
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Numerical Investigation of Load Generation in U-Shaped Aqueducts under Lateral Excitation: Part I—First-Order Resonant Sloshing
1 Department of Bridge Engineering, School of Civil Engineering, Southwest Jiaotong University, Chengdu, 610031, China
2 Aseismic Engineering Technology Key Laboratory of Sichuan Province, Chengdu, 610031, China
3 Key Laboratory of Xinjiang Coal Resources Green Mining, Ministry of Education, Urumqi, 830023, China
4 Xinjiang Institute of Engineering, Urumqi, 860023, China
* Corresponding Author: Wanli Yang. Email:
Fluid Dynamics & Materials Processing 2025, 21(11), 2673-2700. https://doi.org/10.32604/fdmp.2025.069719
Received 29 June 2025; Accepted 09 October 2025; Issue published 01 December 2025
 View Full Text
View Full Text Download PDF
Download PDFAbstract
In recent years, tuned liquid dampers (TLDs) have attracted significant research interest; however, overall progress has been limited due to insufficient understanding of the mechanisms governing sloshing-induced loads. In particular, it remains unclear whether the water in aqueducts—common water-diversion structures in many countries—can serve as an effective TLD. This study investigates the generation mechanisms of sloshing loads during the first-order transverse resonance of water in a U-shaped aqueduct using a two-dimensional (2D) numerical model. The results reveal that, at the equilibrium position, the free surface difference between the left and right walls, the horizontal force on the aqueduct, and the fluctuating component of the vertical force all reach their maxima, with energy predominantly stored as potential energy. At the maximum displacement position, the surface difference and horizontal force drop to zero, while the fluctuating vertical force attains its minimum and energy shifts primarily to kinetic form. At this stage, static pressure is governed solely by the vertical convective acceleration, whereas at equilibrium it is closely linked to both the free surface difference and vertical local acceleration of the water. This dynamic energy exchange generates vertical force oscillations even when the free surface appears nearly symmetric.Keywords
Regions with high seismic activity account for a significant portion of strong earthquakes worldwide. Statistics indicate that approximately 35% of earthquakes with a magnitude of 7 or higher occur in seismically active areas [1]. As an overhead water diversion structure spanning rivers and other obstacles, aqueducts are critical hydraulic facilities in water diversion projects. During operation, the mass of water inside an aqueduct often exceeds that of the structure itself. The complex fluid-structure interaction between the water and the aqueduct significantly affects the dynamic characteristics and response of the aqueduct [2].
In recent decades, several countries have constructed or planned a large number of major water diversion projects. Consequently, extensive research has been carried out on aqueducts. Existing studies on the dynamic response of aqueducts under transverse seismic excitation present two conflicting perspectives: (1) Some scholars argue that when the resonance frequency of the water is close to the natural frequency of the overall structure, the water will absorb part of the vibration energy, leading to a reduction in the vibration amplitude of the aqueduct. Thus, the water more or less plays the role of a Tuned Liquid Damper (TLD) (e.g., Refs. [3,4,5]). (2) Due to the fluid-structure interaction between the water and the aqueduct, the presence of water tends to amplify the dynamic response of the aqueduct structure (e.g., Refs. [6,7]). In summary, most studies on the dynamic response of aqueduct structures under transverse seismic excitation have not reached a consistent conclusion.
On one hand, in recent years, the application of various forms of TLDs in structural vibration suppression has been a hot topic in research. Many scholars have carried out numerical simulations and model tests in this field. For example, Ocak et al. applied the adaptive harmony search algorithm (AHS) to optimize the use of TLDs with different liquids on single-story, ten-story, and forty-story building models. The results showed that the optimized TLD can significantly reduce structural displacement and total acceleration, thereby enhancing the seismic performance of buildings, and that the optimal liquid choice varies for different building models [8]. Yusuf et al. combined experimental and numerical analysis methods, utilizing the Ansys Fluent to investigate the vibration control of wind turbine towers. The results showed that a single TLD (with a mass ratio of 4%) could reduce the lateral displacement of the tower by 7.32%, while three TLDs (with a mass ratio of 12%) could reduce it by 48.73% [9]. He et al. employed computational fluid dynamics (CFD) methods and conducted secondary development using OpenFOAM to establish a two-way coupled numerical model. This model was used to study the nonlinear liquid sloshing characteristics of TLDs and their performance in wind-induced vibration control of high-rise buildings. The results indicated that TLDs can effectively mitigate the vibration response of single-degree-of-freedom (SDOF) rigid frame structures under harmonic excitation. At resonance excitation, the maximum displacement response of the structure could be reduced by as much as 78.5% [10]. Domizio et al. proposed a novel high-frequency tuned liquid damper (HF-TLD) and studied its effectiveness in controlling high-frequency structural vibrations through experimental and theoretical analysis. Experimental results demonstrated that the HF-TLD could respond effectively in a wide frequency range above 2.5 Hz and effectively control the dynamic response of low-rise or high-natural-frequency structures. At a mass ratio of 5%, the HF-TLD reduced the maximum relative displacement of the structure by an average of about 20% [11]. Sun et al. investigated the seismic performance of a novel tuned liquid damper with a damping net and a sloped-bottom (DNS-TLD) through mechanical modeling, simplified equivalent damping estimation, single-frame shaking-table tests and numerical simulation. They concluded that DNS-TLD outperforms conventional TLDs in damping capacity, efficiency, robustness and applicability while using less water, thus offering an effective tool for real structural seismic control [12]. Zhou et al. used CFD-coupled simulation and particle swarm optimization to study optimal design of multiple tuned liquid dampers with paddles for mitigating wind-induced vibrations of a 206 m tall building. They concluded that the proposed multi-frequency optimization markedly improves robustness against structural frequency shift, achieving 28–33% better damping performance than traditional single-frequency tuning [13]. Xue et al. used a bidirectional fluid-structure coupling model validated by lab experiments to study tuned liquid column damper (TLCD) vibration control on offshore platforms. They found optimal mass ratio of water-to-platform at 1.5%, tuning ratio at 1.0, achieving up to 78% displacement reduction while avoiding frequency detuning [14]. Saghi and Zi numerically studied a barge-type floating offshore wind turbine (FOWT) integrated with a bidirectional tuned liquid damper (BTLD) using OpenFOAM. They optimized BTLD geometry and placement to reduce pitch motion. Results showed that an optimal BTLD can reduce pitch motion by 10–30%, with the best configuration decreasing pitch by up to 34% at the natural period [15]. Saghi et al. used CFD-RANS/VOF coupled overset-mesh simulations in OpenFOAM to study bidirectional tuned liquid damper (BTLD)/bidirectional tuned liquid column damper (BTLCD) effectiveness on barge-type and octagonal FOWTs under wave loads. They concluded optimal BTLD (case 9, 4 m baffle) and BTLCD (case 6, 60% opening) integrated with 6 m-corner octagonal substructures achieve maximum 28% pitch-motion reduction, while BTLD offers wider damping bandwidth than BTLCD [16]. Liao et al. employed nonlinear finite-element (CEL) modeling and dual-performance optimization to investigate a new baffle-isolated tuned liquid damper (NDB-ITLD). They found that bottom vertical baffles plus elastomeric isolation markedly widen control bandwidth, enhance energy dissipation, and simultaneously cut both structural displacement and isolation-layer deformation under diverse seismic intensities [17].
On the other hand, the water sloshing in aqueducts is essentially a sloshing problem of water in liquid storage containers. Regarding liquid sloshing in containers, Akyildiz and Ünal investigated the pressure variations and three-dimensional effects of water sloshing in rectangular containers through physical experiments. They found that baffles significantly reduce pressure fluctuations, especially under shallow water cases, and that excitation amplitude and frequency have a notable impact on impact pressure [18,19]. Liu and Lin established a numerical model to study nonlinear sloshing in rectangular containers, employing the Large Eddy Simulation (LES) method to model turbulence effects and a second-order accurate VOF method to capture breaking free surfaces. Their results showed that numerical solutions align with linear theory under small excitations and match experimental data under large excitations, validating the capability of their model to simulate breaking free surfaces and strong turbulence [20]. Elahi et al. used a two-dimensional numerical model with the VOF method to capture free surface motion, studying the effects of free surface displacement, fluid viscosity, and surface tension on liquid sloshing in containers. Their results indicated that the model accurately simulates liquid sloshing under complex excitations, including linear, rotational, and coupled motions, providing an effective numerical tool for analyzing sloshing problems [21]. Tosun et al. combined image processing techniques with potential flow theory to study liquid sloshing characteristics in rectangular tanks, including free surface tracking and sloshing force estimation. Their results demonstrated that this method accurately estimates free surface shapes and sloshing forces near resonance frequencies without the need for traditional force sensors [22]. Jin and Lin used numerical methods to investigate the effects of fluid viscosity on liquid sloshing in three-dimensional rectangular containers. They found that viscosity significantly influences free surface behavior, pressure response, rising time, and frequency response, and identified a critical viscosity value that shifts the response from natural frequency to external excitation [23]. Cai et al. compared the VOF, Smoothed Particle Hydrodynamics (SPH), and Arbitrary Lagrangian-Eulerian (ALE) methods to study rigid body forces in partially filled sloshing tanks, recommending SPH and VOF models as superior choices [24]. Jiang et al. developed and validated a three-dimensional variable-mass tank sloshing model using numerical simulations. Their results showed that refueling increases liquid mass, suppressing sloshing but increasing loads, with loads rising as refueling rates increase. Baffles were found to effectively suppress sloshing [25].
To sum up, In the field of TLD, studies mainly focus on three aspects: developing new TLD devices (e.g., Refs. [11,12,17]), analyzing TLD’s seismic mitigation effects on specific structures (e.g., [9,10,14]), and optimizing TLD designs (e.g., Refs. [8,13,15]). In the field of liquid sloshing in containers, existing studies primarily focus on the improvement and comparison of numerical simulation methods (e.g., Refs. [18,19,20]), sloshing characteristics under complex excitations (e.g., Ref. [25]), the effects of viscosity, and engineering applications (e.g., Refs. [22,23]). However, both fields lack systematic research on the generation mechanism of sloshing loads. This scientific gap is particularly significant for gaining a deeper understanding of the dynamic response of aqueduct structures and for developing seismic mitigation devices for these structures. As a typical large mass ratio liquid-structure coupled system, the water-structure mass ratio of an aqueduct (usually 1:3) is much higher than that of conventional TLD devices. Although the spring-mass equivalent model is commonly used in current engineering practice for aqueduct seismic analysis, it can only meet basic design requirements and cannot reveal the coupling mechanism between liquid sloshing and structural dynamic responses. The inertial forces and impact loads generated by liquid sloshing may dominate the dynamic response of aqueduct structures, and their mechanisms are fundamentally different from conventional TLD.
To deeply analyze the dynamic response of aqueducts under seismic action, it’s essential to understand the morphological changes of water inside aqueducts during earthquakes and to reveal the generation mechanisms of sloshing forces acting on the inner walls of aqueducts. This can also provide new insights into sloshing load generation for other fields, such as TLD research and liquid sloshing in containers studies. The U-shaped aqueduct, commonly used in water diversion projects, is selected as the research object. Two-dimensional (2D) Computational Fluid Dynamics (CFD) models for the fluid domain of U-shaped aqueduct are established by ANSYS Fluent, and a set of harmonic displacements with different amplitude and frequency are employed to simulate seismic action. In this study, the generation mechanisms of sloshing forces during the first-order transverse resonance of water in a 2D U-shaped aqueduct are investigated. The mechanisms leading to the extreme and zero values of the horizontal force
A simply supported aqueduct with a U-shaped cross-section, commonly used in water diversion projects, is selected as the research object in this study. The dimensions of the cross-section of this aqueduct are shown in Fig. 1 below.
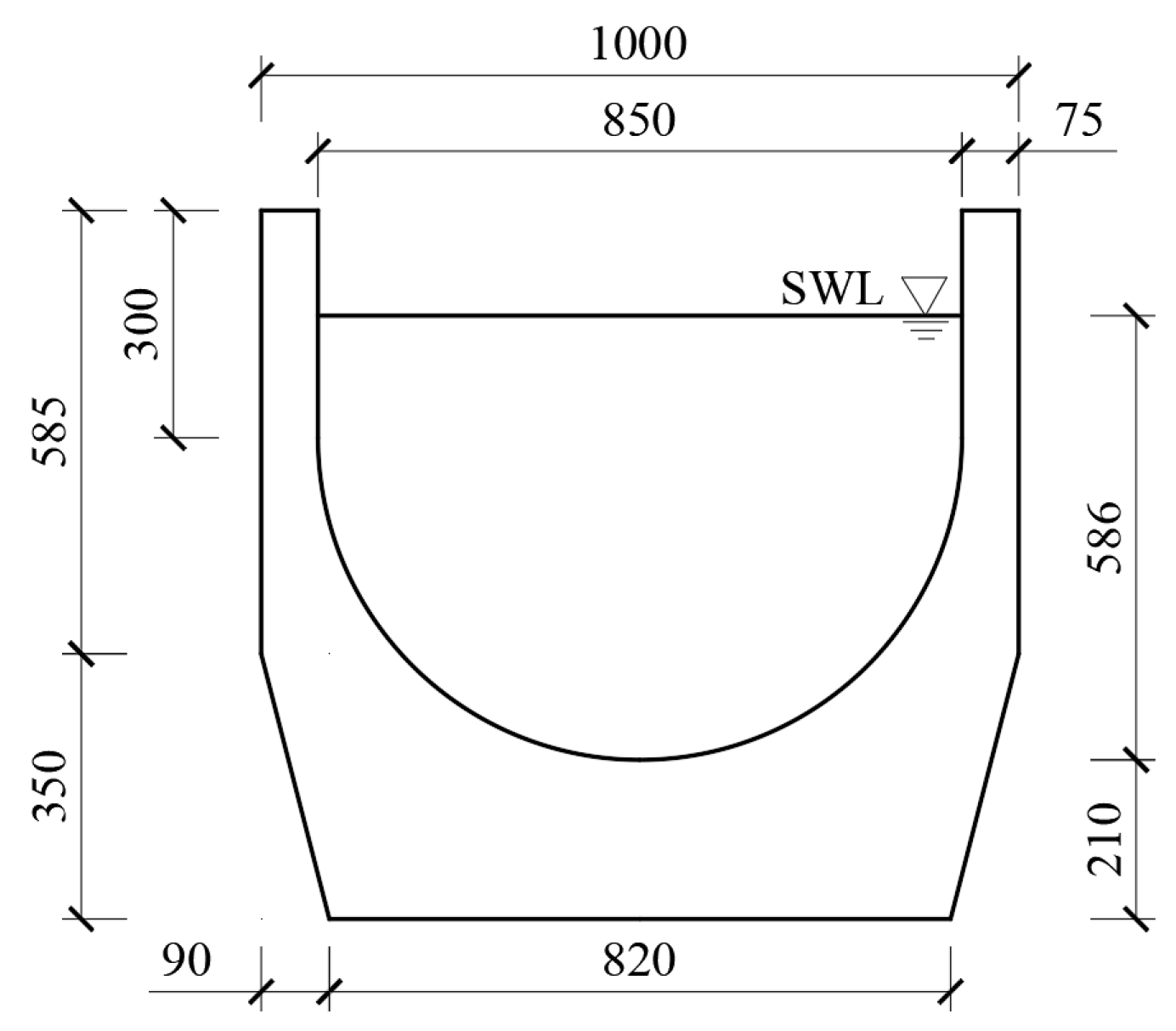
Figure 1: Dimensions of cross-section of the aqueduct used in this study (units: cm).
When simulating the transverse vibration of the water in the aqueduct, the fluid domain can be directly simplified into two dimensions. To increase the difficulty of water escape during high-frequency sloshing (i.e., the escape of water is not considered in this study by employing the following method), the 2D numerical model used in this study extends the side walls by 3 m based on Fig. 1. The specific dimensions of fluid domain are shown in Fig. 2. The upper boundary of the U-shaped fluid domain is set as a pressure outlet (indicated by the black dash dot line in Fig. 2), while all remaining boundaries are defined as no-slip walls. Due to the symmetry of the U-shaped fluid domain, the walls in the numerical model are divided into left and right parts (as shown in Fig. 2). The pressure distribution along the no-slip walls is monitored in Ansys Fluent. In this study, when describing the physical fields of the fluid inside the aqueduct obtained from the numerical model, an absolute coordinate system (fixed coordinate system) is employed by Ansys Fluent for representation. The absolute coordinate system is established at the Origin (0, 0), as illustrated in Fig. 2.
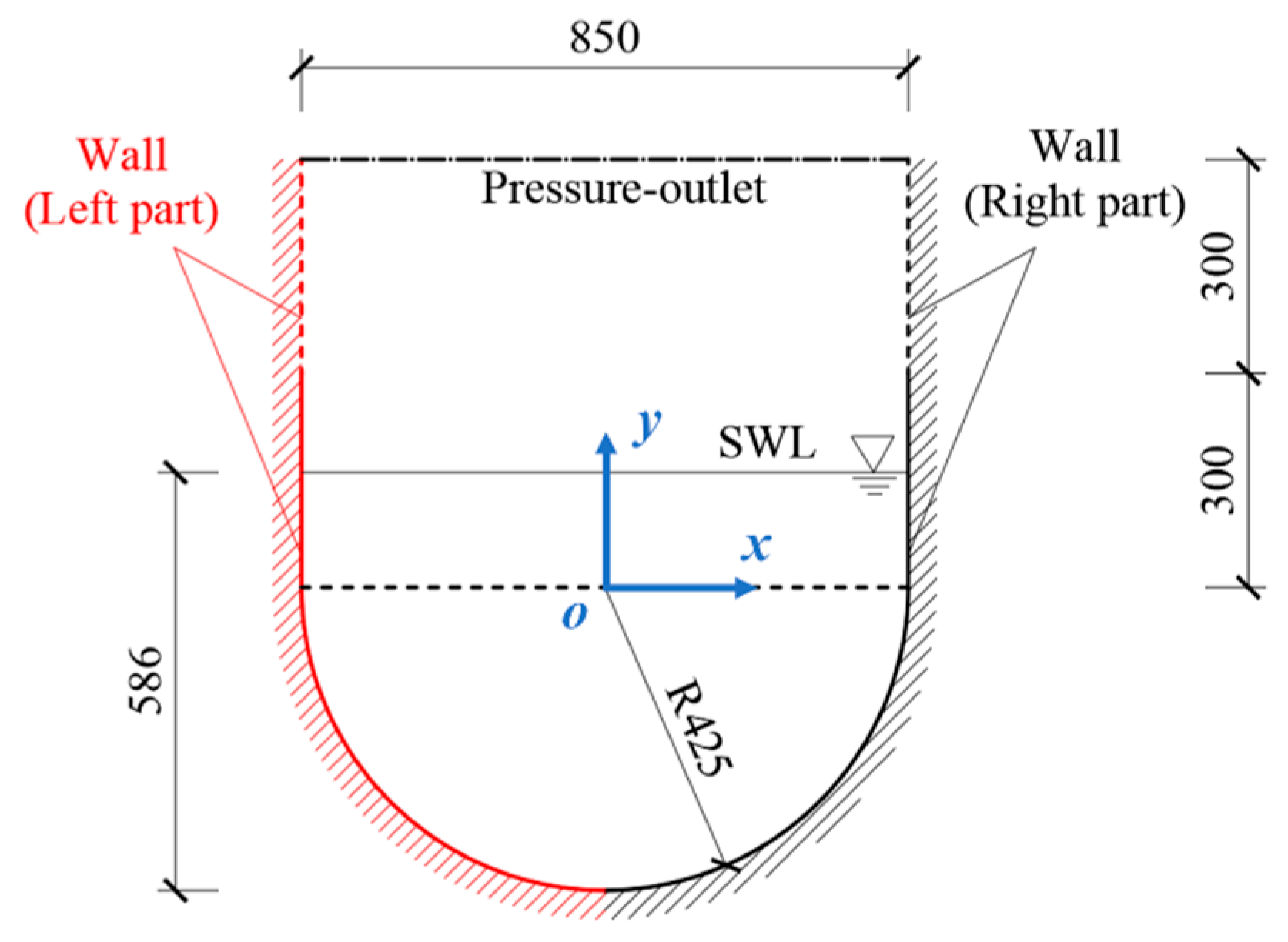
Figure 2: Dimensions of the 2D CFD model of the fluid domain inside the aqueduct (extended side walls indicated by dash lines), wall segmentation method, and schematic of the body-fitted coordinate system (units: cm).
During the transient numerical simulation, the following time histories of different physical quantities are monitored: (1) The horizontal displacement of the fluid domain
To eliminate the influence of different dimensions and more directly reflect the phase relationships among the physical quantities mentioned above, normalization is performed according to Eq. (1). Each physical quantity is remapped to the range [−1, 1].
Since
In this study, harmonic displacement is used to analyze the generation mechanism of sloshing forces during transverse vibration of the water in the aqueduct. To determine the range of amplitude and frequency for the harmonic displacement used in this study, six real seismic displacement time histories were randomly selected from Pacific Earthquake Engineering Research Center (PEER). Their Peak Ground Displacement (PGD) and dominant frequency ranges are statistically analyzed, as listed in Table 1 below.
Table 1: Main parameters of the selected ground motion records.
| Eqk. Name | Year | Station | Component | Magnitude | PGD (cm) | Dominant Frequency Range (Hz) |
|---|---|---|---|---|---|---|
| Imperial Valley-02 | 1940 | El Centro Array #9 | ELC180 | 6.95 | 8.66 | (1.08~1.67) 1.46 |
| Kern County | 1952 | Taft Lincoln School | TAF021 | 7.36 | 6.11 | (1.03~1.77) 1.37 |
| Northern Calif-03 | 1954 | Ferndale City Hall | FRN044 | 6.50 | 14.62 | (0.43~0.90) 0.63 |
| Parkfield | 1966 | Cholame-Shandon Array #5 | C05085 | 6.19 | 5.78 | (0.44~0.93) 0.63 |
| Imperial Valley-02 | 1967 | Ferndale City Hall | FRN224 | 5.60 | 1.40 | (0.71~2.00) 1.18 |
| Kern County | 1971 | Lake Hughes #1 | L01021 | 6.61 | 3.12 | (0.68~1.75) 0.99 |
From Table 1, it can be observed that the PGD of all the selected ground motion records is generally within 10 cm. Therefore, harmonic displacements of 3 cm, 5 cm, 10 cm, and 15 cm are considered in this study. The dominant frequencies of the selected ground motion records in Table 1 are all smaller than 2 Hz. According to the study by Dou et al. [26], the first two transverse natural frequencies of the water (the first-order and third-order natural frequencies) in the U-shaped fluid domain (shown in Fig. 2) are 0.296 Hz and 0.524 Hz, respectively, which indicates that this first two transverse natural frequencies of the water fall within the dominant frequency range of the selected ground motion records.
Thus, a set of harmonic displacements with frequencies below 2 Hz is used to simulate the transverse vibration of the water in the U-shaped aqueduct. The amplitudes and frequencies of the harmonic displacements used in this study are listed in Table 2.
Table 2: Parameters of harmonic displacement used in the numerical simulations (
| 0.03 | 0.2, 0.296, 0.4, 0.524, 0.6, 0.8, 1.0, 1.2, 1.4, 1.6, 1.8 |
| 0.05 | 0.2, 0.296, 0.4, 0.524, 0.6, 0.8, 1.0, 1.2, 1.4, 1.6, 1.8 |
| 0.10 | 0.2, 0.296, 0.4, 0.524, 0.6, 0.8, 1.0, 1.2, 1.4, 1.6, 1.8 |
| 0.15 | 0.2, 0.296, 0.4, 0.524, 0.6, 0.8, 1.0, 1.2, 1.4, 1.6, 1.8 |
In this study, the cases are named in the format “Case A-f”, for example, “Case 0.03–0.2”, which indicate that the case of harmonic excitation with amplitude 0.03 m and frequency 0.2 Hz.
2.3 Validation for Numerical Simulation
Due to the large cross-sectional dimensions of the aqueduct selected in this study, physical experiments to validate the accuracy of the full-scale numerical model are impractical. And in the existing studies, there are only data on liquid sloshing in rectangular containers, and no studies have chosen a U-shaped container as the research object. We believe that the container shape has little influence on meshing method of the fluid domain, the various model settings in CFD software, boundary conditions, and model parameter settings. Therefore, a scaled-down rectangular container with dimensions of 30 cm × 30 cm × 30 cm (wall thickness: 0.5 cm, fluid domain: 29 cm × 29 cm × 29 cm) is used to verify the rationality of settings in Ansys Fluent. This validation aims to determine the optimal turbulence model and temporal resolution (time step size) for simulating liquid sloshing phenomena. Subsequently, the validated turbulence model and time step size are applied to the U-shaped aqueduct cross-section (as shown in Fig. 2) to perform grid independence validation.
To improve the convergence of the numerical model and reduce the influence of the initial sloshing state on subsequent processes, a gradual amplitude increase method with constant frequency is adopted. The excitation method for the numerical model is described as follows (The excitation method employed in the physical experiments is consistent with this):
2.3.1 Governing Equations for Fluid Dynamics
The two-dimensional CFD model used in this study is established in ANSYS Fluent. The finite volume method (FVM) is employed to solve the incompressible Reynolds-Averaged Navier–Stokes (RANS) equations. The computational domain consisted of water and air, and the Volume of Fluid (VOF) method was adopted to capture the free surface between the two phases [27]. Pressure–velocity coupling was handled using the PISO algorithm, while the gradient was calculated using the least-squares cell-based scheme, pressure was interpolated with the PRESTO! scheme, and the momentum equations were discretized using a second-order upwind scheme [28]. For the volume fraction, a compressive scheme was applied to sharpen the interface [28]. The turbulence kinetic energy and dissipation rate were discretized with a first-order upwind scheme [28]. Temporal discretization was performed with a first-order implicit scheme [28]. The time step size was chosen such that the Courant number always remained below 0.5, thereby ensuring numerical stability and accuracy of the transient simulations.
Das et al. compared the computational precision of inviscid flow and six different turbulence models based on experimental data while studying the vibration suppression effect of Tuned Liquid Dampers (TLDs) on high-rise buildings by numerical simulation [29]. The six turbulence models include the Standard
2.3.2 Physical Experiment for Validation of Ansys Fluent Settings
The physical experiments were conducted in a laboratory equipped for structural and hydraulic testing. Six-component load cell from FORCECHINA named FC6D90 was used to measure the sloshing force. The measuring range of forces
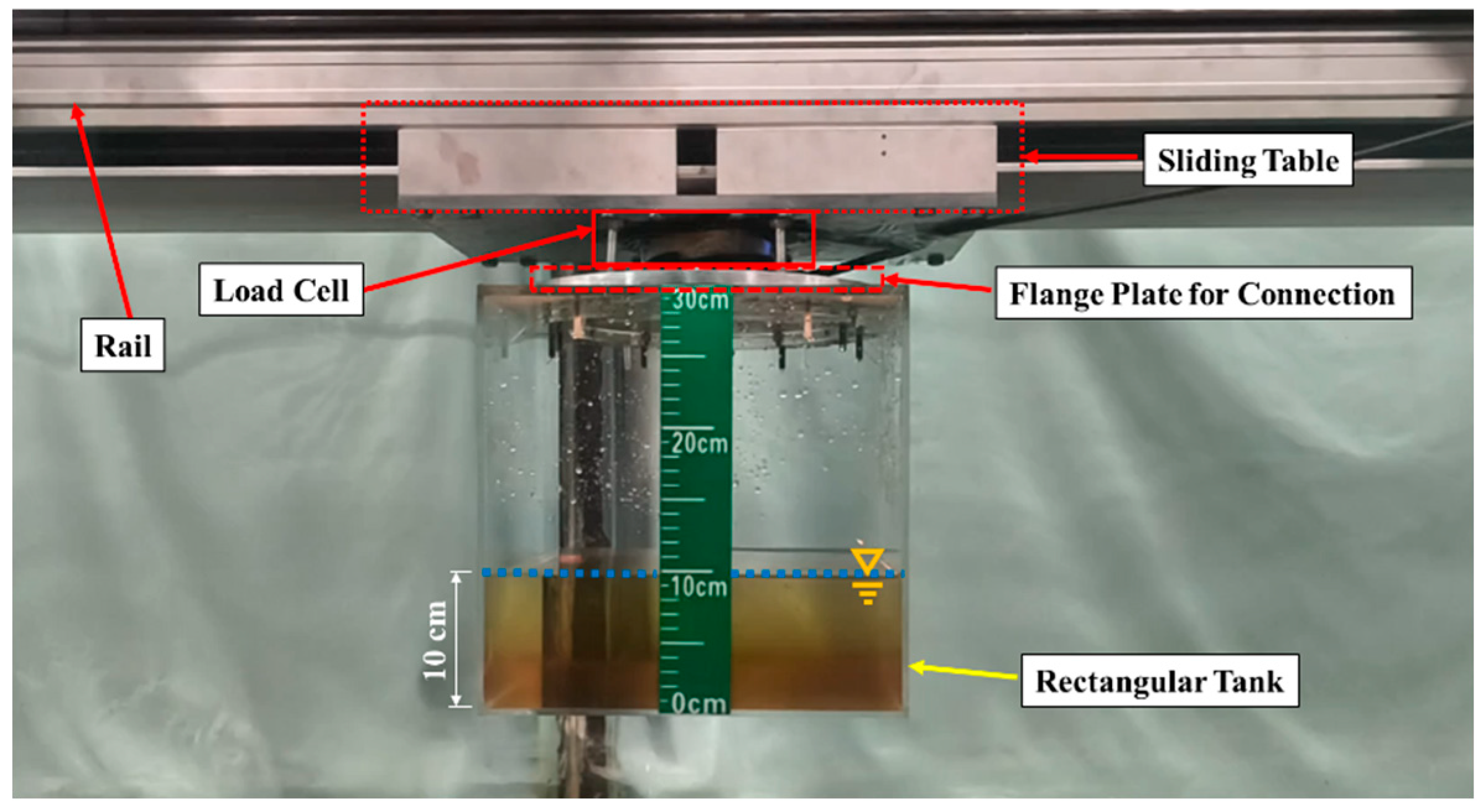
Figure 3: Photo of installation of the physical experimental model.
Based on the assumption of potential flow theory, the natural frequencies of water inside a rectangular tank can be analytically determined as [31],
Prior to the official beginning of the experiment, no-load tests on the empty tank are conducted using a set of sinusoidal displacements with amplitude
Table 3: Results of no-load tests.
| 0.003 | 1.1 | 0.80 | 5.59 | 5.23 | 6.86 |
| 1.2 | 0.94 | 5.51 | 5.26 | ||
| 1.3 | 1.10 | 5.51 | 5.26 | ||
| 1.4 | 1.31 | 5.62 | 7.52 | ||
| 1.5 | 1.49 | 5.58 | 6.63 | ||
| 1.6 | 1.67 | 5.50 | 5.15 | ||
| 1.7 | 1.83 | 5.34 | 2.16 | ||
| 1.8 | 2.07 | 5.39 | 3.13 |
The data in Table 3 shows that the maximum error between the model mass
In this section, the CFD model setup is verified using the first-order resonance case of water in a rectangular container (Case 0.003–1.46). Existing studies (e.g., Refs. [20,32,33]) have shown that uniform grids (with grid sizes corresponding to 1% of the width of the fluid domain) are sufficient for numerical simulations of liquid sloshing in storage containers and similar problems, and 2D CFD model is precision enough to simulate the liquid sloshing in 3D rectangular tanks under horizontal excitations. Therefore, a 2D CFD model (
The time-history curves of horizontal force
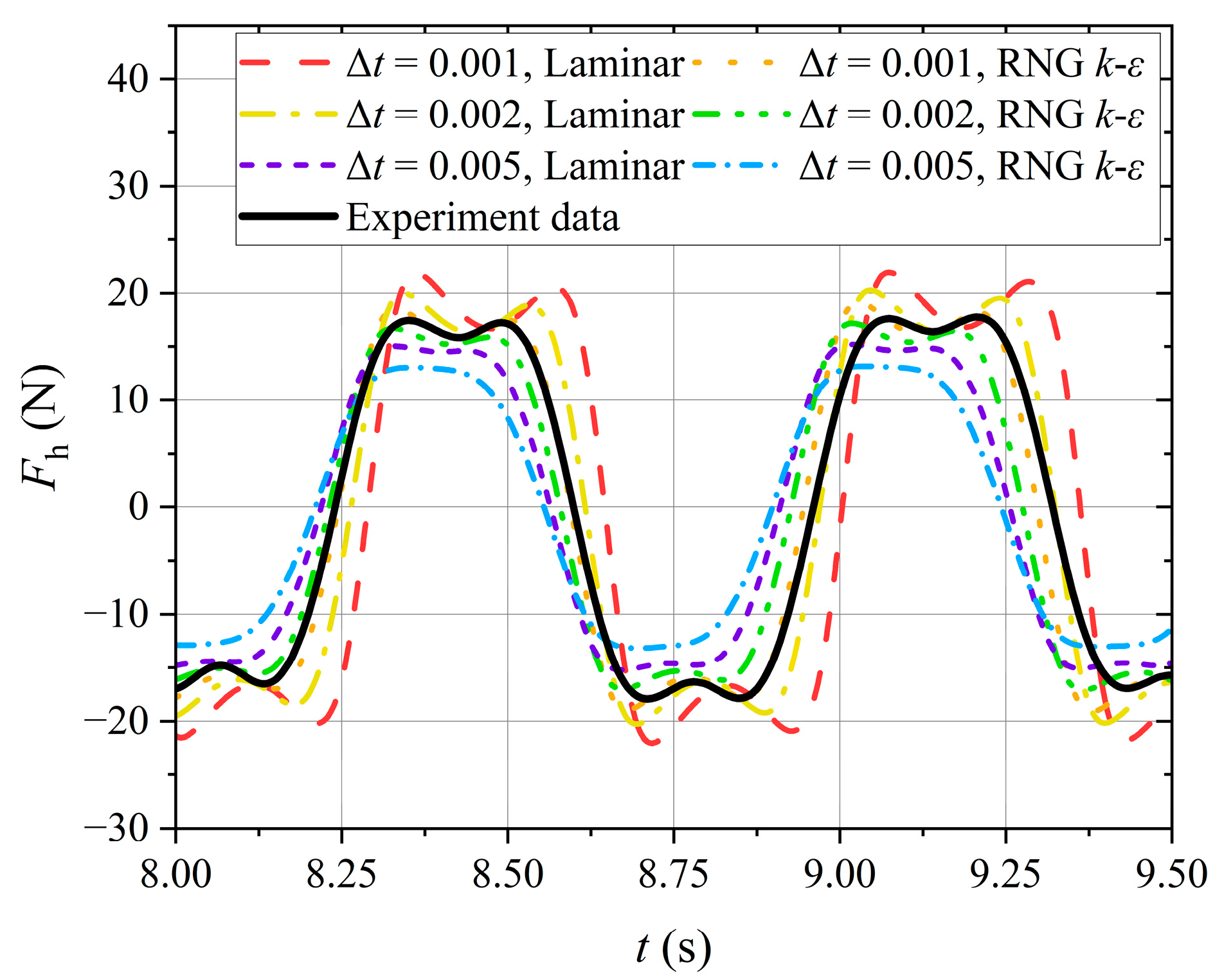
Figure 4: The time history curves of the horizontal force
Table 4: Comparison of the average of maximum values per cycle of the horizontal force
| No. | Turbulence Model | Number of Time Steps | Time Step Size (s) | ||||
|---|---|---|---|---|---|---|---|
| 1 | 0.003 | 1.46 | Experiment data | 17.84 | / | ||
| 2 | Laminar | 10,000 | 0.001 | 21.99 | 23.28 | ||
| 3 | RNG | 10,000 | 0.001 | 19.12 | 7.18 | ||
| 4 | Laminar | 5000 | 0.002 | 20.28 | 13.69 | ||
| 5 | RNG | 5000 | 0.002 | 17.14 | −3.89 | ||
| 6 | Laminar | 2000 | 0.005 | 15.21 | −14.75 | ||
| 7 | RNG | 2000 | 0.005 | 13.18 | −26.10 | ||
From the time-history curve of the physical experiment in Fig. 4, it can be seen that the curve has the characteristic of two peaks. Except for the two models with
For the grid independence test, six different schemes of grids are selected, with grid sizes corresponding to 0.5%, 0.625%, 0.75%, 0.875%, 1%, and 2% of the width of the U-shaped fluid domain. The basic information of these grids, as well as the average of maximum values per cycle of the horizontal force, the fluctuating component of the vertical force (
Table 5: Grid independence validation results for the Case 0.05–0.296.
| Scheme | Grid Size (m) | Number of Grids | Computational Cost (Core-Hour) | ||||
|---|---|---|---|---|---|---|---|
| 0.5% | 0.0425 | 44,420 | 9.4 | 37.32 | 0.000 | 9.80 | 0.000 |
| 0.625% | 0.0531 | 28,647 | 6.8 | 37.33 | 0.029 | 9.80 | 0.000 |
| 0.75% | 0.0638 | 20,233 | 4.7 | 37.31 | −0.029 | 9.79 | −0.138 |
| 0.875% | 0.0743 | 15,053 | 3.5 | 37.29 | −0.059 | 9.78 | −0.275 |
| 1% | 0.085 | 11,507 | 2.3 | 37.28 | −0.088 | 9.76 | −0.413 |
| 2% | 0.17 | 2927 | 1.7 | 36.96 | −0.966 | 9.59 | −2.201 |
Table 6: Grid independence validation results for the Case 0.05–1.8.
| Scheme | Grid Size (m) | Number of Grids | Computational Cost (Core-Hour) | ||||
|---|---|---|---|---|---|---|---|
| 0.5% | 0.0425 | 44,420 | 9.2 | 148.29 | 0.000 | 2.57 | 0.000 |
| 0.625% | 0.0531 | 28,647 | 6.5 | 148.17 | −0.081 | 2.54 | −1.111 |
| 0.75% | 0.0638 | 20,233 | 4.6 | 147.61 | −0.458 | 2.50 | −2.593 |
| 0.875% | 0.0743 | 15,053 | 3.2 | 147.49 | −0.539 | 2.47 | −3.704 |
| 1% | 0.085 | 11,507 | 2.2 | 147.39 | −0.606 | 2.46 | −4.074 |
| 2% | 0.17 | 2927 | 1.7 | 147.72 | −0.384 | 2.34 | −8.889 |
According to the results in Table 5 and Table 6, except for the 2% grid, the
3 Results of Numerical Simulation
Among all the non-resonance cases, the time history curves of
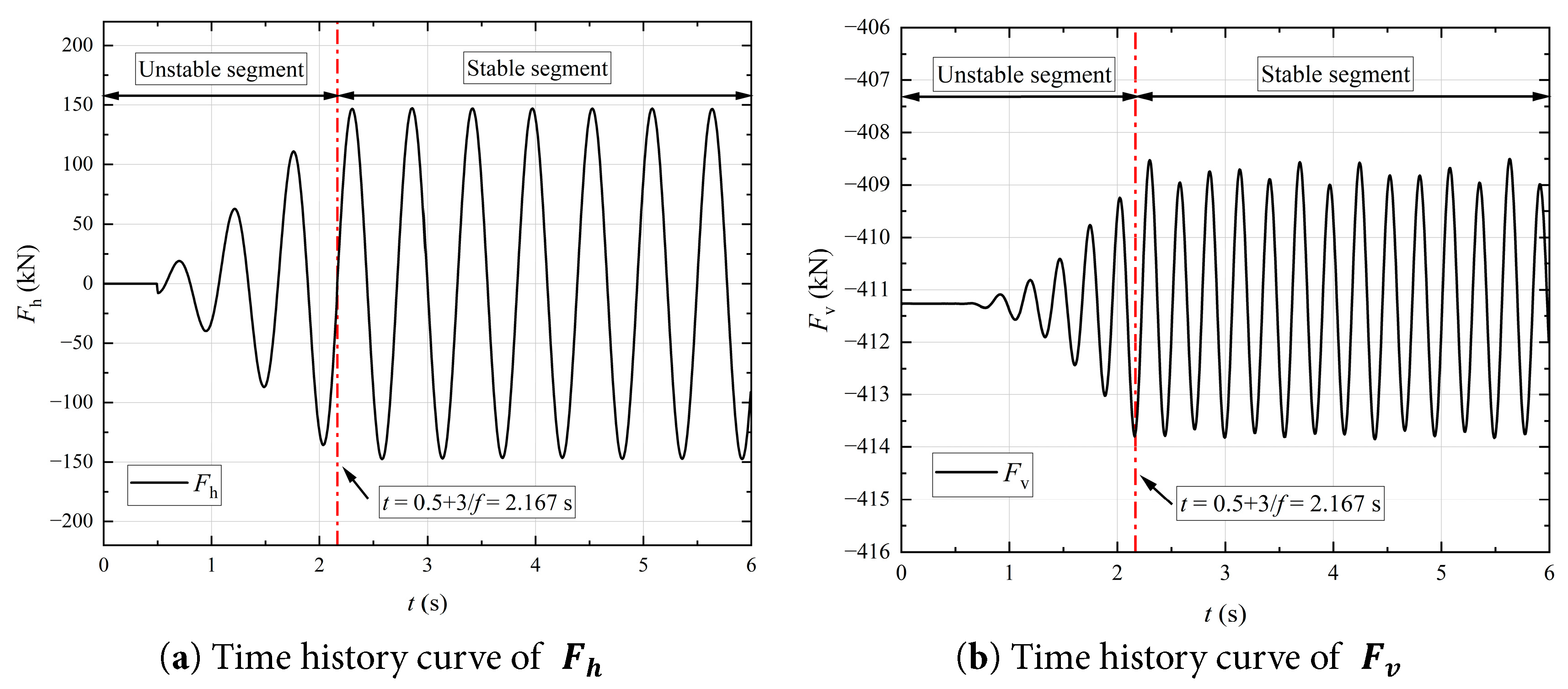
Figure 5: Time history curves of the resultant forces for the Case 0.05–1.8. (a)
For resonance cases, the motion of the aqueduct continuously transfers energy to the water inside, causing
From Fig. 5, regardless of whether the water is in resonance, the frequency of
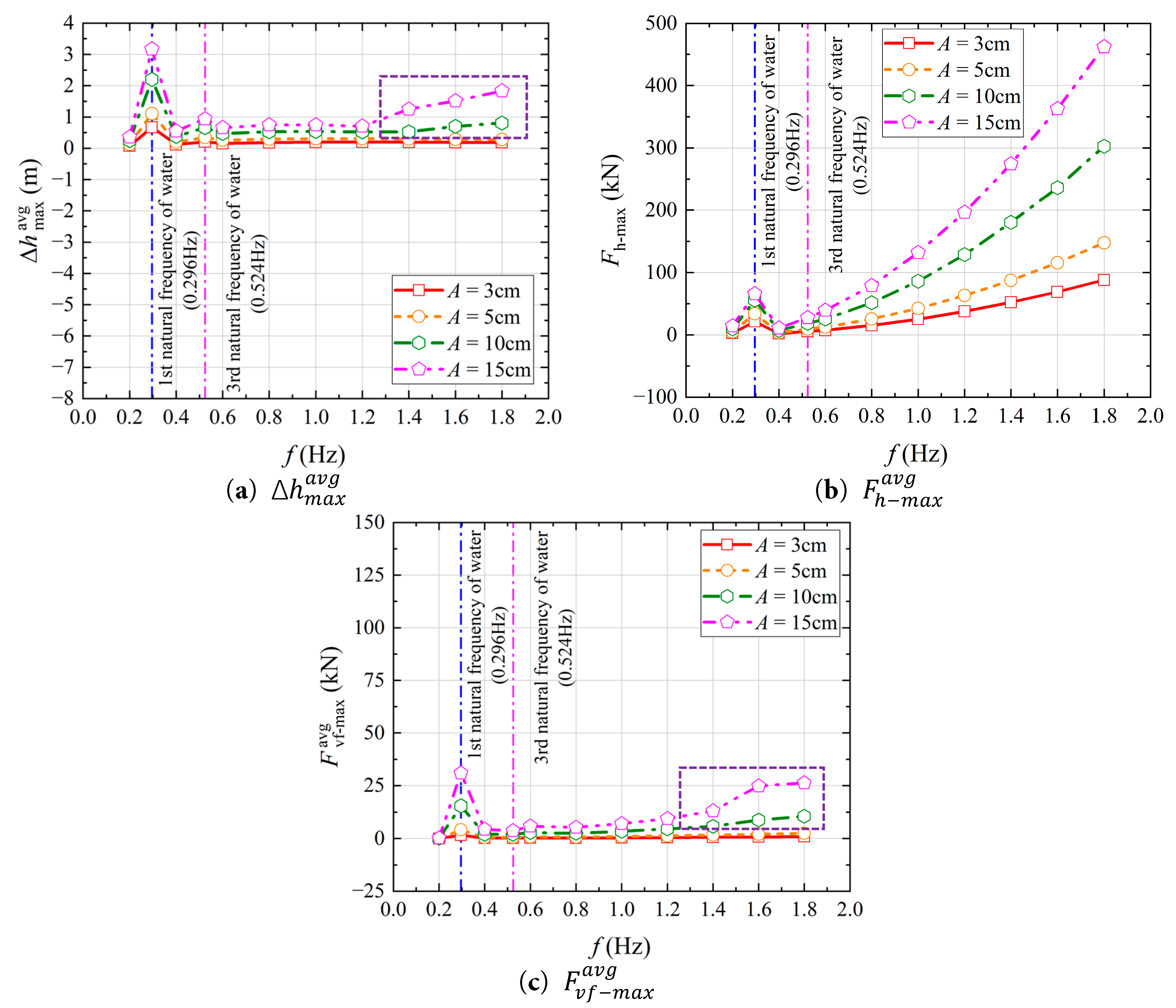
Figure 6: Relationships between the excitation parameters (
As shown in Fig. 6a, the maximum free surface difference
As shown in Fig. 6b,c, under the first-order resonance cases of water (
In summary, the mechanisms behind the generation of the horizontal force
4 Generation Mechanism of Sloshing Forces under Resonance of Water
The time history curves of the normalized horizontal force
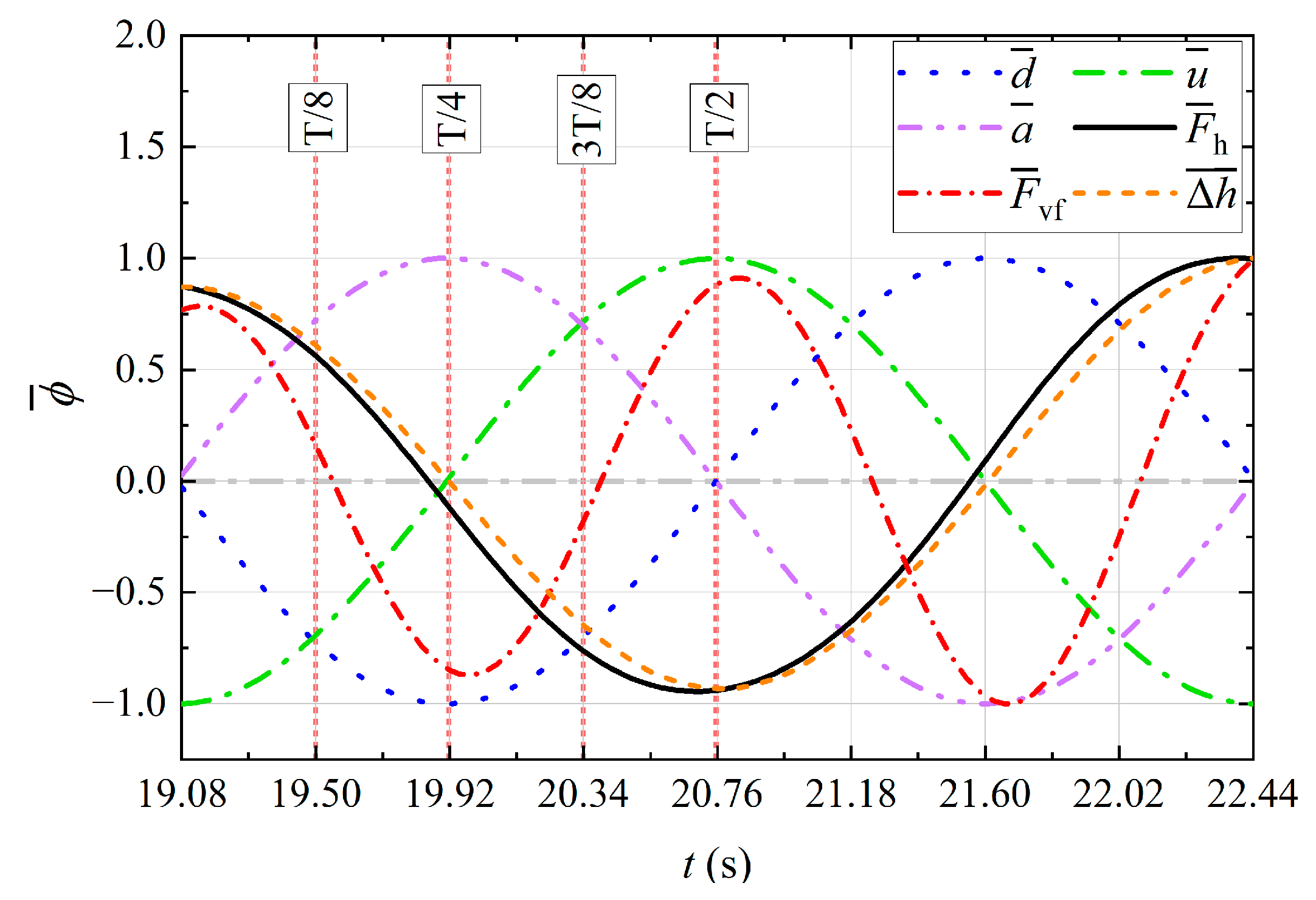
Figure 7: Time history curves of the normalized horizontal force
For structural load analysis, the moments when forces reach zero or extreme values are of particular interest. In Fig. 7, additional annotations are provided for the half-cycle (
As shown in Fig. 7, in the Case 0.05–0.296, the
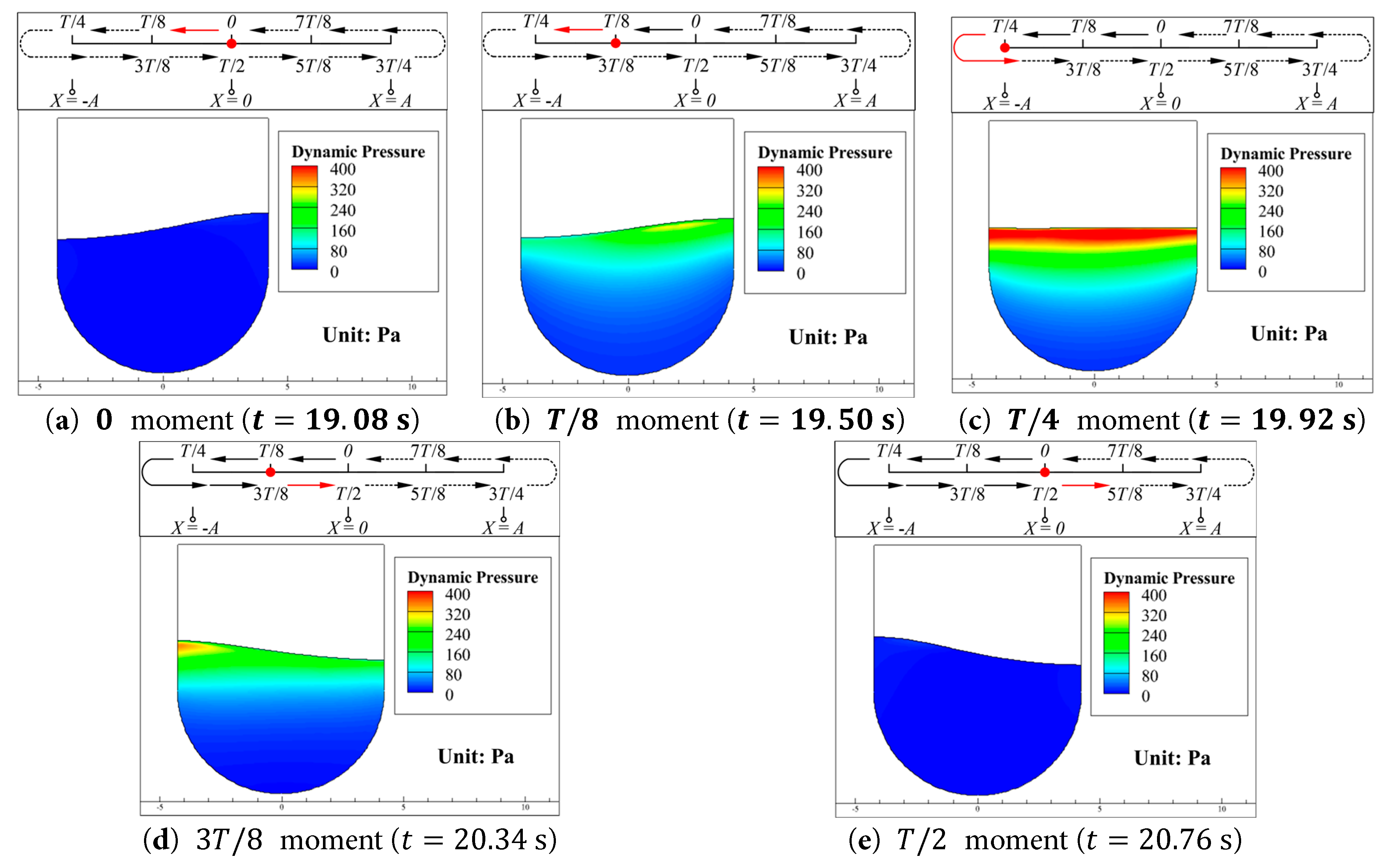
Figure 8: Dynamic pressure contours of the water inside the aqueduct at five key moments during the first half of a cycle in the stable segment (19.08 s to 22.44 s) for the Case 0.05–0.296 (a–e).
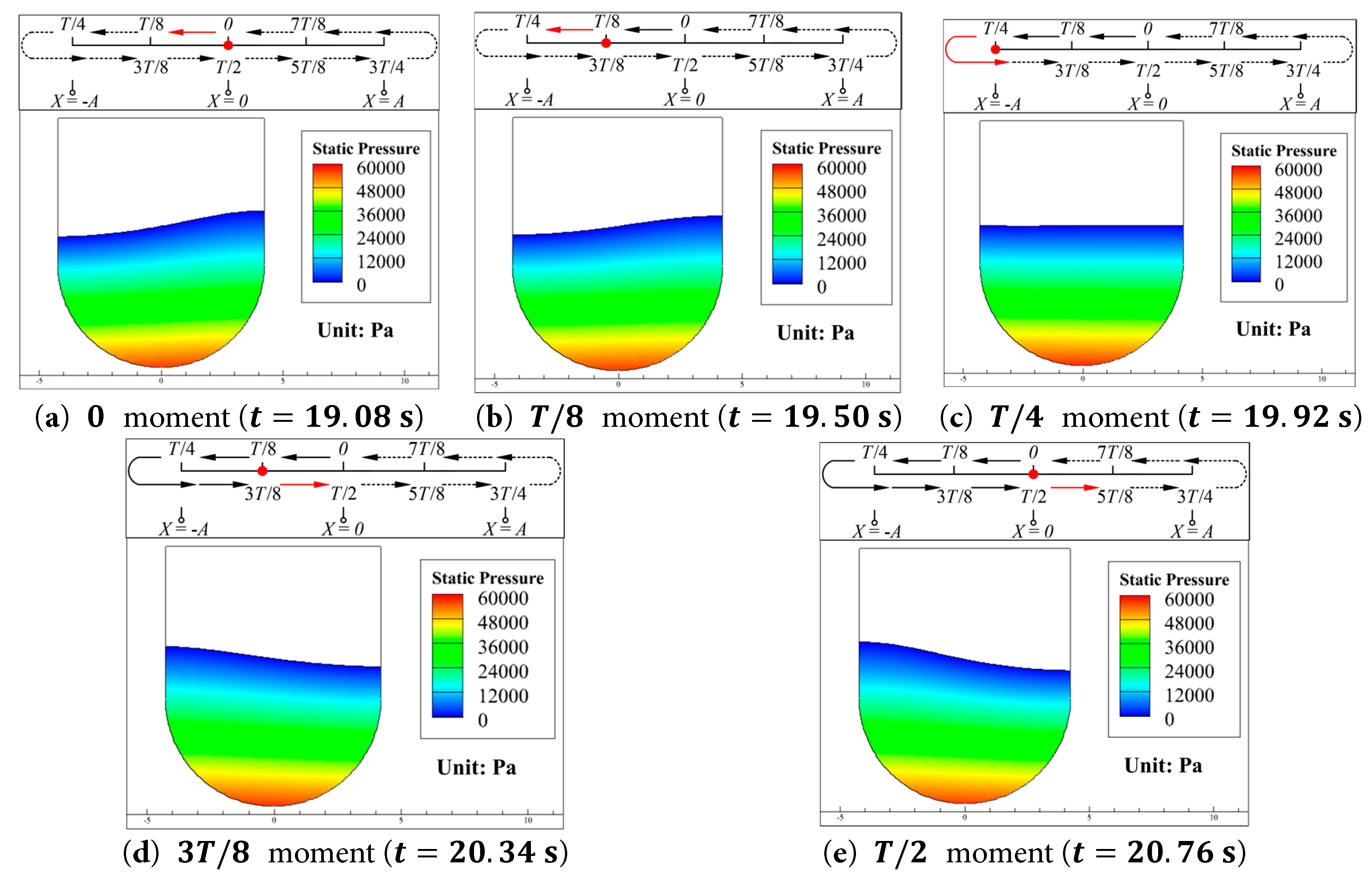
Figure 9: Static pressure contours of the water inside the aqueduct at five key moments during the first half of a cycle in the stable segment (19.08 s to 22.44 s) for the Case 0.05–0.296 (a–e).
As shown in Fig. 8 and Fig. 9, the dynamic pressure is orders of magnitude smaller than the static pressure, and therefore, the dynamic pressure can be neglected in this study. The free surface alternately rises (or falls) at the left and right walls, and the shapes of the free surface is consistent with the experimental observations reported by Li and Wang [34], which confirms that the water inside the aqueduct has undergone first-order resonance.
As shown in Fig. 9a,e,
In summary, the flow fields (velocity field and pressure field) of the water at the 0 and
4.1 Analysis of Velocity Filed
The contours of the velocity component
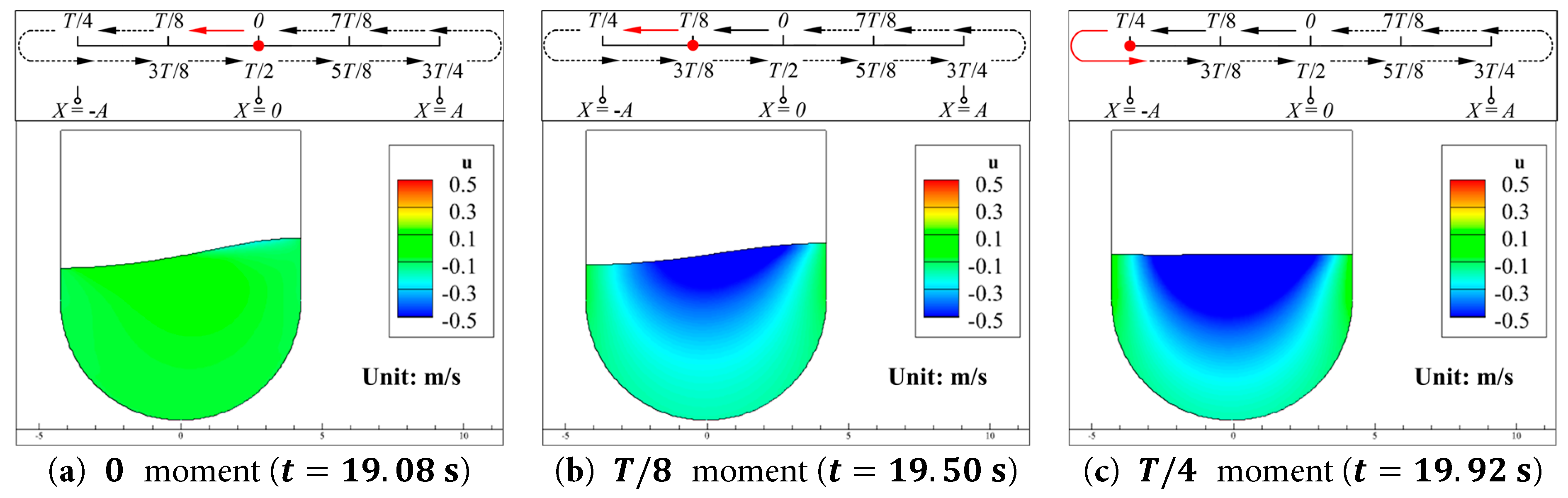
Figure 10: Contours of the velocity component
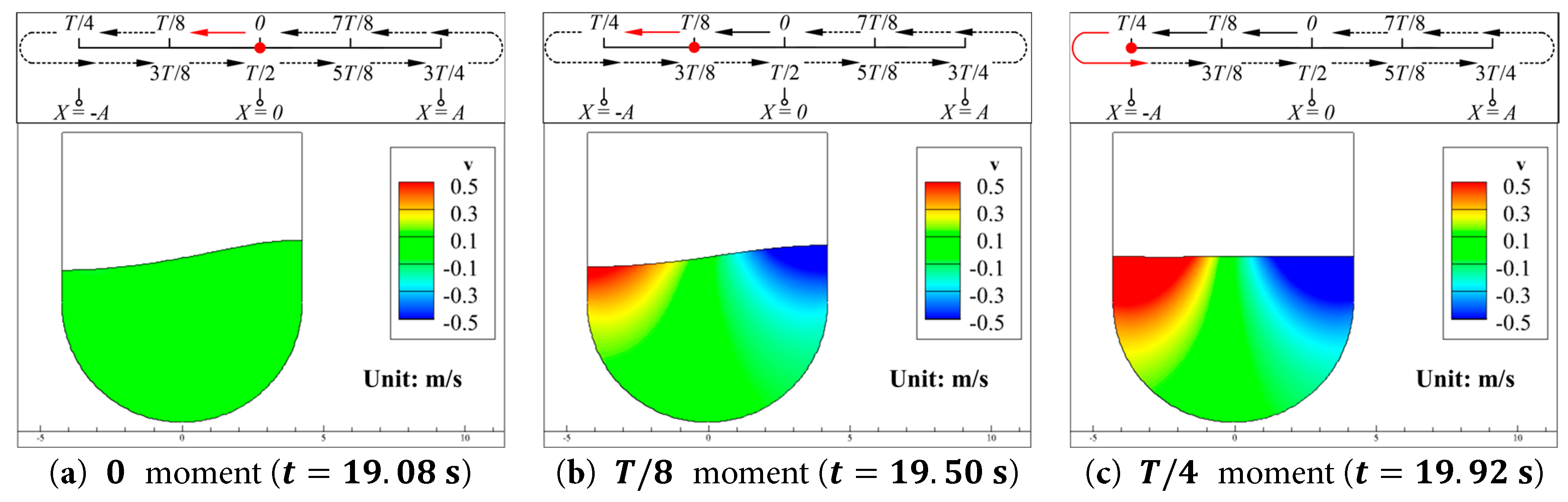
Figure 11: Contours of the velocity component
At the three selected moments, the form of energy in the water inside the aqueduct undergoes significant conversion. Specifically, when
The velocity component
4.2 Analysis of Static Pressure Variation ΔPs
To investigate the generation mechanisms of
In this study, for the convenience of analyzing the contours of various physical quantities in the flow field, the following annotations are made on each contours: the red dash line indicates the free surface at a moment, the blue dash dot line represents the free surface in the stationary state, the green double dot dash line indicates the boundary between the rectangular and semicircular parts of the U-shaped aqueduct, the purple dot line represents the symmetry axis of the aqueduct, the orange solid line denotes the contour where
The contours of the static pressure variation
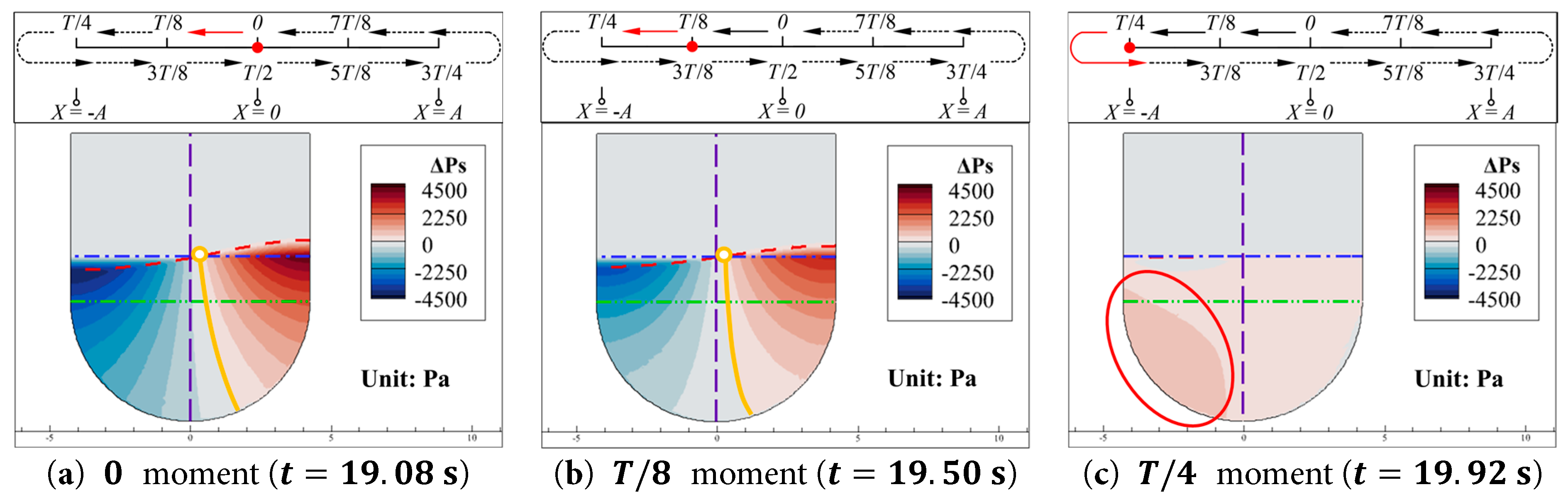
Figure 12: Contours of the static pressure variation
From Fig. 12, it can be observed that as the free surface alternately rises (or falls) at the left and right walls, the static pressure variation
Regions with higher absolute values of
As shown in Fig. 12a,b, the region enclosed by the red dash line and the blue dash dot line can be divided into two areas based on the sign of
4.3 Influence of Acceleration Field
Studies by many scholars (e.g., Refs. [35,36]) have shown that the viscosity of the liquid can be neglected in the analysis of liquid sloshing phenomena in containers. And Ref. [29] also shows that fluid viscosity only affects the amplitude of the surface oscillation without altering the temporal profile; hence, the Euler equations are employed herein to elucidate the underlying mechanism of sloshing-induced loads.
The Euler equations in the horizontal (x-direction) and vertical (y-direction) directions are given as follows:
Since the Euler equations essentially represent Newton’s second law in fluid mechanics, the left-hand side of the Euler equations describes the acceleration generated by the fluid velocity field. Specifically, the left-hand side of Eq. (7) is the material derivative of
Based on the analysis of the spatial distribution of
In the stationary state, the velocity of the water is zero. Therefore, substituting
The contours of the local acceleration in the y-direction
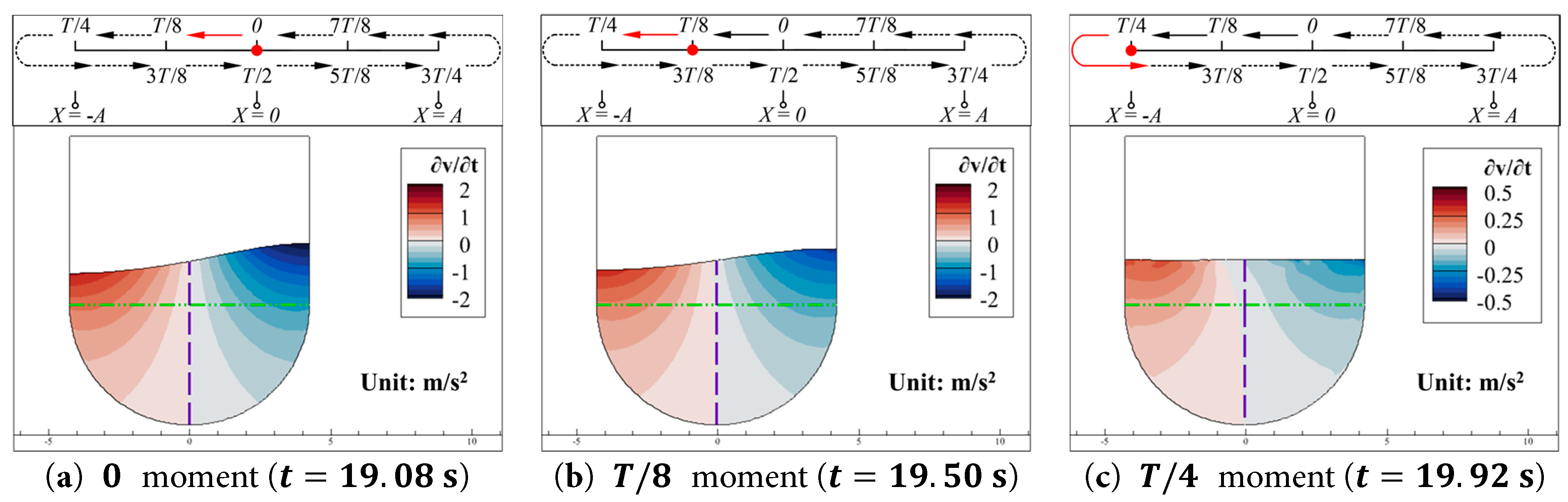
Figure 13: Contours of the local acceleration in the y-direction
The contours of the convective acceleration in the y-direction
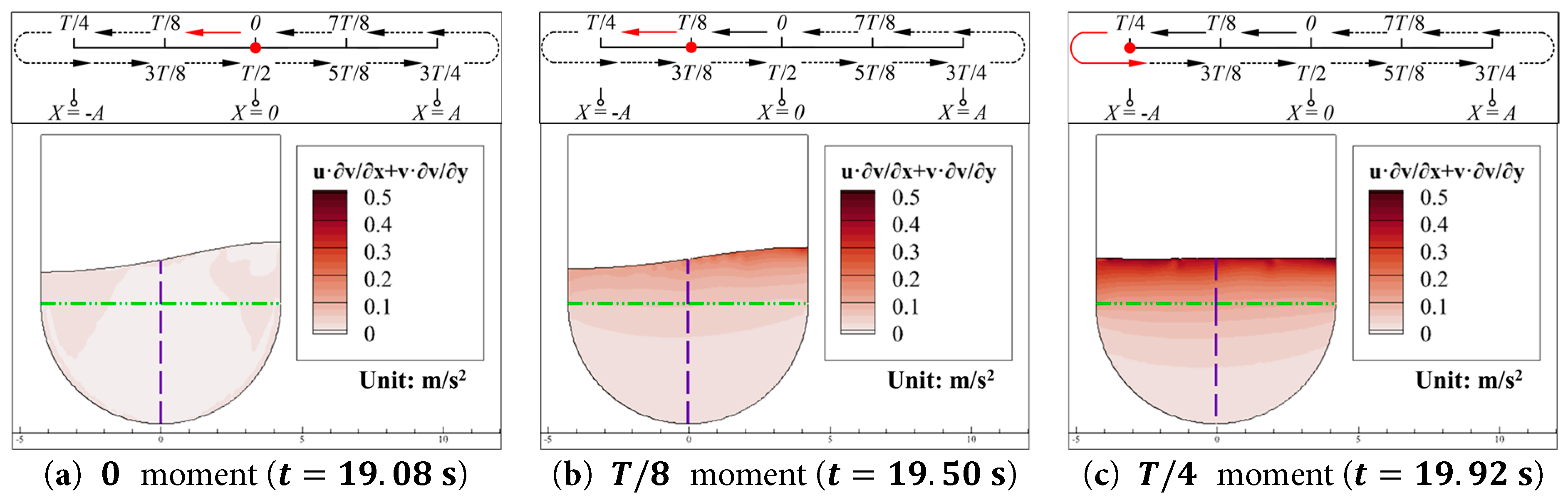
Figure 14: Contours of the convective acceleration in the y-direction
As shown in Fig. 13, since the direction of free surface fluctuations is opposite at the left and right walls, the sign of the local acceleration in the vertical direction
The convective acceleration in the vertical direction
By combining the analysis of Fig. 13 and Fig. 14, it can be observed that when the energy of the water inside the aqueduct is primarily in the form of potential energy, the free surface height changes slowly, and
From Eq. (7), it can be seen that
The contours of the local acceleration in the x-direction
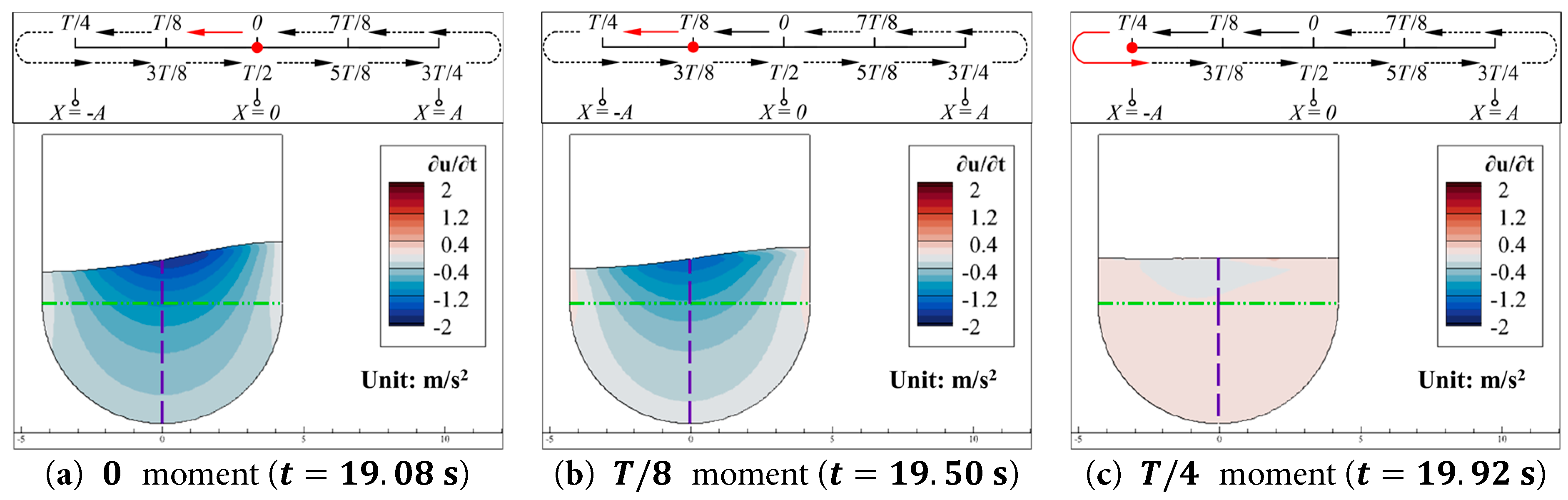
Figure 15: Contours of the local acceleration in the x-direction
The contours of the convective acceleration in the x-direction
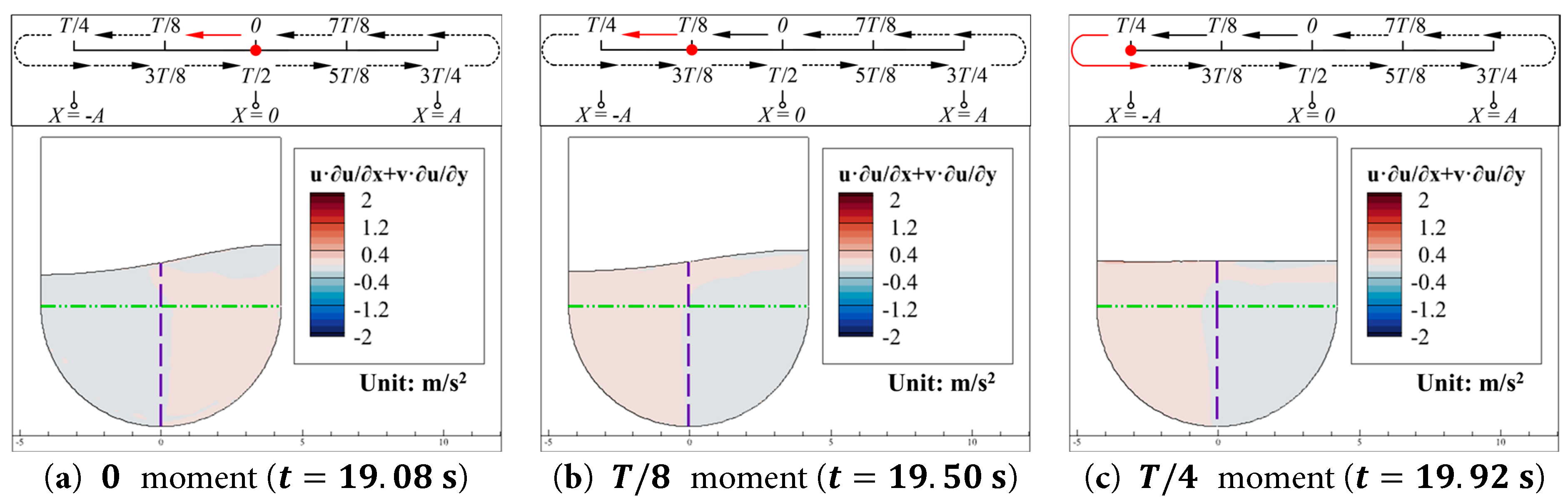
Figure 16: Contours of the convective acceleration in the x-direction
As shown in Fig. 16, since first-order resonance occurs in the Case 0.05–0.296, the free surface primarily fluctuates in the y-direction, and thus
Combining Fig. 15 and Fig. 16, it can be observed that the non-zero regions of
In summary, the free surface fluctuations caused by resonance are the reason for the horizontal local acceleration
4.4 Generation Mechanism of Horizontal Force Fh
The forces exerted on the aqueduct by the water (including the horizontal force
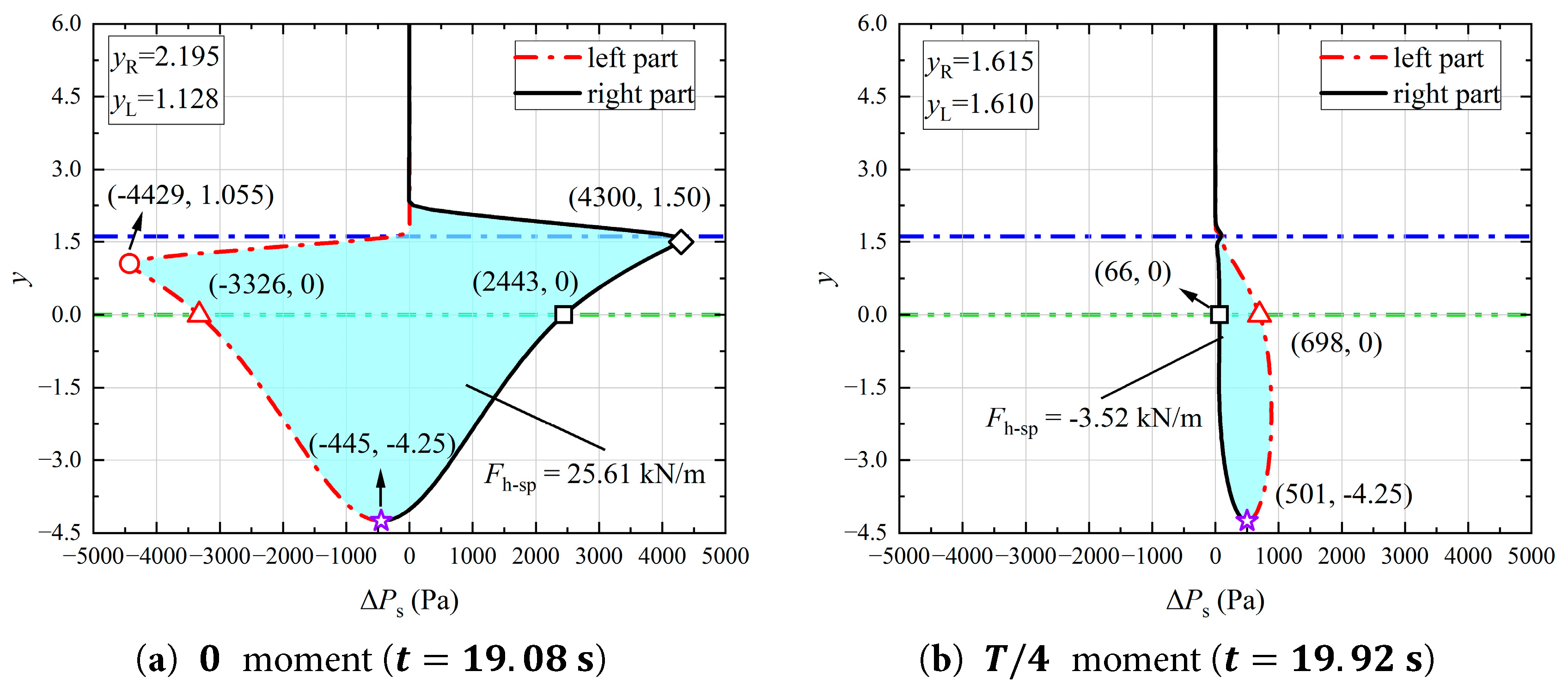
Figure 17: Distribution of
At the 0 moment (
The free surface fluctuation at the right wall is 21.9% higher than that at the left wall, but the absolute value of the extreme
When
4.5 Generation Mechanism of Fluctuating Component of Vertical Force Fvf
The vertical force
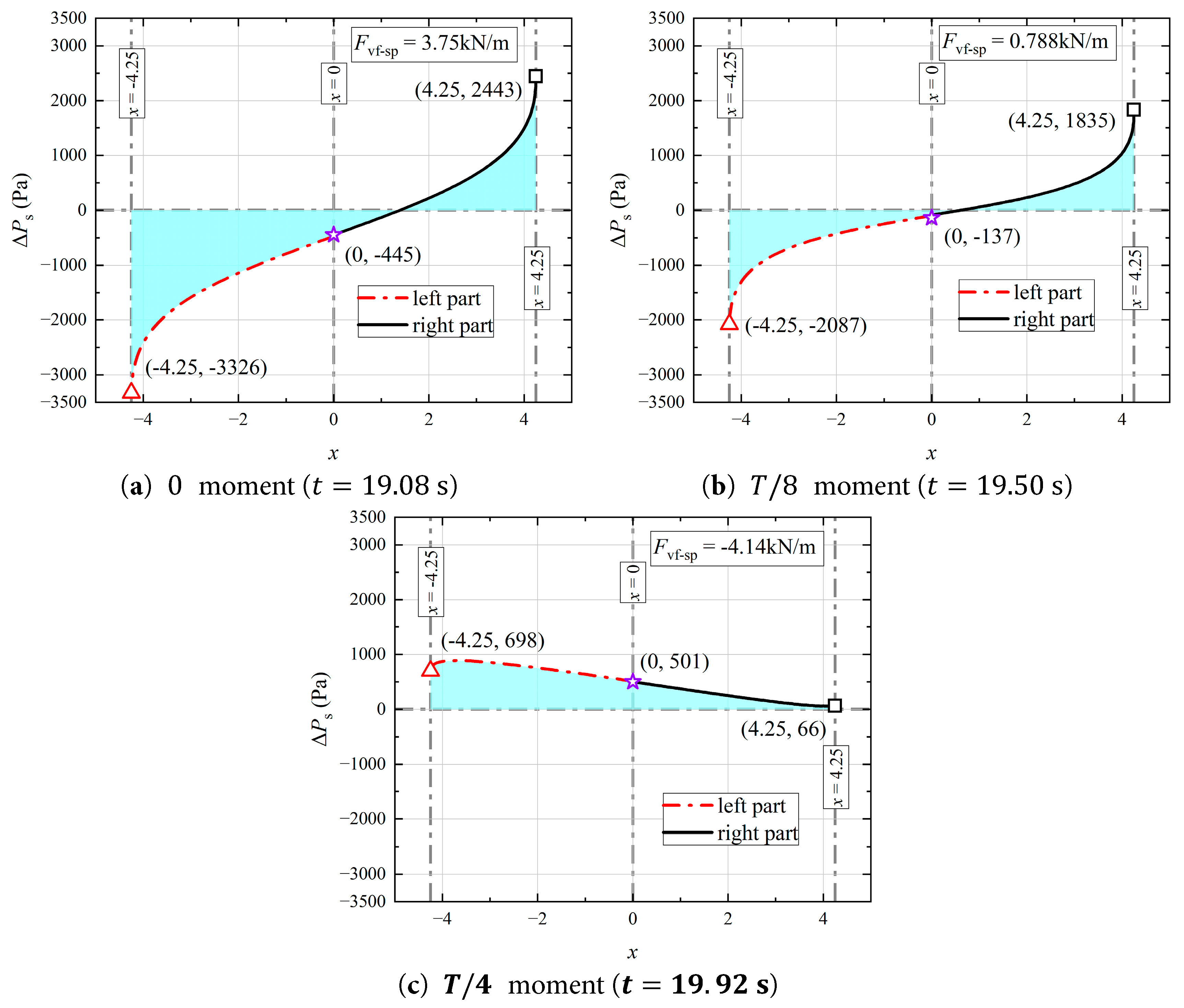
Figure 18: Distribution of
Regarding the change in
When the energy of the water is in the form of potential energy, as shown in Fig. 17a, the fall in the free surface at the symmetry axis due to the asymmetry of free surface fluctuations is the main reason for the decrease in
When the energy of the water inside the aqueduct converts from potential to kinetic energy, as shown in Fig. 14b, the free surface position at the symmetry axis rises slightly as
When the energy of the water inside the container is primarily in the form of kinetic energy, as shown in Fig. 14c,
This study investigates the motion patterns of water in a U-shaped aqueduct under first-order transverse resonance of water through numerical simulations and theoretical analysis. The generation mechanism of sloshing force is explored elaborately and comprehensively. By combining the Euler equations, the temporal correspondence between the extreme and zero values of the horizontal force
- (1)At equilibrium position (
- (2)During motion, water energy alternates between potential and kinetic forms. When
- (3)
- (4)The maximum value of
- (5)
This study does not provide an in-depth analysis of two typical non-resonance cases: (1) Non-resonance cases with low excitation frequencies (
The current study has provided valuable insights into the load generation mechanism under water resonance. In the future, building on this foundation, a comprehensive exploration of suitable active and passive control methods for resonance loads will be a key focus. Given the complexity of the aqueduct structure and the dynamic interactions between the fluid and solid domains, the development of these control methods will be closely integrated with the findings from the two-way fluid–structure coupling model established in the second part of our research. This integration will enable a more accurate assessment of the effectiveness of different control strategies in mitigating resonance loads and optimizing the overall dynamic performance of the aqueduct structure. Additionally, the potential TLD (tuned liquid damper) effect of the water within the aqueduct will be further investigated to explore its role in vibration reduction. The ultimate goal is to develop innovative and efficient vibration reduction devices that can be actively or passively applied to the aqueduct structure, thereby enhancing its resilience and operational safety under various dynamic loading conditions.
Acknowledgement:
Funding Statement: This work is supported by Science and Technology Planning Project of Sichuan Province with Grant No. 2023YFS0429, supported by Science and Technology Project of China Road and Bridge Corporation with Grant No. P2220447, and supported by Foundation of Xinjiang Institute of Engineering 2024 (Grant No. 2024xgy072605), and also supported by Sichuan Natural Science Foundation Project (Grant No. 2024NSFSC0162). The numerical calculations in this study have been done on Hefei advanced computing center.
Author Contributions: The authors confirm contribution to the paper as follows: Yang Dou: Formal Analysis (lead); Methodology (equal); Data Curation (lead); Software (lead); Visualization (equal); Validation (equal); Writing—Original Draft (lead). Hao Qin: Formal Analysis (supporting); Software (supporting); Writing—Original Draft (supporting). Yuzhi Zhang: Supervision (equal); Writing—Review and Editing (equal). Ning Wang: Supervision (equal); Visualization (equal); Writing—Review and Editing (equal). Haiqing Liu: Supervision (equal); Conceptualization (supporting). Wanli Yang: Funding Acquisition (lead); Conceptualization (lead); Methodology (equal); Writing—Original Draft (supporting); Writing—Review and Editing (equal). All authors reviewed the results and approved the final version of the manuscript.
Availability of Data and Materials: The data that support the findings of this study are available from the corresponding author, upon reasonable request.
Ethics Approval: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest to report regarding the present study.
References
1. Zhang P . Earthquake disasters and mitigation in China. Seism Geol. 2008; 30( 3): 577– 83. (In Chinese). [Google Scholar]
2. Huang YX , Qian XD . Model test of TLD effect on aqueduct structure subjected to strong vibration. J Hohai Univ Nat Sci. 2014; 42( 6): 547– 52. (In Chinese). [Google Scholar]
3. Wu Y , Mo HH , Yang C . Analysis on tuned liquid damper effect of 3-D frame supported aqueduct. J Hydraul Eng. 2005; 36( 9): 1115– 20. (In Chinese). [Google Scholar]
4. Ji RC , Xia XS , Chen YL , Wang L . Transverse seismic response of beam aqueduct considering fluid-structure coupling. Acta Seismol Sin. 2007; 20(3): 348– 55. (In Chinese). doi:10.1007/s11589-007-0348-9. [Google Scholar] [CrossRef]
5. Xu JY , Hu XS , Wu YA , Xu GH . Research on aqueduct transverse seismic response based on the TLD effect of water body. J Wuhan Univ Technol. 2012; 34( 10): 96– 100. (In Chinese). [Google Scholar]
6. Li Y , Zhang L . Discussion and suggestions on several issues in seismic-resistance calculation of flumes. Water Resour Power. 2013; 31( 11): 136– 9. (In Chinese). [Google Scholar]
7. Duan QH , Lou ML , Yang LF . Effects of water depth on seismic performance of the aqueduct-water coupling structure. Water Power. 2011; 37( 9): 42– 5. (In Chinese). [Google Scholar]
8. Ocak A , Bekdaş G , Nigdeli SM , Kim S , Geem ZW . Optimization of tuned liquid damper including different liquids for lateral displacement control of single and multi-story structures. Buildings. 2022; 12( 3): 377. doi:10.3390/buildings12030377. [Google Scholar] [CrossRef]
9. Yusuf AO , Hasan MA , Khalil E . Vibration mitigation of wind turbines with tuned liquid damper using fluid-structure coupling analysis. Int J Dyn Control. 2024; 12( 10): 3517– 33. doi:10.1007/s40435-024-01446-z. [Google Scholar] [CrossRef]
10. He X , Li C , Chen L , Yang J , Hu G , Ou J . Numerical research on nonlinear liquid sloshing and vibration control performance of tuned liquid damper. J Build Eng. 2024; 96: 110660. doi:10.1016/j.jobe.2024.110660. [Google Scholar] [CrossRef]
11. Domizio M , Ambrosini D , Campi A . A novel tuned liquid damper for vibration control in high-frequency structures. Eng Struct. 2024; 301: 117350. doi:10.1016/j.engstruct.2023.117350. [Google Scholar] [CrossRef]
12. Sun HD , He HX , Cheng Y , Gao XJ . Theoretical and experimental study on vibration control of a tuned liquid inerter damper with additional damping net and sloped-bottom. Mech Syst Signal Process. 2024; 213: 111356. doi:10.1016/j.ymssp.2024.111356. [Google Scholar] [CrossRef]
13. Zhou Z , Xie Z , Zhang L , Zhang L . Optimal design of multiple tuned liquid dampers with paddles for wind-induced vibration control of high-rise buildings. Structures. 2024; 68: 107094. doi:10.1016/j.istruc.2024.107094. [Google Scholar] [CrossRef]
14. Xue MA , Yang J , Yuan X , Lu Z , Zheng J , Lin P . Vibration controlling effect of tuned liquid column damper (TLCD) on support structural platform (SSP). Ocean Eng. 2024; 306: 118117. doi:10.1016/j.oceaneng.2024.118117. [Google Scholar] [CrossRef]
15. Saghi H , Zi G . Pitch motion reduction of a barge-type floating offshore wind turbine substructure using a bidirectional tuned liquid damper. Ocean Eng. 2024; 304: 117717. doi:10.1016/j.oceaneng.2024.117717. [Google Scholar] [CrossRef]
16. Saghi H , Ma C , Zi G . Bidirectional tuned liquid dampers for stabilizing floating offshore wind turbine substructures. Ocean Eng. 2024; 309: 118553. doi:10.1016/j.oceaneng.2024.118553. [Google Scholar] [CrossRef]
17. Liao C , Zhao Z , Chen Q , Xue Y , Jiang Y . Nonlinear damping baffle-isolated tuned liquid damper for vibration control. Soil Dyn Earthq Eng. 2025; 190: 109213. doi:10.1016/j.soildyn.2025.109213. [Google Scholar] [CrossRef]
18. Akyildiz H , Ünal E . Experimental investigation of pressure distribution on a rectangular tank due to the liquid sloshing. Ocean Eng. 2005; 32( 11–12): 1503– 16. doi:10.1016/j.oceaneng.2004.11.006. [Google Scholar] [CrossRef]
19. Akyildız H , Ünal NE . Sloshing in a three-dimensional rectangular tank: numerical simulation and experimental validation. Ocean Eng. 2006; 33( 16): 2135– 49. doi:10.1016/j.oceaneng.2005.11.001. [Google Scholar] [CrossRef]
20. Liu D , Lin P . A numerical study of three-dimensional liquid sloshing in tanks. J Comput Phys. 2008; 227( 8): 3921– 39. doi:10.1016/j.jcp.2007.12.006. [Google Scholar] [CrossRef]
21. Elahi R , Passandideh-Fard M , Javanshir A . Simulation of liquid sloshing in 2D containers using the volume of fluid method. Ocean Eng. 2015; 96: 226– 44. doi:10.1016/j.oceaneng.2014.12.022. [Google Scholar] [CrossRef]
22. Tosun U , Aghazadeh R , Sert C , Özer MB . Tracking free surface and estimating sloshing force using image processing. Exp Therm Fluid Sci. 2017; 88: 423– 33. doi:10.1016/j.expthermflusci.2017.06.016. [Google Scholar] [CrossRef]
23. Jin X , Lin P . Viscous effects on liquid sloshing under external excitations. Ocean Eng. 2019; 171: 695– 707. doi:10.1016/j.oceaneng.2018.10.024. [Google Scholar] [CrossRef]
24. Cai Z , Topa A , Djukic LP , Herath MT , Pearce GMK . Evaluation of rigid body force in liquid sloshing problems of a partially filled tank: traditional CFD/SPH/ALE comparative study. Ocean Eng. 2021; 236: 109556. doi:10.1016/j.oceaneng.2021.109556. [Google Scholar] [CrossRef]
25. Jiang Z , Shi Z , Jiang H , Huang Z , Huang L . Investigation of the load and flow characteristics of variable mass forced sloshing. Phys Fluids. 2023; 35( 3): 033325. doi:10.1063/5.0142148. [Google Scholar] [CrossRef]
26. Dou Y , Qin H , Zhang Y , Wang N , Liu H , Yang W , et al. Study on simplified calculation method for lateral natural frequency of water within U-shaped aqueducts. Phys Fluids. 2025; 37( 3): 032106. doi:10.1063/5.0254941. [Google Scholar] [CrossRef]
27. Hirt CW , Nichols BD . Volume of fluid (VOF) method for the dynamics of free boundaries. J Comput Phys. 1981; 39( 1): 201– 25. doi:10.1016/0021-9991(81)90145-5. [Google Scholar] [CrossRef]
28. Fluent A . Ansys fluent theory guide. Canonsburg, PA, USA: Ansys Inc USA; 2011. [Google Scholar]
29. Das A , Maity D , Bhattacharyya SK . Characterization of liquid sloshing in U-shaped containers as dampers in high-rise buildings. Ocean Eng. 2020; 210: 107462. doi:10.1016/j.oceaneng.2020.107462. [Google Scholar] [CrossRef]
30. Yang W , Li S , Liu J , Wu W , Li H , Wang N . Numerical study on breaking solitary wave force on box-girder bridge. Adv Bridge Eng. 2021; 2( 1): 28. doi:10.1186/s43251-021-00048-5. [Google Scholar] [CrossRef]
31. Faltinsen OM , Timokha AN . Sloshing. Cambridge, UK: Cambridge University Press; 2009. 606 p. [Google Scholar]
32. Dou P , Xue MA , Zheng J , Zhang C , Qian L . Numerical and experimental study of tuned liquid damper effects on suppressing nonlinear vibration of elastic supporting structural platform. Nonlinear Dyn. 2020; 99( 4): 2675– 91. doi:10.1007/s11071-019-05447-y. [Google Scholar] [CrossRef]
33. Xue MA , Chen Y , Zheng J , Qian L , Yuan X . Fluid dynamics analysis of sloshing pressure distribution in storage vessels of different shapes. Ocean Eng. 2019; 192: 106582. doi:10.1016/j.oceaneng.2019.106582. [Google Scholar] [CrossRef]
34. Li Y , Wang Z . Unstable characteristics of two-dimensional parametric sloshing in various shape tanks: theoretical and experimental analyses. J Vib Control. 2016; 22( 19): 4025– 46. doi:10.1177/1077546315570716. [Google Scholar] [CrossRef]
35. Chen YG , Djidjeli K , Price WG . Numerical simulation of liquid sloshing phenomena in partially filled containers. Comput Fluids. 2009; 38( 4): 830– 42. doi:10.1016/j.compfluid.2008.09.003. [Google Scholar] [CrossRef]
36. Chen YG , Price WG . Numerical simulation of liquid sloshing in a partially filled container with inclusion of compressibility effects. Phys Fluids. 2009; 21( 11): 112105. doi:10.1063/1.3264835. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2025 The Author(s). Published by Tech Science Press.
Copyright © 2025 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools