shape, tissue color, canopy morphology, transpiration rate, plant density, and interaction with sunlight. Therefore, plants require new automated ways that detect, classify and quantify diseases with high accuracy and reliability. Sensor-based methods are gaining much momentum in this context. Sensors examine the optical properties of plants and are capable to extract information beyond the visible range. They give early diagnosis even when the symptoms do not appear by measuring temperature, reflectance, and fluorescence. Some widely used sensors are RGB, multispectral, thermal infrared, hyperspectral, and others. In [36], RGB images of kohlrabi were obtained using UAVs that contained weeds and bare soil in the background. Using Otsu’s thresholding and vegetative indices (VIs), the unhealthy, healthy, and other backgrounds are distinguished in a better way. Comprehensive details on cameras and sensors are discussed in the succeeding sections. After analyzing various studies, we have summarized the key advantages and disadvantages of the above-mentioned detection methods in Table 3.
With the advances in precision agriculture, new solutions for plant monitoring and disease identification have developed. Cameras and sensors provide high-resolution data, constitute the basis for early disease detection, and evaluate health non-invasively. Moreover, the development of low-cost cameras and sensors providing satisfactory performance is a significant development for future applications in agriculture. Different cameras and sensors are RGB cameras, multispectral cameras, hyperspectral cameras, infrared thermal imagers, and fluorescence imaging [37].
The salient features of mostly used RGB cameras are lightweight, easy to operate, simple data processing, low cost, and less work environmental requirements. These cameras are capable of acquiring color and grayscale images that assist in identifying diseases in plant tissues by modifying texture, color, and spectral information. Nevertheless, because of limited visible light bands, these cameras may give insufficient spectral information for characterizing symptoms and identifying diseases accurately [38]. RGB camera was attached to a UAV for capturing images of rapeseed to estimate chlorophyll amount [39] and images of cabbage, wheat, barley, and pumpkin to evaluate the growth of individual plants [40].
The second widely used sensor for radiation sensing and recording from the visible as well as invisible portions of the electromagnetic spectrum is multispectral cameras. These are relatively cheaper and provide high work efficiency and fast frame imaging [41]. Nevertheless, these sensors possess some limitations such as they give a discontinuous spectrum, no number of bands, and low spectral resolution. Multispectral UAV imagery was employed for detecting phenological stages in winter canola [42] and for estimating the yield estimation of oil seed rape [43].
Another commonly applied sensor is hyperspectral sensing, which is capable of sensing and recording a huge number of narrow bands along with continuous spectra. These sensors provide more spectral band information with higher spectral resolution, therefore, help in distinguishing the variation in spectral traits among different plants and diseases [44]. In [7], hyperspectral images of broccoli provided quantitative parameters for detecting glucosinolates levels. In [45], two cameras were used for estimating vegetable crop biomass. RGB three-dimensional (3D) was attached to UAV for acquiring height information and terrestrial hyperspectral imagery was used for obtaining reflectance information on cabbage, tomato, and eggplant. Analysis of multi-sensory data showed that both sensors gave promising results.
Infrared thermography (IRT) can detect the emitted radiation only in the thermal infrared range from 8 to 14 μm. The sensors are used for assessing the surface temperature of plant canopies and leaves which are usually affected by water status. Due to the loss of healthy tissue, photosynthesis, and stomatal conductance, the disease tissues and plants mostly suffer from water stress leading to changes in the temperature of plants. IRT can be used at different spatial and temporal scales from small-scale to airborne applications. However, these sensors are subject to many environmental factors such as wind speed, rainfall, sunlight, and extreme temperature. In [46], thermal infrared images using WWARIC Workswell Wiris Agro R Infrared Camera (WWARIC) and hyperspectral images using Analytical Spectral Device (ASD) were captured of choy sum for estimating water stress. Results showed that this combined technique is non-destructive and rapid.
3.4.5 Fluorescence Imaging Camera
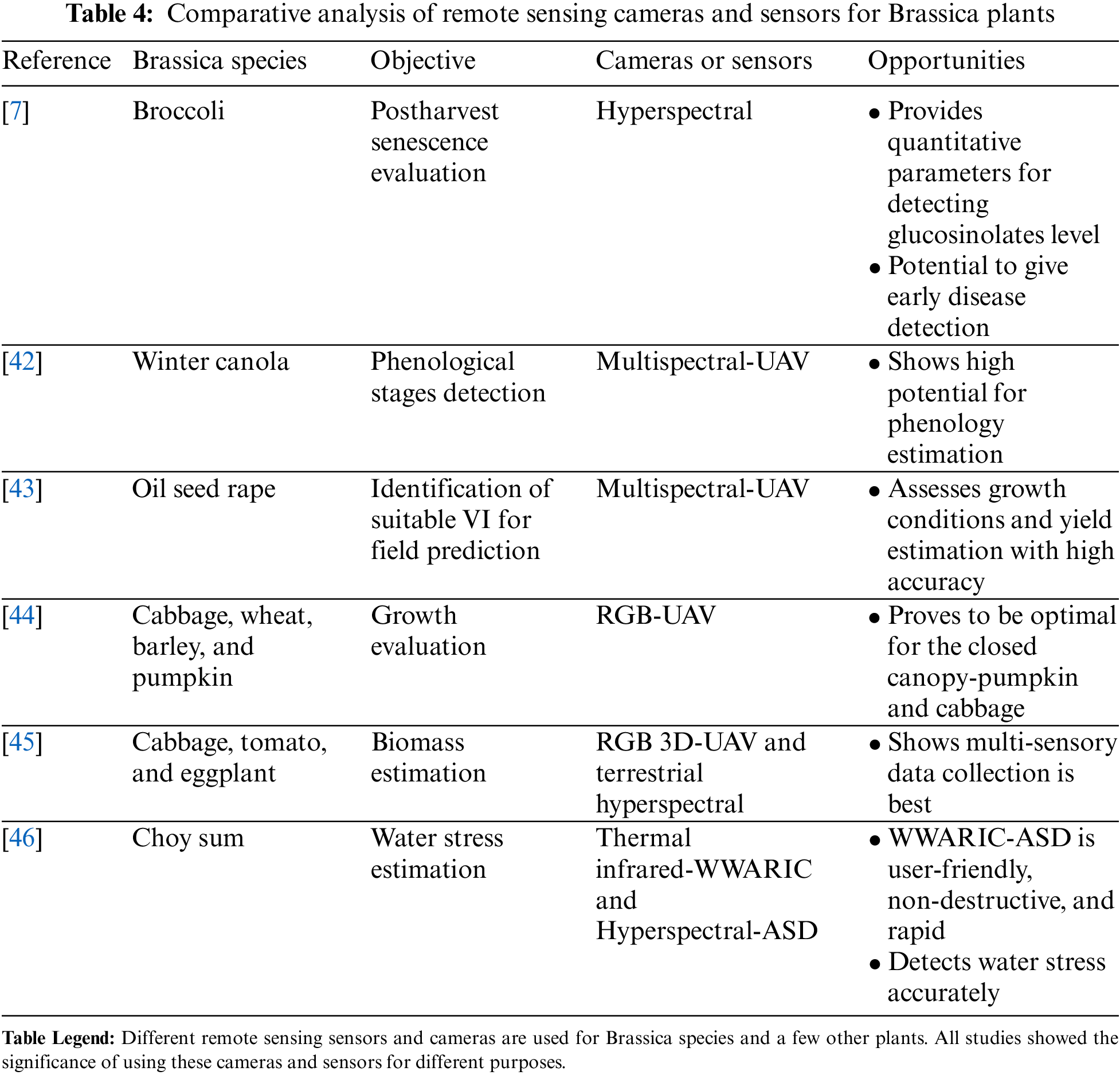
Fluorescence cameras are not widely used for disease detection in active plants. These cameras have a laser light source or a light-emitting diode (LED) to analyze the changes in the photosynthetic activity under different biotech and abiotic stress levels. Several parameters are applied for estimating differences in the photosynthetic plant activities. Therefore, fluorescence cameras have the potential for the classification and qualification of fungal diseases in plants. The limitation of using a fluorescence camera is to prepare the plants following a strict protocol [47]. Downscaling of solar-induced chlorophyll fluorescence (SIF) was applied in [48] to better examine the relationship between SIF and gross primary production (GPP) over Chinese cabbage, sweet potato, pumpkin, thyme, and cotton. Random forest gave efficient results for estimating SIF escape probability. The proposed method is effective for both airborne and ground-based SIF measurements. Table 4 shows the significance of utilizing remote sensing cameras and sensors with different objectives for Brassica plants in different studies.
This section explains the bio-inspired approach with its prime capabilities and swarm optimization. Then, it explains the significance of using multi UAVs remote sensing in agriculture.
Swarm intelligence (SI) is one of the most popular bio-inspired computational optimization methods for dealing the real-world applications more effectively [49]. The primary reason for its popularity is that this algorithm is best suited for solving various nonlinear problems in terms of versatility and flexibility. Bio-inspired computation algorithms have penetrated all areas of engineering, sciences, and industries from data collection and data mining to the optimization approach [50]. This algorithm can also be beneficial for a smooth transition from computational intelligence to business planning and from bioinformatics to industrial applications. Therefore, it is one of the most innovative and advanced research subjects in multidisciplinary fields like agriculture, engineering, and sciences. The key capabilities of Swarm intelligence are reflected in Fig. 4, where it can be observed as a collective intelligence including four core parameters such as scheduling, clustering, routing, and optimization. The scheduling process is initiated to adapt swarm intelligence for addressing meeting scheduling (MS) problems. Clustering represents a huge amount of data sets by concise it into a fewer number of prototypes of clusters. Routing provides the best path to follow and obtain the desired results. Optimization is characterized by the biological or movement form of the material.
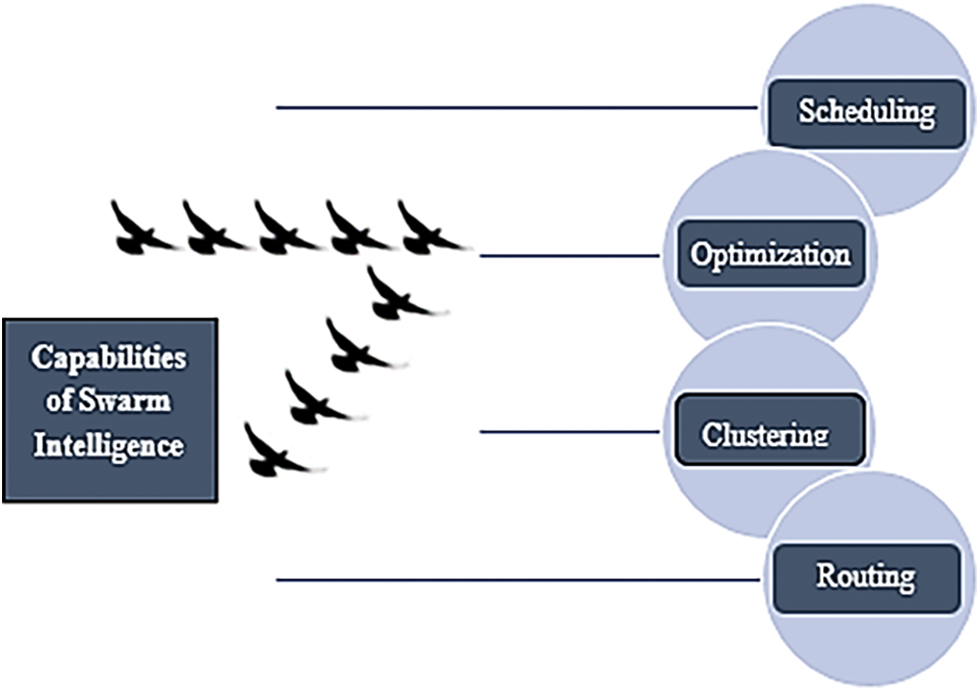
Figure 4: Core capabilities of swarm intelligence
Optimization is a broad area of research and is an important paradigm with a wide range of applications. In the field of engineering and industry, the term optimizes means to minimize the cost and energy consumption or to maximize profit, performance, and efficiency. In practical applications, resources, time and money can be considered major limiting factors so optimization is a very important aspect of an effective and efficient system [51]. The optimization problem looks simple but usually, it is very challenging to achieve the desired result. These challenges are nonlinearity and complex constraints. Nonlinearity complicates the search boundaries and search domains because of its highly multimodal and potentially non-smooth behavior. Therefore, algorithm evaluations for addressing all constraints can be complex and time-consuming. In different applications, the optimization algorithm involves the estimation of objectives many times. There may be thousands or millions of configurations involving extensive computational tools such as finite element solvers and simulators. Therefore, an effective optimization technique must work in a combination of both a simulator and an efficient solver.
Since the last decade, remote sensing has become one of the most attractive fields for researchers. Remote sensing is extensively applied in agriculture, as it requires up-to-date and accurate data in terms of improved spectral, spatial, and temporal resolutions [52]. Because of the traditional airborne remote sensing platforms, satellites have a slow update rate and provide low spatial and temporal resolution data therefore they are not appropriate for real-time objectives. Other airborne platforms may provide more appropriate data but are expensive. On the other hand, UAVs possess low operational costs, collect high-intensity data, host multiple sensors, and can be flexibly used for real-time operations. And provide a large scale of applications. UAVs can significantly reduce labor requirements and working hours and improve work efficiency. Therefore, these peculiarities make it a more suitable alternative for agricultural tasks [53].
Deploying a single UAV may not be suitable for more challenging tasks for example real-time mapping and monitoring of large-scale fields [54]. A single UAV takes considerable energy and time, whereas multi-UAVs work in collaboration and carry out tasks more efficiently in less time. Such as a UAV was employed to spray picarbutrazox on Chinese cabbage [2]. Results showed that the residual distribution of pesticides was not uniform and high in the center. In another study, multispectral images were obtained using multi-UAVs under different spatiotemporal conditions in the highlands of South Korea [55]. The framework efficiently detected the cabbage fields and suggested replacing the manual field surveys with multiple UAVs.
However, analysis of the existing agricultural applications of UAVs shows that single UAVs are more utilized than multi-UAVs. The most important factor for the application of a multi-UAVs system is the ease of control such that a single operator easily controls a group of UAVs. The distributed swarm control algorithm is the solution for safely and efficiently controlling multi-UAVs. Additionally, the computational modeling techniques require different mapping techniques and path planning for multiple UAVs [56]. Therefore, it is feasible to create agent-based models for swarm clusters (UAVs) with the mapping of a wide area field with several optimality conditions such as minimum energy usage, time, optical sensing, infrared sensing, acoustic sensing, and all other relevant sensing requirements. Individual UAVs in the swarm cluster are usually dedicated to the designated regions of the field depending on the requirements. Moreover, the development of microelectromechanical systems and wireless technology makes it easier to deploy a swarm of UAVs for more challenging tasks.
A coverage planning algorithm based on an ant colony system (ACS) is suggested for heterogeneous UAVs to achieve multi-resolution semantic segmentation [57]. The applied strategy obtains good enough paths with full coverage of all regions efficiently and allows performance enhancement with reductions in time consumption and energy wastage. Experimental results validate this strategy. Reinforcement learning (RL) frameworks are suggested for multi-UAVs to solve intricate joint optimization problems [58]. A non-orthogonal multiple access (NOMA) is proposed in this context. Results validate this strategy for performance enhancement in terms of energy efficiency and sum-rate and consequent outage reduction. Moreover, it outperforms existing frameworks.
The collected data is transferred to ground stations or relevant UAVs for processing mostly in case of large computation consumption or insufficient energy resources. Different energy-saving data aggregation protocols are suggested for multi-UAVs to gather and express the summary of the acquired data based on certain variables [59]. These protocols also relieve the degradation of performance due to collisions. Some protocols for large-scale networks are based on the combination of hop-by-hop routing and store-carry-forward routing. After data aggregation, different algorithms are applied to analyze the data.
Image analysis uses computer algorithms for the evasive interpretation of digital images automatically. It merges different technologies such as image processing, pattern recognition, computer graphics, and various other technologies [60]. It is employed for detecting edges, counting objects, removing noise, and calculating growth, particle, color, texture, and shape analysis. For example, images of Chinese cabbage were analyzed by four image processing steps namely, image acquisition by UAV, segmentation by Simple Linear Iterative Clustering (SLIC) Superpixel algorithm, feature selection by Local Binary Pattern (LBP) for Random Forest (RF), and classification by RF and CNN [61].
This section describes different image processing steps used for image analysis. It gives an insight into ML techniques with their advantages and disadvantages. Moreover, applications of UAVs for different Brassica plants are explained and a comparative analysis of different studies is also presented in this section.
The process that transforms an image into its digital form and performs some operations to extract specific information is known as image processing. Its basic components include a general-purpose computer, hardware, digital storage, camera sensor, image display, software, hardcopy equipment, and networking. Its fundamental steps are image acquisition, image restoration, image enhancement, image segmentation, feature extraction, and classification [62]. Fig. 5 represents these phases whereas brief descriptions are given below.
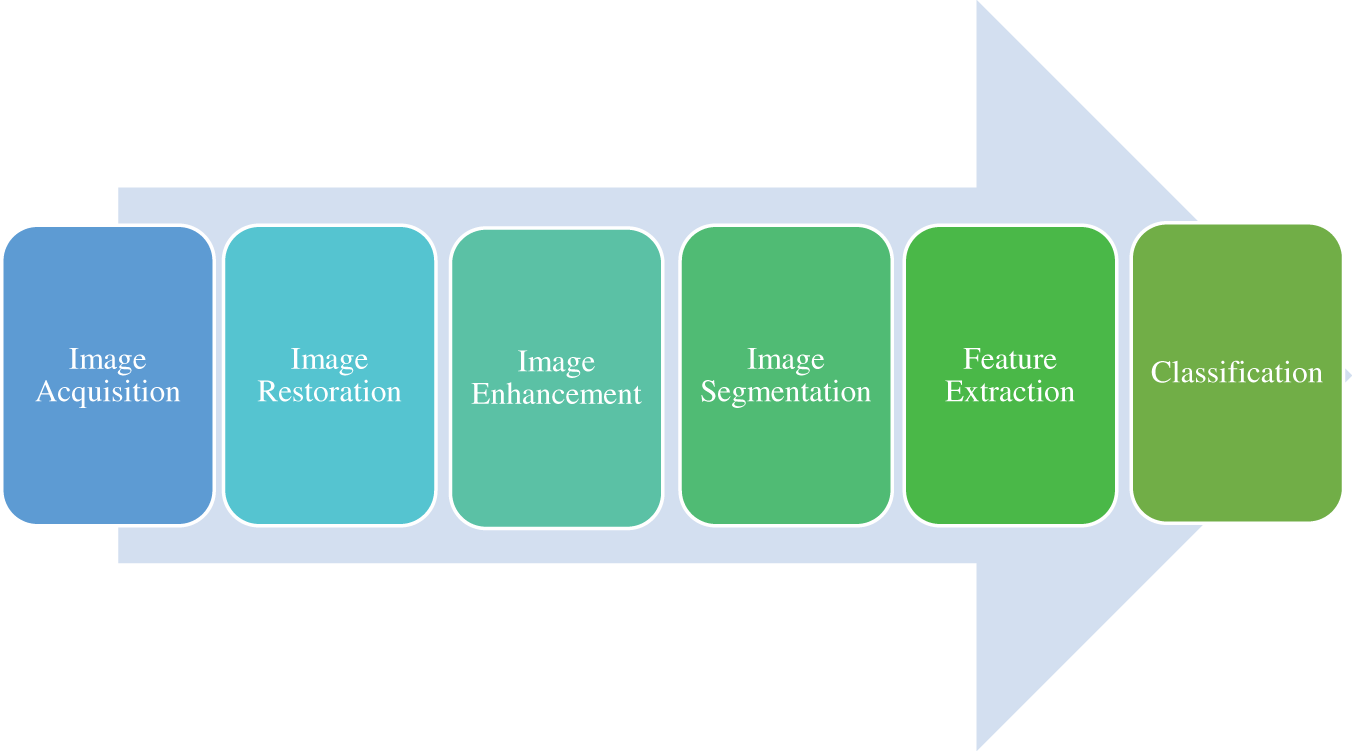
Figure 5: Image processing
Image acquisition is the first image processing step. Images are retrieved from a hardware-based source such as a camera, sensor, mobile phone, and others. These images are captured with desired size and resolution [63]. The next phase which performs various geometric and radiometric corrections to ensure that the captured aerial images look similar to the ground ones is called image restoration. Noise, image errors due to atmospheric scattering, topographic variation, differences in sun angles, sensor features, and positional errors that affect the images while imaging, and storing require image restoration [64]. The next step that improves the information content and quality of images before processing is called image enhancement. This step adjusts digital images by brightening and sharpening the image for better image analysis [65]. Extensively used practices are spatial filtering, contrast stretch, edge enhancement, fuzzy contrast correction (FCC), and density slicing.
The most crucial step that simplifies the image representation making it more significant and easier to assess is called image segmentation [66]. It partitions an image into its parts. Being a basis of the feature extraction step, it is also a fundamental phase in image processing. Various segmentation methods are edge-based, region-based, clustering-based, thresholding, watershed, and neural networks-based. Fig. 6 shows the segmentation of Broccoli heads by improved ResNet, GoogleNet, VggNet, and ResNet taken by the concept of [67].
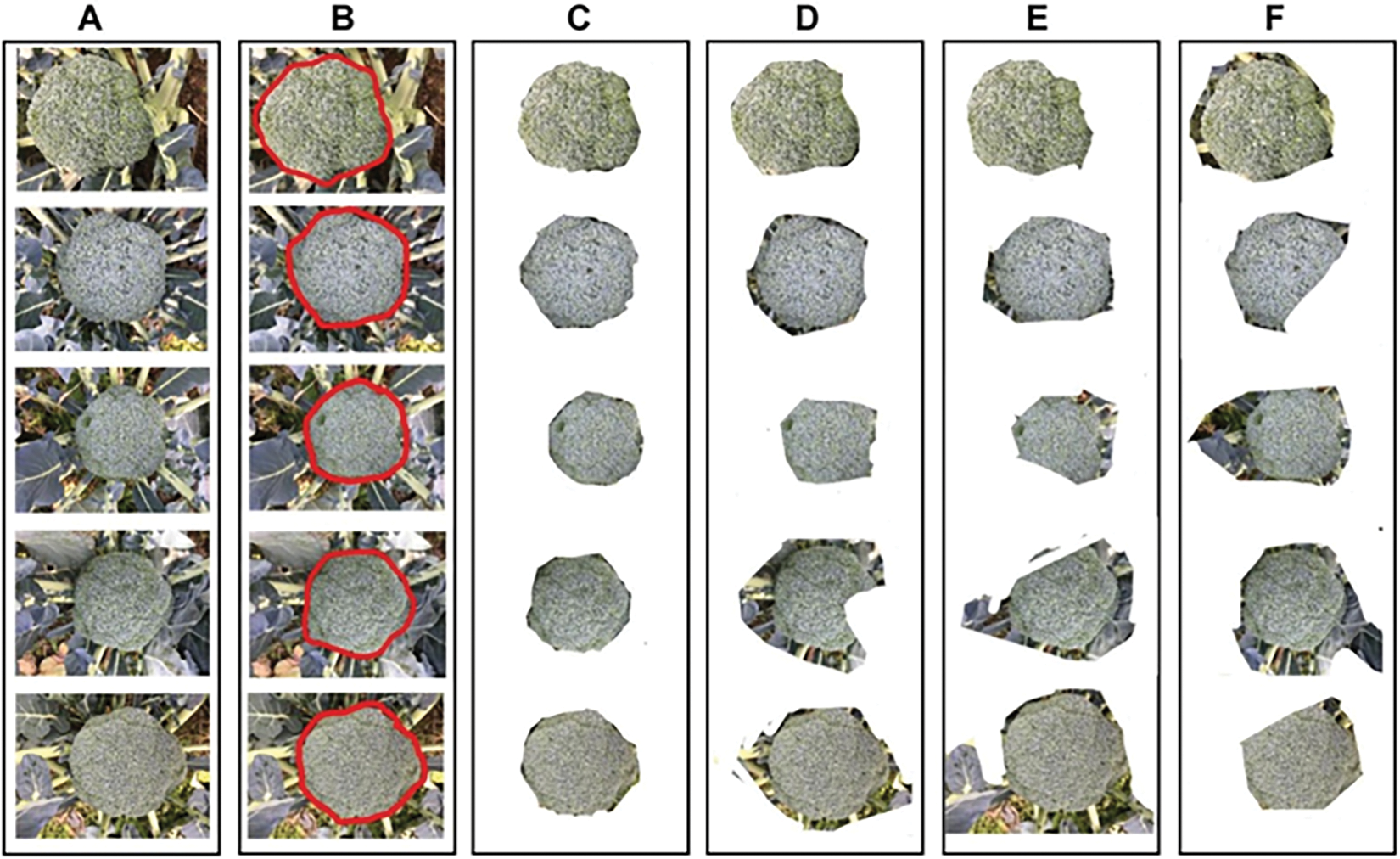
Figure 6: Results of Broccoli head segmentation are (a) original images, (b) annotation results (c) segmentation by improved ResNet, (d) segmentation by GoogleNet, (e) segmentation by VggNet, and (f) segmentation by ResNet
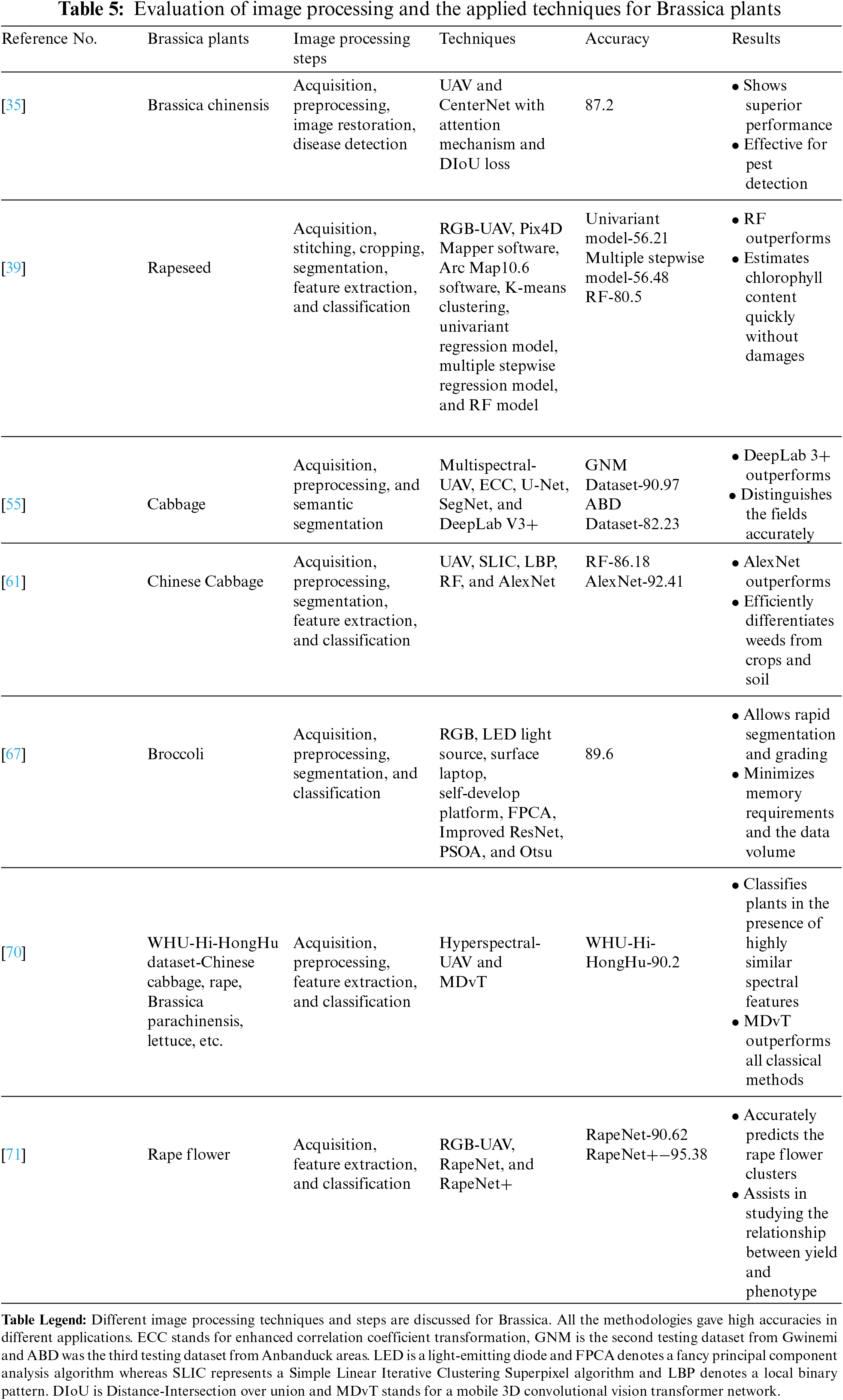
The step that involves the extraction of features from an area of interest is named as feature extraction step. These extracted features are required for determining the interpretations of the sample image. These features are based primely on texture, color, and shape. Widely used feature extraction methods are gray-level co-occurrence matrix (GLCM), spatial grey-level dependence matrix, color co-occurrence method, and histogram-based methods. Besides these ML techniques and CNN architectures provide optimal solutions for feature extraction [68]. The last step that classifies the input images as diseased or healthy following distinct criteria is image classification. For diseased images, the images are further categorized into various disease classes. Several classifiers are assorted together according to various rules such as object-based, pixel-based, parametric, and nonparametric-based. Supervised and unsupervised ML classifiers detect diseases with higher accuracy [69]. These are discussed comprehensively in the next section. Table 5 presents the evaluation of image processing steps along with different methodologies used for it. Results show image analysis and ML techniques are potential approaches for studying Brassica with different objectives.
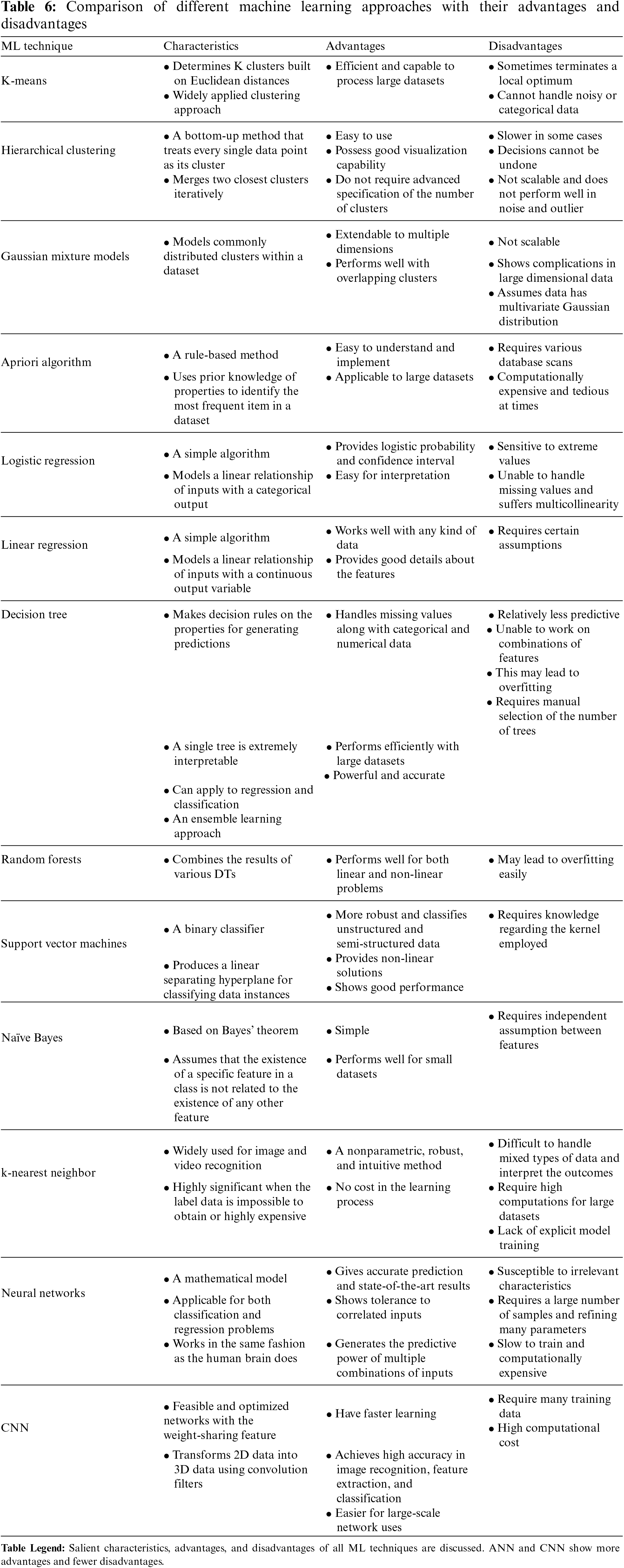
Machine learning (ML) approaches are considered to be potential tools that can be applied to a wide variety of structured and unstructured data. ML techniques are capable to solve complex problems with sensor data allowing more informed decision-making and measures using inconsiderable human intervention. ML approaches are divided into unsupervised, and supervised models. Unsupervised ML algorithms are further classified into clustering and association algorithms. Clustering algorithms include K-means, hierarchical model, and mixture model. Whereas association algorithms include apriori and frequent pattern (FP) growth. Supervised algorithms are further grouped into regression and classification models [72]. Regression algorithms constitute logistic regression, linear regression, decision trees (DT), and hierarchical neural networks. On the other hand, classification algorithms constitute support vector machines (SVMs), Naïve Bayes, k-nearest neighbor (KNN), and neural networks (NNs). After examining various studies, the prime characteristics, advantages, and disadvantages of ML approaches are illustrated in Table 6.
Artificial neural networks (ANNs) are helpful for both classification and regression problems [73]. Moreover, deep ANNs are also called deep learning (DL) or deep neural networks (DNNs) which are tools for image processing, plant monitoring, and disease identification. DL technique is an automated model under ML techniques. DL is capable of performing the segmentation of leaves in plant images and then estimating the segmented area. DL possesses multiple processing layers for learning complex data different from the existing and traditional neural networks [74]. The best feasible and optimized neural networks especially for plant monitoring and disease identification are convolutional neural networks (CNNs). Widely used CNN architectures for disease classification are GoogleNet, AlexNet, VGGNet, EfficientNet, ResNet, DenseNet, and MobileNet.
Some researchers designed custom network architectures for handling low light, occlusion, and other environmental issues in real-world scenarios. For example, a series of TasselNet and RapeNet are developed as deep regression models for counting plants. Some recently introduced deep learning models show advantages over the above-mentioned architectures such as CenterNet, a vision transformer (ViT) model, a mobile 3D convolutional vision transformer network (MDvT), YOLOv7, etc. The CenterNet framework identifies and characterizes the affected areas by employing its heat maps and one-stage recognition algorithm. On the other hand, the transformer-based model also known as vision transformer (ViT) is very competitive with conventional CNNs for image classification and is capable to learn global features of images therefore they are gradually replacing CNNs. Similarly, MDvT has an improved generalization ability due to its layered hierarchy for combining multi-scale information. Another state-of-the-art model is YOLOv7 which also provides a more resilient, robust, and quicker network architecture for feature integration, higher label assignment, efficient model training, and improved performance in object recognition. Nowadays, these DL-based object detection algorithms are broadly applied to determining the precise location and class of different plant diseases [75,76].
The performance of ML and DL techniques is evaluated by various metrics such as accuracy, recall, F1-score, precision, confusion matrix, specificity, precision-recall (PC) curve, and receiver operating characteristics (ROC) curve. The prediction accuracy of ML techniques depends upon the quality of data, representation of a model, and input target variable correlations [77]. However, when multiple feature variables such as geometric, spectral, and textural features of an image are similar, then ideal segmentation and classification become difficult. This results in feature redundancy leading to an increase in training process complexity and a reduction in the accuracy and generalization ability of the algorithm. Hence, optimizers are added to modify the learning rate and weights of learning techniques and minimize the total loss and improve the accuracy. Various optimizers are gradient descent (GD), stochastic gradient descent (SDG), Mini-batch gradient descent, momentum-based gradient descent, Nesterov accelerated gradient (NAG), Adagrad, RMSProp, and Adam. Different studies have applied different optimization techniques. Such a GA algorithm and an estimation of scale-2 (ESP2) are introduced to optimize the segmentation or classification parameters of ML techniques [9]. Findings reveal that approaches with integrated optimization schemes achieve better results in terms of accuracy. In the same study, Mask R-CNN is also optimized with a graphics processor (GPU) that also accelerates its recognition speed.
Ranger optimizer is used to update the weights for the fastai DL framework [54]. AdamW optimizer is applied to train U-Net and DeepLab V3+ whereas SGD is used to train SegNet [55]. Adam and SGD optimizers are integrated with faster R-CNN, RetinaNet, SSD, CenterNet, and EfficientNet [66]. All models perform better with SGD whereas CenterNet performs better with Adam. SGD and momentum are applied to optimize the network parameters of MFC-CNN [68]. The model training is accelerated with the negligence of local optimization. Similarly, Adam is also applied to optimize MDvT [70]. The sum of squares (SOS) and the Broyden–Fletcher–Goldfarb–Shanno (BFGS) algorithms are applied to stabilize convergence and speed up ANN [77]. Adam is applied for optimizing attention-based recurrent convolutional neural networks (ARCNN) [78]. Comparative analysis shows that DL shows higher recognition efficiency than ML techniques, thus they are more significant for real-time applications.
5.3 Applications of UAV Swarms for Brassica Plants
The execution of UAV swarms for Brassica plants is elaborated on in this section. The extensively considered applications are monitoring for yield estimation, heath, water stress, irrigation management, nutrition disorders, disease detection and pest management, and fertilizer and pesticide spraying. Table 7 explores different studies that employ multiple UAVs for monitoring Brassica plants.
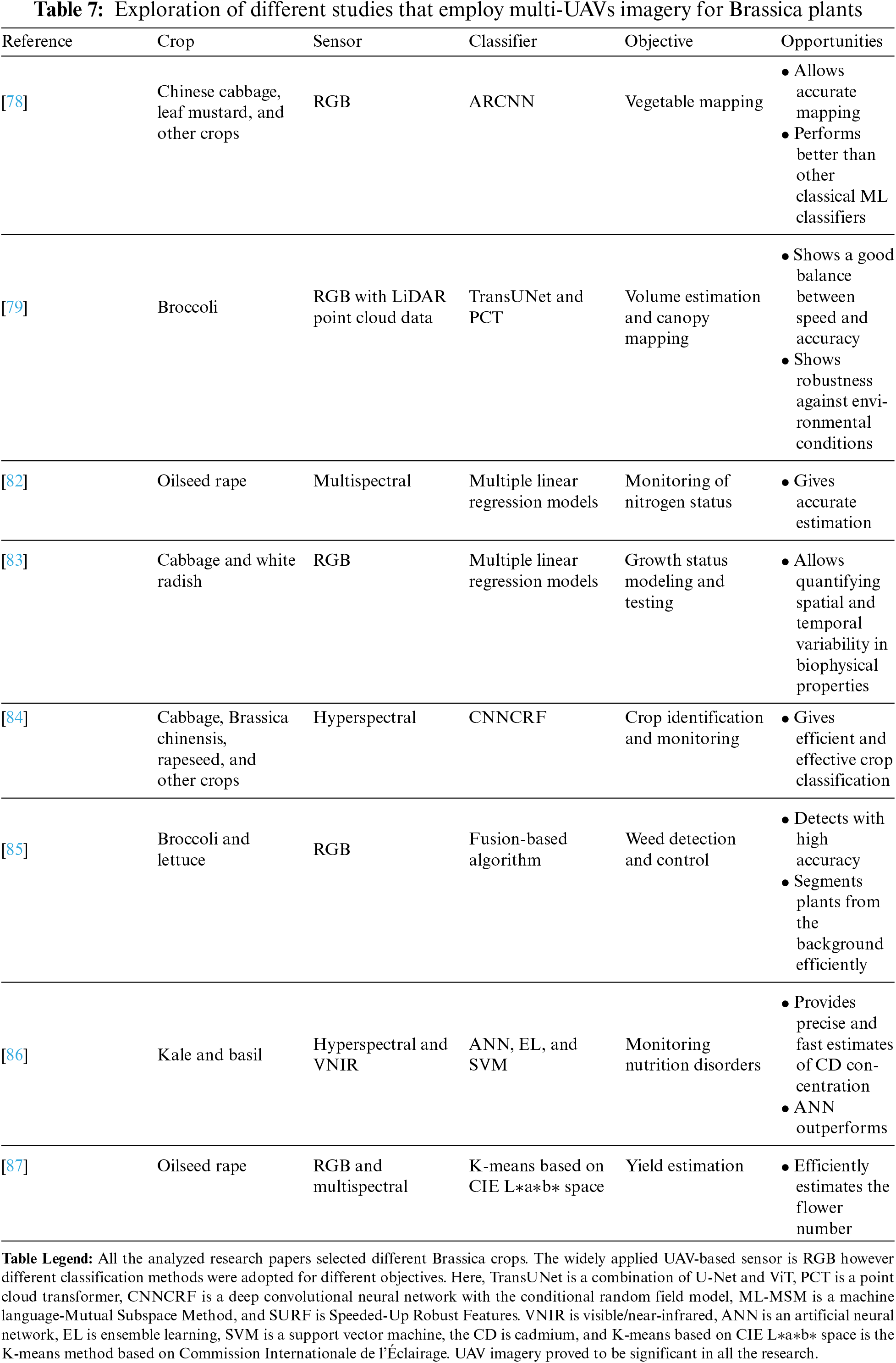
5.3.1 Brassica Growth Monitoring for Yield Estimation
Plants do not necessarily grow evenly throughout the fields. Production of Brassica varies from one place to another place in the fields. Several biotic and abiotic factors such as pests, water, soil, and others are responsible for these growth differences. Swarms can assess health, yield, and growth rates more easily than manual scouting or deploying a single UAV. Another study combined U-Net with ViT to form TransUNet for incorporating many layers in feature extraction for broccoli detection and characterization [79]. A point cloud transformer (PCT) network is also introduced for estimating broccoli heads. The applied framework shows a good balance between speed and accuracy with robustness against different environmental conditions.
5.3.2 Brassica Health Monitoring
Stress symptoms in Brassica can be observed in the infrared range far before their appearance in the visible range that can be observed through the naked eye. UAV swarms can easily capture these symptoms using the proposed multispectral sensor. Moreover, these images are less affected by low light and cloud cover. The multispectral sensor utilizes detailed information such as leaf thickness, chlorophyll levels, foreign contaminants, and others [80]. This enables Brassica health monitoring and management easier for the farmers at different growth stages.
5.3.3 Water Stress Monitoring and Irrigation Management of Brassica
Reduced availability of water for soil moisture causes water stress in Brassica plants. Different methods are adopted for monitoring water stress and irrigation management. However, these methods use proximal sensors for frequent observation of fields, which are expensive, time-consuming, and tedious. Using swarm UAV remote sensing accurate data can be captured that provides spatial variability of Brassica and field soil. Plant pixels in these obtained spatial resolution images must be separated from the background using DL classifiers. However, images must be captured carefully for the estimation of water stress in Brassica plants. Besides monitoring the flow of water in irrigation channels, UAV swarms are capable of sprinkling nutrients and water in Brassica farms in shorter timescales. For precise distribution of water, all the UAVs are attached with proper nozzles. Moreover, a swarm of UAVs conducts the sprinkle to handle the drought effects in Brassica fields [81].
5.3.4 Monitoring of Nutrition Disorders in Brassica
Nutrition disorders in plants can be determined by visually observing Brassica plant color, laboratory analysis of leaves, and other specific methods. Nevertheless, all these methods are time-consuming and do not provide an accurate estimation of nutritional issues. A swarm of UAVs is capable of providing ground sample distances (GSD) of Brassica with fewer operation issues as compared to single UAVs. Moreover, multispectral imaging delivers meaningful indices and features of these plants. In many cases, multispectral imaging provided better GSD at higher altitudes because of two reasons. First, Leaf Area Index (LAI) is more effectively integrated into low-resolution images. Secondly, blur is more intense if images are captured close to the Brassica plants. Along with this DL algorithms provide accurate nutrition status in these plants [82].
5.3.5 Disease Detection and Pest Management of Brassica
For pest detection, images must be clear enough to offer accurate disease detection, severity estimation, and environmental stress separation. However, the swarm of UAVs also requires significant spectral channels for detecting symptoms appropriately. For pest management of Brassica plants, a combination of spectral and textural data or a combination of different sensors provides promising results [88]. For site-specific operations of Brassica plants, swarm-captured images depend on temporal, spatial, and spectral resolutions. UAV swarms fly at lower altitudes to achieve higher spatial resolution for higher accuracy. Additionally, the swarm allows a more efficient distribution of pesticides than a single UAV. Swarms can detect hidden pests as well as spray pesticides in appropriate locations. Moreover, a swarm of UAVs is capable of releasing beneficial insects, parasites, and predators over crops for pest management.
5.3.6 Fertilizer and Pesticide Spraying
Maintaining the quality as well as production quantity of Brassica plants requires the application of fertilizers and pesticides. UAV swarms create high-resolution field maps of Brassica plants and then spray appropriate quantities of fertilizers and pesticides. Moreover, swarms evenly cover the areas as compared to deploying a single UAV that provides site-specific management of Brassica. Additionally, spraying through UAVs reduces the application of fertilizers and pesticides by 15%–20% and quickens the application procedure much faster than traditional procedures. This procedure will reduce the environmental effects of using pesticides and reduce the quantity of chemicals penetrating groundwater. Moreover, farmers using swarms are also less exposed to chemicals as compared to manual spraying [16].
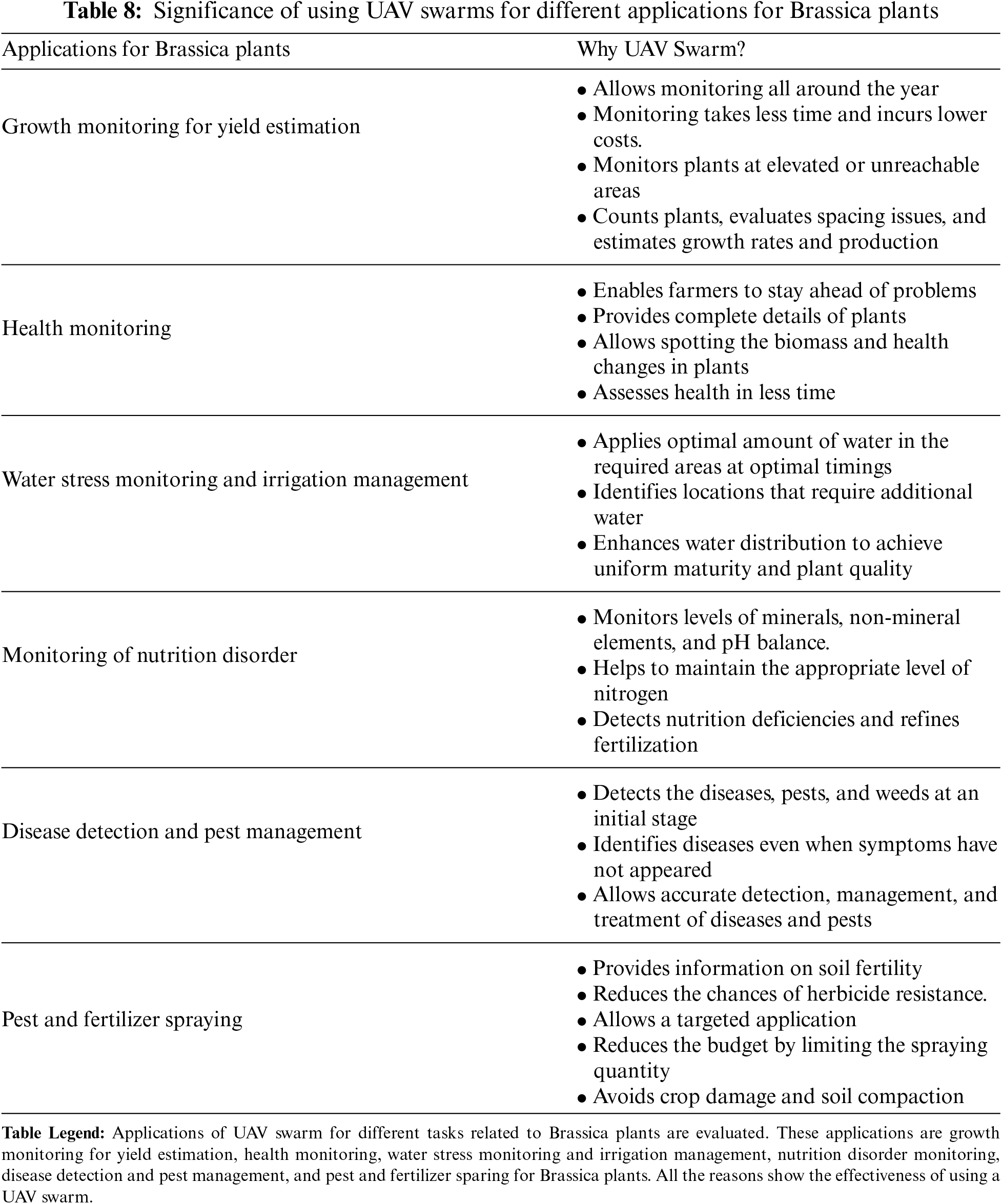
Table 8 shows why the UAV swarm is significant for various tasks related to Brassica plants. The most important features of UAV swarms show opportunities for their applications. These features include being less expensive, highly accurate, and efficient, saving time, providing better data, and assisting in troubleshooting problems. This table evaluates all the members of a swarm who work together to perform different tasks that enhance production, avoid, and save not only the crops but also the environment.
6 Challenges of UAV Swarm-Based Applications with Future Considerations
UAV swarms are inexpensive, effective, and persuasive for monitoring and disease detection in plants [89]. Although this study shows considerable benefits of using them for Brassica plants, their usage is slow due to some technical and deployment issues as shown in Fig. 7. These issues hinder the performance of UAV swarms and require future considerations. Some of these issues are discussed in this section.
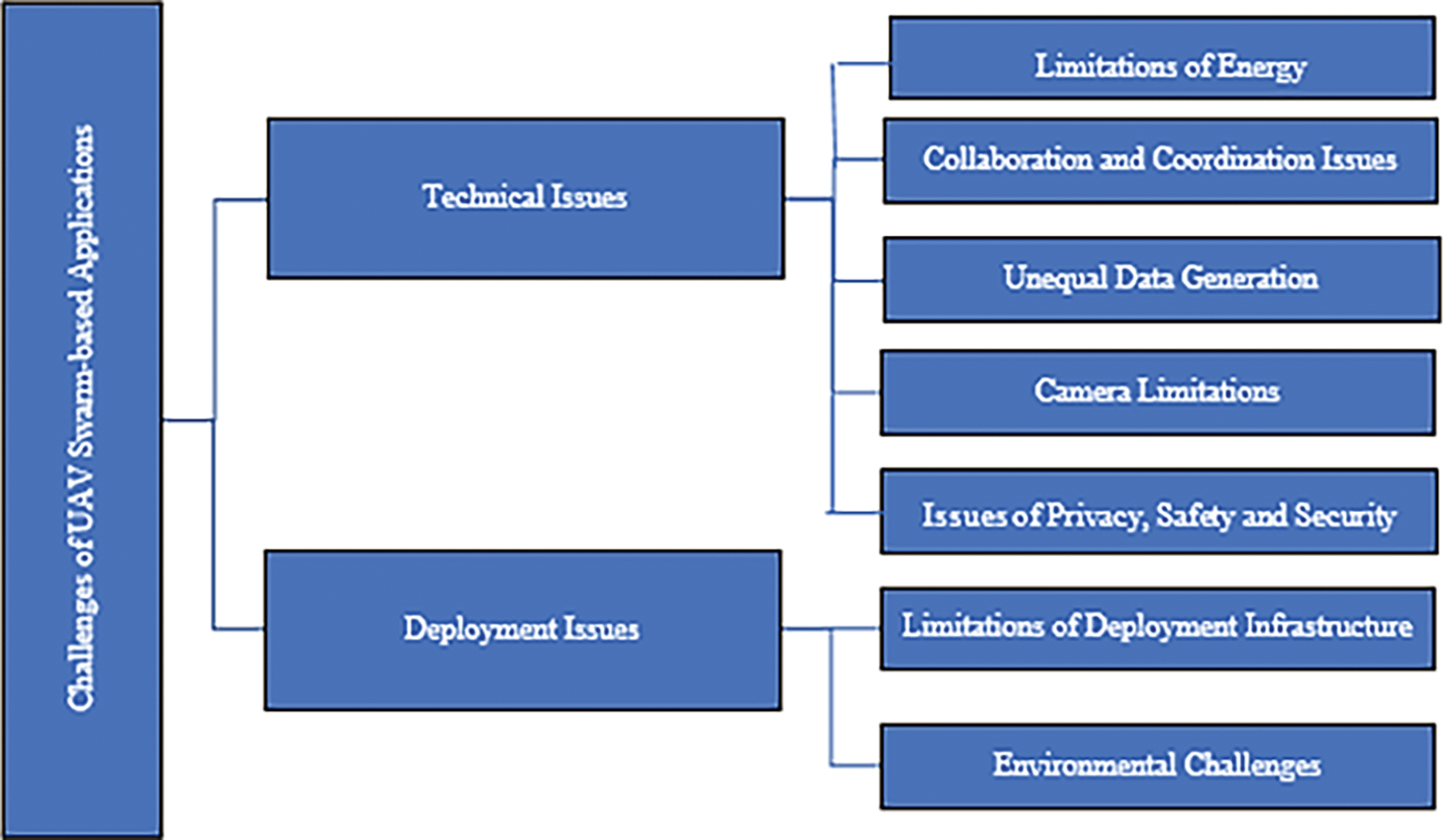
Figure 7: Prime challenges of UAV swarm-based applications are technical issues and deployment issues
The major constraint in swarm application is the restricted capacity of the onboard battery of all UAVs [90]. This limits the flying time and autonomy. Significant research is essential for designing improved battery endurance or rechargeable battery or introducing the concept of energy harvesting from the environment. The lying time of the swarms can also be increased by considering the scheduling and trade-off between all the UAVs of the swarm.
6.1.2 Collaboration and Coordination Issues
Another issue is collaboration and coordination among UAVs of a swarm [50]. Collaboration and coordination depend upon wireless communication networks. Moreover, decision-making and collision avoidance during field monitoring depend on the flow of information. Although cloud robotic systems (CRS) overcome this challenge and facilitate access to several kinds of shared data and resources. However, the Internet of Everything (IoE) must be considered for collecting, storing, and analyzing massive data generated by UAVs.
UAVs in a swarm generate massive and unequal data [91]. This leads to the under-utilization of computational resources. Therefore, data generated by different swarm members at a similar time is cross-checked and validated.
Each UAV in a swarm is equipped with lightweight digital cameras. These cameras may suffer from vignetting, images obtained through these cameras may have brighter central parts and darker edges. Therefore, these images require geometric, radiometric, and atmospheric calibrations. These calibrations can improve the quality of images and remove underexposed, overexposed, and blur effects from the images. As for monitoring and disease detection purposes, these camera limitations must be addressed appropriately [92].
6.1.5 Issues of Privacy, Safety, and Security of UAV Swarm
Issues of privacy are directly linked with localization. All the UAVs in a swarm pinpoint their location for path planning and safe landing. Global positioning system (GPS) signals are essential for navigation that becomes challenging in the inaccuracy or absence of GPS signals. Moreover, the exact location of the swarm users must be kept confidential to avoid hackers’ attacks. Cyberattacks and cybersecurity are still challenging issues for UAV swarms. Countermeasures and timely strategies are required to overcome these threats. Countermeasures for the identification of UAVs in a swarm to check whether the UAVs are legitimate or not are also needed [93].
6.2.1 Limitations of Deployment Infrastructure
Deployment infrastructure must include power, computing resources, and networking for Swarm applications [94]. Most rural areas do not offer all these requirements. Advanced scientific and engineering solutions must be the research focus to overcome rural infrastructure issues.
6.2.2 Environmental Challenges
Besides infrastructure, operational environments have adverse effects on long-term swarm deployment. Temperature, wind, and lightning all contribute to long-term deployment challenges and loss. Temperatures are usually high in fields that usually result in malfunction because of failure from UAVs, edge equipment, and networking hardware. This failure includes battery malfunctions, equipment overheating, network errors, and communication errors between multiple UAVs. Wind affects the flight time and power especially when it is blown against the direction of UAVs. For capturing clear images, UAVs, and farms both need to be stabilized. Therefore, UAVs must wait which exceeds time and increases battery drain. Lightning also has negative effects on the quality of images generated by UAVs. In low light or shadows, it is difficult to discern holes in leaves which leads to mispredictions [95].
For avoiding unnecessary energy consumption and mission failures, weather-aware models must be considered. Additionally, UAV swarms must be deployed with ample shade for equipment to avoid sun exposure. They must not be deployed in extreme temperatures. UAV swarms are required to fly in sustained winds and calm weather for conserving battery and maximizing mission lengths. Lastly, swarms must be deployed when the sun is high to mitigate the lightning effects.
This section discusses the major findings of this review paper. All the observed findings are stated point-by-point.
• Extensive details on the kinds of Brassica plants are discussed among which the widely studied ones are rapeseed, Chinese cabbage, cabbage, and broccoli.
• Clubroot, Blackleg, Stem Rot, Turnip Mosaic Virus, Blackrot, Downy Mildew, Fusarium Wilt, and Alternaria Leaf Spot are the core diseases explained. Several factors that cause these diseases are unfavorable weather conditions, poor quality fertilizers and irrigation facilities, unfair water distribution, exhaustion of the soil, and many others.
• The traditional disease detection methods are complex, time-consuming, require high cost and experts, and do not validate for real-time applications. Analysis of several studies highlights that UAV swarms are effective for data collection as they are easily available and budget-friendly and solve the VI problems of Brassica plants.
• Swarms of UAVs can provide sufficient information and observations more efficiently than single UAVs or fixed-point field experiments run by different agricultural institutions.
• UAVs require remote sensing cameras and sensors such as RGB, multispectral, hyperspectral, infrared thermography, and fluorescence imaging. Comparative analysis of different studies shows that RGB, hyperspectral, and multispectral imaging are more significant and widely employed by researchers.
• It is observed that multiple image processing steps provide evasive interpretation of images required for monitoring, non-destructive assessment of plant status, and evaluation of valuable information about developmental stages and growth rates.
• ML is a cutting-edge technology that can be applied for classification and object detection in UAV-generated images. All ML techniques possess certain advantages and disadvantages.
• Integration of optimizers enhances the parameters and improves the training and recognition ability of ML models. These ML techniques are selected according to the targeted crop type, the data size, and the application.
• The current CNN architectures are widely employed by researchers as they classify plant images more efficiently than ML techniques. However, these CNN models require large memory and powerful GPUs. Therefore, these models based on several trainable layers are not considered the best choice for real-time applications.
• With the recent advancements, lightweight models are suggested such as the different versions of YOLO and ViT models that show superiority in terms of accuracy and computational efficiency over CNNs. Moreover, these algorithms detect diseases and pests, monitor plants, make the optimal decision regarding agrochemical inputs, and determine the best time for harvesting, and managing nutrients and water.
• Limitations of energy, collaboration and coordination issues, unequal data generation, camera limitations, and issues of privacy, safety, and security are the prime technical issues that restrict the UAV swarm application. Moreover, limitations of deployment infrastructure and environmental challenges also require future considerations.
In the current era, the agriculture sector plays a key role in the economy for the development of a country. The population growth of the country as well as the economy can face huge losses if the plants are not monitored properly or if the diseases harm them. The main purpose of this review paper is to promote effective monitoring and early disease diagnosis of Brassica plants using UAV swarms. To provide a comprehensive study, this paper covers the maximum research domains for Brassica plants. Various kinds of Brassica plants are evaluated, many fungal, viral, and bacterial diseases are discussed, and different disease detection methods are explained. UAV swarm approach, various remote sensing cameras and sensors, and image analysis techniques are elaborated. Classical to state-of-the-art machine learning approaches are detailed along with their advantages and disadvantages. It is observed that researchers have applied standalone AI techniques as well as hybrid AI techniques, however, the hybrid techniques show better performances. Therefore, based on these findings we may conclude that AI-based UAV swarms are advantageous for monitoring growth, health, water stress, and nutrition disorders, management of irrigation and pest, detection of diseases, and spraying of fertilizers and pesticides on Brassica plants. Certain technical and deployment challenges that hinder UAV swarm applications along with future considerations are also explored. A comparative analysis with existing review papers is also conducted that shows the significance of this review paper.
This paper suggests that more integration efforts are required related to swarm, remote sensors, and classification models. The discussed shortcomings of UAV swam-based applications must be considered not only to optimize their applications but also for a sustainable economy and food security. Additionally, we recommend the RGB cameras as budget-friendly cameras and hyperspectral imaging for future field analysis. More improved learning models are needed to assess the quality of plants and detect diseases with mild symptoms or no determined shape of lesions. The limitation of this review paper is that the focus is on only optical cameras and sensors, and Brassica plants. In our future work, we will focus on other sensors such as soil moisture sensors and other plants. Furthermore, we will propose an improved DL model and a sensor for disease identification with high accuracy.
Acknowledgement: This review paper is supported by the School of Physics and Electronic Engineering, Jiaying University, Meizhou, China.
Funding Statement: The above research is funded by Jiaying University Hong Kong, Macao and Taiwan doctoral talent start-up project fund having grant number is 2023WRC05.
Author Contributions: The authors confirm the contribution to the paper as follows: study conception: Zain Anwar Ali, Muhammad Aaamir Khan; data collection: Dingnan Deng; analysis and writing: Muhammad Kashif Shaikh and Raza Hasan. Revisions were done by Zain Anwar Ali and Raza Hasan. All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The authors confirm that the data supporting the findings of this study are available within the article.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. P. Radoglou-Grammatikis, P. Sarigiannidis, T. Lagkas and I. Moscholios, “A compilation of UAV applications for precision agriculture,” Computer Networks, vol. 172, pp. 107148–107165, 2020. [Google Scholar]
2. C. J. Kim, W. T. Jeong, K. S. Kyung, H. D. Lee, D. Kim et al., “Dissipation and distribution of picarbutrazox residue following spraying with an unmanned aerial vehicle on Chinese cabbage (Brassica campestris var. pekinensis),” Molecules, vol. 26, no. 18, pp. 5671–5681, 2021. [Google Scholar] [PubMed]
3. H. F. D. Al-Lami, M. P. You, S. S. Banga and M. J. Barbetti, “Novel resistances provide new avenues to manage alternaria leaf spot (Alternaria brassicae) in canola (Brassica napusmustard (B. junceaand other brassicaceae crops,” Plant Disease, vol. 107, no. 2, pp. 372–381, 2023. [Google Scholar] [PubMed]
4. D. H. Lee, H. S. Shin and J. H. Park, “Developing a p-NDVI map for highland kimchi cabbage using spectral information from UAVs and a field spectral radiometer,” Agronomy, vol. 10, no. 11, pp. 1798–1816, 2020. [Google Scholar]
5. A. J. Hati and R. R. Singh, “Smart indoor farms: Leveraging technological advancements to power a sustainable agricultural revolution,” AgriEngineering, vol. 3, no. 4, pp. 728–767, 2021. [Google Scholar]
6. Z. A. Ali, C. Yang, A. Israr and Q. Zhu, “A comprehensive review of scab disease detection on Rosaceae family fruits via UAV imagery,” Drones, vol. 7, no. 2, pp. 97–128, 2023. [Google Scholar]
7. X. Guo, Y. K. Ahlawat, T. Liu and A. Zare, “Evaluation of postharvest senescence of Broccoli via hyperspectral imaging,” Plant Phenomics, vol. 2022, pp. 95–106, 2022. [Google Scholar]
8. A. Rajbongshi, M. E. Islam, M. J. Mia, T. I. Sakif and A. Majumder, “A comprehensive investigation to cauliflower diseases recognition: An automated machine learning approach,” International Journal on Advanced Science Engineering and Information Technology, vol. 12, no. 1, pp. 32–41, 2022. [Google Scholar]
9. Z. Ye, K. Yang, Y. Lin, S. Guo, Y. Sun et al., “A comparison between pixel-based deep learning and object-based image analysis (OBIA) for individual detection of cabbage plants based on UAV visible-light images,” Computers and Electronics in Agriculture, vol. 209, pp. 107822–107836, 2023. [Google Scholar]
10. X. E. Pantazi, D. Moshou and A. A. Tamouridou, “Automated leaf disease detection in different crop species through image features analysis and one class classifiers,” Computers and Electronics in Agriculture, vol. 156, pp. 96–104, 2019. [Google Scholar]
11. A. Mukherjee, S. Misra and N. S. Raghuwanshi, “A survey of unmanned aerial sensing solutions in precision agriculture,” Journal of Network and Computer Applications, vol. 148, pp. 102461–102517, 2019. [Google Scholar]
12. E. A. Abioye, M. S. Z. Abidin, M. S. A. Mahmud, S. Buyamin, M. H. I. Ishak et al., “A review on monitoring and advanced control strategies for precision irrigation,” Computers and Electronics in Agriculture, vol. 173, pp. 105441–105462, 2020. [Google Scholar]
13. T. Gill, S. K. Gill, D. K. Saini, Y. Chopra, J. P. de Koff et al., “A comprehensive review of high throughput phenotyping and machine learning for plant stress phenotyping,” Phenomics, vol. 2, no. 3, pp. 156–183, 2022. [Google Scholar] [PubMed]
14. H. Chen, Y. Lan, B. K. Fritz, W. C. Hoffmann and S. Liu, “Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV),” International Journal of Agricultural and Biological Engineering, vol. 14, no. 1, pp. 38–49, 2021. [Google Scholar]
15. C. Qu, J. Boubin, D. Gafurov, J. Zhou, N. Aloysius et al., “UAV swarms in smart agriculture: Experiences and opportunities,” in The 18th Int. Conf. on e-Science (e-Science), IEEE, pp. 148–158, 2022. [Google Scholar]
16. A. Hafeez, M. A. Husain, S. P. Singh, A. Chauhan, M. T. Khan et al., “Implementation of drone technology for farm monitoring & pesticide spraying: A review,” Information Processing in Agriculture, vol. 10, no. 2, pp. 192–203, 2022. [Google Scholar]
17. L. Zou, W. K. Tan, Y. Du, H. W. Lee, X. Liang et al., “Nutritional metabolites in Brassica rapa subsp. chinensis var. parachinensis (choy sum) at three different growth stages: Microgreen, seedling and adult plant,” Food Chemistry, vol. 357, pp. 129535–129543, 2021. [Google Scholar] [PubMed]
18. B. Jagadeesh, S. K. Maurya, P. Hemalatha and A. Lingam, “Diseases and disorders of cole crops (stem brassicas) and their management,” Diseases of Horticultural Crops, vol. 2, pp. 79–129, 2022. [Google Scholar]
19. P. Palukaitis and S. Kim, “Resistance to turnip mosaic virus in the family brassicaceae,” The Plant Pathology Journal, vol. 37, no. 1, pp. 1–23, 2021. [Google Scholar] [PubMed]
20. R. K. Shaw, Y. Shen, J. Wang, X. Sheng, Z. Zhao et al., “Advances in multi-omics approaches for molecular breeding of black rot resistance in Brassica oleracea L,” Frontiers in Plant Science, vol. 12, pp. 742553–742586, 2021. [Google Scholar] [PubMed]
21. N. Lipková, J. Medo, R. Artimová, J. Maková, J. Petrová et al., “Growth promotion of rapeseed (Brassica napus L.) and blackleg disease (Leptosphaeria maculans) suppression mediated by endophytic bacteria,” Agronomy, vol. 11, no. 10, pp. 1966–1983, 2021. [Google Scholar]
22. L. N. Ding, T. Li, X. J. Guo, M. Li, X. Y. Liu et al., “Sclerotinia stem rot resistance in rapeseed: Recent progress and future prospects,” Journal of Agricultural and Food Chemistry, vol. 69, no. 10, pp. 2965–2978, 2021. [Google Scholar] [PubMed]
23. X. Feng, S. P. Li, Y. F. Lu, J. J. Zhang, Y. Y. Zhu et al., “Bjerkandera adusta M1 inhibits the growth of Fusarium oxysporum f. sp. conglutinans and fusarium wilt incidence in Brassica napus L,” Journal of Plant Pathology, vol. 103, no. 2, pp. 483–491, 2021. [Google Scholar]
24. B. Zhang, T. Su, P. Li, X. Xin, Y. Cao et al., “Identification of long noncoding RNAs involved in resistance to downy mildew in Chinese cabbage,” Horticulture Research, vol. 8, pp. 44–58, 2021. [Google Scholar] [PubMed]
25. J. Hasan, S. Megha and H. Rahman, “Clubroot in Brassica: Recent advances in genomics, breeding, and disease management,” Genome, vol. 64, no. 8, pp. 735–760, 2021. [Google Scholar] [PubMed]
26. L. M. Nyochembeng, “Enhancing seed health for organic vegetable production systems: Challenges and opportunities,” Journal of Agricultural Science, vol. 13, no. 12, pp. 35–42, 2021. [Google Scholar]
27. K. D. Singh, H. S. N. Duddu, S. Vail, I. Parkin and S. J. Shirtliffe, “UAV-Based hyperspectral imaging technique to estimate canola (Brassica napus L.) seedpods maturity,” Canadian Journal of Remote Sensing, vol. 47, no. 1, pp. 33–47, 2021. [Google Scholar]
28. A. Terentev, V. Dolzhenko, A. Fedotov and D. Eremenko, “Current state of hyperspectral remote sensing for early plant disease detection: A review,” Sensors, vol. 22, no. 3, pp. 757–387, 2022. [Google Scholar] [PubMed]
29. R. Indrakumari, T. Poongodi, S. Khaitan, S. Sagar and B. Balamurugan, “A review on plant diseases recognition through deep learning,” in Handbook of Deep Learning in Biomedical Engineering, Academic Press, pp. 219–244, 2021. [Google Scholar]
30. S. I. Cheema, M. Ahmad, R. Ullah, R. A. Mothana, O. M. Noman et al., “Implication, visualization, and characterization through scanning electron microscopy as a tool to identify nonedible oil seeds,” Microscopy Research and Technique, vol. 84, no. 3, pp. 379–393, 2021. [Google Scholar] [PubMed]
31. R. Kiran, P. Kumar, J. Akhtar, K. Nair and S. C. Dubey, “Development of multiplex PCR assay for detection of Alternaria brassicae, A. brassicicola and Xanthomonas campestris pv. campestris in crucifers,” Archives of Microbiology, vol. 204, no. 4, pp. 224, 2022. [Google Scholar] [PubMed]
32. D. Dev, A. K. Tewari, P. Upadhyay and G. R. Daniel, “Identification and nomenclature of Albugo candida pathotypes of Indian origin causing white rust disease of rapeseed-mustard,” European Journal of Plant Pathology, vol. 158, pp. 987–1004, 2020. [Google Scholar]
33. X. Lu, L. Zhang, W. Huang, S. Zhang, S. Zhang et al., “Integrated volatile metabolomics and transcriptomics analyses reveal the influence of infection TuMV to volatile organic compounds in Brassica rapa,” Horticulturae, vol. 8, no. 1, pp. 57–73, 2022. [Google Scholar]
34. J. S. Yang, H. W. Lee, H. Song and J. H. Ha, “Volatile metabolic markers for monitoring Pectobacterium carotovorum subsp. carotovorum using headspace solid-phase microextraction coupled with gas chromatography-mass spectrometry,” Journal of Microbiology and Biotechnology, vol. 31, no. 1, pp. 70–78, 2021. [Google Scholar] [PubMed]
35. R. Zhao and F. Shi, “A novel strategy for pest disease detection of Brassica chinensis based on UAV imagery and deep learning,” International Journal of Remote Sensing, vol. 43, no. 19–24, pp. 7083–7103, 2022. [Google Scholar]
36. K. Dutta, D. Talukdar and S. S. Bora, “Segmentation of unhealthy leaves in cruciferous crops for early disease detection using vegetative indices and Otsu thresholding of aerial images,” Measurement, vol. 189, pp. 110478, 2022. [Google Scholar]
37. N. K. Gogoi, B. Deka and L. C. Bora, “Remote sensing and its use in detection and monitoring plant diseases: A review,” Agricultural Reviews, vol. 39, no. 4, pp. 307–313, 2018. [Google Scholar]
38. X. G. Zhou, D. Zhang and F. Lin, “UAV remote sensing: An innovative tool for detection and management of rice diseases,” Diagnostics of Plant Diseases, vol. 95535, pp. 43–67, 2021. [Google Scholar]
39. Y. Huang, Q. Ma, X. Wu, H. Li, K. Xu et al., “Estimation of chlorophyll content in Brassica napus based on unmanned aerial vehicle images,” Oil Crop Science, vol. 7, no. 3, pp. 149–155, 2022. [Google Scholar]
40. N. Jamil, G. Kootstra and L. Kooistra, “Evaluation of individual plant growth estimation in an intercropping field with UAV imagery,” Agriculture, vol. 12, no. 1, pp. 102–124, 2022. [Google Scholar]
41. H. Zhang, L. Wang, T. Tian and J. Yin, “A review of unmanned aerial vehicle low-altitude remote sensing (UAV-LARS) use in agricultural monitoring in China,” Remote Sensing, vol. 13, no. 6, pp. 1221–1237, 2021. [Google Scholar]
42. C. Zhang, Z. Xie, J. Shang, J. Liu, T. Dong et al., “Detecting winter canola (Brassica napus) phenological stages using an improved shape-model method based on time-series UAV spectral data,” The Crop Journal, vol. 10, no. 5, pp. 1353–1362, 2022. [Google Scholar]
43. V. Lukas, I. Huňady, A. Kintl, J. Mezera, T. Hammerschmiedt et al., “Using UAV to identify the optimal vegetation index for yield prediction of oil seed rape (Brassica napus L.) at the flowering stage,” Remote Sensing, vol. 14, no. 19, pp. 4953–4972, 2022. [Google Scholar]
44. J. Liu, J. Xiang, Y. Jin, R. Liu, J. Yan et al., “Boost precision agriculture with unmanned aerial vehicle remote sensing and edge intelligence: A survey,” Remote Sensing, vol. 13, no. 21, pp. 4387–4417, 2021. [Google Scholar]
45. T. Astor, S. Dayananda, S. Nautiyal and M. Wachendorf, “Vegetable crop biomass estimation using hyperspectral and RGB 3D UAV data,” Agronomy, vol. 10, no. 10, pp. 1600–1615, 2020. [Google Scholar]
46. A. Al Aasmi, K. E. Alordzinu, J. Li, Y. Lan, S. A. Appiah et al., “Rapid estimation of water stress in choy sum (Brassica chinensis var. parachinensis) using integrative approach,” Sensors, vol. 22, no. 5, pp. 1695–1711, 2022. [Google Scholar] [PubMed]
47. I. Borra-Serrano, K. V. Laere, P. Lootens and L. Leus, “Breeding and selection of nursery plants assisted by high-throughput field phenotyping using UAV imagery: Case studies with sweet box (Sarcococca) and garden rose (Rosa),” Horticulturae, vol. 8, no. 12, pp. 1186–1202, 2022. [Google Scholar]
48. X. Liu, L. Guanter, L. Liu, A. Damm, Z. Malenovský et al., “Downscaling of solar-induced chlorophyll fluorescence from canopy level to photosystem level using a random forest model,” Remote Sensing of Environment, vol. 231, pp. 110772–110789, 2019. [Google Scholar]
49. K. Prabha, “Disease sniffing robots to apps fixing plant diseases: Applications of artificial intelligence in plant pathology—A mini review,” Indian Phytopathology, vol. 74, no. 1, pp. 13–20, 2021. [Google Scholar]
50. L. F. P. Oliveira, A. P. Moreira and M. F. Silva, “Advances in agriculture robotics: A state-of-the-art review and challenges ahead,” Robotics, vol. 10, no. 2, pp. 52–82, 2021. [Google Scholar]
51. M. Iswan, M. G. Suryanata, D. H. Pane, K. Ibnutama and R. F. Wijaya, “Application of artificial intelligence in the detection of plant diseases (Clubroot),” Jurnal Teknologi dan Open Source, vol. 5, no. 1, pp. 73–80, 2022. [Google Scholar]
52. L. Wei, M. Yu, Y. Liang, Z. Yuan, C. Huang et al., “Precise crop classification using spectral-spatial-location fusion based on conditional random fields for UAV-borne hyperspectral remote sensing imagery,” Remote Sensing, vol. 11, no. 17, pp. 2011–2031, 2019. [Google Scholar]
53. I. Sinde-González, J. P. Gómez-López, S. A. Tapia-Navarro, E. Murgueitio, C. Falconí et al., “Determining the effects of nanonutrient application in cabbage (Brassica oleracea var. capitate L.) using spectrometry and biomass estimation with UAV,” Agronomy, vol. 12, no. 1, pp. 81–99, 2021. [Google Scholar]
54. P. Fraccaro, J. Butt, B. Edwards, R. P. Freckleton, D. Z. Childs et al., “A deep learning application to map weed spatial extent from unmanned aerial vehicles imagery,” Remote Sensing, vol. 14, no. 17, pp. 4197–4211, 2022. [Google Scholar]
55. Y. Jo, S. Lee, Y. Lee, H. Kahng, S. Park et al., “Semantic segmentation of cabbage in the South Korea highlands with images by unmanned aerial vehicles,” Applied Sciences, vol. 11, no. 10, pp. 4493–4510, 2021. [Google Scholar]
56. J. Carreras, Y. Y. Kikuti, M. Miyaoka, S. Hiraiwa, S. Tomita et al., “A combination of multilayer perceptron, radial basis function artificial neural networks and machine learning image segmentation for the dimension reduction and the prognosis assessment of diffuse large B-cell lymphoma,” AI, vol. 2, no. 1, pp. 106–134, 2021. [Google Scholar]
57. J. Chen, F. Ling, Y. Zhang, T. You, Y. Liu et al., “Coverage path planning of heterogeneous unmanned aerial vehicles based on ant colony system,” Swarm and Evolutionary Computation, vol. 69, pp. 101005, 2022. [Google Scholar]
58. S. K. Mahmud, “Reinforcement learning empowered unmanned aerial vehicle assisted internet of things networks,” Ph.D. dissertation, Queen Mary University of London, UK, 2023. [Google Scholar]
59. A. Salam, Q. Javaid and M. Ahmad, “Bio-inspired cluster–based optimal target identification using multiple unmanned aerial vehicles in smart precision agriculture,” International Journal of Distributed Sensor Networks, vol. 17, no. 7, pp. 15501477211034071–15501477211034087, 2021. [Google Scholar]
60. P. Vasavi, A. Punitha and T. V. N. Rao, “Crop leaf disease detection and classification using machine learning and deep learning algorithms by visual symptoms: A review,” International Journal of Electrical and Computer Engineering, vol. 12, no. 2, pp. 2079–2086, 2022. [Google Scholar]
61. P. Ong, K. S. Teo and C. K. Sia, “UAV-based weed detection in Chinese cabbage using deep learning,” Smart Agricultural Technology, vol. 4, pp. 100181–100188, 2023. [Google Scholar]
62. A. I. ElManawy, D. Sun, A. Abdalla, Y. Zhu and H. Cen, “HSI-PP: A flexible open-source software for hyperspectral imaging-based plant phenotyping,” Computers and Electronics in Agriculture, vol. 200, pp. 107248, 2022. [Google Scholar]
63. A. Mateo-Aroca, G. García-Mateos, A. Ruiz-Canales, J. M. Molina-García-Pardo and J. M. Molina-Martínez, “Remote image capture system to improve aerial supervision for precision irrigation in agriculture,” Water, vol. 11, no. 2, pp. 255–275, 2019. [Google Scholar]
64. C. Huang, H. L. Wei, J. Y. Rau and J. P. Jhan, “Use of principal components of UAV-acquired narrow-band multispectral imagery to map the diverse low stature vegetation fAPAR,” GIScience & Remote Sensing, vol. 56, no. 4, pp. 605–623, 2019. [Google Scholar]
65. B. Wang, J. Sun, L. Xia, J. Liu, Z. Wang et al., “The applications of hyperspectral imaging technology for agricultural products quality analysis: A review,” Food Reviews International, vol. 39, no. 2, pp. 1–20, 2021. [Google Scholar]
66. V. Psiroukis, B. Espejo-Garcia, A. Chitos, A. Dedousis, K. Karantzalos et al., “Assessment of different object detectors for the maturity level classification of broccoli crops using UAV imagery,” Remote Sensing, vol. 14, no. 3, pp. 731–750, 2022. [Google Scholar]
67. C. Zhou, J. Hu, Z. Xu, J. Yue, H. Ye et al., “A monitoring system for the segmentation and grading of broccoli head based on deep learning and neural networks,” Frontiers in Plant Science, vol. 11, pp. 402–414, 2020. [Google Scholar] [PubMed]
68. X. Hao, J. Jia, W. Gao, X. Guo, W. Zhang et al., “MFC-CNN: An automatic grading scheme for light stress levels of lettuce (Lactuca sativa L.) leaves,” Computers and Electronics in Agriculture, vol. 179, pp. 105847–105858, 2020. [Google Scholar]
69. G. J. S. Carmo, R. Castoldi, G. D. Martins, A. C. P. Jacinto, N. D. Tebaldi et al., “Detection of lesions in lettuce caused by Pectobacterium carotovorum subsp. carotovorum by supervised classification using multispectral images,” Canadian Journal of Remote Sensing, vol. 48, no. 2, pp. 144–157, 2022. [Google Scholar]
70. X. Zhou, W. Zhou, X. Fu, Y. Hu and J. Liu, “MDvT: Introducing mobile three-dimensional convolution to a vision transformer for hyperspectral image classification,” International Journal of Digital Earth, vol. 16, no. 1, pp. 1469–1490, 2023. [Google Scholar]
71. J. Li, E. Wang, J. Qiao, Y. Li, L. Li et al., “Automatic rape flower cluster counting method based on low-cost labelling and UAV-RGB images,” Plant Methods, vol. 19, no. 1, pp. 1–19, 2023. [Google Scholar]
72. Z. Xie, S. Chen, G. Gao, H. Li, X. Wu et al., “Evaluation of rapeseed flowering dynamics for different genotypes with UAV platform and machine learning algorithm,” Precision Agriculture, vol. 23, no. 5, pp. 1688–1706, 2022. [Google Scholar]
73. P. Gao, Y. Zhang, L. Zhang, R. Noguchi and T. Ahamed, “Development of a recognition system for spraying areas from unmanned aerial vehicles using a machine learning approach,” Sensors, vol. 19, no. 2, pp. 313–329, 2019. [Google Scholar] [PubMed]
74. A. Bouguettaya, H. Zarzour, A. Kechida and A. M. Taberkit, “Deep learning techniques to classify agricultural crops through UAV imagery: A review,” Neural Computing and Applications, vol. 34, no. 12, pp. 9511–9536, 2022. [Google Scholar] [PubMed]
75. M. Ouhami, A. Hafiane, Y. Es-Saady, M. El Hajji and R. Canals, “Computer vision, IoT and data fusion for crop disease detection using machine learning: A survey and ongoing research,” Remote Sensing, vol. 13, no. 13, pp. 2486–2509, 2021. [Google Scholar]
76. X. Zhao, Y. Li, Y. Chen, X. Qiao and W. Qian, “Water chlorophyll a estimation using UAV-based multispectral data and machine learning,” Drones, vol. 7, no. 1, pp. 2–18, 2023. [Google Scholar]
77. D. Rajković, A. M. Jeromela, L. Pezo, B. Lončar, F. Zanetti et al., “Yield and quality prediction of winter rapeseed—Artificial neural network and random forest models,” Agronomy, vol. 12, no. 1, pp. 58–72, 2021. [Google Scholar]
78. Q. Feng, J. Yang, Y. Liu, C. Ou, D. Zhu et al., “Multi-temporal unmanned aerial vehicle remote sensing for vegetable mapping using an attention-based recurrent convolutional neural network,” Remote Sensing, vol. 12, no. 10, pp. 1668–1689, 2020. [Google Scholar]
79. C. Zhou, H. Ye, D. Sun, J. Yue, G. Yang et al., “An automated, high-performance approach for detecting and characterizing broccoli based on UAV remote-sensing and transformers: A case study from Haining, China,” International Journal of Applied Earth Observation and Geoinformation, vol. 114, pp. 103055–103066, 2022. [Google Scholar]
80. E. Omia, H. Bae, E. Park, M. S. Kim, I. Baek et al., “Remote sensing in field crop monitoring: A comprehensive review of sensor systems, data analyses and recent advances,” Remote Sensing, vol. 15, no. 2, pp. 354–399, 2023. [Google Scholar]
81. N. Delavarpour, C. Koparan, J. Nowatzki and S. Bajwa, “A technical study on UAV characteristics for precision agriculture applications and associated practical challenges,” Remote Sensing, vol. 13, no. 6, pp. 1204–1228, 2021. [Google Scholar]
82. S. Liu, L. Li, W. Gao, Y. Zhang, Y. Liu et al., “Diagnosis of nitrogen status in winter oilseed rape (Brassica napus L.) using in-situ hyperspectral data and unmanned aerial vehicle (UAV) multispectral images,” Computers and Electronics in Agriculture, vol. 151, pp. 185–195, 2018. [Google Scholar]
83. D. W. Kim, H. S. Yun, S. J. Jeong, Y. S. Kwon, S. G. Kim et al., “Modeling and testing of growth status for Chinese cabbage and white radish with UAV-based RGB imagery,” Remote Sensing, vol. 10, no. 4, pp. 563–587, 2018. [Google Scholar]
84. Y. Zhong, X. Hu, C. Luo, X. Wang, J. Zhao et al., “WHU-Hi: UAV-borne hyperspectral with high spatial resolution (H2) benchmark datasets and classifier for precise crop identification based on deep convolutional neural network with CRF,” Remote Sensing of Environment, vol. 250, pp. 112012–112016, 2020. [Google Scholar]
85. J. Gai, L. Tang and B. L. Steward, “Automated crop plant detection based on the fusion of color and depth images for robotic weed control,” Journal of Field Robotics, vol. 37, no. 1, pp. 35–52, 2020. [Google Scholar]
86. A. Souza, M. Z. Rojas, Y. Yang, L. Lee and L. Hoagland, “Classifying cadmium contaminated leafy vegetables using hyperspectral imaging and machine learning,” Heliyon, vol. 8, no. 12, pp. e12256, 2022. [Google Scholar] [PubMed]
87. L. Wan, Y. Li, H. Cen, J. Zhu, W. Yin et al., “Combining UAV-based vegetation indices and image classification to estimate flower number in oilseed rape,” Remote Sensing, vol. 10, no. 9, pp. 1484–1501, 2018. [Google Scholar]
88. J. Kaivosoja, J. Hautsalo, J. Heikkinen, L. Hiltunen, P. Ruuttunen et al., “Reference measurements in developing UAV systems for detecting pests, weeds, and diseases,” Remote Sensing, vol. 13, no. 7, pp. 1238–1258, 2021. [Google Scholar]
89. N. Telagam, N. Kadasamy and M. A. Kumar, “Review on smart farming and smart agriculture for society: Post-pandemic era,” Green Technological Innovation for Sustainable Smart Societies: Post Pandemic Era, pp. 233–256, 2021. [Google Scholar]
90. M. Lumini, “Pherodrone1. 0: An innovative inflatable UAV’s concept, inspired by Zanonia macrocarpa’s samara flying-wing and to insect’s sensillae, designed for the biological control of harmful insects in PA (precision agriculture),” Bionics and Sustainable Design, pp. 225–287, 2022. [Google Scholar]
91. S. Kumar, R. S. Meena, S. Sheoran, C. K. Jangir, M. K. Jhariya et al., “Remote sensing for agriculture and resource management,” in Natural Resources Conservation and Advances for Sustainability, Elsevier, pp. 91–135, 2022. [Google Scholar]
92. L. Emmi, E. Le Flécher, V. Cadenat and M. Devy, “A hybrid representation of the environment to improve autonomous navigation of mobile robots in agriculture,” Precision Agriculture, vol. 22, pp. 524–549, 2021. [Google Scholar]
93. B. D. Grieve, T. Duckett, M. Collison, L. Boyd, J. West et al., “The challenges posed by global broadacre crops in delivering smart agri-robotic solutions: A fundamental rethink is required,” Global Food Security, vol. 23, pp. 116–124, 2019. [Google Scholar]
94. M. Wakchaure, B. K. Patle and A. K. Mahindrakar, “Application of AI techniques and robotics in agriculture: A review,” Artificial Intelligence in the Life Sciences, vol. 3, pp. 100057–100081, 2023. [Google Scholar]
95. J. Boubin, Z. Zhang, J. Chumley and C. Stewart, “Adaptive deployment for autonomous agricultural UAV swarms,” in 20th ACM Conf. on Embedded Networked Sensor Systems (SenSys’22), pp. 14, 2022. [Google Scholar]
Cite This Article
 Copyright © 2024 The Author(s). Published by Tech Science Press.
Copyright © 2024 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools